Как собрать мелкий коптер на БК моторах?

- Цена: 103
- Перейти в магазин
250ка
Уже больше года занимаюсь RC моделями, много часов налетал на игрушках и не меньше на серьёзном коптере: 450ке.
Загорелся желанием построить ''малыша'' для быстрых полётов
Забегая вперед покажу их в сравнении


Постараюсь писать понятным всем языком.
Итак, приступим.
Что нужно для сборки?
Основные компоненты:
1) Рама ( основа всего)
2) Контроллер полёта ( мозги)
3) ВМГ ( винтомоторная группа)
* БК мотор
*регулятор оборотов для БК мотора
* пропеллер
Инструмент:
* универсальный набор отверток
* паяльник
Множество мелких вспомогательных компонентов.







Оцениваем фронт работ

Собираем раму(сильно не закручивать, делаем это для примерки)

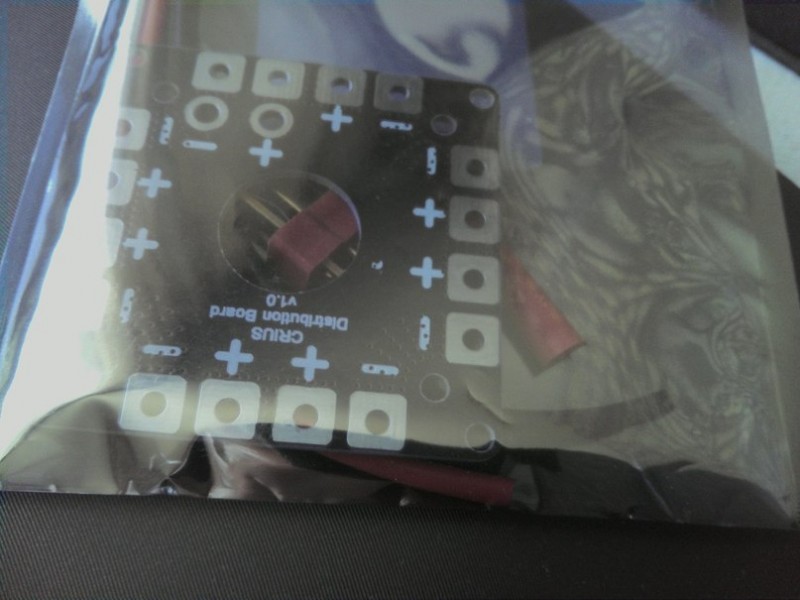
Размещаем плату
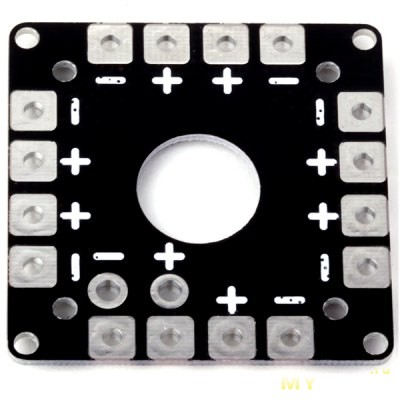
между несущими пластинами, т.к места внутри рамы маловато.
Примерно определяем расположение

и необходимую длину проводов: она оказалась достаточной.
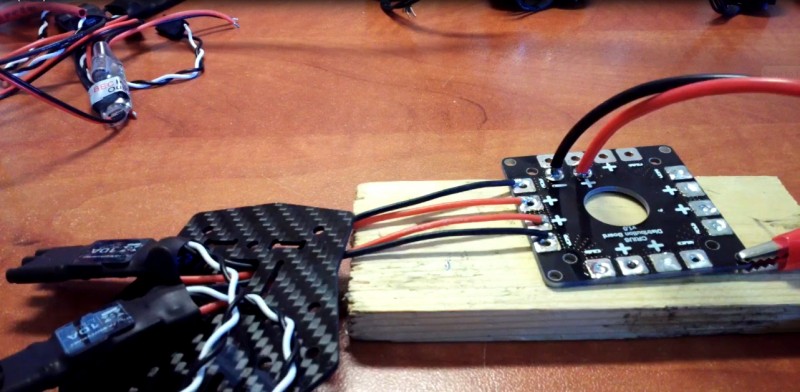
Проводим провода питания регуляторов.

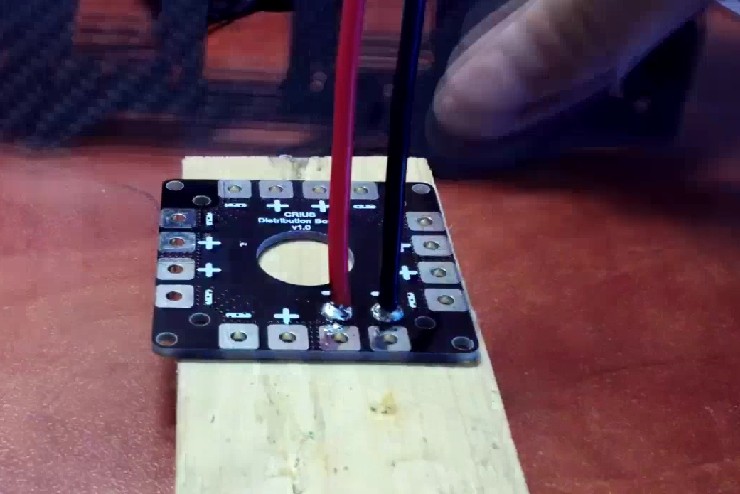
Начинаем пайку!
Впаиваем входное питание для платы
Припаиваем питание регуляторов.
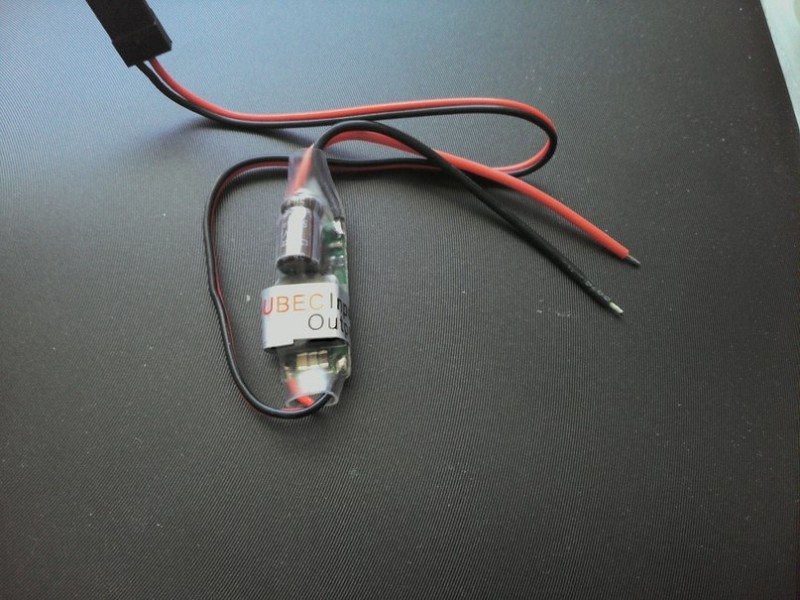
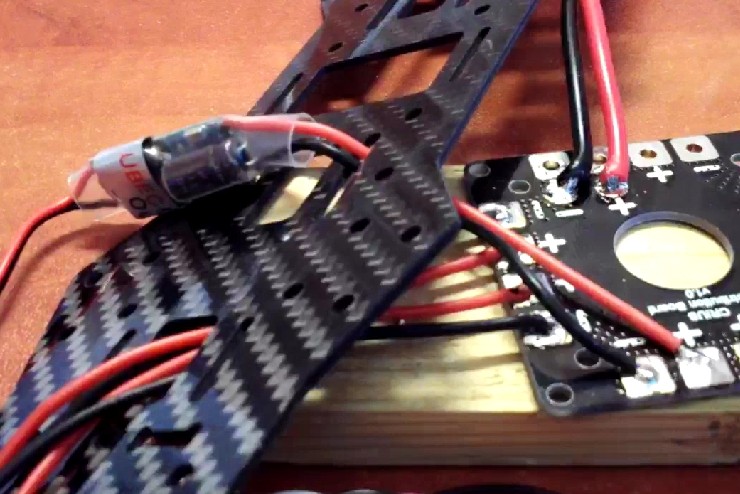
Добавляем убек( для питания мозгов и приёмника)
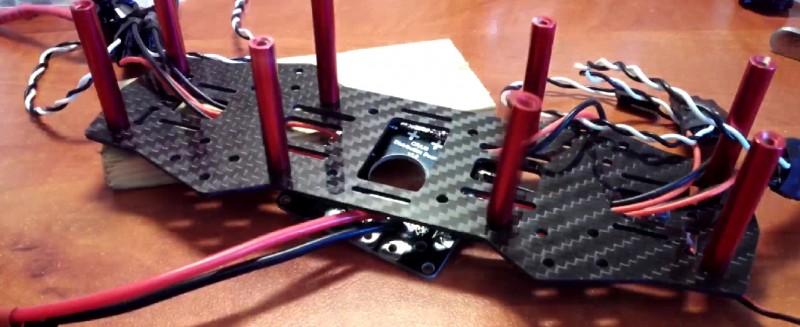
Монтируем стойки.
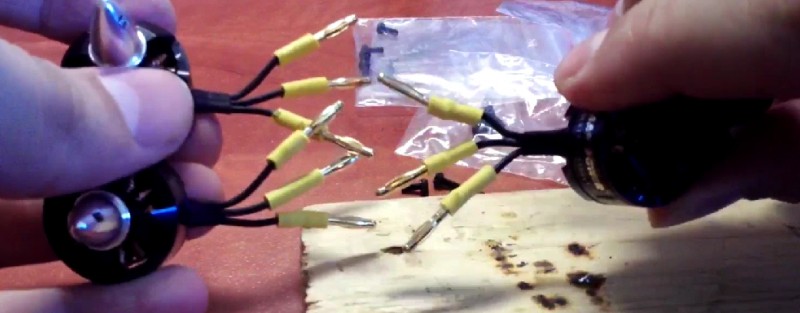
Обрезаем лишнюю длину проводов от моторов, напаиваем коннектор 2мм папа, аккуратно закрываем термоусадкой(использовал 4мм)
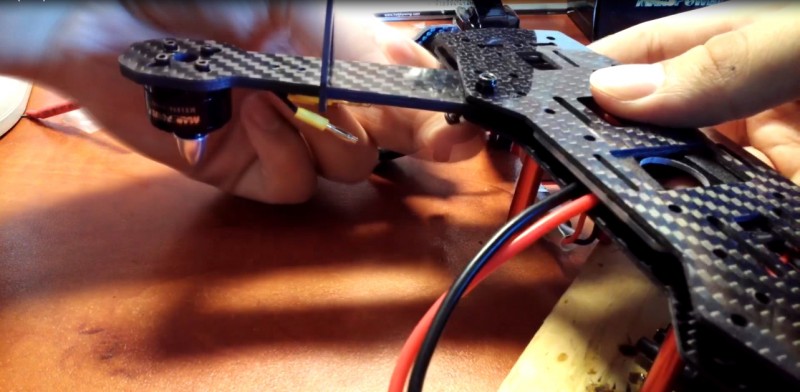
Монтируем мотор на луч.

Собираем нижнюю часть рамы: устанавливаем лучи, закрепляем между собой несущие пластины.
В комплекте находятся самоконтрящиеся гайки(не открутятся)
*Обращаю внимание: моторы направленного вращения с самоконтрящейся гайкой; темные- левый передний и правый задний, светлые- наоборот.
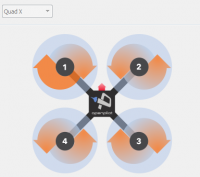
Порядок подключения к регуляторам
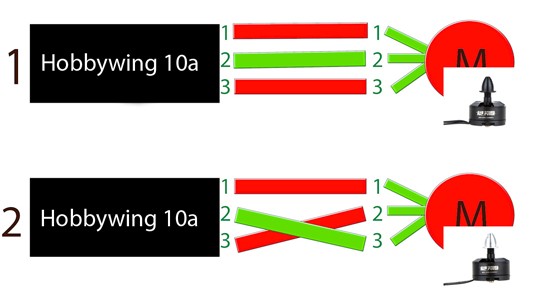
Таким образом получаем нужное направление вращения.
Прикрепляем регуляторы к лучу с помощью двойного скотча и нейлоновой стяжки.
Выглядит не плохо.
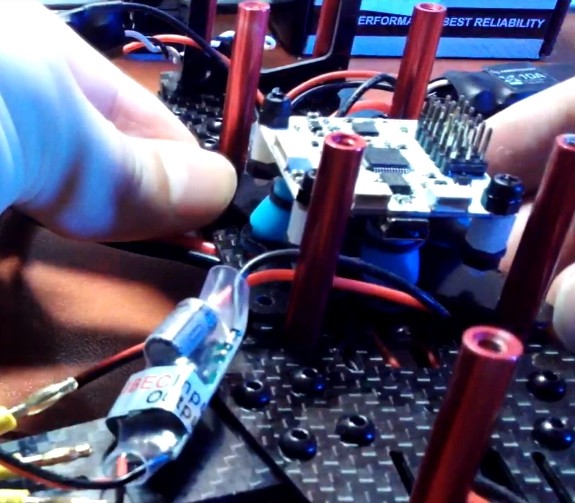
Собираем демпферную площадку и устанавливаем на нее контроллер полёта.

Время установить мозг на его место. Ориентируемся на стрелку, она должна указывать вперед.
Укладываем Убэк
Устанавливаем приёмник.

Подключаем Убек к приёмнику в разъём для батареи. ( 5v)
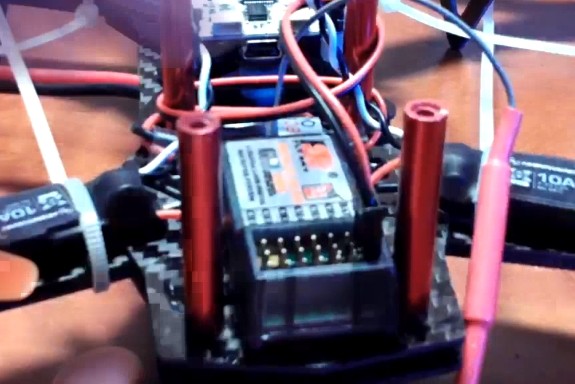
Подключаем регуляторы к мозгу по схеме
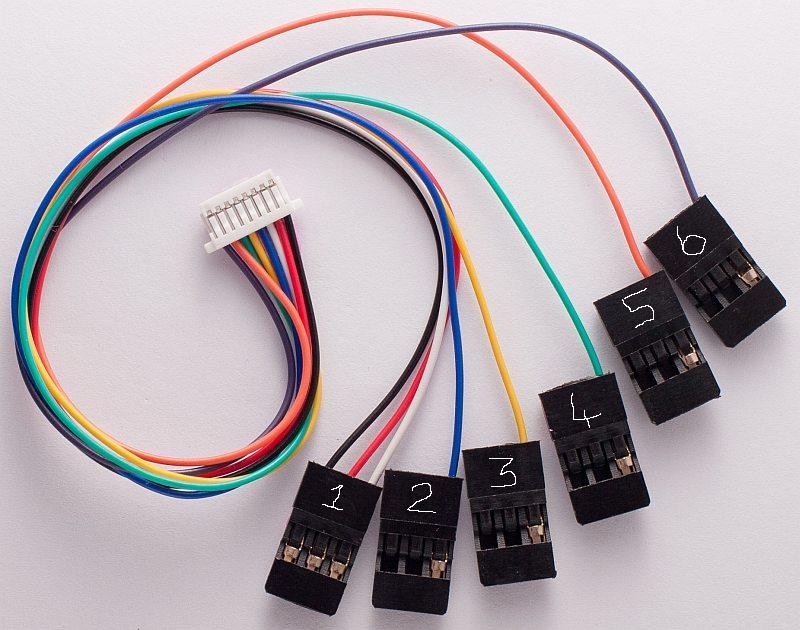
Подключаем комплектный кабель от мозга к приёмнику(может отличаться, суть не меняется)
Одержим во внимании что, минус всегда снаружи.
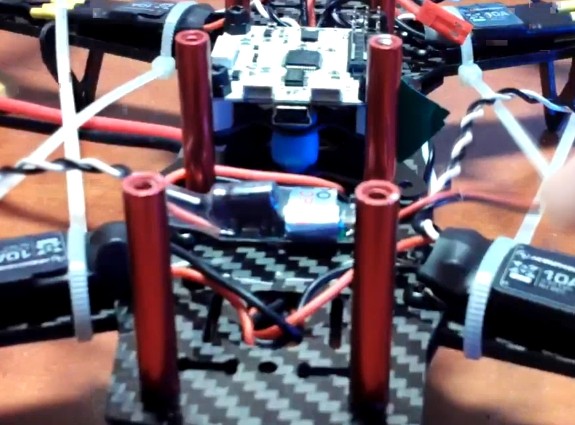
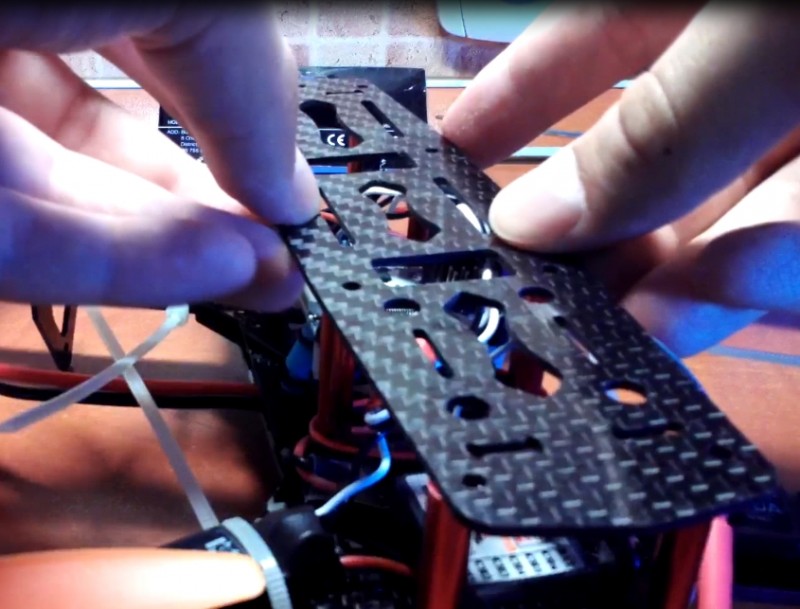
Устанавливаем верхнюю пластину.
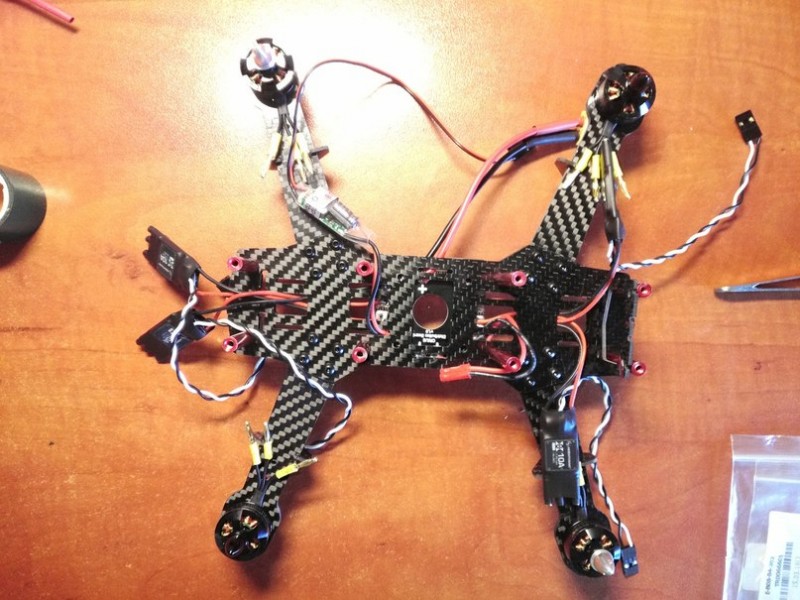
Квадрик почти готов.

Так выглядит на данный момент после всех улучшений



ТТХ моторов ( 2280kv)
Все манипуляции с коптером производите без пропеллеров. На полном газу мотор делает почти 500 оборотоd в секунду(3s). Берегите свое здоровье и окружающих людей.
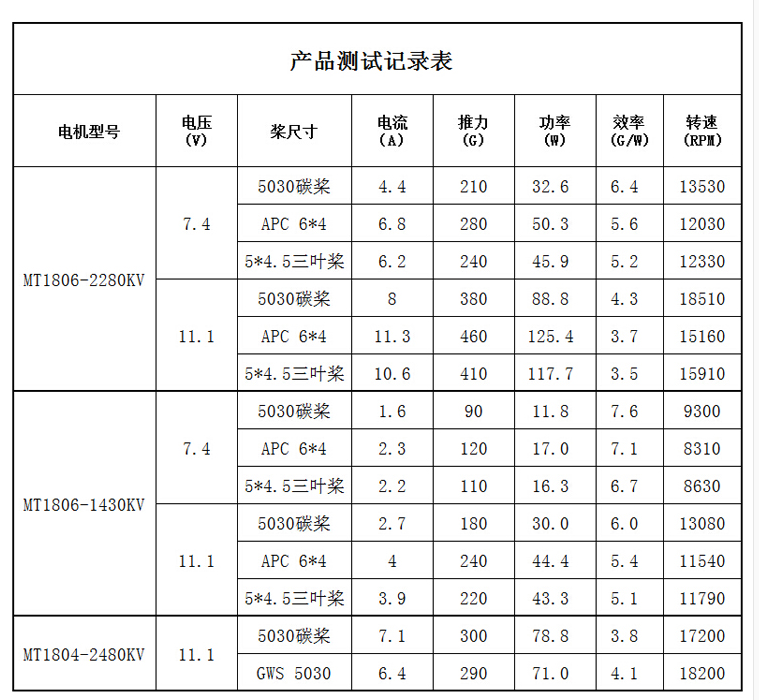
Расчетная тяга моторов 1600гр(3s)
Вес коптера без батареи 430гр ( установлено фпв)
Вес с батарей 603гр ( при установке аналога GoPro + 73 гр )
Описание установки FPV и настройки мозга постараюсь выложить одним обзором немного позже, при условии наличия желающих.
Видео вариант сборки
Первый полёт
Летает на 2200мах 10мин(медленные полёты с камерой)
Подведу итог: 250й класс заслуживает внимания, но начинать с него не советую. Даже мне, сносно управляющему 450кой, сложно удерживать квадрик. Если новичок решается на 250ку, то советую ставить мозги с автопилотом и GPS.
Спасибо за внимание, всем хорошего дня.
С вами был

P.S наборчик немного изменился, отличие в том, что нужно будет убрать красный(средний) провод из фишки.
Использование встроенного БЕК в регуляторе повышает его нагрев и риск выхода из строя.
Буду рад ответить на ваши вопросы.
Если надумали собрать БПЛА пишите в ЛС vk.com/konstantin_molyavin
Уже больше года занимаюсь RC моделями, много часов налетал на игрушках и не меньше на серьёзном коптере: 450ке.
Загорелся желанием построить ''малыша'' для быстрых полётов
Забегая вперед покажу их в сравнении
Постараюсь писать понятным всем языком.
Итак, приступим.
Что нужно для сборки?
Основные компоненты:
1) Рама ( основа всего)
2) Контроллер полёта ( мозги)
3) ВМГ ( винтомоторная группа)
* БК мотор
*регулятор оборотов для БК мотора
* пропеллер
Инструмент:
* универсальный набор отверток
* паяльник
Множество мелких вспомогательных компонентов.
Фото необходимого из посылки
Оцениваем фронт работ
Собираем раму(сильно не закручивать, делаем это для примерки)
Размещаем плату
разводки питания
Примерно определяем расположение
регуляторов
Проводим провода питания регуляторов.
Начинаем пайку!
Впаиваем входное питание для платы
Припаиваем питание регуляторов.
Добавляем убек( для питания мозгов и приёмника)
Монтируем стойки.
Обрезаем лишнюю длину проводов от моторов, напаиваем коннектор 2мм папа, аккуратно закрываем термоусадкой(использовал 4мм)
Монтируем мотор на луч.
Собираем нижнюю часть рамы: устанавливаем лучи, закрепляем между собой несущие пластины.
В комплекте находятся самоконтрящиеся гайки(не открутятся)
*Обращаю внимание: моторы направленного вращения с самоконтрящейся гайкой; темные- левый передний и правый задний, светлые- наоборот.
Порядок подключения к регуляторам
Таким образом получаем нужное направление вращения.
Прикрепляем регуляторы к лучу с помощью двойного скотча и нейлоновой стяжки.
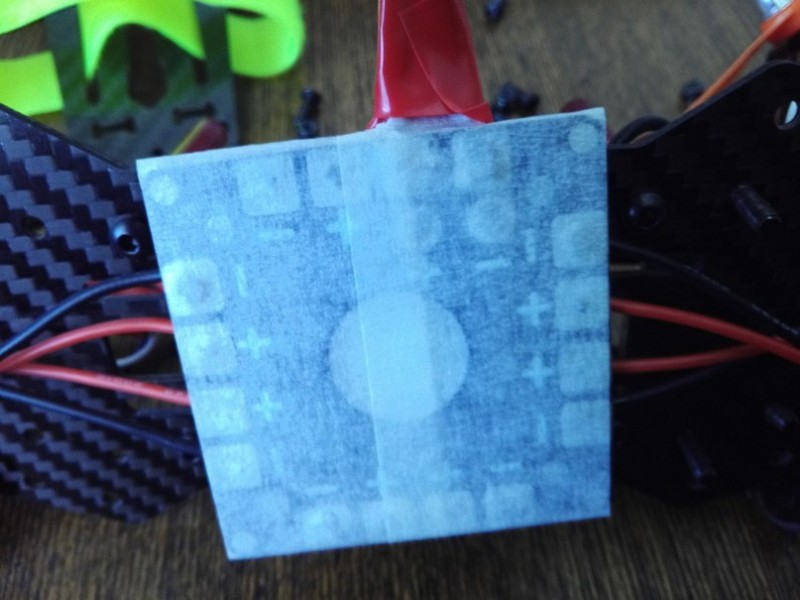
ВНИМАНИЕ!!!!
Карбон проводит электрический ток. Нужно изолировать платку от контакта с карбоном. Промазал лаком для ногтей пайку, закрыл сверху малярным скотчем.
Выглядит не плохо.
Собираем демпферную площадку и устанавливаем на нее контроллер полёта.
Время установить мозг на его место. Ориентируемся на стрелку, она должна указывать вперед.
Укладываем Убэк
Устанавливаем приёмник.
Подключаем Убек к приёмнику в разъём для батареи. ( 5v)
Подключаем регуляторы к мозгу по схеме
Подключаем комплектный кабель от мозга к приёмнику(может отличаться, суть не меняется)
Одержим во внимании что, минус всегда снаружи.
Устанавливаем верхнюю пластину.
Квадрик почти готов.
Так выглядит на данный момент после всех улучшений
mini FAQ (собрал основные вопросы)
* ОН как то стабилизируется?
Ответ: ДА, стоит простая система стабилизации с выбором нескольких режимов полёта.
* Он может зависать в точке?
Ответ: НЕТ, для зависания в точке нужен GPS модуль.
* Можно к нему подключить GPS?
Ответ: ДА. Сложно, но можно.( требуется не родная прошивка)
* Может ли ОН вернуться в точку взлета?
Ответ: НЕТ, нужет GPS.
* Может ли Он удерживать высоту?
Ответ: НЕТ, отсутствует бародатчик.
* ОН потянет GoPro и ей подобные камеры?
Ответ: ДА.
* Можно на него прикрепить БК подвес?
Ответ: можно, но не стоит. Задачи не те.
* Для увеличения продолжительности можно использовать батарею 3000мах?
Ответ: Формально нет. Предельный объём батареи 2200мах. Проще сесть и сменить аккум. Дальнейшее увеличение ёмкости снижает эффективность батареи,
* Какая дальность полёта?
Ответ: Больше прямой видимости.
Ответ: ДА, стоит простая система стабилизации с выбором нескольких режимов полёта.
* Он может зависать в точке?
Ответ: НЕТ, для зависания в точке нужен GPS модуль.
* Можно к нему подключить GPS?
Ответ: ДА. Сложно, но можно.( требуется не родная прошивка)
* Может ли ОН вернуться в точку взлета?
Ответ: НЕТ, нужет GPS.
* Может ли Он удерживать высоту?
Ответ: НЕТ, отсутствует бародатчик.
* ОН потянет GoPro и ей подобные камеры?
Ответ: ДА.
* Можно на него прикрепить БК подвес?
Ответ: можно, но не стоит. Задачи не те.
* Для увеличения продолжительности можно использовать батарею 3000мах?
Ответ: Формально нет. Предельный объём батареи 2200мах. Проще сесть и сменить аккум. Дальнейшее увеличение ёмкости снижает эффективность батареи,
* Какая дальность полёта?
Ответ: Больше прямой видимости.
ТТХ моторов ( 2280kv)
Все манипуляции с коптером производите без пропеллеров. На полном газу мотор делает почти 500 оборотоd в секунду(3s). Берегите свое здоровье и окружающих людей.
Расчетная тяга моторов 1600гр(3s)
Вес коптера без батареи 430гр ( установлено фпв)
Вес с батарей 603гр ( при установке аналога GoPro + 73 гр )
Описание установки FPV и настройки мозга постараюсь выложить одним обзором немного позже, при условии наличия желающих.
Видео вариант сборки
Первый полёт
Летает на 2200мах 10мин(медленные полёты с камерой)
Подведу итог: 250й класс заслуживает внимания, но начинать с него не советую. Даже мне, сносно управляющему 450кой, сложно удерживать квадрик. Если новичок решается на 250ку, то советую ставить мозги с автопилотом и GPS.
Спасибо за внимание, всем хорошего дня.
С вами был
P.S наборчик немного изменился, отличие в том, что нужно будет убрать красный(средний) провод из фишки.
Использование встроенного БЕК в регуляторе повышает его нагрев и риск выхода из строя.
Буду рад ответить на ваши вопросы.
Если надумали собрать БПЛА пишите в ЛС vk.com/konstantin_molyavin
Самые обсуждаемые обзоры
| +47 |
2164
101
|
| +44 |
2211
39
|
Я почти год летал на наза м 450й размер,250ка слишком мелкая\резвая\быстрая — привыкать надо)
Помогал многим собирать, по отзывам с жпс спокойней летать(по-себе знаю)
Есть люди, которые ставят на 450-500 сс3д и летают, я к таким я не отношусь)
Так проще)
вот где он уже был)
Один моторами.
MarsPower мне внешне нравятся.
Оба вида моторов с самоконтрящейся гайкой.
Может кто знает, есть ли опасность от мелких квадрокоптеров? Хочется назвать их детскими.
Хабсан 107 по пальцам лупит весьма неприятно.
Пластиковые пропы разлетятся сразу…
Карбон, в свою очередь может наделать бед.
Нет смысла в нет. А летать над людьми или нет… это уже ваше дело.
На 250ку точно не стоит ставить. На фантом, можно попробовать, но нет смысла. На 450 и выше, сильно возрастет парусность.
Я летаю на высоте 30-40м, приоритетно в поле и безлюдных местах.
тяга составит 840 грамм. Сам квадрик весит 430. еще батарея (1200мах 2s ) весит 70 грамм.
300 грамм в запасе. Для медленного полёта хватит, Но камеру уже не повесить.
там 3 части, сборка, настройка, подключение FPV
Он немного изменился с момента покупки.
Я использовал регули хоббивинг 10а опто. ( есть их фото )
Теперь магазин продаёт с регулями MR.RC 12а
Хорошего вам дня)
На моём 450м 15а с одного мотора в пике) суммарно система требует меньше или равно 60а.
Батареи, которые я использую, способны отдать до 100а без самоповреждения.
Не надо сравнивать с током ''из розетки''. 220 и 12 нельзя сопоставлять.
У двигателей, насколько я понимаю, максимальный ток 7А.
Я понял мысль Darken. Он удивился большой силе тока, это нормально.
Мой дядя электрик долго не верил)
И ещё на мой взгляд горизонтальные пины на плате удобней вертикальных, особенно в таких маленьких слоёных корпусах мини квадриков.
Или прошивку меняли?
Я не рискнул бы из коробки…
Все надо настраивать)
даже е-парильщики более уважительно к простому народу обзоры пишут…
я, конечно, RC-обзоры люблю и уважаю и обожаю, плюсую и в карму добра насыпАю, но у тебя как-то странно… вроде и старался хорошее до людей донести, а вроде и нет… :(
фразы комканные, фото непонятные, или серия фото, потом где-то подпись и не понятно о чем речь, так как нить уже потеряна :(
эххх… да понимаю я прекрасно, что «чукча не писатель», но…
никого не хотел обидеть, если что.
Спасибо, в будущем учту)
450 на КК это оч страшно)) Я считаю, что такие БПЛА должны иметь полноценный автопилот.
Фраза: '' на попробовать а потом куплю норм автопилот '' Деньги на ветер, да и разбить проще на таком контроллере.
Если нужно собрать коптер, пиши в лс. Помогу подобрать и настроить потом)
скайп genesiskot
Не увидел подробной комплектухи и стоимости. И он без ФПВ на первом этапе?
banggood.com/Walkera-Runner-250-Drone-Racer-Modular-Design-HD-Camera-250-Size-Racing-Quadcopter-p-980608.html — этот комплект стоит рассматривать для начала, или дешевле и лучше будет собрать свой?
Комплект хорош, заморачиваться не надо. Насчет ремонтопригодности не знаю точно, подороже будет.