Радарный датчик присутствия человека Hi-Link HLK-LD2410b c Bluetooth

- Цена: 3.15 $ + 1.2$ доставка
- Перейти в магазин
Всем привет!
Меня давно интересуют радарные технологии. Радары используются повсеместно: в охранных системах, системах контроля скорости, системах мониторинга параметров жизнедеятельности и во многих других.
И вот, в очередной раз, изучая новинки на Aliexpress, я наткнулся на интересную модель HLK-LD2410 – радарный датчик присутствия человека с возможностью измерения расстояния и детектирования как движущихся, так и неподвижных объектов стоимостью всего около 4$ от Hi-Link. Давайте посмотрим, на что он способен.
Радары можно разделить на импульсные, излучающие сигнал только в течение очень короткого времени и радары непрерывного действия. Среди радаров непрерывного действия в свою очередь можно выделить:
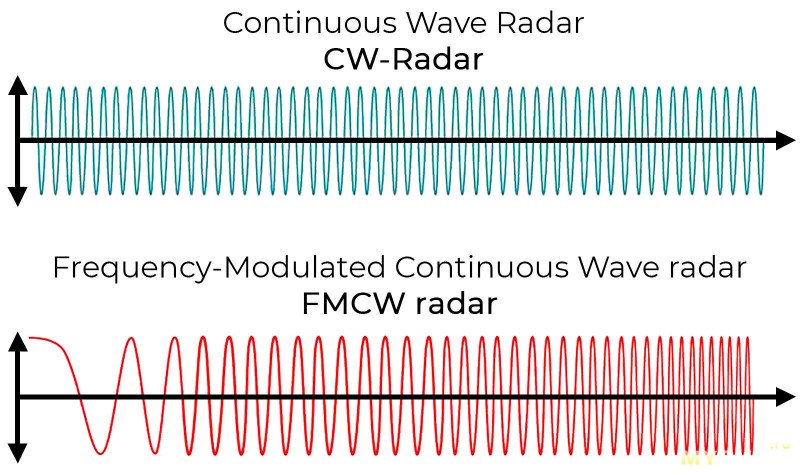
Радары непрерывной волны (Continious Wave, CW-радары).
CW-радар излучает высокочастотный сигнал постоянно, отраженный сигнал принимается и обрабатывается непрерывно. Такой радар, излучающий немодулированный непрерывный сигнал, может измерять только скорость цели с помощью эффекта Доплера, который заключается в изменении частоты сигнала в зависимости от скорости движения источника сигнала. CW-радар не может ни измерить расстояние, ни различить две одновременно освещенные цели. Эти задачи могут решить радары с линейной частотной модуляцией (Frequency-Modulated Continuous Wave, FMCW-радары)
Радиолокатор непрерывного излучения с частотной модуляцией — это особый тип радиолокационных датчиков, непрерывно излучающих сигнал, как и обычный радиолокатор непрерывного излучения. Но в отличие от CW-радара в FMCW-радаре применяется изменение рабочей частоты во время измерения, то есть излучаемый сигнал модулируется по частоте (или фазе). Модуляция сигнала по частоте или фазе дает возможность выполнять измерения длительности интервалов времени, что в свою очередь дает возможность измерять расстояние до неподвижных объектов.
 Основные особенности FMCW-радиолокаторов:
Основные особенности FMCW-радиолокаторов:
— возможность измерения очень малых расстояний до цели (минимальная измеряемая дальность сопоставима с длиной излучаемой волны);
— возможность одновременного измерения дальности до цели и ее относительной скорости;
— очень высокая точность измерения дальности;
— обработка сигналов после смесителя выполняется в диапазоне низких частот, что существенно упрощает реализацию схем обработки;
— лучшая безопасность из-за отсутствия импульсного излучения с большой импульсной мощностью.
Таким образом, радары способны измерять скорость или расстояние, а благодаря обработке сигнала становится возможным измерение многих параметров: детектирование движения, обнаружение присутствия людей, измерение частоты дыхания и сердцебиения, детектирование падений и многое другое.
Радары могут работать на различной частоте, среды устройств бытового применения наиболее часто встречаются радары, работающие на частотах 5.8 ГГц, 10ГГц, 24ГГц, 60ГГц, а также встречаются работающие на более высоких частотах 77 ГГц и выше. Чем выше рабочая частота, тем с большей точностью определяется расстояние, но одновременно и выше аппаратные требования, предъявляемые к радарам. Радары с рабочей частотой 5,8-24 ГГц используются в основном для детектирования движения, 10-24 ГГц для измерения скорости и расстояния, 60ГГц и выше могут использоваться для измерения частоты дыхания и частоты сердцебиения.
Сначала я, не задумываясь, приобрел модуль HLK-LD2410 без интерфейсной платы, а немного позже обнаружил, что существует версия HLK-LD2410b с поддержкой Bluetooth, я заказал её, а заодно и интерфейсную плату.
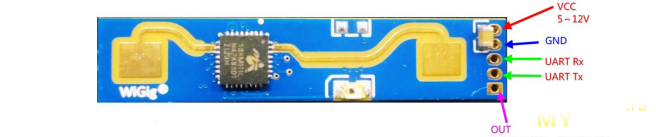
 HLK-LD2410 — это высокочувствительный модуль обнаружения присутствия человека, работающий на частоте 24 ГГц. HLK-LD2410 работает по принципу FMCW радара и способен обнаруживать движущиеся и неподвижные объекты. HLK-LD2410 способен рассчитывать расстояние до объекта, максимальное заявленное расстояние обнаружения составляет 5 метров. Он имеет интерфейс UART для конфигурации и вывод GPIO, состояние которого меняется при обнаружении цели в соответствии с настройками чувствительности. Логический уровень UART и GPIO 3.3 в.
HLK-LD2410 — это высокочувствительный модуль обнаружения присутствия человека, работающий на частоте 24 ГГц. HLK-LD2410 работает по принципу FMCW радара и способен обнаруживать движущиеся и неподвижные объекты. HLK-LD2410 способен рассчитывать расстояние до объекта, максимальное заявленное расстояние обнаружения составляет 5 метров. Он имеет интерфейс UART для конфигурации и вывод GPIO, состояние которого меняется при обнаружении цели в соответствии с настройками чувствительности. Логический уровень UART и GPIO 3.3 в.
 Угол обнаружения объекта по горизонтали и вертикали составляет 120 градусов.
Угол обнаружения объекта по горизонтали и вертикали составляет 120 градусов.
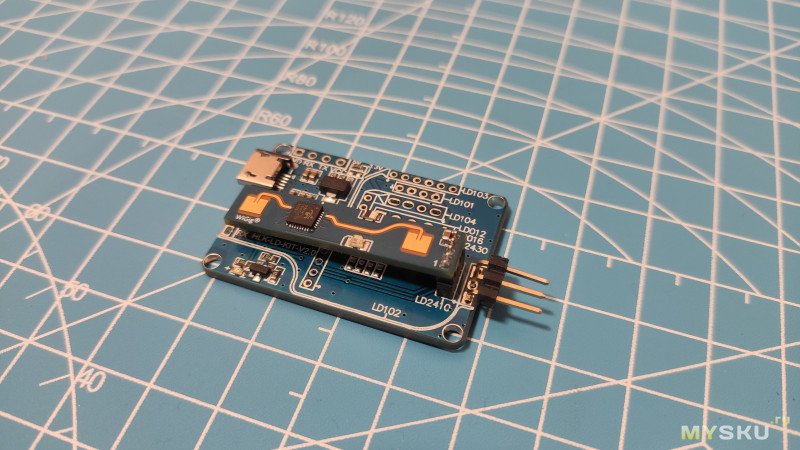
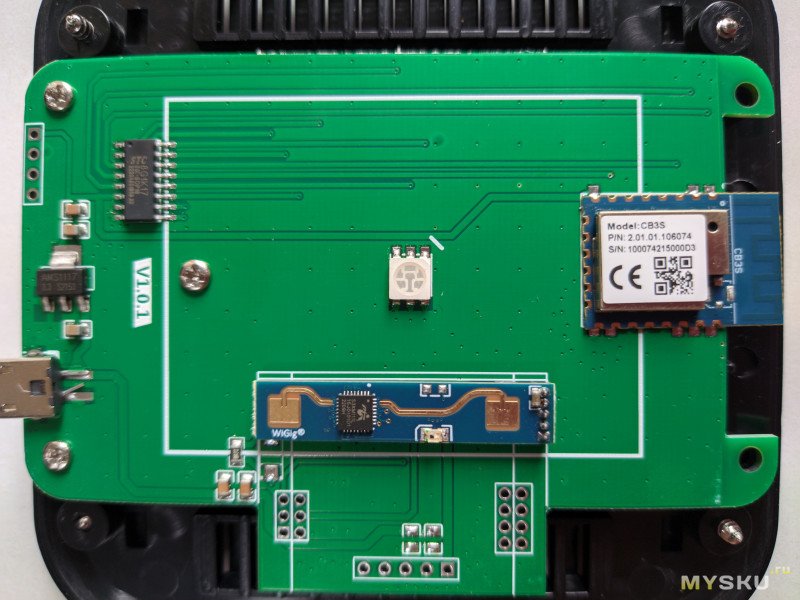
Размер модуля всего 35*7 мм. Интерфейс UART и пин GPIO выведен на 5 контактную колодку с шагом 1,27 мм, разъемы с таким шагом распространены не широко, поэтому для отладки имеет смысл сразу заказать интерфейсную плату. Она содержит USB-Uart конвертер CH340 и стабилизатор напряжения AMS1117. Для подключения к компьютеру предусмотрен разъем micro-usb. Интерфейсная плата универсальна и подходит для разных радарных модулей, выпускаемых Hi-Link.
 Сам радар построен на двух микросхемах: S3KM111L и 8P0K234 (если я правильно разобрал маркировку).
Сам радар построен на двух микросхемах: S3KM111L и 8P0K234 (если я правильно разобрал маркировку).
 S3KM111L реализует всю радиочастотную часть и представляет собой интегрированный монолитный однокристальный датчик миллиметрового диапазона, основанный на радиолокационной технологии FMCW. Он работает в K-диапазоне 24 ГГц с полосой модуляции до 1 ГГц в каждом одночастотном чирпе развертки.
S3KM111L реализует всю радиочастотную часть и представляет собой интегрированный монолитный однокристальный датчик миллиметрового диапазона, основанный на радиолокационной технологии FMCW. Он работает в K-диапазоне 24 ГГц с полосой модуляции до 1 ГГц в каждом одночастотном чирпе развертки.
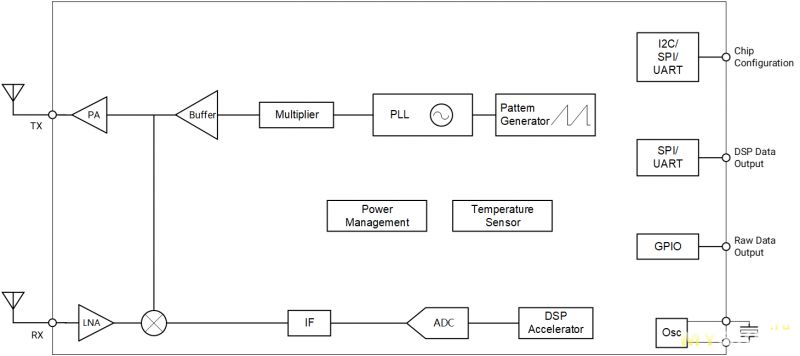
Он включает полноценный радиочастотный приемопередатчик K-диапазона, управляемый встроенным генератором шаблонов и ФАПЧ. Генератор шаблонов поддерживает несколько шаблонов развертки по частоте с различными формами сигналов время-частота, такими как пилообразный или треугольный. Генератор паттернов и ФАПЧ поддерживают быстрые чирп-паттерны до 8 кГц.
Радиочастотная и аналоговая подсистемы включают передатчик и приемник. Регулировка усиления применяется к передатчику и приемнику для настройки общей ширины канала для работы в различных сценариях. Приемник интегрирует модулирующую полосу IQ, включаяет усилители промежуточной частоты, фильтры и АЦП. Встроенный ускоритель DSP может обрабатывать необработанные данные АЦП IQ с помощью БПФ или доплеровского БПФ. Обработанные данные могут быть сериализованы и выведены через интерфейс SPI или UART.
 Благодаря высокому уровню интеграции для S3KM111L требуется всего несколько внешних компонентов, которые легко настроить, например, внешний кварцевый генератор и стабилизирующие конденсаторы.
Благодаря высокому уровню интеграции для S3KM111L требуется всего несколько внешних компонентов, которые легко настроить, например, внешний кварцевый генератор и стабилизирующие конденсаторы.
Вот основные особенности S3KM111L:
— Высокоинтегрированный радиолокационный датчик FMCW 24 ГГц K-диапазона SoC
— Диапазон настройки частотной модуляции с полосой пропускания до 1 ГГц
— Один канал передачи и один канал приема
— Интегрированный генератор сигналов и ФАПЧ с низким фазовым шумом
— Встроенный 16-битный АЦП приемника
— Аппаратный ускоритель для фильтрации и БПФ
— Встроенный датчик температуры
— Максимальная выходная мощность: 12 дБм
— Команды I²C/SPI/UART для настройки микросхемы
— Интерфейсы SPI/UART для последовательного вывода данных
— Одно напряжение питания 3,3 в
— Компоненты QFN32 4 x 4 м
— Диапазон температур от -40°C до 105°C
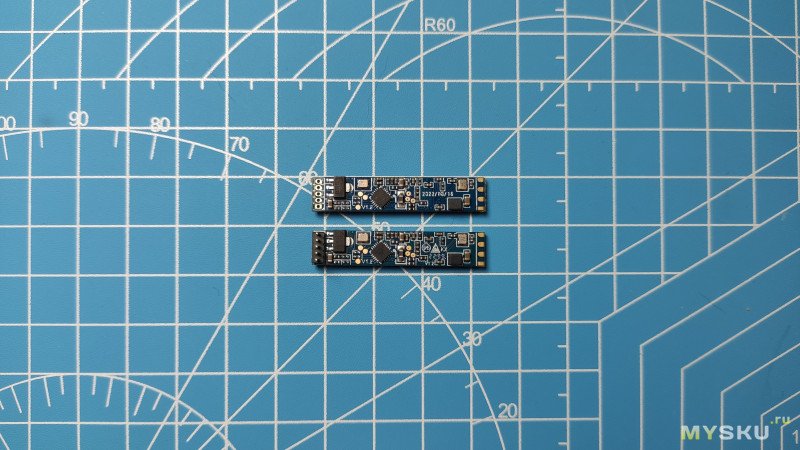
Идентифицировать чип 8P0K234 не удалось. Очевидно, он реализует обработку сигнала и логическую часть. Внешне версии с поддержкой Bluetooth и без практически ничем не отличаются, есть лишь единственный элемент, который присутствует на плате с поддержкой Bluetooth, и он, очевидно, является антенной, за реализацию Bluetooth отвечает, вероятно, неопознанный 8P0K234.
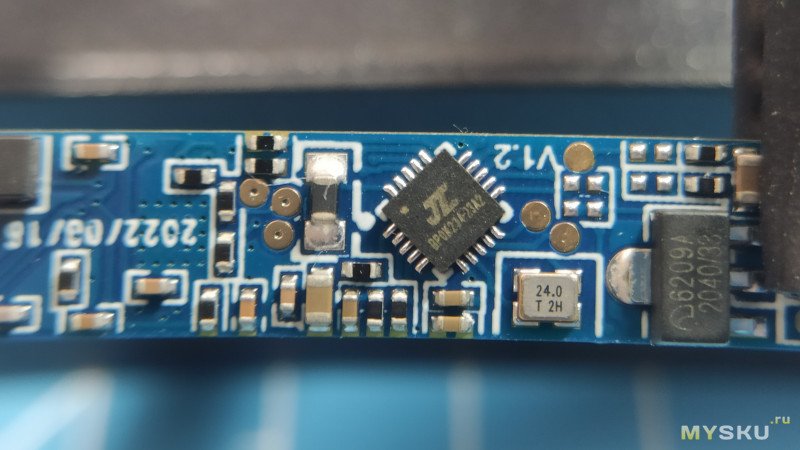 Также на плате установлен стабилизатор напряжения на 3.3в ME6209. Напряжение питания составляет от 5 до 24 в, заявленное потребление – 79 мА.
Также на плате установлен стабилизатор напряжения на 3.3в ME6209. Напряжение питания составляет от 5 до 24 в, заявленное потребление – 79 мА.
Найди 1 отличие

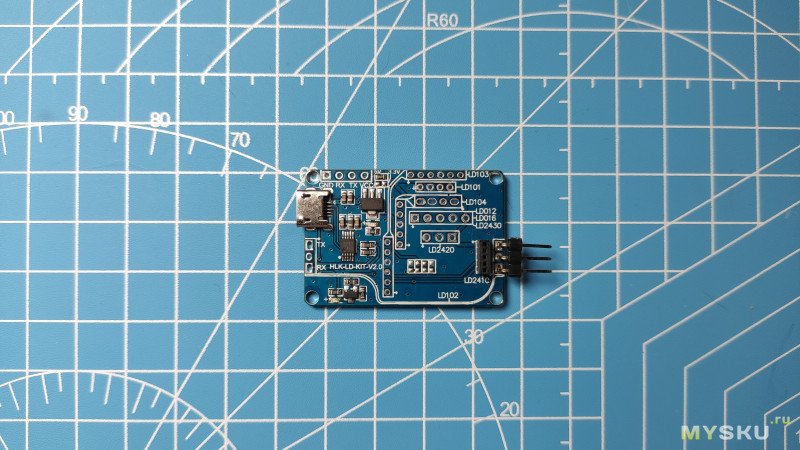
 Также недавно появился модуль HLK-LD2410C, который, очевидно, отличается только компоновкой элементов и использованием более удобной гребенки PLC с шагом 2.54 мм.
Также недавно появился модуль HLK-LD2410C, который, очевидно, отличается только компоновкой элементов и использованием более удобной гребенки PLC с шагом 2.54 мм.
 При подключении радара к компьютеру автоматически устанавливаются драйвера, и в системе появляется виртуальный ком-порт. Для управления радаром есть ПО на английском языке, интерфейс программы выглядит следующим образом.
При подключении радара к компьютеру автоматически устанавливаются драйвера, и в системе появляется виртуальный ком-порт. Для управления радаром есть ПО на английском языке, интерфейс программы выглядит следующим образом.
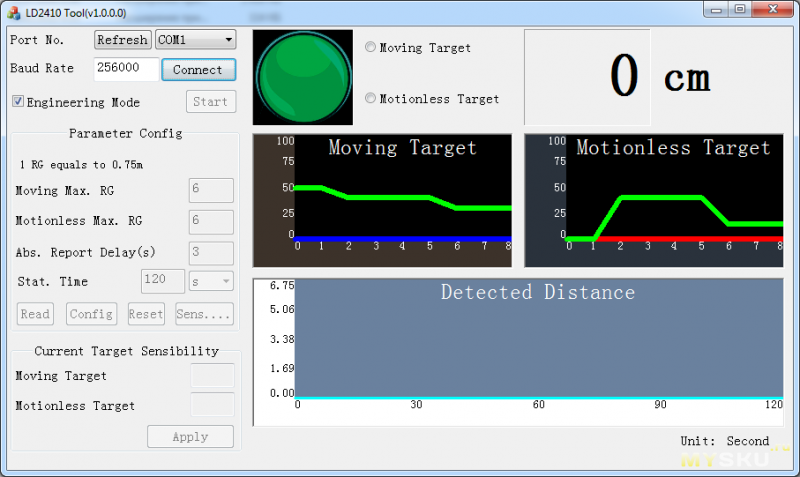 Слева расположены элементы управления и конфигурации справа – визуализация работы радара в виде индикатора обнаружения движущегося или неподвижного объекта, ниже два графика, отображающие текущие настройки чувствительности для обнаружения подвижных и неподвижных целей и сигнал с радара. Ниже выводится динамический график расстояния обнаружения объектов. В правом верхнем углу выводится расстояние до объекта в сантиметрах.В нижнем левом углу выводится текущий уровень сигнала для неподвижной и подвижной цели. Abs. Report delay задает время задержки в секундах, в течении которого вывод GPIO остается в высоком состоянии после исчезновения объекта из поля зрения.
Слева расположены элементы управления и конфигурации справа – визуализация работы радара в виде индикатора обнаружения движущегося или неподвижного объекта, ниже два графика, отображающие текущие настройки чувствительности для обнаружения подвижных и неподвижных целей и сигнал с радара. Ниже выводится динамический график расстояния обнаружения объектов. В правом верхнем углу выводится расстояние до объекта в сантиметрах.В нижнем левом углу выводится текущий уровень сигнала для неподвижной и подвижной цели. Abs. Report delay задает время задержки в секундах, в течении которого вывод GPIO остается в высоком состоянии после исчезновения объекта из поля зрения.
Для подключения к радару необходимо сначала нажать connect, затем start, при этом сигнал с радара будет выводиться в реальном времени. Скорость передачи данных составляет 256000 бод. Есть возможность считать текущие настройки чувствительности, сбросить до дефолтных или задать собственные. Зеленая линия на графиках обнаружения движущихся и неподвижных объектов задает пороговое значение уровня сигнала, при превышении которого меняется состояние на выходе GPIO. Для изменения порогового значения необходимо нажать на кнопку Sensitivity и задать уровень чувствительности для каждого отсчета расстояния с шагом 0,75м. Чувствительность для каждого диапазона задается независимо. Настройки сохраняется после отключения питания датчика.
Также можно задать максимальное расстояние для обнаружения подвижных и неподвижных объектов и время развертки динамического графика обнаружения.
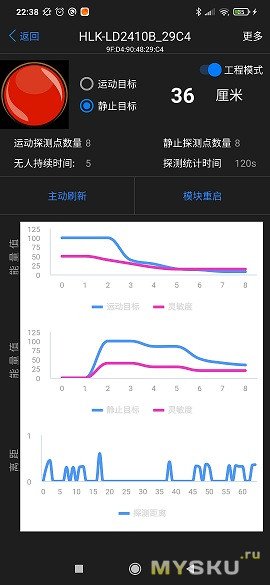
Для версии с поддержкой Bluetooth есть мобильное приложение для android, правда оно пока только на китайском языке. Поэтому его проблематично использовать для настройки радара, только лишь для визуализации данных. За время тестирования мобильное приложение обновилось уже несколько раз, и я надеюсь что, оно будет переведено на английский язык.
 Интерфейс UART служит в первую очередь для конфигурации, но есть описание протокола передачи данных и его можно использовать в своих приложениях.
Интерфейс UART служит в первую очередь для конфигурации, но есть описание протокола передачи данных и его можно использовать в своих приложениях.
Радар предусматривает различные способы установки, такие как потолочное подвесное или настенное подвесное. Радар может быть установлен внутри неметаллического корпуса. Возможные варианты установки и соответствующая им зона обнаружения приведены в даташите.
Для теста я установил его на штатив, на высоте примерно 1,2 м. На интерфейсной плате я запаял гребенку для вывода порта GPIO и земли и соединил их с мосфетом, который управляет светодиодной лентой, подключенной к источнику питания 12В.
Радар оказался довольно чувствительным и движущиеся объекты детектирует безошибочно, обнаруживает не только людей, но и, например, кошек, поэтому, чтобы избежать ложных срабатываний владельцам домашних животных, вероятно, стоит уменьшить чувствительность обнаружения движущихся объектов. Максимальное расстояние обнаружения примерно соответствует заявленному в 5 м.
Неподвижные или микродвижщиеся объекты детектируются также довольно уверенно, но при абсолютном покое и на большом расстоянии радар иногда теряет объект. Благодаря гибким настройкам чувствительности можно добиться желаемого результата в конкретных условиях.
При настройках чувствительности, установленных по умолчанию, через бетонную стену датчик не срабатывает, а через легкую деревянную дверь срабатывает безошибочно.
Расстояние определяется достаточно точно. Минимальное измеряемое расстояние составляет порядка 35 см. В мобильном приложении, насколько я понял, можно задать разрешение обнаружения цели равное 0,75 или 0,2м.
Кстати на датчик отлично реагирует радар-детектор.
При питании от 5в через интерфейсную плату HLK-LD2410 потребляет порядка 87 мА, при питании напрямую вероятно меньше, но все же его вряд ли получится использовать в автономном режиме с питанием от аккумулятора. И это, наверное, главный недостаток датчиков подобного типа.
 Наглядно демонстрация работы датчика показана в видео.
Наглядно демонстрация работы датчика показана в видео.
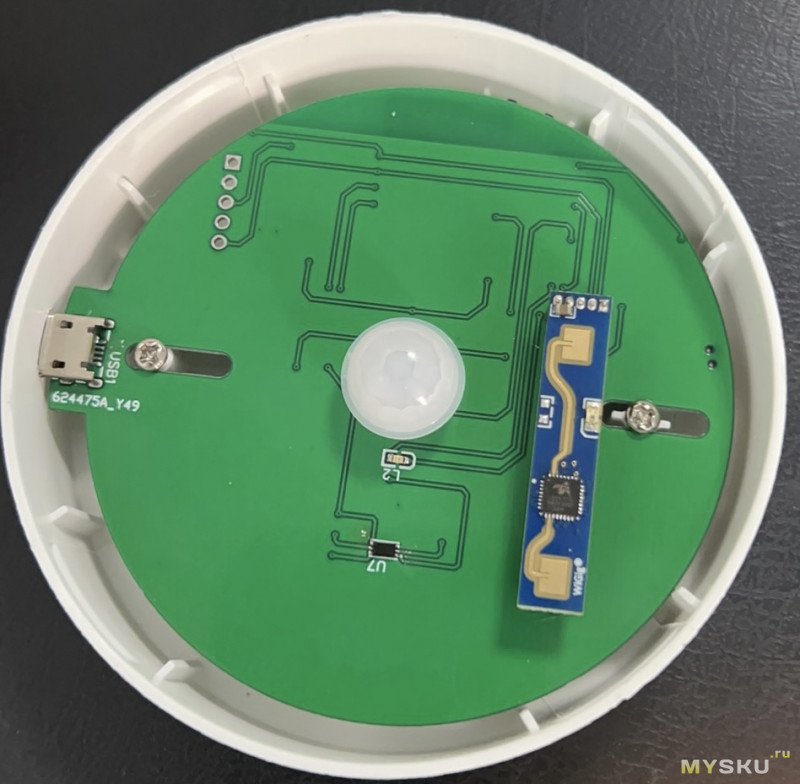
 В некоторых из устройств он сочетается со стандартным PIR-сенсором.
В некоторых из устройств он сочетается со стандартным PIR-сенсором.
 Я давно задумывался о реализации простой охранной системы на основе датчиков движения для дома, и наверняка, если решу её организовать, то буду использовать данный радарный модуль или аналогичные ему. Мне понравилась его предсказуемая работа, гибкие настройки чувствительности, отсутствие ложных срабатываний и практически полное отсутствие выключений при нахождении в зоне его видимости. Естественно, данный модуль идеально подойдет для автоматического управления освещением, да и для любых других устройств, для которых это актуально. Доступная информация и программное обеспечение позволяют использовать все возможности данного модуля, а в сочетании с низкой ценой это делает его весьма привлекательным.
Я давно задумывался о реализации простой охранной системы на основе датчиков движения для дома, и наверняка, если решу её организовать, то буду использовать данный радарный модуль или аналогичные ему. Мне понравилась его предсказуемая работа, гибкие настройки чувствительности, отсутствие ложных срабатываний и практически полное отсутствие выключений при нахождении в зоне его видимости. Естественно, данный модуль идеально подойдет для автоматического управления освещением, да и для любых других устройств, для которых это актуально. Доступная информация и программное обеспечение позволяют использовать все возможности данного модуля, а в сочетании с низкой ценой это делает его весьма привлекательным.
Меня давно интересуют радарные технологии. Радары используются повсеместно: в охранных системах, системах контроля скорости, системах мониторинга параметров жизнедеятельности и во многих других.
И вот, в очередной раз, изучая новинки на Aliexpress, я наткнулся на интересную модель HLK-LD2410 – радарный датчик присутствия человека с возможностью измерения расстояния и детектирования как движущихся, так и неподвижных объектов стоимостью всего около 4$ от Hi-Link. Давайте посмотрим, на что он способен.
Для начала немного теории
Радиолокатор или рада́р (англ. radar от radio detection and ranging – радиообнаружение и измерение дальности) – это радиотехническая система для обнаружения объектов, а также для определения их дальности, скорости и геометрических параметров. Радар использует метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от объектов.Радары можно разделить на импульсные, излучающие сигнал только в течение очень короткого времени и радары непрерывного действия. Среди радаров непрерывного действия в свою очередь можно выделить:
Радары непрерывной волны (Continious Wave, CW-радары).
CW-радар излучает высокочастотный сигнал постоянно, отраженный сигнал принимается и обрабатывается непрерывно. Такой радар, излучающий немодулированный непрерывный сигнал, может измерять только скорость цели с помощью эффекта Доплера, который заключается в изменении частоты сигнала в зависимости от скорости движения источника сигнала. CW-радар не может ни измерить расстояние, ни различить две одновременно освещенные цели. Эти задачи могут решить радары с линейной частотной модуляцией (Frequency-Modulated Continuous Wave, FMCW-радары)
Радиолокатор непрерывного излучения с частотной модуляцией — это особый тип радиолокационных датчиков, непрерывно излучающих сигнал, как и обычный радиолокатор непрерывного излучения. Но в отличие от CW-радара в FMCW-радаре применяется изменение рабочей частоты во время измерения, то есть излучаемый сигнал модулируется по частоте (или фазе). Модуляция сигнала по частоте или фазе дает возможность выполнять измерения длительности интервалов времени, что в свою очередь дает возможность измерять расстояние до неподвижных объектов.
Основные особенности FMCW-радиолокаторов:— возможность измерения очень малых расстояний до цели (минимальная измеряемая дальность сопоставима с длиной излучаемой волны);
— возможность одновременного измерения дальности до цели и ее относительной скорости;
— очень высокая точность измерения дальности;
— обработка сигналов после смесителя выполняется в диапазоне низких частот, что существенно упрощает реализацию схем обработки;
— лучшая безопасность из-за отсутствия импульсного излучения с большой импульсной мощностью.
Таким образом, радары способны измерять скорость или расстояние, а благодаря обработке сигнала становится возможным измерение многих параметров: детектирование движения, обнаружение присутствия людей, измерение частоты дыхания и сердцебиения, детектирование падений и многое другое.
Радары могут работать на различной частоте, среды устройств бытового применения наиболее часто встречаются радары, работающие на частотах 5.8 ГГц, 10ГГц, 24ГГц, 60ГГц, а также встречаются работающие на более высоких частотах 77 ГГц и выше. Чем выше рабочая частота, тем с большей точностью определяется расстояние, но одновременно и выше аппаратные требования, предъявляемые к радарам. Радары с рабочей частотой 5,8-24 ГГц используются в основном для детектирования движения, 10-24 ГГц для измерения скорости и расстояния, 60ГГц и выше могут использоваться для измерения частоты дыхания и частоты сердцебиения.
Перейдем непосредственно к герою обзора
Компания Hi-Link, наверняка, знакома многим благодаря довольно качественным источникам питания, но у них есть множество других устройств, среди которых целая линейка радарных модулей. HLK-LD2410 – это датчик присутствия человека, который является альтернативой PIR-датчикам движения.Сначала я, не задумываясь, приобрел модуль HLK-LD2410 без интерфейсной платы, а немного позже обнаружил, что существует версия HLK-LD2410b с поддержкой Bluetooth, я заказал её, а заодно и интерфейсную плату.
HLK-LD2410 — это высокочувствительный модуль обнаружения присутствия человека, работающий на частоте 24 ГГц. HLK-LD2410 работает по принципу FMCW радара и способен обнаруживать движущиеся и неподвижные объекты. HLK-LD2410 способен рассчитывать расстояние до объекта, максимальное заявленное расстояние обнаружения составляет 5 метров. Он имеет интерфейс UART для конфигурации и вывод GPIO, состояние которого меняется при обнаружении цели в соответствии с настройками чувствительности. Логический уровень UART и GPIO 3.3 в.Угол обнаружения объекта по горизонтали и вертикали составляет 120 градусов.Размер модуля всего 35*7 мм. Интерфейс UART и пин GPIO выведен на 5 контактную колодку с шагом 1,27 мм, разъемы с таким шагом распространены не широко, поэтому для отладки имеет смысл сразу заказать интерфейсную плату. Она содержит USB-Uart конвертер CH340 и стабилизатор напряжения AMS1117. Для подключения к компьютеру предусмотрен разъем micro-usb. Интерфейсная плата универсальна и подходит для разных радарных модулей, выпускаемых Hi-Link.
Сам радар построен на двух микросхемах: S3KM111L и 8P0K234 (если я правильно разобрал маркировку). S3KM111L реализует всю радиочастотную часть и представляет собой интегрированный монолитный однокристальный датчик миллиметрового диапазона, основанный на радиолокационной технологии FMCW. Он работает в K-диапазоне 24 ГГц с полосой модуляции до 1 ГГц в каждом одночастотном чирпе развертки.Он включает полноценный радиочастотный приемопередатчик K-диапазона, управляемый встроенным генератором шаблонов и ФАПЧ. Генератор шаблонов поддерживает несколько шаблонов развертки по частоте с различными формами сигналов время-частота, такими как пилообразный или треугольный. Генератор паттернов и ФАПЧ поддерживают быстрые чирп-паттерны до 8 кГц.
Радиочастотная и аналоговая подсистемы включают передатчик и приемник. Регулировка усиления применяется к передатчику и приемнику для настройки общей ширины канала для работы в различных сценариях. Приемник интегрирует модулирующую полосу IQ, включаяет усилители промежуточной частоты, фильтры и АЦП. Встроенный ускоритель DSP может обрабатывать необработанные данные АЦП IQ с помощью БПФ или доплеровского БПФ. Обработанные данные могут быть сериализованы и выведены через интерфейс SPI или UART.
Благодаря высокому уровню интеграции для S3KM111L требуется всего несколько внешних компонентов, которые легко настроить, например, внешний кварцевый генератор и стабилизирующие конденсаторы. Вот основные особенности S3KM111L:
— Высокоинтегрированный радиолокационный датчик FMCW 24 ГГц K-диапазона SoC
— Диапазон настройки частотной модуляции с полосой пропускания до 1 ГГц
— Один канал передачи и один канал приема
— Интегрированный генератор сигналов и ФАПЧ с низким фазовым шумом
— Встроенный 16-битный АЦП приемника
— Аппаратный ускоритель для фильтрации и БПФ
— Встроенный датчик температуры
— Максимальная выходная мощность: 12 дБм
— Команды I²C/SPI/UART для настройки микросхемы
— Интерфейсы SPI/UART для последовательного вывода данных
— Одно напряжение питания 3,3 в
— Компоненты QFN32 4 x 4 м
— Диапазон температур от -40°C до 105°C
Идентифицировать чип 8P0K234 не удалось. Очевидно, он реализует обработку сигнала и логическую часть. Внешне версии с поддержкой Bluetooth и без практически ничем не отличаются, есть лишь единственный элемент, который присутствует на плате с поддержкой Bluetooth, и он, очевидно, является антенной, за реализацию Bluetooth отвечает, вероятно, неопознанный 8P0K234.
Также на плате установлен стабилизатор напряжения на 3.3в ME6209. Напряжение питания составляет от 5 до 24 в, заявленное потребление – 79 мА.Найди 1 отличие
Также недавно появился модуль HLK-LD2410C, который, очевидно, отличается только компоновкой элементов и использованием более удобной гребенки PLC с шагом 2.54 мм.При подключении радара к компьютеру автоматически устанавливаются драйвера, и в системе появляется виртуальный ком-порт. Для управления радаром есть ПО на английском языке, интерфейс программы выглядит следующим образом.Слева расположены элементы управления и конфигурации справа – визуализация работы радара в виде индикатора обнаружения движущегося или неподвижного объекта, ниже два графика, отображающие текущие настройки чувствительности для обнаружения подвижных и неподвижных целей и сигнал с радара. Ниже выводится динамический график расстояния обнаружения объектов. В правом верхнем углу выводится расстояние до объекта в сантиметрах.В нижнем левом углу выводится текущий уровень сигнала для неподвижной и подвижной цели. Abs. Report delay задает время задержки в секундах, в течении которого вывод GPIO остается в высоком состоянии после исчезновения объекта из поля зрения.Для подключения к радару необходимо сначала нажать connect, затем start, при этом сигнал с радара будет выводиться в реальном времени. Скорость передачи данных составляет 256000 бод. Есть возможность считать текущие настройки чувствительности, сбросить до дефолтных или задать собственные. Зеленая линия на графиках обнаружения движущихся и неподвижных объектов задает пороговое значение уровня сигнала, при превышении которого меняется состояние на выходе GPIO. Для изменения порогового значения необходимо нажать на кнопку Sensitivity и задать уровень чувствительности для каждого отсчета расстояния с шагом 0,75м. Чувствительность для каждого диапазона задается независимо. Настройки сохраняется после отключения питания датчика.
Также можно задать максимальное расстояние для обнаружения подвижных и неподвижных объектов и время развертки динамического графика обнаружения.
Для версии с поддержкой Bluetooth есть мобильное приложение для android, правда оно пока только на китайском языке. Поэтому его проблематично использовать для настройки радара, только лишь для визуализации данных. За время тестирования мобильное приложение обновилось уже несколько раз, и я надеюсь что, оно будет переведено на английский язык.
Интерфейс UART служит в первую очередь для конфигурации, но есть описание протокола передачи данных и его можно использовать в своих приложениях. Радар предусматривает различные способы установки, такие как потолочное подвесное или настенное подвесное. Радар может быть установлен внутри неметаллического корпуса. Возможные варианты установки и соответствующая им зона обнаружения приведены в даташите.
Для теста я установил его на штатив, на высоте примерно 1,2 м. На интерфейсной плате я запаял гребенку для вывода порта GPIO и земли и соединил их с мосфетом, который управляет светодиодной лентой, подключенной к источнику питания 12В.
Радар оказался довольно чувствительным и движущиеся объекты детектирует безошибочно, обнаруживает не только людей, но и, например, кошек, поэтому, чтобы избежать ложных срабатываний владельцам домашних животных, вероятно, стоит уменьшить чувствительность обнаружения движущихся объектов. Максимальное расстояние обнаружения примерно соответствует заявленному в 5 м.
Неподвижные или микродвижщиеся объекты детектируются также довольно уверенно, но при абсолютном покое и на большом расстоянии радар иногда теряет объект. Благодаря гибким настройкам чувствительности можно добиться желаемого результата в конкретных условиях.
При настройках чувствительности, установленных по умолчанию, через бетонную стену датчик не срабатывает, а через легкую деревянную дверь срабатывает безошибочно.
Расстояние определяется достаточно точно. Минимальное измеряемое расстояние составляет порядка 35 см. В мобильном приложении, насколько я понял, можно задать разрешение обнаружения цели равное 0,75 или 0,2м.
Кстати на датчик отлично реагирует радар-детектор.
При питании от 5в через интерфейсную плату HLK-LD2410 потребляет порядка 87 мА, при питании напрямую вероятно меньше, но все же его вряд ли получится использовать в автономном режиме с питанием от аккумулятора. И это, наверное, главный недостаток датчиков подобного типа.
Наглядно демонстрация работы датчика показана в видео.Заключение
HLK-LD2410 является законченным продуктом и применяется, например, в устройствах популярной экосистемы умного дома Tuya.В некоторых из устройств он сочетается со стандартным PIR-сенсором.Я давно задумывался о реализации простой охранной системы на основе датчиков движения для дома, и наверняка, если решу её организовать, то буду использовать данный радарный модуль или аналогичные ему. Мне понравилась его предсказуемая работа, гибкие настройки чувствительности, отсутствие ложных срабатываний и практически полное отсутствие выключений при нахождении в зоне его видимости. Естественно, данный модуль идеально подойдет для автоматического управления освещением, да и для любых других устройств, для которых это актуально. Доступная информация и программное обеспечение позволяют использовать все возможности данного модуля, а в сочетании с низкой ценой это делает его весьма привлекательным.
Самые обсуждаемые обзоры
| +45 |
3126
52
|
| +39 |
1288
51
|
| +22 |
2480
36
|
P/S Статью пока так, по диагонали прочитал, но а так- у меня все никак руки не дойдут до подобных датчиков только на 5.6 Ггц, причем у меня в монолите сделан датчик- т.е такая же платка, но радиочасть и мк отвечающий за обработку сигналов находятся в одной микросхеме производства airtouch. А сами платки тоже от хайлинка. Надо кстати и на 24 Ггц радары купить на пробу, как в статье. Может накатаю сравнительный обзор после.
В основном же надо все это так, чтобы на собаку не срабатывало, а на людей работало. Пока что это решают просто градусами, но может действительно на некрупную собаку будет проще логику разделить.
Надеюсь это не нарушает местные правила :-)
Промышленные радиоволновые сейчас редкость именно по этой причине, делают комби. И они друг на друга влияют, в смысле — радиоволновые.
Отопление дали — шторы зашатало — ИК начали ложняки слать. Ок. Шторы убрали. От горячих батарей, видимо от конвекции, всё равно ИКшки ложняки шлют. Летом форточки приоткрываешь, опять начинают лажать.
Сейчас микроволновики стоят, им вообще на всё пофиг, только на тело реагируют. А в туалете вообще закинул датчик за гипсокартон, его не видно, но он работает. И прекрасно работает, и вопросов ни у кого нет, что там за пласмаска такая, потому что его не видно.
Радиоволновые… Например в офисе они будут реагировать на проходящих в коридоре или соседней комнате сквозь гипсокартон. В каждой избушке свои игрушки…
Я пробовал по Bluetooth, разными адаптерами, дальность довольно паршивая, метров 5. Если хоть одна стена, и того меньше. Да и на прямой видимости постоянно отваливается. Тестировал в home assistant, с LD2410 BLE-интеграцией.
Мечтаю заиметь ld2410 с подключением к сети проводом с POE.
Скажите, это реально сделать человеку который не знает какими нитками нужно прошивать прошивки?
yandex.by/images/search?from=tabbar&text=%D1%88%D0%B0%D0%BF%D0%BE%D1%87%D0%BA%D0%B0%20%D0%B8%D0%B7%20%D1%84%D0%BE%D0%BB%D1%8C%D0%B3%D0%B8&pos=8&img_url=http%3A%2F%2Fcdn.fishki.net%2Fupload%2Fpost%2F201503%2F30%2F1483256%2F3_2.jpg&rpt=simage&lr=158
И сложности с регулировкой для крупных животных?
Во-вторых: с этим датчиком вам не потребуется ничего отгораживать, он очень тонко настраивается. Но если вы с собакой одной весовой категории, то могут быть проблемы, тут у вас и рост, скорее всего примерно одинаков, так что скрытие областей не поможет, тут камера с ии подойдёт.
Или вы хозяйка квартиры сдающая комнаты?
А «банка из под кофе» — та ещё лотерея. :)
Можно быть фотографом, и заморочится с освещением по гланды, температура цвета, яркость, равномерность, площадь рассеивания, пульсации… А мне, образно, просто под ногами подсветить, чтоб в лужу не вляпаться, и оно работает.
Очень может оказаться, что без «банки из-под кофе» даже лучше…
Если нужно, чтоб реагировал через стену, ищите низкочастотные, меньше 10ГГц, например от автомобильных охранных систем. Если не нужно, то высокочастотные. Есть датчики на 60ГГц, они могут с 3х метров пульс у человека посчитать.
Кстати, все пишут, что дальность 5м. На самом деле 7. И у меня он как раз детектит на 6-7 метров.
В общем пока PIR датчики наше все.
У PIR есть фатальный недостаток — они не видят неподвижные объекты.
Особенно при приоткрытых форточках и окнах, и шторах на окнах. :))))
Идея в том, чтобы двумя датчиками, расположенными скажем в двух углах помещения, «смотреть» на один и тот же объект, чтобы определить положение объекта в помещении путем триангуляции. Получится?
Тогда уж ставить относительно недалеко и параллельно друг другу, как глаза. Тогда можно будет определить угол по горизонтали до единичного сферического коня в вакууме.
А вообще вопрос занятный, можно ли такие датчики рядом.
При определении положения мы рисуем сферы(круги) с центрами расположенными в точках нахождения «детекторов» и радиусом равным расстоянию определённым детектором.
Два детектора будут давать две сферы(круга) их пересечение будут давать либо две точки на плоскости либо окружность в 3х мерном пространстве, поэтому используют третий детектор который даёт однозначный результат (ещё одну сферу или круг где точка пересечение всех трёх и есть результат триангуляции)
Однако если задача определять положение в комнате (в 2х мерном пространстве) то датчики размещённые по углам одной стенки будут давать 2 координаты одну в комнате одну за её пределами (её отбрасываем и остаётся только одна). А вот датчики размещённые по диагоналям могут давать двоякие результаты.
Спасибо!
Там на самом деле довольно всё сложно с определением положения, особенно когда дело касается нескольких людей. Даже 2 и более подобных датчиков, как их не располагай, оставляют слишком большое пространство для возникновения «неразрешимых» ситуаций, которые будут выражаться в ошибках положений объектов. По сути данный датчик в виде радара положения использовать нельзя. Только в виде радара присутствия. Для определения положения лучше использовать лидар, благо те имеют тенденцию к резкому снижению стоимости из-за отхода от механики к использованию mems.
А вот эти штуки человеков находят очень просто и дёшево. этих плат можно купить ведро по цене лидара
Заранее спасибо.
С учётом моего когда-то, ну скажем, небольшого бэкграунда по миллиметрам, то получается это супер система для охранников и тп. Значит Можно получать 3D метку от объекта, причём подделать её почти невозможно. К примеру, у каждой кошки будет своя. Даже у полных близняшек. Это ещё на 6 гигах можно было.
А вот там, поляризацию сигнала ещё бы менять… :-)) ну это я так, мысли вслух.
Удачи вам! И про шапочку, что тут писали не забывайте, ну и трусы из фольги тоже! :-))
Пожалуйста, не нужно так делать. «Так» — это в смысле фотать что-то вдали. Обрезайте фотографии, иначе получится как тут, когда сайт пережал изображения и ничего толком не разглядеть.
Внешний процессор: периодически включать, снимать данные «сонара», вЫключать. По графикам процессор сам вполне может принять решение о том, что делать. Итого — да, 87 мА, но не постоянно. ))
По поводу значения самих «87 мА» — это очень неприятное значение для батарейного питания, но сколько потребляет хотя-бы тот-же esp32 при включении радиоблока… ;))
Да, оно небольшое, но если поставить такое в офисе, да на целый день…
Наверное, все-таки не сильно полезно.
HLK-LD2410b — https://aliexpress.ru/item/item/1005004657744635.html
HLK_LD2410c — https://aliexpress.ru/item/item/1005005066016475.html
Много думал :))))
https://aliexpress.ru/item/item/1005004188122757.html
Вот ещё пример, IWR1642:
и вот его цена: https://aliexpress.ru/item/item/1005003493079850.html
DS-PR1-60
DS-PRI120
Подобное есть у всех, уБоша, Дахуа, Аксис…
Или может уже готовые светильники с таким датчким есть? Без всякого bluetooth и прочего мусора.
Ведь его преимущество именно в возможности «тонкой настройки»…
А без всего этого есть, например, модули на основе RCWL-0516 и модули с реле — подключаете и пользуетесь…
«Просто с реле», всё, как заказывали… :))
К тому же вместо этого колхоза с модулями есть готовое решение с реле, регулировкой и подобной работой.
Можно не пользоваться тем, что есть, зная, что при необходимости у тебя есть такая возможность. Но невозможно будет воспользоваться тем, чего попросту нет… :)
А кто не требует?
Вопрос риторический. :)
Диапазон частот. Просто надо понимать, что выбирать для конкретных нужд…
А тот, который с PIR-сенсором не находил, встречал только фотографию платы.
Листья / ветки шатающиеся от ветра он засечет или сигнал насквозь пройдет?
Спросил продавца — уж не датчик ли освещенности это?
— именно так, но распаять распаяли, а в прошивке не реализовали
— есть ли возможность заливать новые прошивки? — не ответил, но уже радует, может допилят.
Из недостатков: нестандартный разъем (еле нашел в местных магазинах и не дешево). Потом поискал на али — там еще дороже.
Разъем торчит вниз, высота получается немаленькой.
Чтобы запихать датчик, например, в плоский профиль для светодиодов — придется отпаивать.
Ну и кушает он сильно побольше чем PIR, батарейное питание — не про него.
Спрашивали по домашним животным — датчик уникален тем, что у него все разделено на несколько зон по 75 см, в каждой чувствительность настраивается по своему.
Можно настроить только 2 первые зоны — получим 1.5 метра, остальным зонам чутье в ноль убираем и крепим на потолок.
В результате все что ниже метра (если потолки 2.5) не вызовет сработку. С любым другим датчиком такой трюк невозможен.
Ну и находил англоязычные проекты, где используется не релейный выход, а чтение сырых данных с ком-порта и обработкой на ESP — там возможностей гораздо больше, но и возни в разы…
Или даже замахнуться на индикатор слепых зон (в углы бампера поставить).
есть ли библиотека для ардуино ( гуру электронщикам не смеяться)?
В данный момент в моем проекте стоит PIR датчик и он отлично работает но портит своим «диско-шаром» переднюю панель. Я так понял логика работы у них плюс минус одинаковая, всмысле выдачи лог сигнала присутствия, поэтому думаю заменить попробовать…
Безопасность зависит от мощности излучения.
Очень хотелось бы знать, как с ними «общаться» напрямую, без приложений…
Он выглядит как светодиод.
Возможно будет работать в новой прошивке.
UPDATE.
Приложение только что обновилось, при возможности попробую обновить прошивку датчика.
И приложение обновленное где?
Приложение предлагает обновится при запуске
У датчика освещённости больше пары выводов… ;)
Спасибо за обзор. Не знал про версию «B». Два уже встроены в Sonoff Touch.
обновился. Но данные сенсора нигде не появляются. Видимо надо ждать обновлений.
На гите нашел клевую прошивку:
github.com/Renstec/LD2410
Я про ld2410b в целом: www.home-assistant.io/integrations/ld2410_ble/
В гите Renstec не вижу прошивок, только либа.
Имелся ввиду пример.
Там наиболее гибкая и удобная настройка всех параметров.
НО для выбор языка привязан к системному, надо выбрать английский по умолчанию в телефоне и приложуха будет на английском
А сейчас прочитал этот интереснейший обзор — респект! И зачем мне дорогие PIR, если можно собрать на дешевом радарном датчике! :-)
Подскажите-ка, плиз, для этого HLK-LD2410b схемку с наименьшими затратами, чтобы собрать такой автовключатель.
Может с реле, а лучше с симистором или с другим исполнительным ключом для включения освещения.
Или может, для этой затеи лучше подходит другая модель радара этого же производителя Hi-Link.
Впаял в интерфейсную плату гребенку под датчик LD2410C (который почти квадратный), подключил сам датчик, а LD2410 Tool говорит «Fail to open device». При этом датчик LD2410 (который длинный) подключается и работает нормально.
но по нему почемуто полная тишина. Как с ним работать?
Кто-нибудь сталкивался, как сбросить (изменить) пароль?