Радиуправляемая машинка Wltoys A979 с камерой и хэдтрекером

- Цена: $58.99
- Перейти в магазин
WLToys A979 – мелкая и довольно шустрая машинка с полным приводом (коллекторный мотор, но литий-полимерный аккумулятор), просто так на ней кататься довольно быстро надоедает (по крайней мере мне).
Сделаем из нее FPV машину с поворотной камерой и хэдтрекером (для отслеживания поворота головы). Осторожно, очень много картинок и подробностей.
Делать очередной обзор хорошо известной модели скучно, поэтому обзор будет касаться в основном FPV оборудования.

Упаковка

Комплектация: машинка, ключ, зарядное устройство, аккумулятор, пульт управления (без батареек, нужно 4 штуки типа АА).

Аккумулятор литий-полимерный, 1100 мА*ч, две банки (7,4В).

В руках будет пульт управления, а на голове шлем.
Чтобы было интереснее решил сделать двухосевой подвес для камеры и хэдтрекер.
У меня шлем Eachine VR D2, у него нет встроенного хэдтрекера. Поэтому сделал его сам (ничего паять не пришлось :) ).
Есть отличный проект: DIY Headtracker
Собирается очень просто, настраивается еще проще, отлично работает, много инструкций как на русском, так и на английском. Я не захотел ждать пока придется плата GY-85, поэтому покопался в закромах и нашел старый полетный контроллер Crius MultiWii SE v 1.0. Это по сути Arduino Pro Mini с кучей датчиков. Единственная проблема в том, что DIY Headtracker работает с акселерометром ADXL345, а на моей плате BMA180. Нашел даташиты на BMA180 и примеры его использования.
Теперь DIY Headtracker можно использовать и с другими платами, на которых установлен BMA180.
Исходники разместил тут.
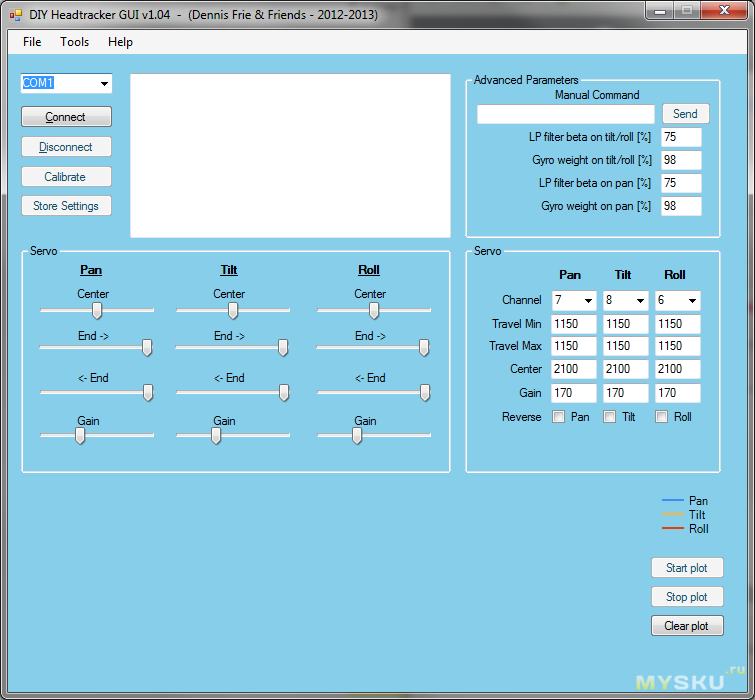
Вот хорошая статья про сборку хэдтрекера на русском языке. После сборки трекера, подключаем его к компьютеру и настраиваем (ход сервомашинок, номера каналов, реверс и т.д).
Нарисовал и распечатал простую коробку – корпус трекера. Модель можно скачать отсюда. Корпус должен подойти и для других полетных контроллеров с расстоянием между монтажными отверстиями 35 мм.
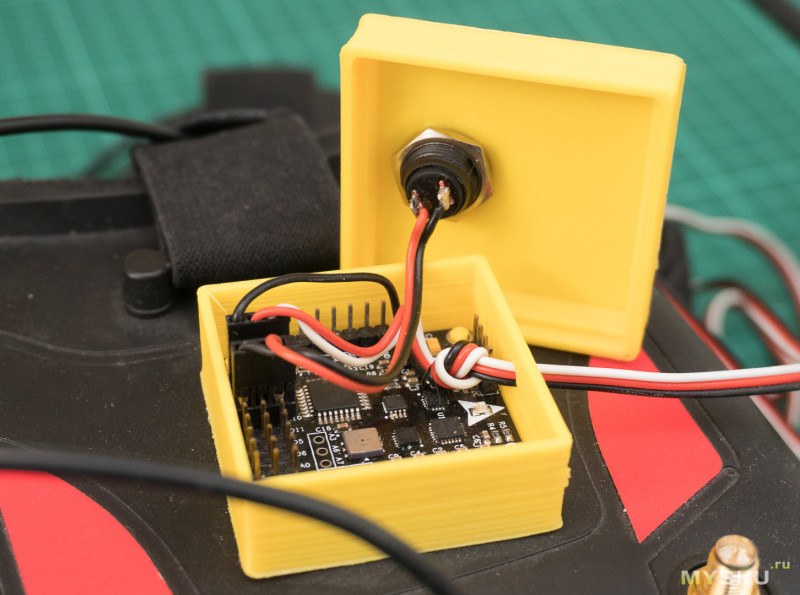
Собираем коробку, крышка закрывается довольно плотно и держится за счет трения.
Хэдтрекер подразумевает использование кнопки для сброса положения головы «в нейтраль», расположил её на крышке (все-таки пришлось припаять два проводка).
Следующая задача – как-то передать сигнал на машинку. Комплектная аппаратура управления не имеет тренерского разъема, пришлось опять покопаться в закромах.
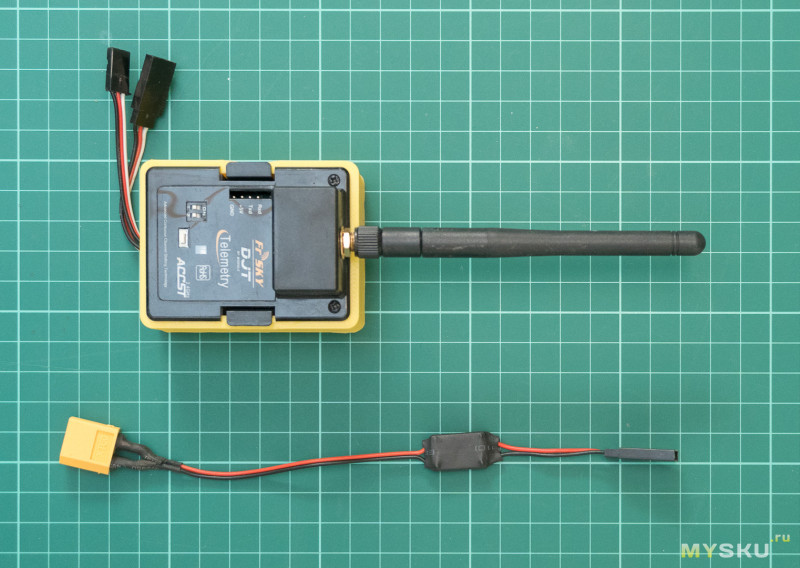
От старой Turnigy у меня имеется радиомодуль FrSky DJT, он староват, поддерживает только протокол D8 и его нельзя использовать с новыми приемниками X-серии, но для текущих задач он отлично подходит.

Еще раз открываем sketchup, чертим небольшую коробочку для радиомодуля. Выложил её вот сюда.

Этот бокс имеет стандартные размеры модуля расширения типа JR, так что его можно использовать и с другими модулями, не только DJT.
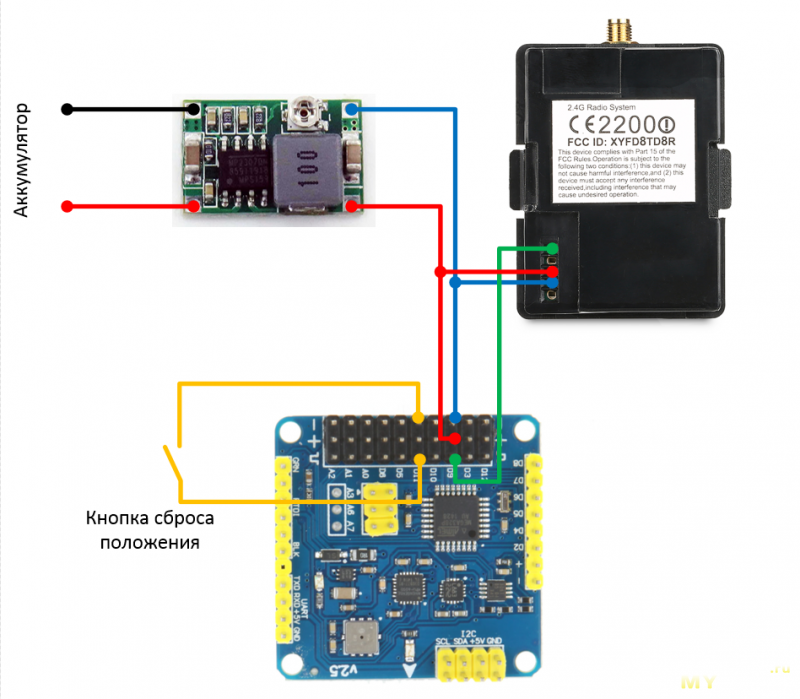
Выходной сигнал хэдтрекера – это просто сигнал PPM, на входе DJT – тоже PPM, в общем просто их соединяем проводами. Остается добавить питание от аккумулятора (нужно 5 вольт), для этого берем мелкий DC-DC преобразователь (на фото выше, он внизу по центру, затянут в термоусадку)
Распиновка контактов модуля DJT:
По порядку, сверху вниз (от антенны): PPM, NC, VCC, GND, NC
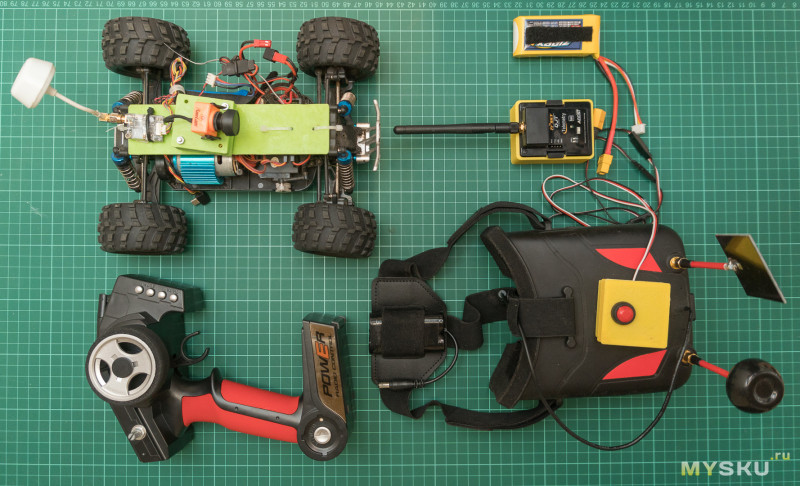
Соединяем все вместе для проверки (соединения между «блоками» сделал разъемными, на обычных серворазъемах), питание с любого двух или трехбаночного литиевого аккумулятора с разъемом XT60:

В качестве приемника сигнала в закромах родины нашелся приемник

Он восьмиканальный, работает с модулем DJT, выходы PWM. Берем еще один преобразователь напряжения, выставляем 5 вольт, одеваем в термоусадку.
Чтобы не возиться с двумя камерами (как на коптерах – одна курсовая, другая для HD записи), взял Runcam Split (те, кто решил брать, учтите, что уже есть вторая версия и mini-версия), снова открываем скетчап и рисуем корпус для основной платы, крепеж к подвесу и крепеж для модуля с матрицей и объективом.
Файлы тут.

Не стал трогать комплектную корку машинки, решил заменить штатное крепление. Еще раз открываем sketchup, чертим, печатаем. Все модели по ссылке выше.
После легкой обработки напильником собираем все части воедино.
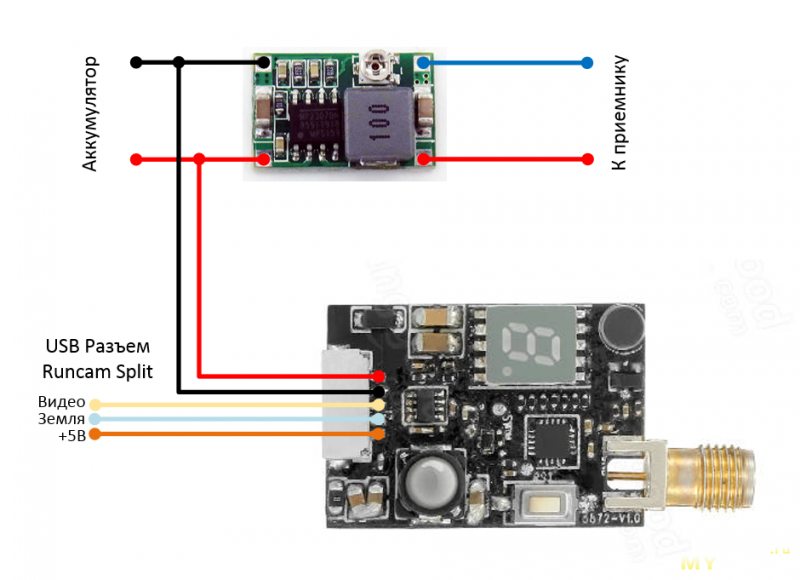
Делаем отвод питания от основного аккумулятора, стаб на 5 В будет питать приемник и сервы, видеопередатчик напрямую от аккумулятора, камера от стабилизатора в видеопередатчике. Соединяем кучу разъемов, стягиваем провода. Смотрим на то что получилось.

Немного покатался выявил несколько недостатков:
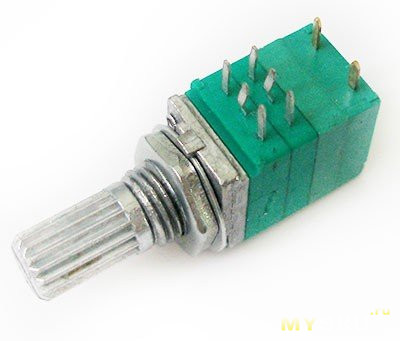
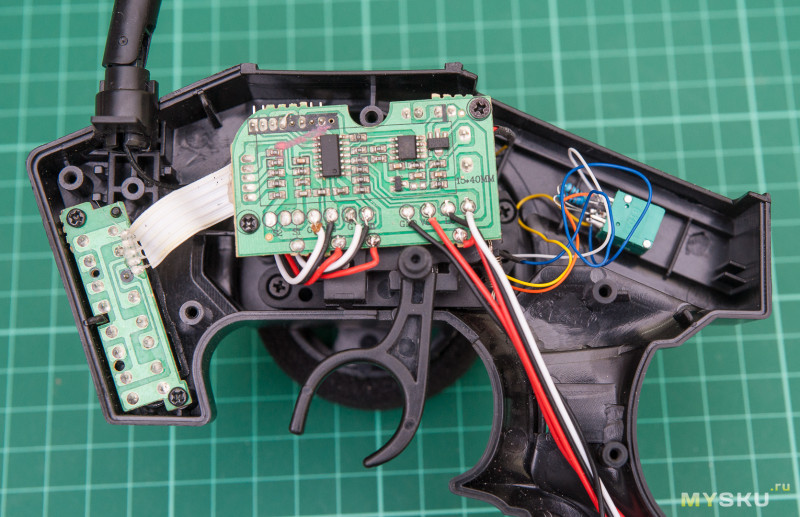
Штатный курок – это просто переменный разистор.
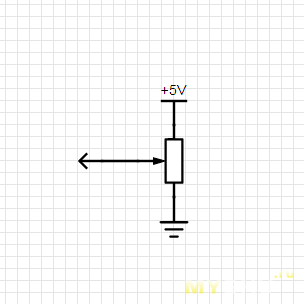
Подключаем сдвоенный резистор, так, чтобы одновременно менять сопротивление верхнего и нижнего плеча. Вот схема соединения.
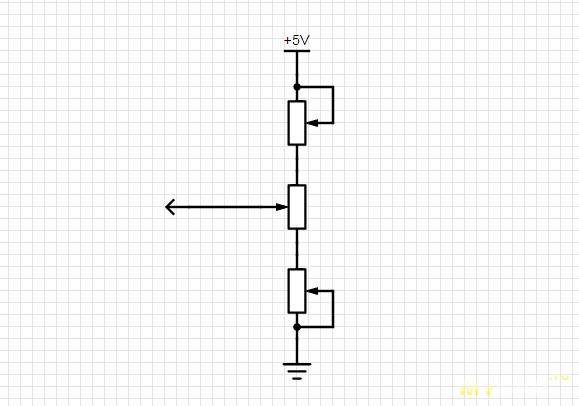
Сходил в радиомагазин взял вот такой резистор, чем больше сопротивление дополнительного резистора, тем сильнее сможем ограничить расходы. 5-20 кОм хватит за глаза. 20 кОм – это довольно много, небольшое вращения, очень сильно меняет расходы.
Чтобы несколько снизить сопротивление переменного резистора, параллельно ему припаял резисторы на 4,7 и 6,8 кОм (пришлось поставить разные, чтобы легче было триммировать газ). Теперь все стало очень удобно – крайнее положение резистора – машинка катается без ограничений, если провернуть почти до конца, то полного газа хватает только чтобы машинка еле ехала.
Очередной выход на улицу показал, регулировка расходов резистором (на нормальных аппах есть крутилки, а не только тумблеры) – это очень удобно; захотел — сделал тихоход, выехал на асфальт – втопил. Еще один недостаток – сервы HXT900 слабенькие, с пластиковым редуктором, да и подвес не сильно продуманный, поэтому камера хорошо так болтается по вертикали. Езда даже по небольшим неровностям – сплошное мучение, очень сложно ориентироваться. Решил убрать одну серву, тем более, что оказалось задирать голову и смотреть вверх как бы и не очень надо.

Т.к. в новом варианте камера получается несколько ниже – переместил её вперед, и заменил крепление на штатную скобу от камеры.

Заряжаемся и идем кататься. Всё стало значительно интереснее. По стриженному газону машинка отлично идет; в высокой траве, да на кочках все же застревает (маловата машинка!). Хотя выкручивание расходов на максимум очень часто позволяет «выпрыгнуть» — колеса раскручиваются и раздуваются (клиренс заметно увеличивается), при этом цепляя землю.
До этого по FPV летал на самолетах/коптерах и даже не думал, что ползать по земле тоже интересно.
Крутить головой (и камерой) по сторонам полезно, вверх-вниз – не особо и надо, тем более что, у Runcam Split довольно большой FOV.
Машинку я получил для обзора, так что п. 18; все остальное оборудование: камеру, видеопередатчик, шлем, хэдтрекер и т.д. приобрел на свои собственные.
Ну и напоследок небольшое видео.
Сделаем из нее FPV машину с поворотной камерой и хэдтрекером (для отслеживания поворота головы). Осторожно, очень много картинок и подробностей.
Делать очередной обзор хорошо известной модели скучно, поэтому обзор будет касаться в основном FPV оборудования.
Распаковка
Чтобы не повторять кучу других обзоров этой серии машинок (раз и два), просто приведу пару фотографий.Упаковка
Комплектация: машинка, ключ, зарядное устройство, аккумулятор, пульт управления (без батареек, нужно 4 штуки типа АА).
Аккумулятор литий-полимерный, 1100 мА*ч, две банки (7,4В).
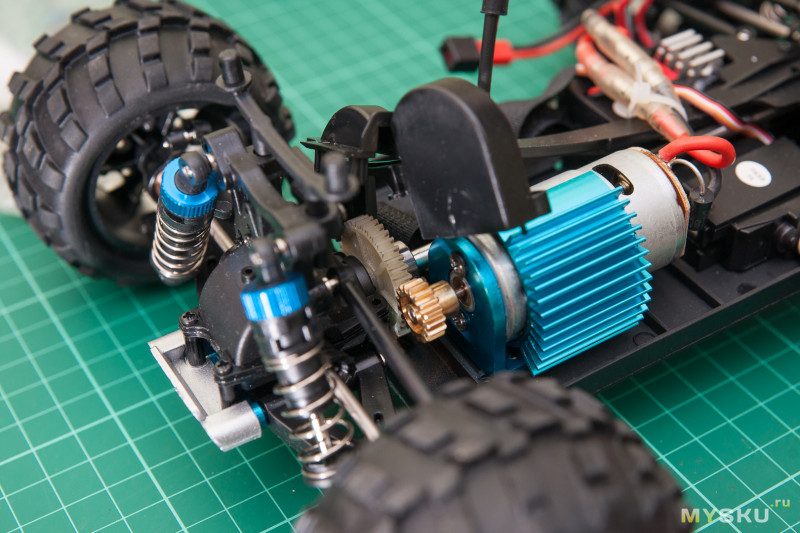
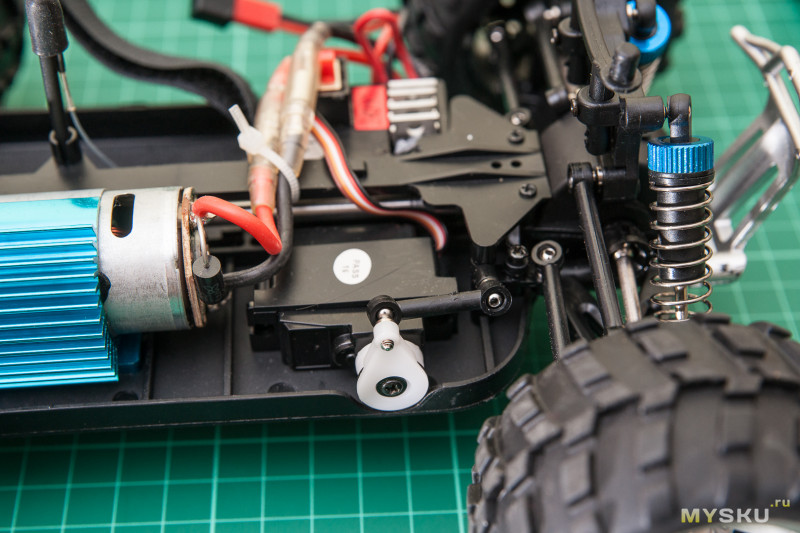
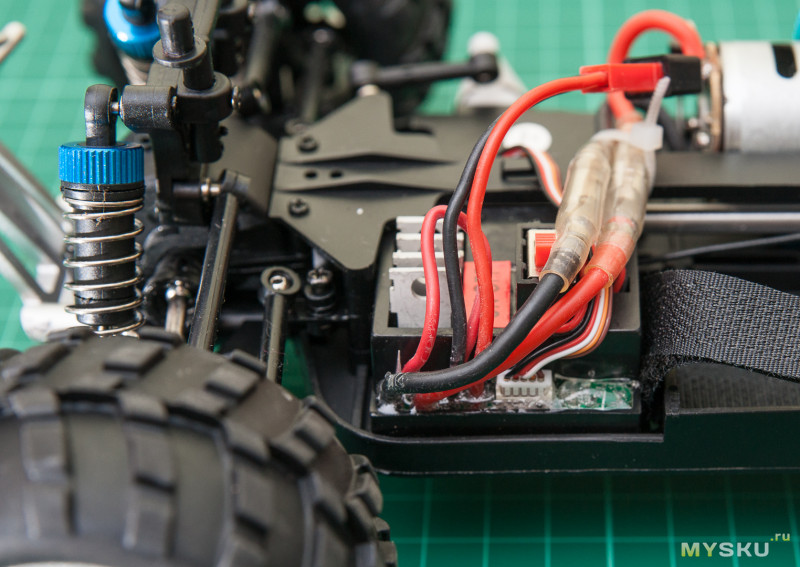
Несколько фотографий крупным планом: двигатель и шестерни, электроника, залитая компаундом, серва для руления.
FPV
FPV – First Person View или вид от первого лица. Что для этого нужно? На машинку нужно поставить камеру для записи видео и видеопередатчик для трансляции этого видео.В руках будет пульт управления, а на голове шлем.
Чтобы было интереснее решил сделать двухосевой подвес для камеры и хэдтрекер.
Делаем Head Tracker
Head Tracker – отслеживает наклоны головы и передает эти данные куда-то еще, в нашем случае на машинку, чтобы поворачивать камеру.У меня шлем Eachine VR D2, у него нет встроенного хэдтрекера. Поэтому сделал его сам (ничего паять не пришлось :) ).
Есть отличный проект: DIY Headtracker
Собирается очень просто, настраивается еще проще, отлично работает, много инструкций как на русском, так и на английском. Я не захотел ждать пока придется плата GY-85, поэтому покопался в закромах и нашел старый полетный контроллер Crius MultiWii SE v 1.0. Это по сути Arduino Pro Mini с кучей датчиков. Единственная проблема в том, что DIY Headtracker работает с акселерометром ADXL345, а на моей плате BMA180. Нашел даташиты на BMA180 и примеры его использования.
Теперь DIY Headtracker можно использовать и с другими платами, на которых установлен BMA180.
Исходники разместил тут.
Вот хорошая статья про сборку хэдтрекера на русском языке. После сборки трекера, подключаем его к компьютеру и настраиваем (ход сервомашинок, номера каналов, реверс и т.д).
Нарисовал и распечатал простую коробку – корпус трекера. Модель можно скачать отсюда. Корпус должен подойти и для других полетных контроллеров с расстоянием между монтажными отверстиями 35 мм.
Собираем коробку, крышка закрывается довольно плотно и держится за счет трения.
Хэдтрекер подразумевает использование кнопки для сброса положения головы «в нейтраль», расположил её на крышке (все-таки пришлось припаять два проводка).
Следующая задача – как-то передать сигнал на машинку. Комплектная аппаратура управления не имеет тренерского разъема, пришлось опять покопаться в закромах.
От старой Turnigy у меня имеется радиомодуль FrSky DJT, он староват, поддерживает только протокол D8 и его нельзя использовать с новыми приемниками X-серии, но для текущих задач он отлично подходит.
Еще раз открываем sketchup, чертим небольшую коробочку для радиомодуля. Выложил её вот сюда.
Этот бокс имеет стандартные размеры модуля расширения типа JR, так что его можно использовать и с другими модулями, не только DJT.
Выходной сигнал хэдтрекера – это просто сигнал PPM, на входе DJT – тоже PPM, в общем просто их соединяем проводами. Остается добавить питание от аккумулятора (нужно 5 вольт), для этого берем мелкий DC-DC преобразователь (на фото выше, он внизу по центру, затянут в термоусадку)
Распиновка контактов модуля DJT:
По порядку, сверху вниз (от антенны): PPM, NC, VCC, GND, NC
Соединяем все вместе для проверки (соединения между «блоками» сделал разъемными, на обычных серворазъемах), питание с любого двух или трехбаночного литиевого аккумулятора с разъемом XT60:
Поворотное крепление для камеры
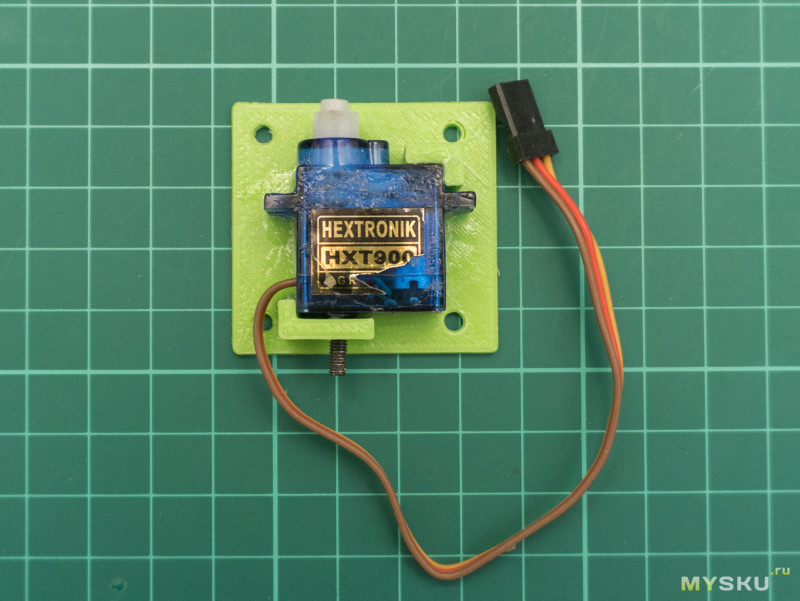
Первая версия. Поворот по двум осям или Pan/Tilt подвес. Нам нужно поворачивать камеру влево-вправо – pan, и наклонять её – tilt, берем две сервомашинки, в моем случае – народные HXT900.В качестве приемника сигнала в закромах родины нашелся приемник
Он восьмиканальный, работает с модулем DJT, выходы PWM. Берем еще один преобразователь напряжения, выставляем 5 вольт, одеваем в термоусадку.
Чтобы не возиться с двумя камерами (как на коптерах – одна курсовая, другая для HD записи), взял Runcam Split (те, кто решил брать, учтите, что уже есть вторая версия и mini-версия), снова открываем скетчап и рисуем корпус для основной платы, крепеж к подвесу и крепеж для модуля с матрицей и объективом.
Файлы тут.
Не стал трогать комплектную корку машинки, решил заменить штатное крепление. Еще раз открываем sketchup, чертим, печатаем. Все модели по ссылке выше.
После легкой обработки напильником собираем все части воедино.
Делаем отвод питания от основного аккумулятора, стаб на 5 В будет питать приемник и сервы, видеопередатчик напрямую от аккумулятора, камера от стабилизатора в видеопередатчике. Соединяем кучу разъемов, стягиваем провода. Смотрим на то что получилось.
Немного покатался выявил несколько недостатков:
- рабочий ход курка газа оказался очень маленьким, чуть двинешь – машина очень резко стартует (на самом деле со стороны не кажется, что быстро, а вот по FPV все выглядит по-другому)
- первый же переворот «через голову» свернул пластиковые шестерни в редукторе машинки, которая ворочает камерой по вертикали (просто тупо заменил серву)
Ограничиваем расходы
Как я уже писал, WL 979 – гоночная машинка, а не краулер, легким движением курка её можно разогнать до неприлично высоких скоростей, управлять неудобно, а ограничить расходы (в данном случае макс. значение газа) аппаратура не позволяет.Штатный курок – это просто переменный разистор.
Подключаем сдвоенный резистор, так, чтобы одновременно менять сопротивление верхнего и нижнего плеча. Вот схема соединения.
Сходил в радиомагазин взял вот такой резистор, чем больше сопротивление дополнительного резистора, тем сильнее сможем ограничить расходы. 5-20 кОм хватит за глаза. 20 кОм – это довольно много, небольшое вращения, очень сильно меняет расходы.
Чтобы несколько снизить сопротивление переменного резистора, параллельно ему припаял резисторы на 4,7 и 6,8 кОм (пришлось поставить разные, чтобы легче было триммировать газ). Теперь все стало очень удобно – крайнее положение резистора – машинка катается без ограничений, если провернуть почти до конца, то полного газа хватает только чтобы машинка еле ехала.
Очередной выход на улицу показал, регулировка расходов резистором (на нормальных аппах есть крутилки, а не только тумблеры) – это очень удобно; захотел — сделал тихоход, выехал на асфальт – втопил. Еще один недостаток – сервы HXT900 слабенькие, с пластиковым редуктором, да и подвес не сильно продуманный, поэтому камера хорошо так болтается по вертикали. Езда даже по небольшим неровностям – сплошное мучение, очень сложно ориентироваться. Решил убрать одну серву, тем более, что оказалось задирать голову и смотреть вверх как бы и не очень надо.
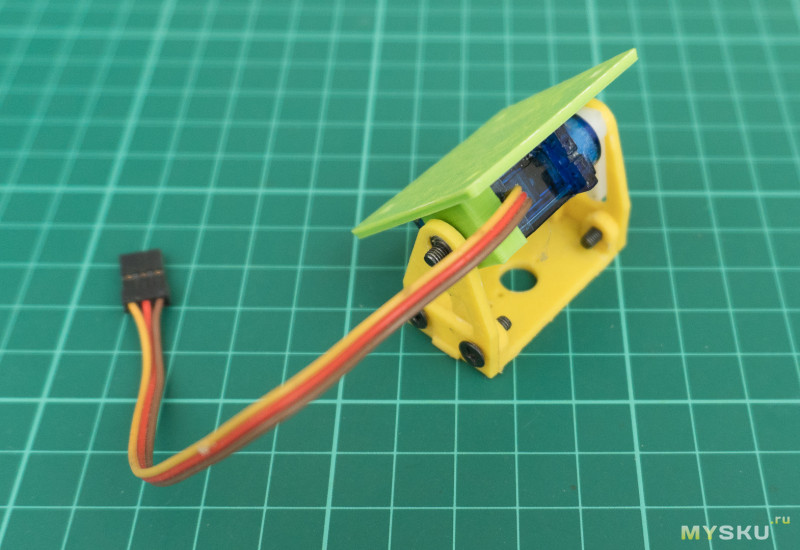
Вторая версия подвеса камеры
Опять беремся за sketchup, правим подвес, печатаем, меняем серву на Corona CS-939MG с металлическим редуктором.Т.к. в новом варианте камера получается несколько ниже – переместил её вперед, и заменил крепление на штатную скобу от камеры.
Заряжаемся и идем кататься. Всё стало значительно интереснее. По стриженному газону машинка отлично идет; в высокой траве, да на кочках все же застревает (маловата машинка!). Хотя выкручивание расходов на максимум очень часто позволяет «выпрыгнуть» — колеса раскручиваются и раздуваются (клиренс заметно увеличивается), при этом цепляя землю.
Заключение, выводы
Заменить двигатель, либо редуктор т.к. при малых расходах бывает что не хватает крутящего момента и напечатать защиту камеры.До этого по FPV летал на самолетах/коптерах и даже не думал, что ползать по земле тоже интересно.
Крутить головой (и камерой) по сторонам полезно, вверх-вниз – не особо и надо, тем более что, у Runcam Split довольно большой FOV.
Машинку я получил для обзора, так что п. 18; все остальное оборудование: камеру, видеопередатчик, шлем, хэдтрекер и т.д. приобрел на свои собственные.
Ну и напоследок небольшое видео.
Самые обсуждаемые обзоры
| +79 |
4324
149
|
| +85 |
3199
84
|
| +212 |
3664
35
|
При всем этом автор молодец, и руки из правильного места и читать увлекательно.
Хотя есть конечно мысль сделать стабилизированный подвес.
А так по гладкой поверхности и на машинках приятно от первого лица погонять — в зависимости от объектива скорость может казаться выше чем есть на самом деле и ощущение, что управляешь гоночным болидом )
Очень заинтересовала возможность покататься с FPV возьму на заметку.
Пару ссылок если можно )
Серву возьму из того что есть, как вариант, такую же, как стоит на подвесе Corona CS-939MG
Приемник уже установлен и пока служит только для поворота камеры. Если подключить нормальную аппу, тогда отдельный передатчик для трекера не понадобится, его можно будет подключить в тренерский разъем аппаратуры управления. Т.е. конструкция упрощается.
Странно что такой неплохой обзор набрал так мало просмотров, плюсов и комментов.
Думаю те, кому действительно было интересно уже посмотрели.