Ремонт робота-мойщика окон Evenpace F400

- Цена: 5 147 рублей (на момент покупки)
- Перейти в магазин
Если верить модным нейросетям, то робот-мойщик окон — это не роскошь, а маленький, но умный помощник, который делает повседневную жизнь не только легче, но и безопасней. В общем, никого в наше время им удивить уже нельзя, даже нейросеть. Поэтому и мы около года назад решили приобщиться к технологиям и приобрести себе такого робота. Поскольку опыта работы с подобными устройствами раньше не было, да и вообще было неизвестно, понравится ли нам такой мойщик, решили взять модель подешевле, чтобы сильно не жалеть, если что-то пойдет не так. В общем, выбрали какой-то неизвестный Evenpace F400, о ремонте которого и пойдет сегодня речь.
О том, какие бывают роботы и как они умеют мыть уже сказано в интернетах немало, поэтому подробно останавливаться на этом не буду. Да, он действительно моет. Сильное загрязнение, конечно, не возьмет, но сезонное мытьё окон ему вполне по силам. Моет медленно, дольше, чем если мыть руками, но и намного удобней, особенно, если речь идет про мытье глухого окна снаружи и вы живете на высоком этаже. В общем, вещь оказалась полезная, супруга роботом довольна.
Существуют две основные модели роботов – с двумя круглыми колесами и квадратные. Квадратные обычно дороже, но, вроде как, лучше моют углы окон. Утвердить или опровергнуть не могу, поскольку у нас модель с двумя колесами и в углы добраться она не может чисто физически:

Моющие тряпки в такой модели натягиваются на пластиковое колесо:

Которое затем надевается на диск робота (слева):

И держится там с помощью шести пластиковых защелок:

Так как колесо выполнено из весьма твердого пластика, защелки оказываются совсем негибкими и достаточно быстро ломаются в момент очередного снятия колеса. А учитывая, что его надо снимать каждый раз, когда происходит замена тряпки, то есть, по два-три раза на одно окно, ломаются они буквально через пару сеансов эксплуатации:

Когда часть защелок уже отломана, колесо не так плотно прилегает к диску, что, видимо, ухудшает работу вакуумной системы присасывания робота к окну, и он начинает проскальзывать.
Сначала я пытался клеить защелки дихлорметаном:

И это действительно помогало, но ненадолго, где-то еще на один сеанс эксплуатации. Оно и понятно, ведь пластик оставался таким же жестким и склеенные защелки снова ломались. Тогда я попытался найти запасные колеса в продаже, но столкнулся с отсутствием таковых именно для моей модели. А понять, подойдут ли другие по внешнему виду товара оказалось практически невозможно, это надо было именно делать заказ, пробовать и, если что, возвращать назад. И, главное, совершенно не было уверенности, что купленные колеса будут сделаны из другого материала и тоже не сломаются через пару моек. И это при том, что цены на них весьма высокие – доходят до тысячи рублей за одну штуку.
В общем, прикинув колеса к носу, решил, что стоит попробовать напечатать их на 3д-принтере из более гибкого пластика, например, из моего любимого PETG. Поскольку колесо – достаточно сложный и точный объект, изначальной уверенности в успешности мероприятия не было, но ведь лучше попробовать и пожалеть, чем жалеть, что не попробовал.
Немного помучив SW (или себя) нарисовал по размерам вот такую модель:
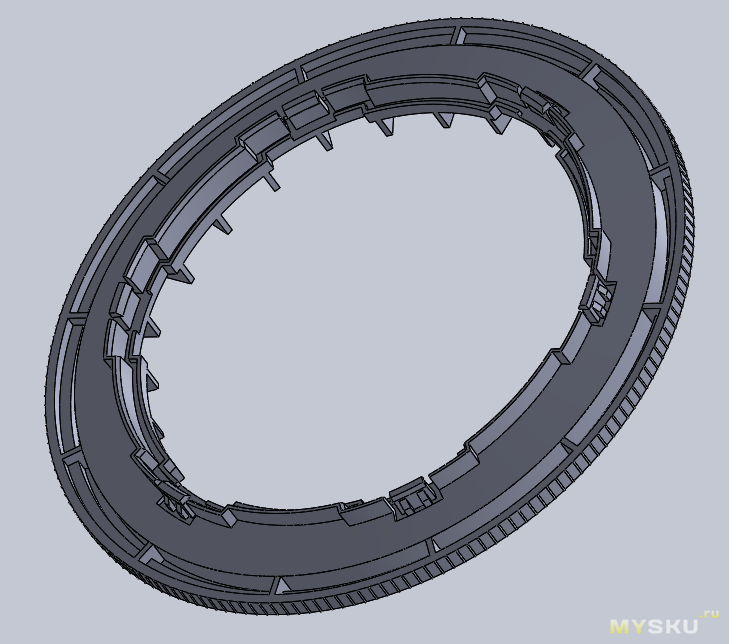
С первого раза такие модели подходят редко, поэтому, чтобы не выкидывать зря много пластика, но проверить размеры детали, сначала распечатал только её центральную часть, отвечающую за крепление колеса к диску робота:

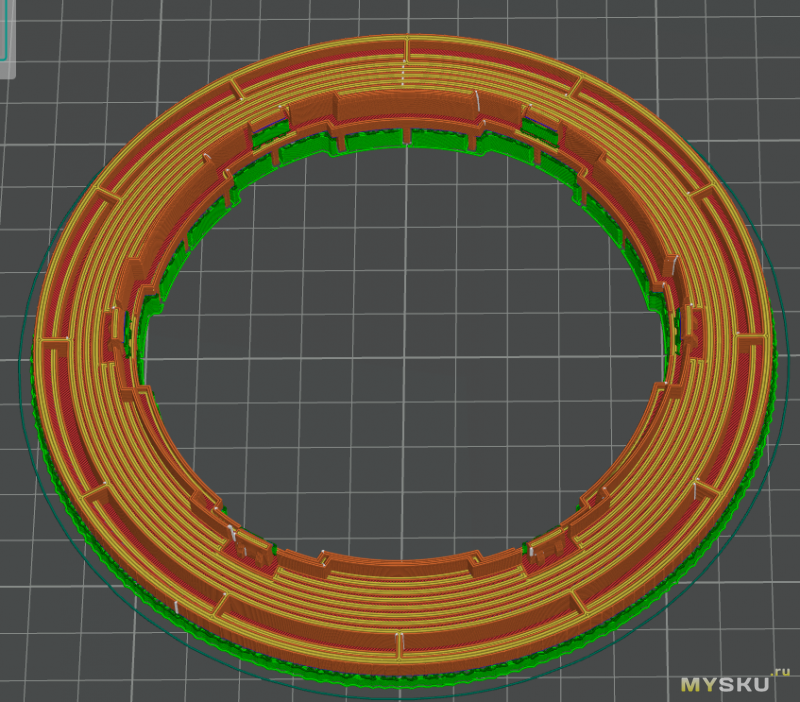
И не ошибся, выступы защелок оказались несколько коротковаты и не могли надежно удержать колесо на диске. Поправив модель, перешел к полному варианту, для правильной печати которого пришлось добавить в слайсере большое количество поддержек:
После печати и удаления поддержек получилась вот такая штуковина:


Колесо отлично встало на диск и даже защелкнулось с характерным звуком:

Теперь можно было прикрутить диск назад к валу робота (снимал на время создания модели):

И финально примерить колесо:

В итоге, роботу новое колесо понравилось, работает он с ним ничуть не хуже, чем с оригинальным, проскальзываний замечено не было:

По надежности, думаю, оно будет лучше оригинального, т.к. PETG славится своей гибкостью, а других проблем с колесом и не было. Теперь в планахоткрыть серийное производство напечатать еще одно такое же, только хочу попробовать уменьшить количество поддержек, чтобы меньше потом их отдирать.
Если кого-то моя модель заинтересовала, взять её можно тут:
www.thingiverse.com/thing:7041569
Вполне возможно, что она подойдет и для других роботов, ведь, скорее всего, это ОЕМ-производство, которое может продаваться под разными «брендами». Чтобы понять, подходит ли вам модель, лучше всего её скачать и сравнить основные размеры, промеренные в слайсере с физическими размерами требуемого колеса.
И еще одна важная деталь – перед печатью ваш принтер следует правильно откалибровать, т.к. модель относительно большая (~142 мм в диаметре) и достаточно точная. Модель для калибровки и последующий калькулятор есть, например, на сайте K3D, я калибровал свой принтер именно по ней.
По себестоимости такое колесо вышло в 45 грамм пластика (~50 рублей) плюс амортизация принтера (бесплатно бесценно) и электричество, то есть, намного дешевле любого покупного варианта. Время печати – примерно полтора часа.
Всем спасибо за внимание.
P.S. Знаю, что здесь многие ругают 3д-печать, но прошу не спешить — ведь именно благодаря ей абстрактные идеи превращаются в осязаемую реальность прямо у нас дома.
О том, какие бывают роботы и как они умеют мыть уже сказано в интернетах немало, поэтому подробно останавливаться на этом не буду. Да, он действительно моет. Сильное загрязнение, конечно, не возьмет, но сезонное мытьё окон ему вполне по силам. Моет медленно, дольше, чем если мыть руками, но и намного удобней, особенно, если речь идет про мытье глухого окна снаружи и вы живете на высоком этаже. В общем, вещь оказалась полезная, супруга роботом довольна.
Существуют две основные модели роботов – с двумя круглыми колесами и квадратные. Квадратные обычно дороже, но, вроде как, лучше моют углы окон. Утвердить или опровергнуть не могу, поскольку у нас модель с двумя колесами и в углы добраться она не может чисто физически:
Моющие тряпки в такой модели натягиваются на пластиковое колесо:
Которое затем надевается на диск робота (слева):
И держится там с помощью шести пластиковых защелок:
Так как колесо выполнено из весьма твердого пластика, защелки оказываются совсем негибкими и достаточно быстро ломаются в момент очередного снятия колеса. А учитывая, что его надо снимать каждый раз, когда происходит замена тряпки, то есть, по два-три раза на одно окно, ломаются они буквально через пару сеансов эксплуатации:
Когда часть защелок уже отломана, колесо не так плотно прилегает к диску, что, видимо, ухудшает работу вакуумной системы присасывания робота к окну, и он начинает проскальзывать.
Сначала я пытался клеить защелки дихлорметаном:
И это действительно помогало, но ненадолго, где-то еще на один сеанс эксплуатации. Оно и понятно, ведь пластик оставался таким же жестким и склеенные защелки снова ломались. Тогда я попытался найти запасные колеса в продаже, но столкнулся с отсутствием таковых именно для моей модели. А понять, подойдут ли другие по внешнему виду товара оказалось практически невозможно, это надо было именно делать заказ, пробовать и, если что, возвращать назад. И, главное, совершенно не было уверенности, что купленные колеса будут сделаны из другого материала и тоже не сломаются через пару моек. И это при том, что цены на них весьма высокие – доходят до тысячи рублей за одну штуку.
В общем, прикинув колеса к носу, решил, что стоит попробовать напечатать их на 3д-принтере из более гибкого пластика, например, из моего любимого PETG. Поскольку колесо – достаточно сложный и точный объект, изначальной уверенности в успешности мероприятия не было, но ведь лучше попробовать и пожалеть, чем жалеть, что не попробовал.
Немного помучив SW (или себя) нарисовал по размерам вот такую модель:
С первого раза такие модели подходят редко, поэтому, чтобы не выкидывать зря много пластика, но проверить размеры детали, сначала распечатал только её центральную часть, отвечающую за крепление колеса к диску робота:
И не ошибся, выступы защелок оказались несколько коротковаты и не могли надежно удержать колесо на диске. Поправив модель, перешел к полному варианту, для правильной печати которого пришлось добавить в слайсере большое количество поддержек:
После печати и удаления поддержек получилась вот такая штуковина:
Колесо отлично встало на диск и даже защелкнулось с характерным звуком:
Теперь можно было прикрутить диск назад к валу робота (снимал на время создания модели):
И финально примерить колесо:
В итоге, роботу новое колесо понравилось, работает он с ним ничуть не хуже, чем с оригинальным, проскальзываний замечено не было:
По надежности, думаю, оно будет лучше оригинального, т.к. PETG славится своей гибкостью, а других проблем с колесом и не было. Теперь в планах
Если кого-то моя модель заинтересовала, взять её можно тут:
www.thingiverse.com/thing:7041569
Вполне возможно, что она подойдет и для других роботов, ведь, скорее всего, это ОЕМ-производство, которое может продаваться под разными «брендами». Чтобы понять, подходит ли вам модель, лучше всего её скачать и сравнить основные размеры, промеренные в слайсере с физическими размерами требуемого колеса.
И еще одна важная деталь – перед печатью ваш принтер следует правильно откалибровать, т.к. модель относительно большая (~142 мм в диаметре) и достаточно точная. Модель для калибровки и последующий калькулятор есть, например, на сайте K3D, я калибровал свой принтер именно по ней.
По себестоимости такое колесо вышло в 45 грамм пластика (~50 рублей) плюс амортизация принтера (
Всем спасибо за внимание.
P.S. Знаю, что здесь многие ругают 3д-печать, но прошу не спешить — ведь именно благодаря ей абстрактные идеи превращаются в осязаемую реальность прямо у нас дома.
Самые обсуждаемые обзоры
| +59 |
1463
38
|
| +111 |
3706
120
|
| +23 |
454
11
|
Кстати, на фото этаж-то не известен, может там и второй?
Пластик корпуса ломучий, да — разок грохнулся на пол и кранты:)
Вдруг мои чуть больше, я их купил с большим запасом, а так и чищу двумя парами:)
См лс.
Но у этих роботов один неисправимый «дефект». Они не моют углы.
www.ozon.ru/product/robot-moyshchik-okon-s-raspyleniem-w21s-flybot-so-smennymi-salfetkami-10-sht-1147690244/
По качеству мойки, думаю, они все примерно одинаковы.
А качества мытья… Мне нравится. Кстати, плюнул на спиСфические моющие средства. Обычный стекломой брызгалкой на стекло. Раз в 5 дешевле.
Углы «шваброй для окон» уже поправить. А вылезть на подоконник… Увольте. Сидишь, балдишь, а эта штука окно драит.
Вай-фаи и кофеварки считаю тут излишним. Всё равно каждые митут 3-5 на следующие окно переставлять. :)
У меня ozon.ru/t/bpkBUF1 такой тоже второй год ;)
Целых 4 применения правда
Но падение на ламинат и отрыв от окна + удар о внешние панели дома он пережил (зацепился шнуром и сам себя оторвал из-за этого)
Отличный результат получается с двух проходов: сначала сухой, потом с распылителем. При этом сухой проход всю пыль сносит с окна и не размазывает потом лишний раз. А влажный проход уже чисто вытирает. В таком режиме тряпок надо 2 комплекта на окно.
Например, про мытье автомобильных стекол прямо пишут:
Здесь принципиально отличий нет.
Но на оконном стекле вряд ли задержатся какие крупные абразивные частицы. Да один фиг руками лучше не помыть, только если снаружи и специальными скребками.
Удвойте количество радиальных лучей и они выступят поддержками. Скруглите переходы между ними и горизонтальной частью.
На функционал это не повлияет.
При создании модели стоит учитывать особенности технологии производства и принципа работы устройства, а не просто копировать геометрию.
А что касается внешней окружности и защелок — тут без поддержек никак.
Повлияет, но не думаю, что сильно. Эти лучи совместно с диском робота образуют 24 камеры, через которые идет засасывание воздуха. Если в колесе их станет 48, засасывание будет происходить несколько иначе.
Когда создаю модели, сначала предпочитаю именно скопировать оригинал, это же рабочая база. А всякими улучшениями начинаю заниматься уже потом.
А тут пластика на поддержки потратили примерно столько же, сколько бы вышло на монолитную деталь с 15% заполнения.
ozon.ru/t/unGTcOs
Скорее они «мультиформатные» для подобных роботов. У меня с виду такой же
С телефона тонкости не разглядеть…
Скорее они «мультиформатные»
Да у жены робот CHOVERY, посмотрел на сайте который выше кидали, Померил линейкой размеры ни те (внутренний диаметр 110мм, наружний диаметр 143мм), но крепежи такие-же.
Но жена говорит что раньше туго отстёгивались эти кружки, А щас полегче. Пошел проверил))) ага все крепежи на месте.