Операция по трансплантации: мучаем квадрокоптер CXHobby CX-20. Часть 1

- Цена: $10.22
- Перейти в магазин
Спустя некоторое время после написания обзора на квадрокоптер CXHobby CX-20 решено было модернизировать этот аппарат. Особой потребности на то не было, но так как чесались руки, то почему бы и нет? Да и штатный, хрупкий, корпус совсем ни куда не годится — одно-другое падение и выкладывай 30 долларов за новый. В последствии было решено разбить статью на несколько частей. Повествование буду вести от первого лица, т.е. обычный рассказ (guideline) иллюстрированный фото и дополненный советами/полезными ссылками по сборке. You're Welcome, как говорится. :)
В начале зимы я разобрал аппарат для повторного изучения, но так и не вернул его в прежнее состояние. :) Пару месяцев детали пылились в коробке, пока не были собраны все необходимые комплектующие.

Старый корпус, пусть и после ремонта по прежнему жив и пригоден для эксплуатации, о причине крушения и сотворении «франкекоптера» (так его нарекли в комментариях) я писал в обзоре.

Новая рама — DJI F330, а точнее копия оной. Покупал на Banggood за 10 долларов (рефералка).

Основой рамы является печатная плата из текстолита толщиной 2 мм, которая служит распределителем питания от аккумулятора к связке ESC-мотор.

Ну, а скупой, как это случается — платит дважды. Один белый луч (правый), мягко скажем, «кривоват», что может повлиять на поведение аппарата в воздухе. Посмотрим, что из этого выйдет.

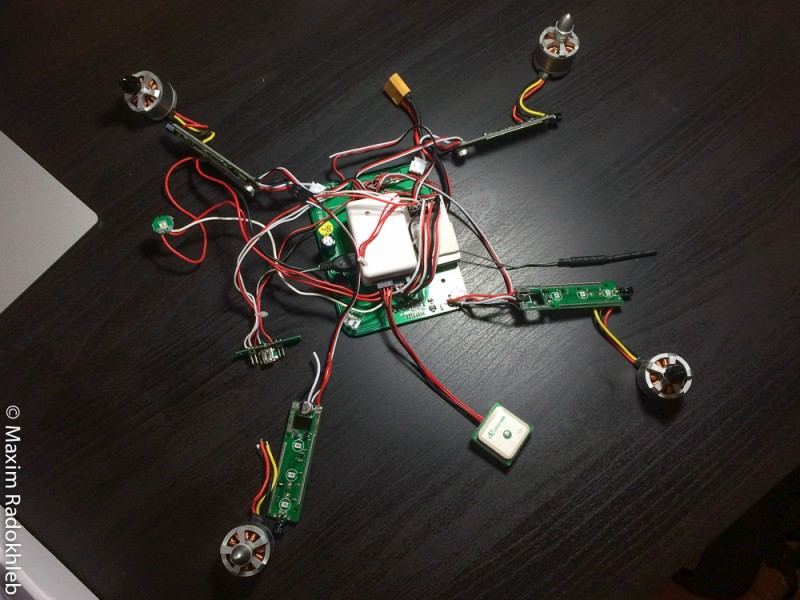
Собственной персоной электронная начинка квадрокоптера. Часть оной будет выпилено для усовершенствования и облегчения конструкции.
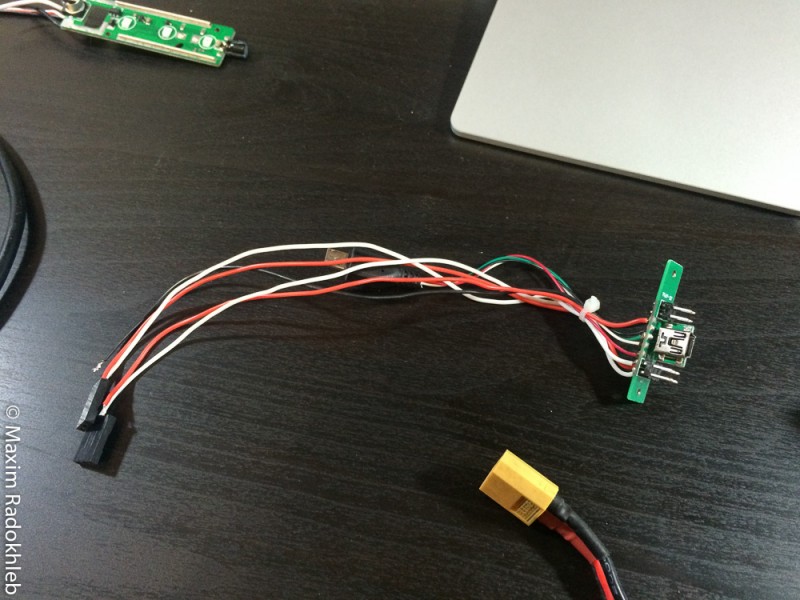
Начинаю с отключения «лишних» модулей. Снимаю абсолютно странный переходник с MicroUSB, которых сейчас дома навалом, на MiniUSB, которого в комплекте с аппаратом нет. Тут же удлинители доп. каналов от ресивера для управления подвесом, например.
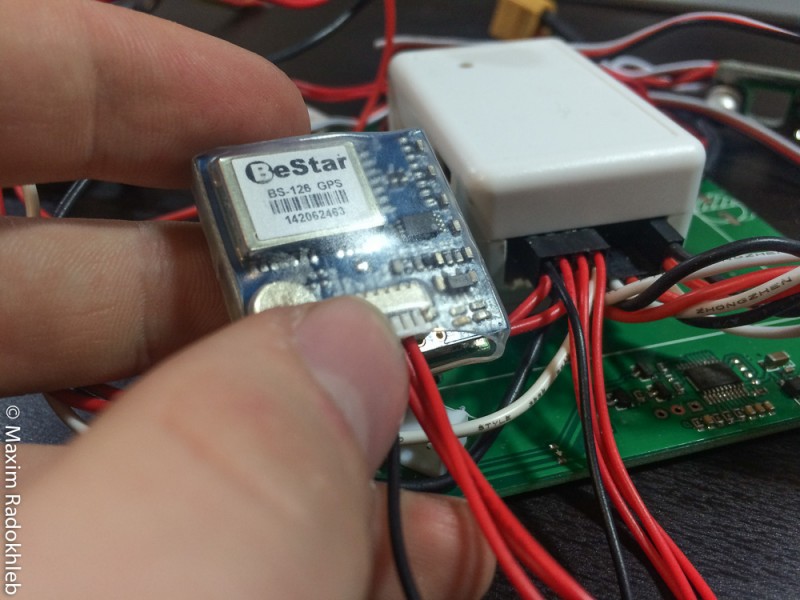
BeStar GPS общается с контроллером по UART (можно использовать в домашних поделках). Тоже снимаю.
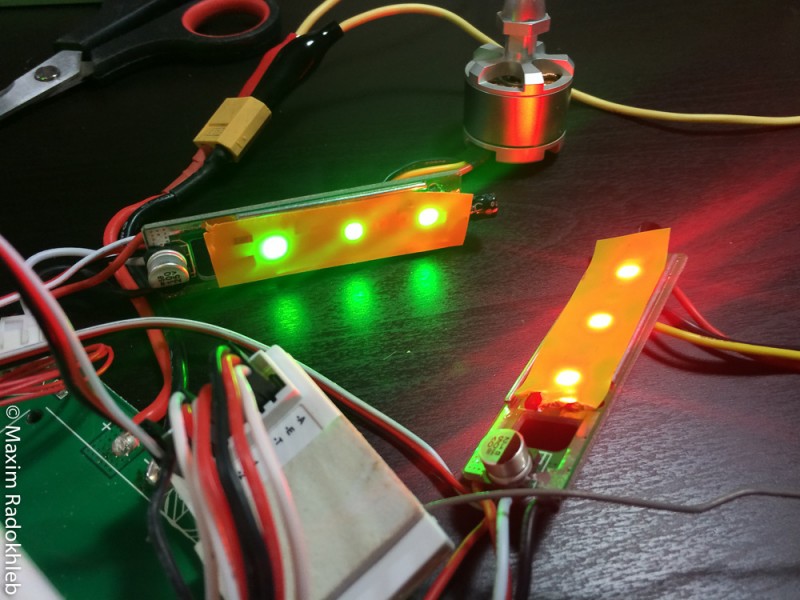
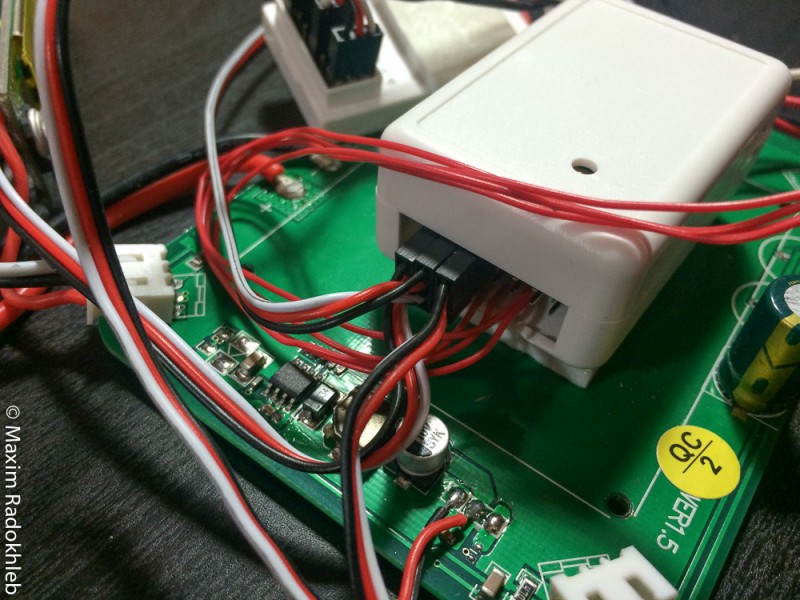
Подключил к остаткам электроники лабораторный блок питания дабы снять все опорные напряжения. Изначально я собирался разобраться в работе платы управления светодиодом и пищалкой, но позже это желание приутихло и решено было избавиться от нее.

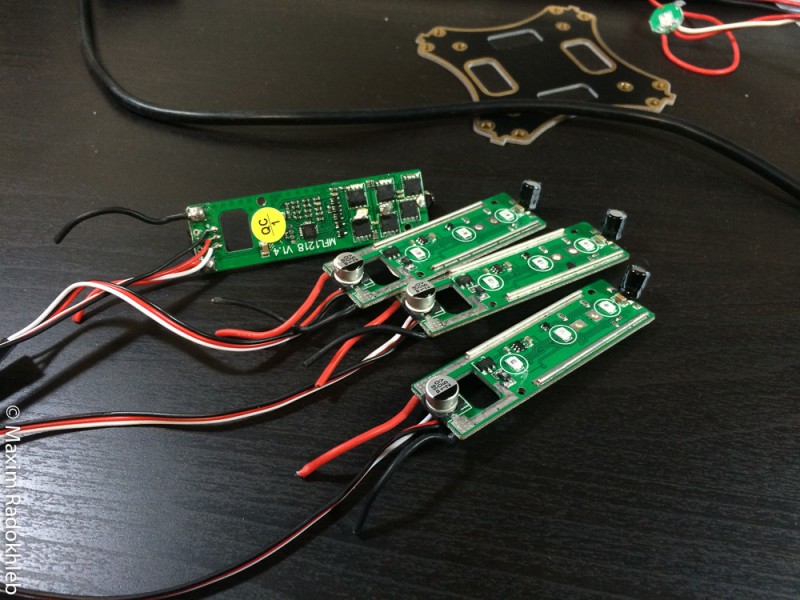
Напряжение на примере ESC с зелеными светодиодами (авось кому понадобится). К контроллеру скорости подключено 2 пары по 3 провода, одни толстые (PWR) — для питания, другие тоньше (signal) — для взаимодействия с контроллером.
PWR: Black-White (постоянное свечение светодиодов) — 1.93V; Black-Red — совпадает с бортовым напряжением.
signal: Black-White — 2.56V; Black-Red — 5.25V.
Теперь по очереди отключаю ESC от платы питания и от контроллера. Попутно все фотографирую, дабы потом не залипать в мануал по настройке. Напоминаю, что в мультироторных системах от расположения почти всего и вся (моторы, контроллер, компас) зависит полетит ли ваш аппарат в будущем.
Снимаю индикаторы Arming и GPS.

У одного из ESC был дополнительный красный провод подключенный к микроконтроллеру. Ясно, что провод как-то связан с управлением бортовой индикацией и пищалкой, но разбираться дальше в китайской самодеятельности желания особого не было.
С детальками для квадрика было закуплено немножко инструмента (а еще часть «подогнали» на обзор некоторые магазины). Так что я периодически буду разбавлять опус вставками о новых девайсах. Вот, например, годный паяльник предоставленный бесплатно магазином Eachbuyer. Я на него давно «облизывался» из-за компактности и поддержки стандартных жал Hakko.
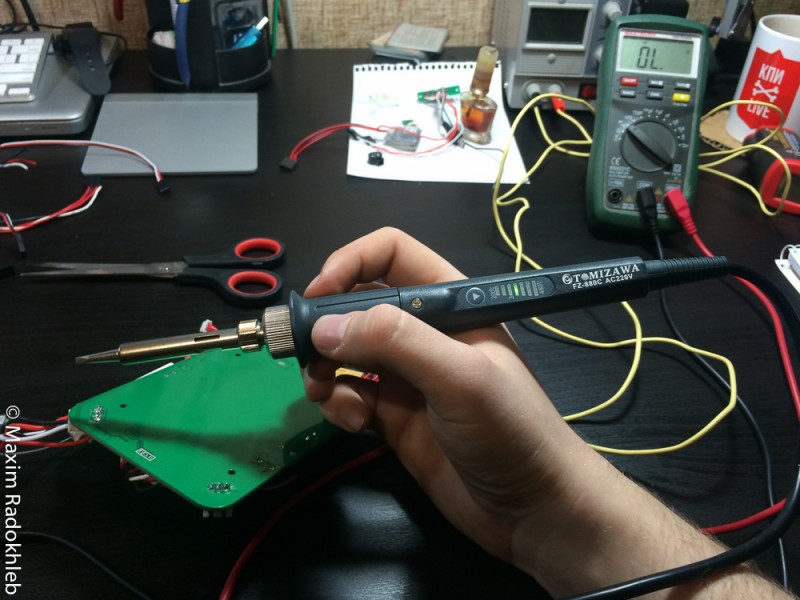
Еще из плюсов TOMIZAWA FZ-880С: керамическая грелка, быстрый нагрев, контроль температуры по сопротивлению нагревателя (поддержка заданой температуры), гибкий провод пусть и с AU-вилкой. Хороший обзор этого паяльника на mysku с замерами температуры тут. Кстати, вот эту подставку под этот паяльник брать не советую — она пластиковая, очень легкая и постоянно ерзает по столу. Позже на барахолке нашел металлическую от паяльной станции AOYUE, пусть и чуть дороже, но зато много удобнее.

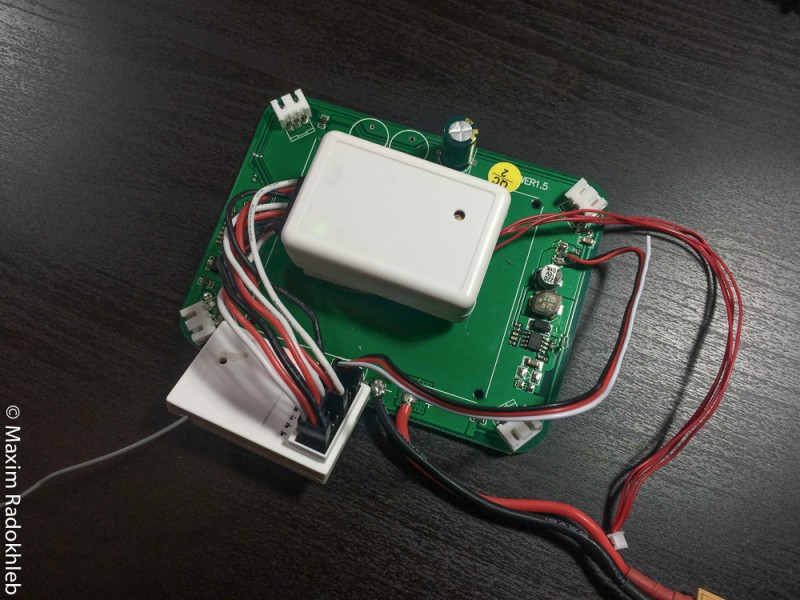
Тем временем я уже почти «расщепил» электронику квадрокоптера.
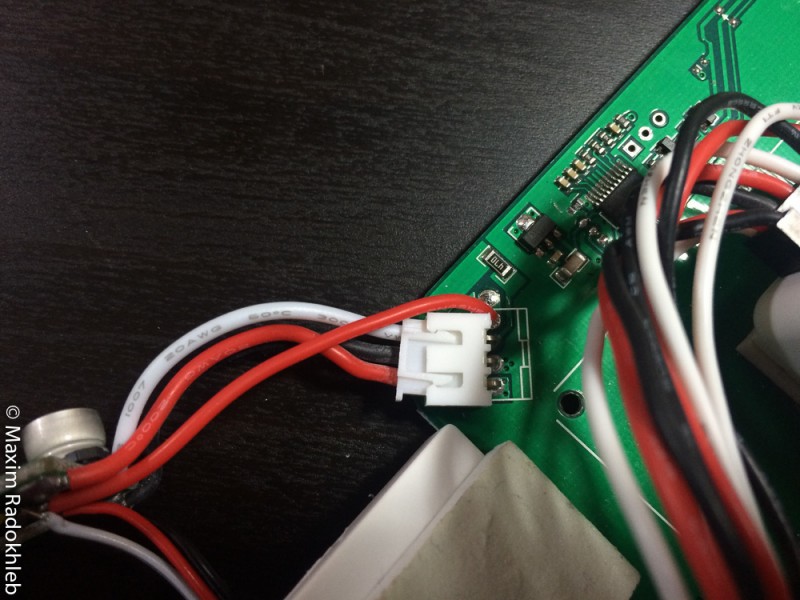
Питание контроллеру от преобразователя на плате распределения питания передается через ресивер радиоаппаратуры. «Мозги» работают от импульсного преобразователя на микросхеме MP1593.

Собственно сама плата распределения питания:

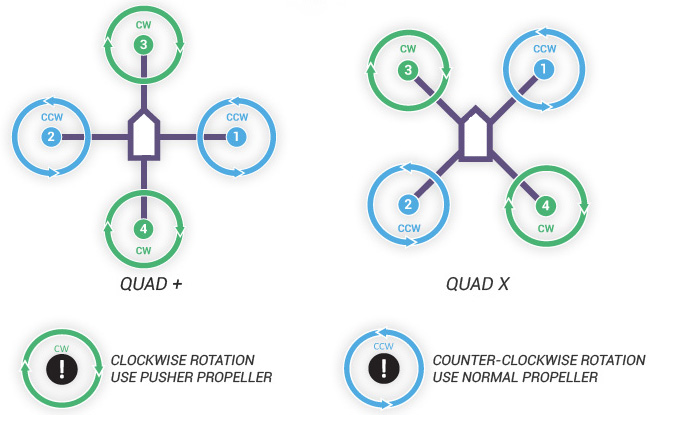
Устанавливаю моторы. Тут нужно помнить, что у нас 2 разных пары моторов — одни вращаются по часовой (CW), другие против (CCW). Отличить их можно по цвету верхней гайки (черная — по часовой) или по точке под этой самой гайкой (если есть, то по часовой, если нет, то против). В крайнем случае по резьбе: она обратна вращению мотора.
Забегая наперед решил примерить заведомо приобретенные в GearBest самозатягивающиеся пропеллеры 9443. Брал не особо думая и из расчета на то, что они точно подходят для DJI Phantom. 9 долларов не жалко, конечно, ибо локально продать и дороже можно. :)

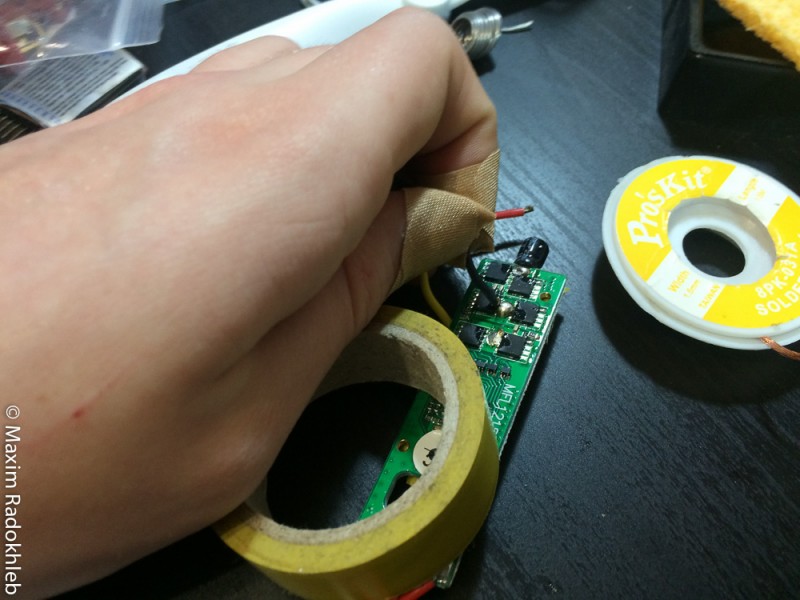
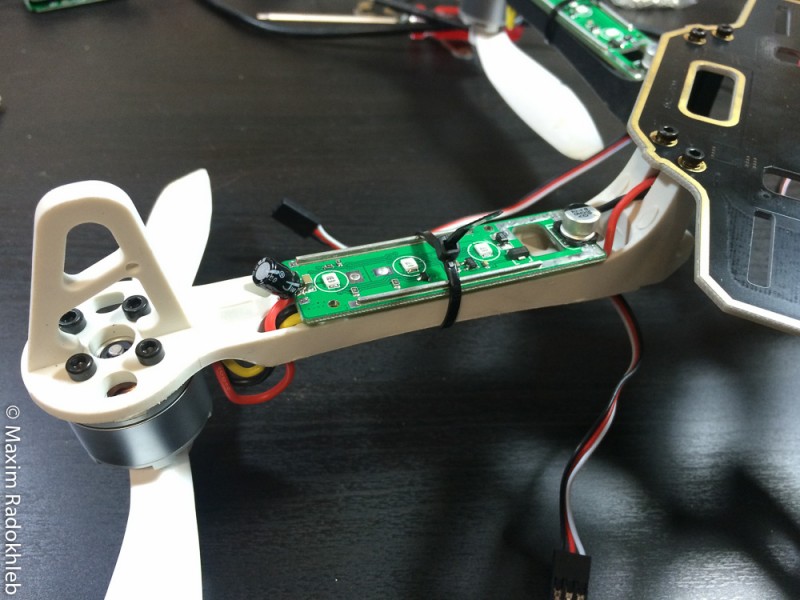
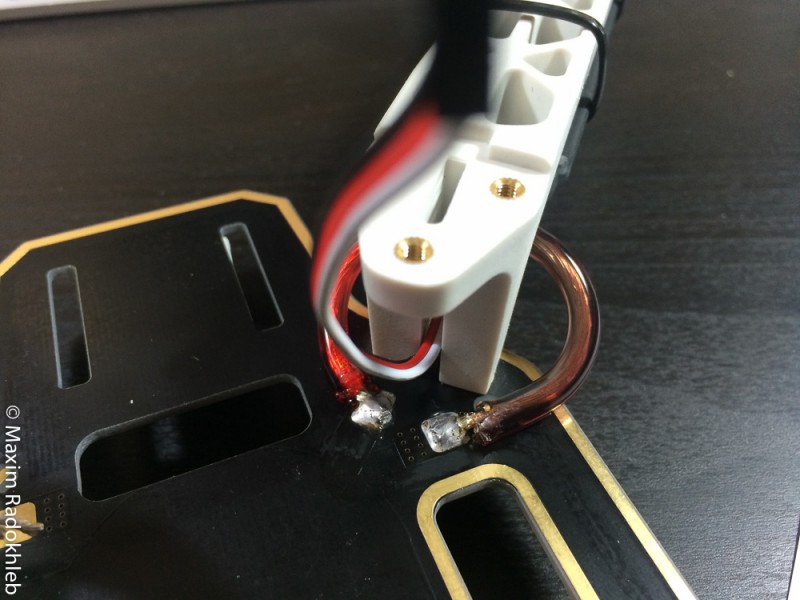
Провода от моторов к ESC пропускаю через прорези в лучах рамы. Аналогично исходной конструкции они будут намертво припаяны к плате регуляторов скорости. Лайфхак: провода толстые, припоя на пятачках много и чтоб не обжечь пальцы я использую простой одноразовый пластырь для повышения теплоизоляции оных. Тисков нет и пока не предвидится, да. :(
Примерка модулей:

Точной информации относительно характеристик контролеров скорости нет, но следуя информации с зарубежных форумов ESC рассчитаны на ток до 15А. Информация на случай замены моторов.
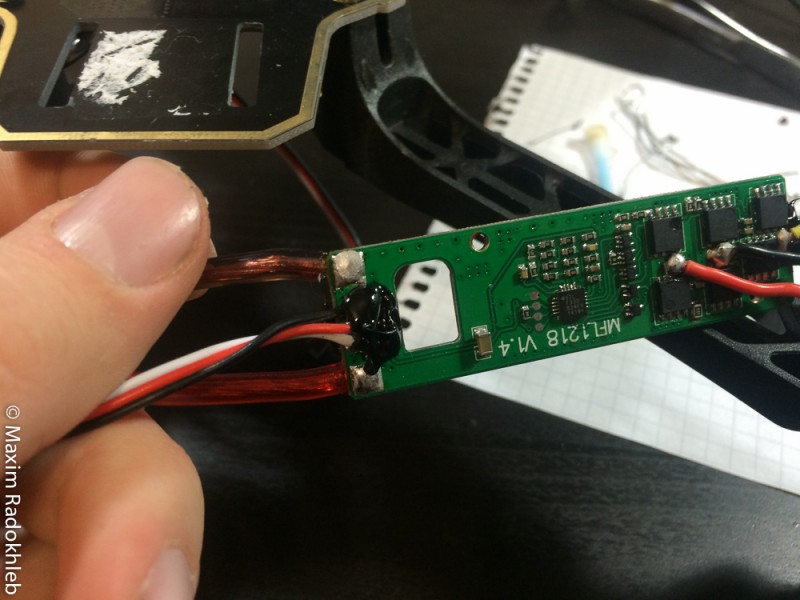
Белый силовой провод был отпаян, т.к. в финальной версии своего аппарата я решил не задействовать светодиоды на ESC. По сути, провода от моторов можно подключить «один к одному» и настроить все это дело программно, но лучше воспользоваться способом смены мест крайних проводов у пары CW или CCW моторов ака сделать как было в аппарате-доноре.

Временно креплю контроллеры скорости кабельными стяжками дабы не мешались во время установки остальных регуляторов.
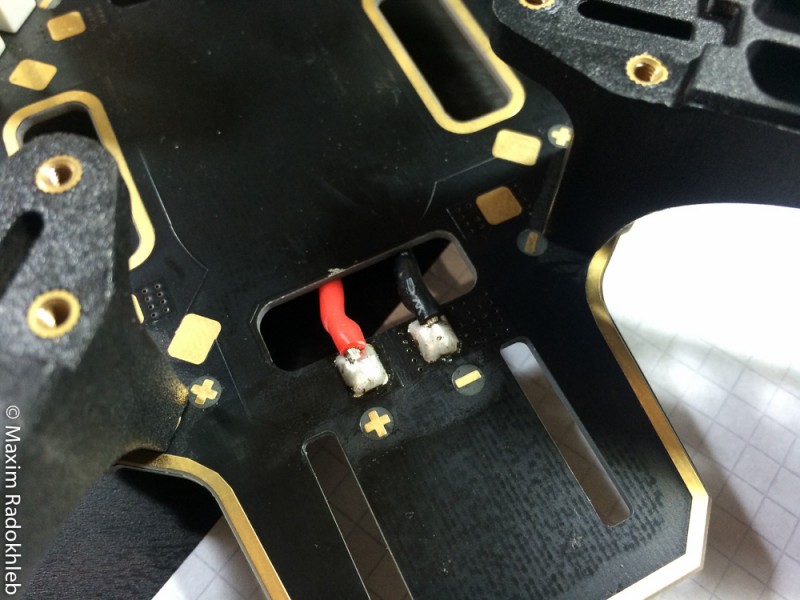
Попутно припаиваю провода питания к основе рамы.
Длинны оригинальных проводов от ESC к плате распределения питания, к сожалению, не хватает. Опять же нужно будет закупить проводов разного диаметра с термостойкой оболочкой.
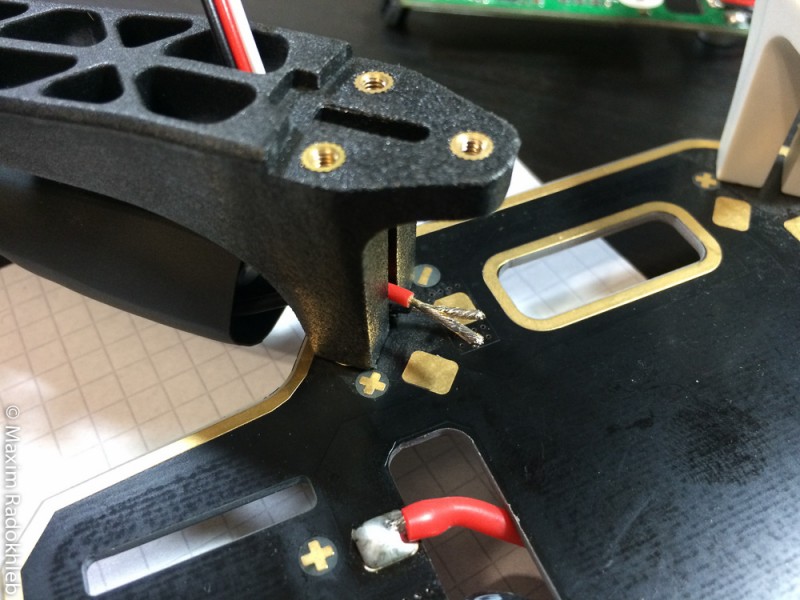
А пока выкручиваюсь при помощи толстого аудиокабеля (16 AWG). По спецификации он должен держать ток до 22А, а с нашими моторами такого даже в пик не получить. Посмотрим на результаты в первых тестовых полетах. Лайфхак: паять толстые провода на большие полигоны «дедовским» методом (набирая припой на жало паяльника) совсем неудобно, да и коряво получается. Поэтому для начала обильно залуживаю площадку и провод, а после спаиваю нагреванием площадки через провод.
Уверенности ради закрепил конденсаторы на плате ESC термоклеем:

Аналогично поступил с сигнальным проводами:
Все это упаковываю в термоусадочную трубку и креплю снизу луча посредством нескольких стяжек.

Сигнальные провода пропускаю через прорезь у места крепления луча к раме.

А общая картина первых двух дней выглядит следующим образом:

EachBuyer, которые заслали мне на обзор паяльник и подставку для оного (рассказывал о них выше) также подкинули десяток Т-образных силовых разъемов на которые я думал перейти с XT60, да так и не сложилось. Разъемы вроде не плохие, но пока не понадобились.

Балансировка пропеллеров производится для уменьшения уровня вибраций квадрокоптера, которые негативно влияют на работу бортовых датчиков. Балансировать будем всё, что еще можно использовать для полетов.

Балансир выбрал первый попавшийся с хорошими отзывами, брал в TomTop за 6 долларов.

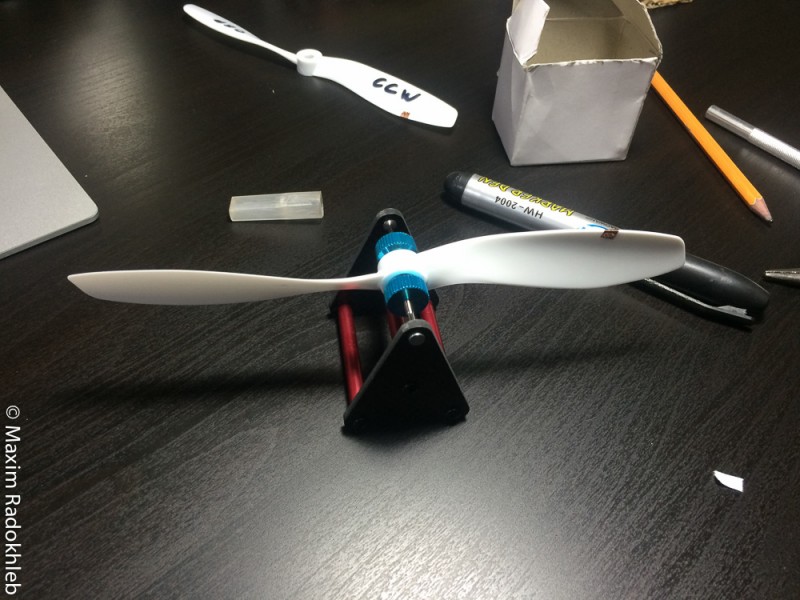
Между двумя магнитами устанавливается штифт на который посредством двух резьбовых конусов крепится пропеллер для балансировки.

Ставлю пропеллер с BangGood. В целом держится не плохо, устанавливаю его параллельно поверхности — одна из лопастей перевешивает другую.

Балансировать можно стачивая часть пластика с пропеллера наждачной бумагой (вот тут хорошо описан этот способ и в целом процесс балансировки) или просто наклеивая скотч на более легкую лопасть. Я использую медную самоклейку:
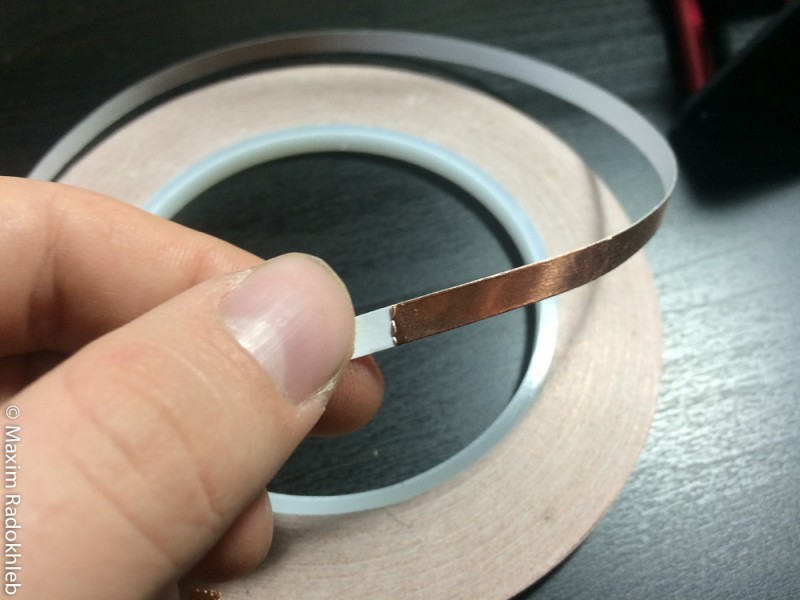
Клею на лопасть, которая оказывается вверху при балансировке.

Проверяю:
Идеально! Пропеллер не перекашивает ни в одну из сторон. Аналогичная процедура производиться с остальными винтами. Вот, например, последний «живой» пропеллер из комплекта к квадрокоптеру CX-20. Он был ужасно разбалансирован:

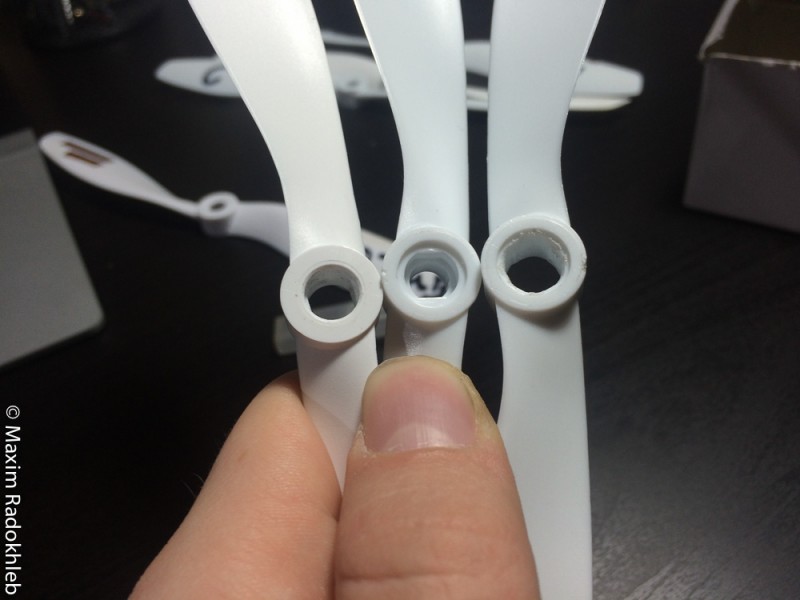
Кстати, оригинальные винты от DJI тоже достаточно сильно перекашивало, а лучше всего себя показали банггудовские, которые, к сожалению, из коробки не подошли к моим моторам. В каждом пришлось расточить отверстие. Слева на право: DJI, BangGood до модификации, после модификации.
На сегодня все. Через неделю расскажу о других косметических работах, установке «мозгов», создании и установке собственного источника питания для контроллера и первых тестах.
Все интересующие вас вопросы и пожелания можно также задавать в соцсетях: Facebook, ВКонтакте, Twitter, Instagram (кстати, подписывайтесь — тут также иногда проскакивают интересные девайсы).
Attention! У меня, внезапно, появились проблемы с камерой из-за чего сильно пострадало качество фото в статье — снимал на iPhone. Также текст может содержать и наверняка содержит грамматические, орфографические, пунктуационные и другие виды ошибок, включая смысловые. Я всячески прошу читателей указывать на эти ошибки и поправлять меня посредством личных сообщений. Предварительно советую ознакомиться с моим обзором квадрокоптера CXHobby CX-20 для лучшего понимания происходящего.
В начале зимы я разобрал аппарат для повторного изучения, но так и не вернул его в прежнее состояние. :) Пару месяцев детали пылились в коробке, пока не были собраны все необходимые комплектующие.
Старый корпус, пусть и после ремонта по прежнему жив и пригоден для эксплуатации, о причине крушения и сотворении «франкекоптера» (так его нарекли в комментариях) я писал в обзоре.
Новая рама — DJI F330, а точнее копия оной. Покупал на Banggood за 10 долларов (рефералка).
Основой рамы является печатная плата из текстолита толщиной 2 мм, которая служит распределителем питания от аккумулятора к связке ESC-мотор.
Ну, а скупой, как это случается — платит дважды. Один белый луч (правый), мягко скажем, «кривоват», что может повлиять на поведение аппарата в воздухе. Посмотрим, что из этого выйдет.
Собственной персоной электронная начинка квадрокоптера. Часть оной будет выпилено для усовершенствования и облегчения конструкции.
Начинаю с отключения «лишних» модулей. Снимаю абсолютно странный переходник с MicroUSB, которых сейчас дома навалом, на MiniUSB, которого в комплекте с аппаратом нет. Тут же удлинители доп. каналов от ресивера для управления подвесом, например.
BeStar GPS общается с контроллером по UART (можно использовать в домашних поделках). Тоже снимаю.
Подключил к остаткам электроники лабораторный блок питания дабы снять все опорные напряжения. Изначально я собирался разобраться в работе платы управления светодиодом и пищалкой, но позже это желание приутихло и решено было избавиться от нее.
Напряжение на примере ESC с зелеными светодиодами (авось кому понадобится). К контроллеру скорости подключено 2 пары по 3 провода, одни толстые (PWR) — для питания, другие тоньше (signal) — для взаимодействия с контроллером.
PWR: Black-White (постоянное свечение светодиодов) — 1.93V; Black-Red — совпадает с бортовым напряжением.
signal: Black-White — 2.56V; Black-Red — 5.25V.
Теперь по очереди отключаю ESC от платы питания и от контроллера. Попутно все фотографирую, дабы потом не залипать в мануал по настройке. Напоминаю, что в мультироторных системах от расположения почти всего и вся (моторы, контроллер, компас) зависит полетит ли ваш аппарат в будущем.
Снимаю индикаторы Arming и GPS.
У одного из ESC был дополнительный красный провод подключенный к микроконтроллеру. Ясно, что провод как-то связан с управлением бортовой индикацией и пищалкой, но разбираться дальше в китайской самодеятельности желания особого не было.
С детальками для квадрика было закуплено немножко инструмента (а еще часть «подогнали» на обзор некоторые магазины). Так что я периодически буду разбавлять опус вставками о новых девайсах. Вот, например, годный паяльник предоставленный бесплатно магазином Eachbuyer. Я на него давно «облизывался» из-за компактности и поддержки стандартных жал Hakko.
Еще из плюсов TOMIZAWA FZ-880С: керамическая грелка, быстрый нагрев, контроль температуры по сопротивлению нагревателя (поддержка заданой температуры), гибкий провод пусть и с AU-вилкой. Хороший обзор этого паяльника на mysku с замерами температуры тут. Кстати, вот эту подставку под этот паяльник брать не советую — она пластиковая, очень легкая и постоянно ерзает по столу. Позже на барахолке нашел металлическую от паяльной станции AOYUE, пусть и чуть дороже, но зато много удобнее.
Тем временем я уже почти «расщепил» электронику квадрокоптера.
Питание контроллеру от преобразователя на плате распределения питания передается через ресивер радиоаппаратуры. «Мозги» работают от импульсного преобразователя на микросхеме MP1593.
Собственно сама плата распределения питания:
Устанавливаю моторы. Тут нужно помнить, что у нас 2 разных пары моторов — одни вращаются по часовой (CW), другие против (CCW). Отличить их можно по цвету верхней гайки (черная — по часовой) или по точке под этой самой гайкой (если есть, то по часовой, если нет, то против). В крайнем случае по резьбе: она обратна вращению мотора.
Забегая наперед решил примерить заведомо приобретенные в GearBest самозатягивающиеся пропеллеры 9443. Брал не особо думая и из расчета на то, что они точно подходят для DJI Phantom. 9 долларов не жалко, конечно, ибо локально продать и дороже можно. :)
Провода от моторов к ESC пропускаю через прорези в лучах рамы. Аналогично исходной конструкции они будут намертво припаяны к плате регуляторов скорости. Лайфхак: провода толстые, припоя на пятачках много и чтоб не обжечь пальцы я использую простой одноразовый пластырь для повышения теплоизоляции оных. Тисков нет и пока не предвидится, да. :(
Примерка модулей:
Точной информации относительно характеристик контролеров скорости нет, но следуя информации с зарубежных форумов ESC рассчитаны на ток до 15А. Информация на случай замены моторов.
Белый силовой провод был отпаян, т.к. в финальной версии своего аппарата я решил не задействовать светодиоды на ESC. По сути, провода от моторов можно подключить «один к одному» и настроить все это дело программно, но лучше воспользоваться способом смены мест крайних проводов у пары CW или CCW моторов ака сделать как было в аппарате-доноре.
Временно креплю контроллеры скорости кабельными стяжками дабы не мешались во время установки остальных регуляторов.
Попутно припаиваю провода питания к основе рамы.
Длинны оригинальных проводов от ESC к плате распределения питания, к сожалению, не хватает. Опять же нужно будет закупить проводов разного диаметра с термостойкой оболочкой.
А пока выкручиваюсь при помощи толстого аудиокабеля (16 AWG). По спецификации он должен держать ток до 22А, а с нашими моторами такого даже в пик не получить. Посмотрим на результаты в первых тестовых полетах. Лайфхак: паять толстые провода на большие полигоны «дедовским» методом (набирая припой на жало паяльника) совсем неудобно, да и коряво получается. Поэтому для начала обильно залуживаю площадку и провод, а после спаиваю нагреванием площадки через провод.
Уверенности ради закрепил конденсаторы на плате ESC термоклеем:
Аналогично поступил с сигнальным проводами:
Все это упаковываю в термоусадочную трубку и креплю снизу луча посредством нескольких стяжек.
Сигнальные провода пропускаю через прорезь у места крепления луча к раме.
А общая картина первых двух дней выглядит следующим образом:
EachBuyer, которые заслали мне на обзор паяльник и подставку для оного (рассказывал о них выше) также подкинули десяток Т-образных силовых разъемов на которые я думал перейти с XT60, да так и не сложилось. Разъемы вроде не плохие, но пока не понадобились.
Балансировка пропеллеров
На момент сборки в наличии был комплект родных винтов (3), noname 8045 (первые две цифры — длинна пропеллера, в моем случае 8 дюймов) пропеллеры приобретенные в магазине BangGood (4), пара CW&CCW пропеллеров от DJI (2) и 9.4-дюйомвые винты из GearBest (1), которые не подходят к этой раме.Балансировка пропеллеров производится для уменьшения уровня вибраций квадрокоптера, которые негативно влияют на работу бортовых датчиков. Балансировать будем всё, что еще можно использовать для полетов.
Балансир выбрал первый попавшийся с хорошими отзывами, брал в TomTop за 6 долларов.
Между двумя магнитами устанавливается штифт на который посредством двух резьбовых конусов крепится пропеллер для балансировки.
Ставлю пропеллер с BangGood. В целом держится не плохо, устанавливаю его параллельно поверхности — одна из лопастей перевешивает другую.
Балансировать можно стачивая часть пластика с пропеллера наждачной бумагой (вот тут хорошо описан этот способ и в целом процесс балансировки) или просто наклеивая скотч на более легкую лопасть. Я использую медную самоклейку:
Клею на лопасть, которая оказывается вверху при балансировке.
Проверяю:
Идеально! Пропеллер не перекашивает ни в одну из сторон. Аналогичная процедура производиться с остальными винтами. Вот, например, последний «живой» пропеллер из комплекта к квадрокоптеру CX-20. Он был ужасно разбалансирован:
Кстати, оригинальные винты от DJI тоже достаточно сильно перекашивало, а лучше всего себя показали банггудовские, которые, к сожалению, из коробки не подошли к моим моторам. В каждом пришлось расточить отверстие. Слева на право: DJI, BangGood до модификации, после модификации.
На сегодня все. Через неделю расскажу о других косметических работах, установке «мозгов», создании и установке собственного источника питания для контроллера и первых тестах.
Все интересующие вас вопросы и пожелания можно также задавать в соцсетях: Facebook, ВКонтакте, Twitter, Instagram (кстати, подписывайтесь — тут также иногда проскакивают интересные девайсы).
| +113 |
21438
83
|
| +72 |
21350
86
|
Самые обсуждаемые обзоры
| +66 |
2857
107
|
| +55 |
3190
35
|
За обзор ++++ Один из редких содержательных обзоров без углубления в нюансы схемотехники))
основная болезнь при жестком приземлении у родных лучей DJI отламываются вертикальные стойки
но мы присмотрели идею у helipal и сразу насаживаем на стойки легкие полиуретановые шарики аля теннисные, крепление стяжкой.