Обзор гоночного квадрокоптера Eachine Racer 250 DIY KIT

- Цена: 126,99$
- Перейти в магазин
Всем привет. Сегодня на обзоре гоночный квадрокоптер с БК моторами и FPV системой Eachine Racer 250 DIY KIT. Обзор скорее посвящен новичкам, далеким от сборки, настройки, прошивки любых операций необходимых для того, что бы он наконец то взлетел. Обзор вводный с описанием всех необходимых мелочей с которыми столкнётся любой желающий вникнуть в тематику гоночных квадрокоптеров.
 Для начала немного теории. Данный квадрик 250-го размера, расстояние по диагонали между осями моторов у него равняется 280м. Габариты: 220х233x50 мм. Вес: 400 гр (без аккумулятора)
Для начала немного теории. Данный квадрик 250-го размера, расстояние по диагонали между осями моторов у него равняется 280м. Габариты: 220х233x50 мм. Вес: 400 гр (без аккумулятора)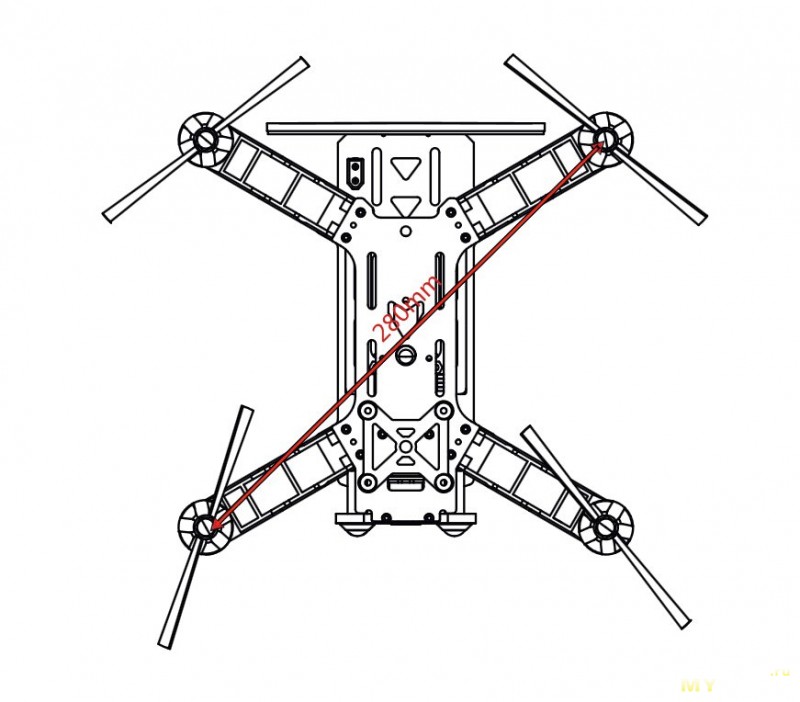 Предназначен исключительно для гоночных полётов с элементами фристайла.
Предназначен исключительно для гоночных полётов с элементами фристайла.
Данный класс квадрокоптеров совсем не предназначен для плавной съемки с воздуха, так что если ваша цель медленно и плавно летать, а так же получать красивые кадры с воздуха – то подобные квадрики не для вас! Если вы хотите погонять, полетать, поделать флипы и разные «трюки», а так же почувствовать себя пилотом и увидеть полёт от первого лица, таким, каким его видят летающие пернатые и герои фильма «Звездные войны» то это все для вас!
Сам я довольно долго скептически относился ко всем этим квадрокоптерам, хотя уже пару лет в летний период муска буквально завалена обзорами про всевозможные варианты квадрокоптеров. Обычно это RTF (Rady to Fly – готовый к полёту из коробки) за 15-50 баксов.
Но однажды на Youtube я случайно наткнулся на видео и очень уж мне захотелось, самому ощутить все прелести прямой трансляции полётов.
Данный тип квадрокоптеров обычно продается весь по-отдельности. т.е. буквально, если захотеть собрать что-то подобное то помимо самого квадрокоптера необходимо будет докупить: 1) Аппаратуру управления с приемником, который устанавливаем в квадрик; 2) Аккумуляторы (хотя бы 2-3 штуки); 3) Видео очки, шлем или монитор для FPV полётов. 4) Ну и обычные расходники в виде запасных лопастей, пары моторов и т.д.
Для новичков, пожалуй, следует отдельно отметить, что аппаратуры от квадриков типа Syma, Tarantula, JJRC и т.д. не подходят, нужна аппаратура по типу – Flysky FS-i6, Radiolink AT9 и т.д. По поводу аккумуляторов, то для данного типа квадрокоптеров подходят аккумуляторы 3S или 4S, как правило, чаще всего используют аккумы емкостью от 1500 до 2200mAh. Видеоочки и шлемы нужны, прежде всего, для того, что бы получить максимум удовольствия от полёта. По монитору летать на гоночных квадриках неудобно, хотя и возможно.
По поводу аккумуляторов, то для данного типа квадрокоптеров подходят аккумуляторы 3S или 4S, как правило, чаще всего используют аккумы емкостью от 1500 до 2200mAh. Видеоочки и шлемы нужны, прежде всего, для того, что бы получить максимум удовольствия от полёта. По монитору летать на гоночных квадриках неудобно, хотя и возможно.
Чаще всего на просторах alieexpress, banggood, gearbest можно встретить более простые комплекты ZMR250 и QAV250, они, конечно же дешевле, но комплектация существенно беднее и сборка более сложная. Если провести простое сравнение то в комплекте ZMR и QAV отсутствует курсовая камера, FPV передатчик, светодиодная подсветка, а так же сборка сложнее из-за того, что у Eachine Racer 250 все контакты и разводка питания моторов/регуляторов уже распаяна на нижней части рамы, что значительно упрощает сборку. Соответственно собранная модель выглядит более презентабельно и аккуратно за счет того, что не требуется паять и прятать внутрь кучу проводов. Так что оптимальным выбором для новичка, учитывая желание собрать квадрик самостоятельно будет — Eachine Racer 250.
И так, с задачами и выбором модели мы определились. Перейдем к обзору самого комплекта. Заказ был оформлен 4 марта, передан в доставку 8 марта, и 31 марта посылка попала ко мне в руки. Доставка довольно оперативная. Номер посылки трекался на всем пути.
Коробка с запчастями была закручена в один слой изолона и упакована в простой пакет. Коробке изрядно досталось (ну никак не может наша Почта России освоить аккуратные и быстрые способы доставки).
Коробке изрядно досталось (ну никак не может наша Почта России освоить аккуратные и быстрые способы доставки). 
 Вес всей коробки 567 грамм.
Вес всей коробки 567 грамм.
Открыв коробку, видим инструкцию и кучу деталей, каждая из которых помещена в отдельный антистатический пакетик.

В комплект входит: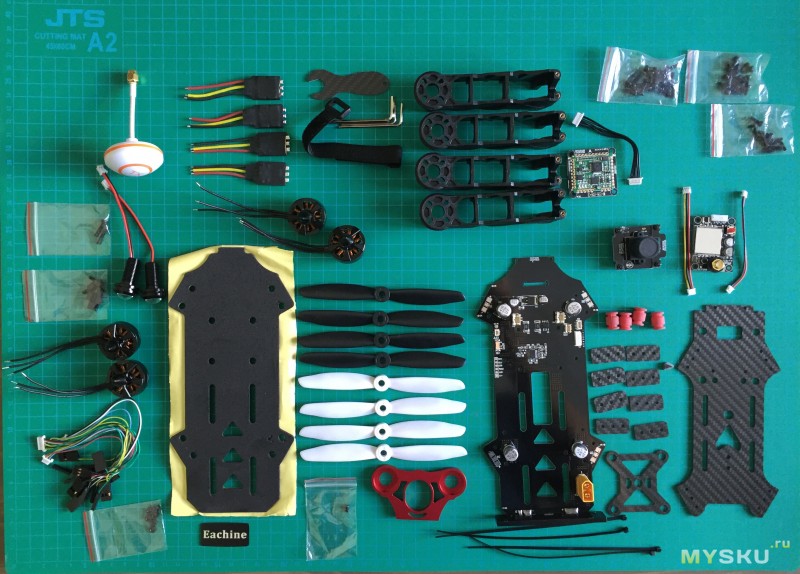
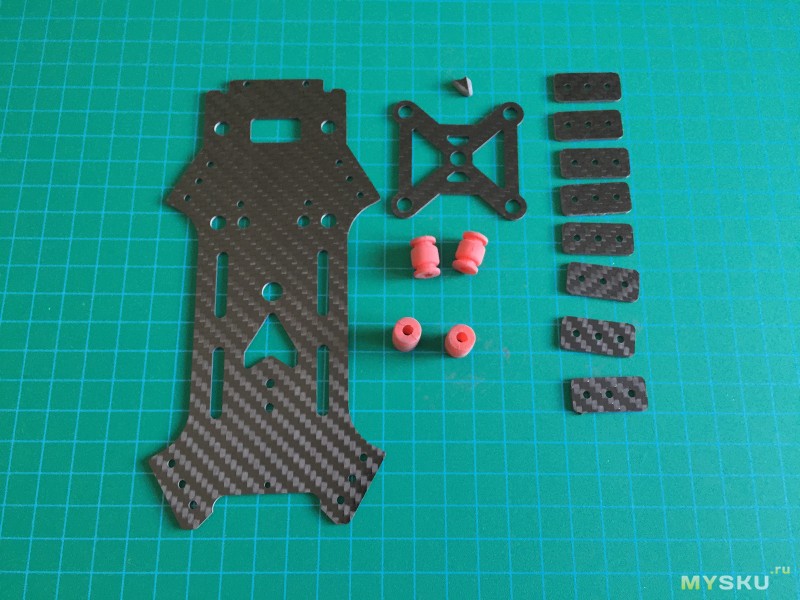
1) Рама + антивибрационная площадка для камеры
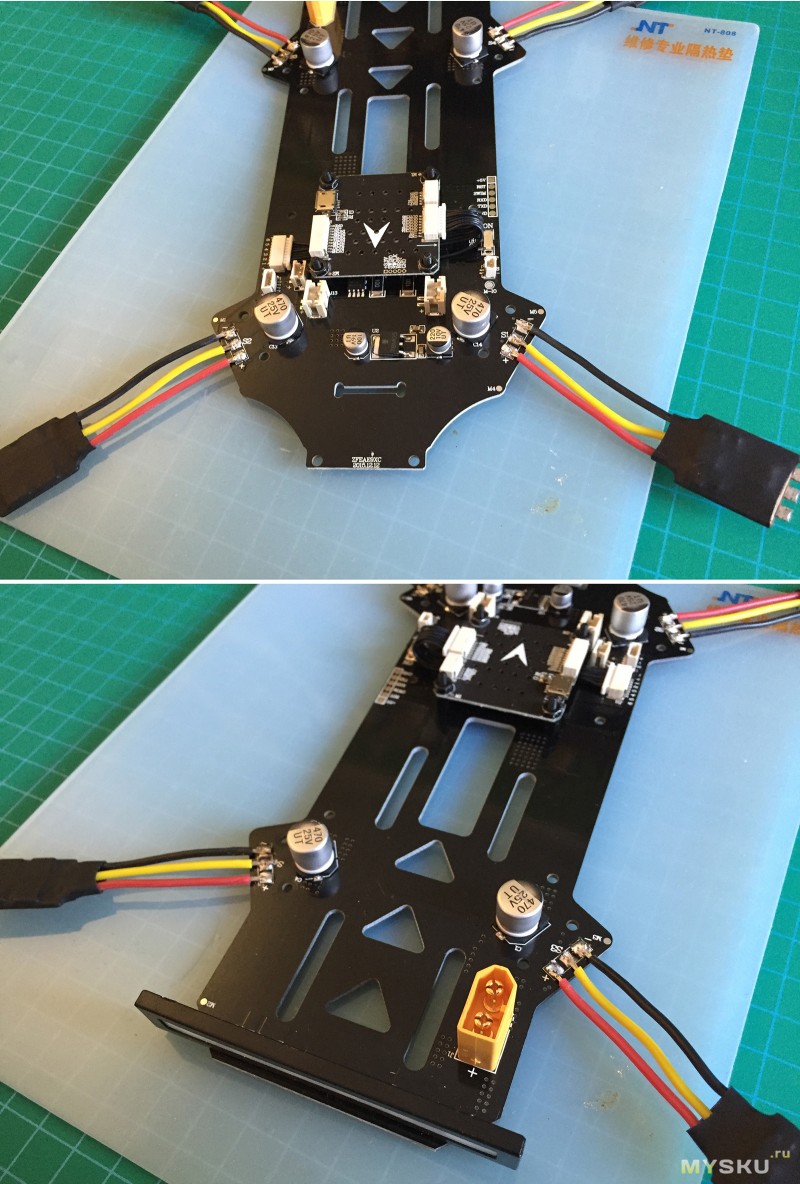
Рама состоит из нижней части, выполненной из текстолита, на которой распаяны конденсаторы и контакты для питания регуляторов и моторов, а так же есть все необходимые разъемы для подключения светодиодов и дополнительных мелочей. Верхняя часть рамы выполнена из 1мм карбона.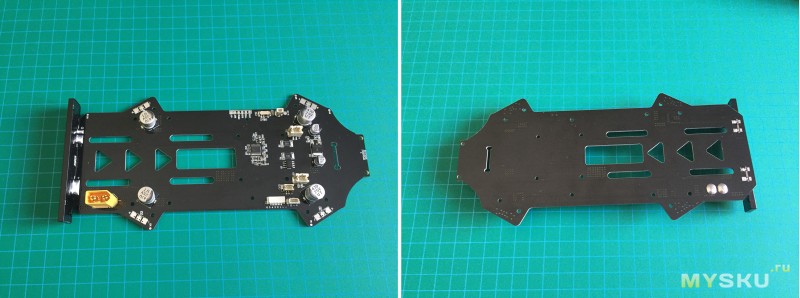
2) 4 регулятора ESC Simonk на 12А ( именно они отвечают за управление каждым мотором)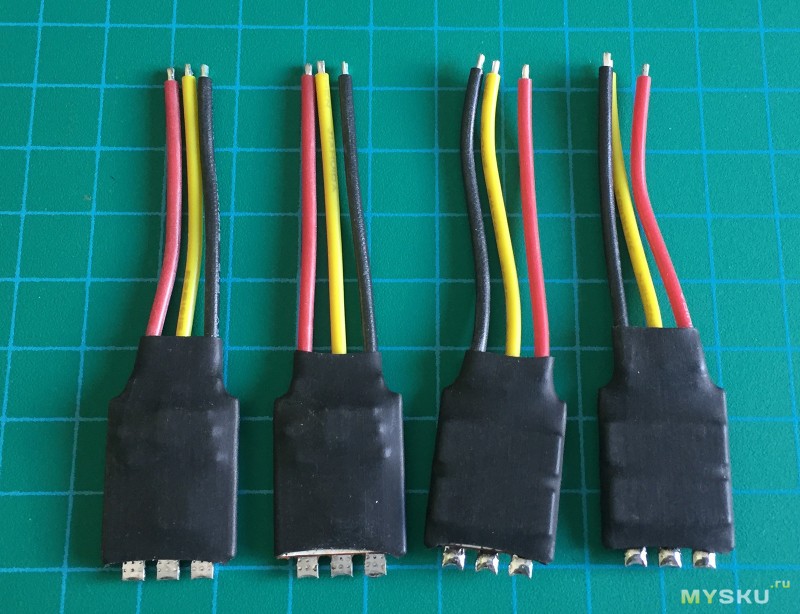
3) Контроллер управления полётом Naze32 10DOF с барометром и компасом на процессоре F1 (можно выбрать CC3D) – отвечает за управление всем квадрокоптером, говоря попросту – это его мозги.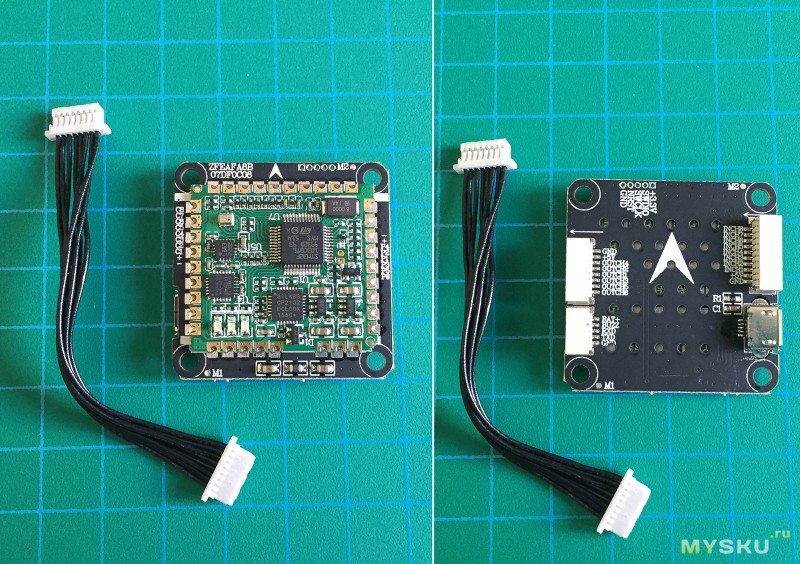
4) 4 мотора 2204 2300kv (разной направленности), под направленностью мотора обычно понимают вращение мотора обратное направлению закручивания гаек фиксации пропеллеров, CW и CCW
5) 4луча – многих смущает пластиковые ноги, но на профильных форумах некоторые обладатели обоих видов квадрокоптеров (с пластиковыми и карбоновыми лучами) пишут о том, что в практике пластиковые ноги ничуть не уступают в прочности.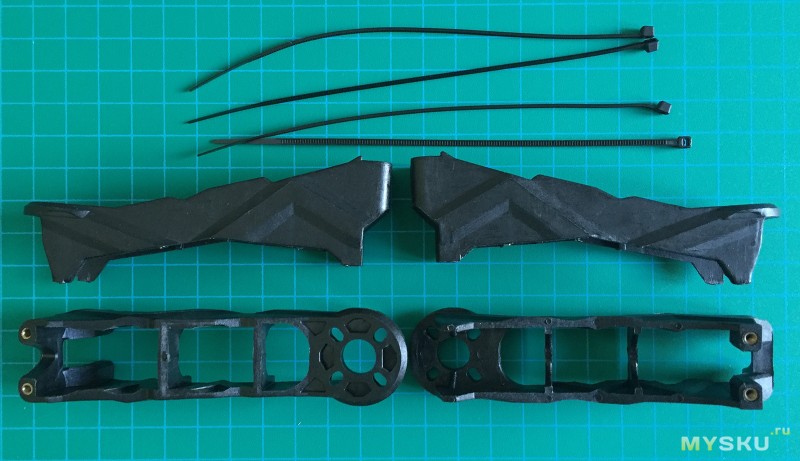
6) Голова алюминиевая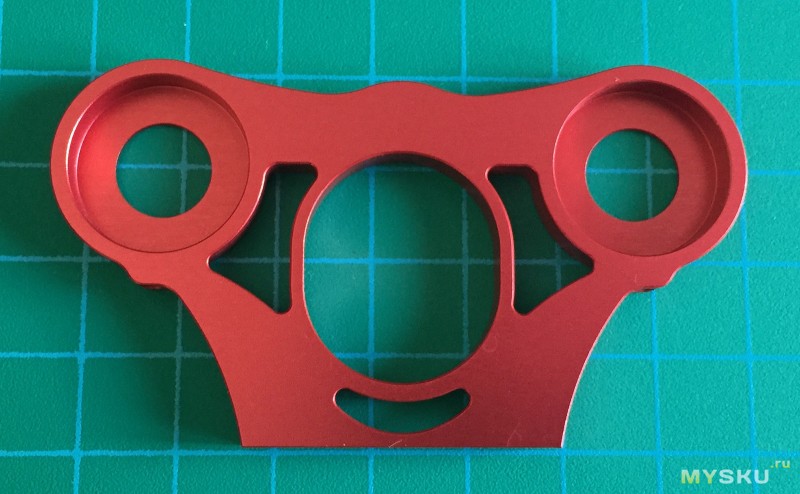
7) Передние светодиоды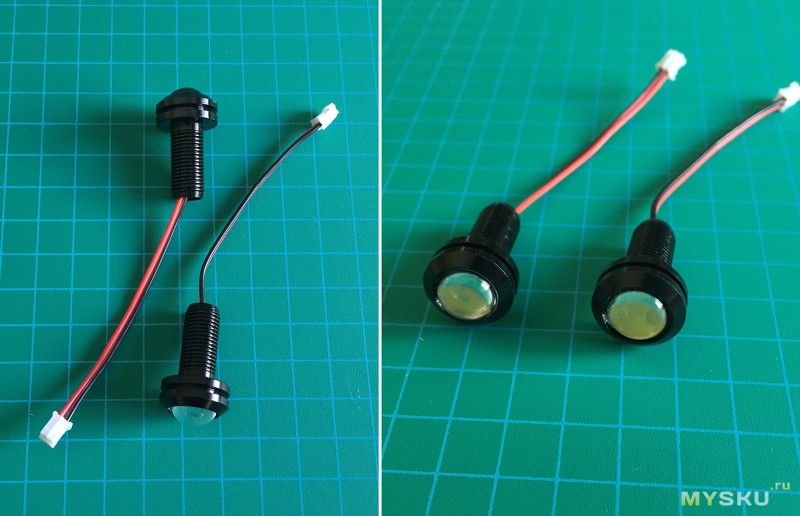
8) Курсовая камера 1000TVL — камера, не пишущая, предназначена только для ориентирования при полёте, с просмотром через видеоочки или шлем
9) Видеопередатчик 600mW 5,8G на 32 канала – предназначен для передачи видеосигнала по радиоканалу с камеры на монитор/очки/шлем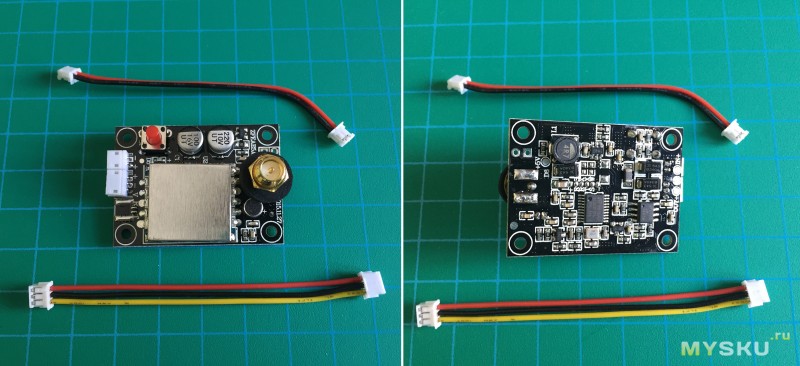
10) Антена для видеопередатчика TX «грибок». Важно!!! Нельзя подключать питание квадрокоптера без накрученной антенны на видеопередатчик!!! Очень быстро сгорает!
11) 2 комплекта винтов, размер 5045, винты жесткие, довольно хрупкие.
12) Липучка для аккумулятора, карбоновый ключ для откручивания гаек крепления пропеллеров, три шестигранных ключа необходимых для сборки
Сборка:
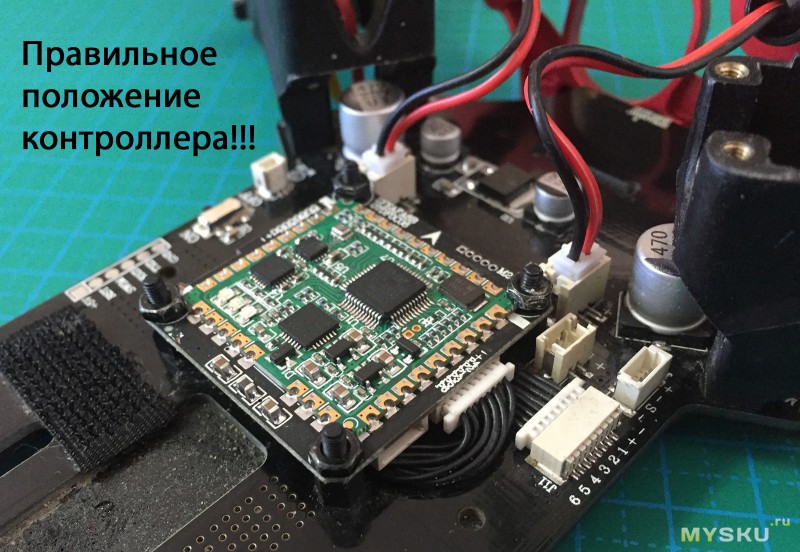
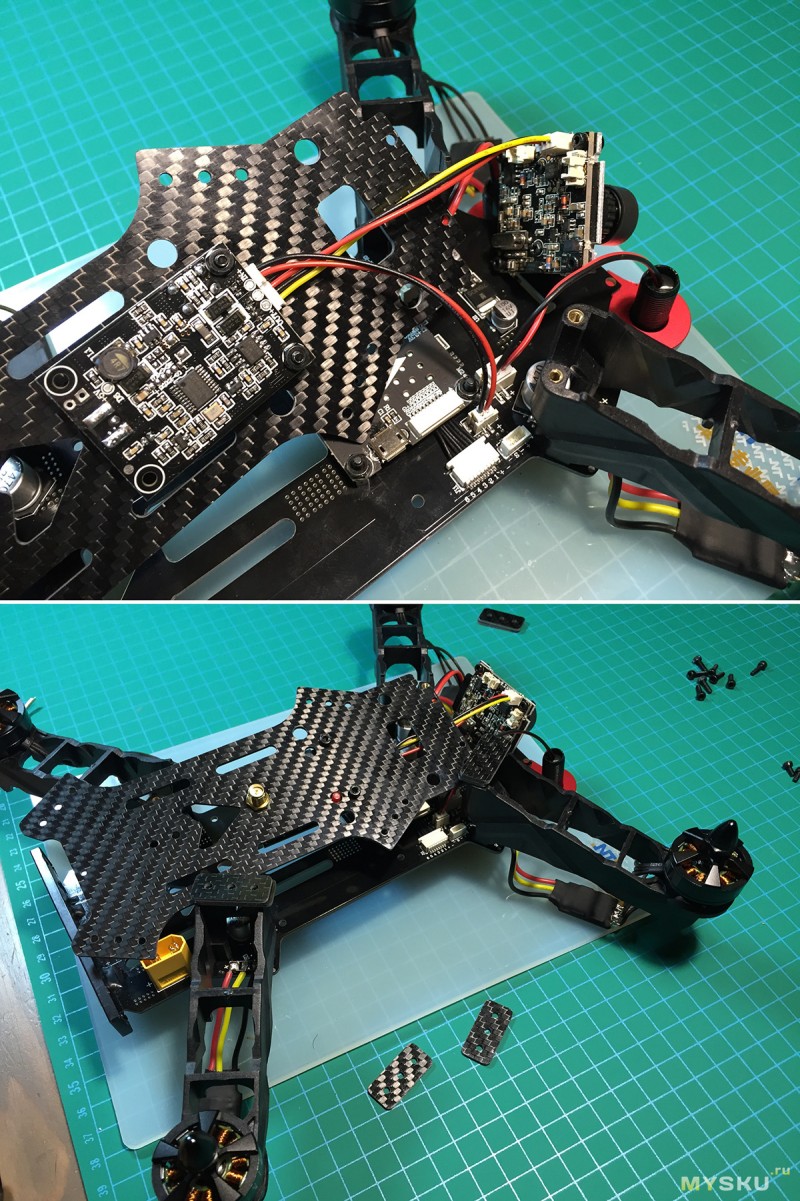
Сборку начинаем с полётного контроллера. Я изначально начал собирать квадрокоптер по инструкции, и лишь потом узнал о том, что в инструкции неверно указано положение полётного контроллера. Так что на некоторых фото будет противоречивая информация. Контроллер нужно устанавливать так, что бы micro-USB слот находился слевой стороны квадрика, стрелкой вперед. Берем наш контроллер Naze32, и крепим на него нейлоновые ножки таким образом, что бы гайки находились сверху.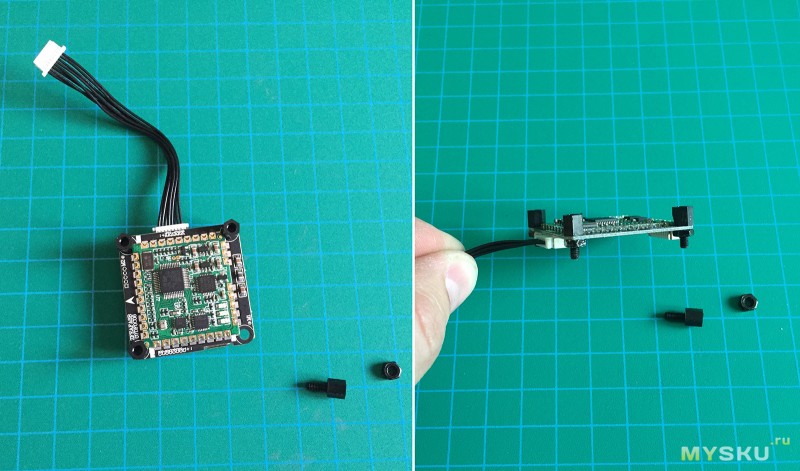
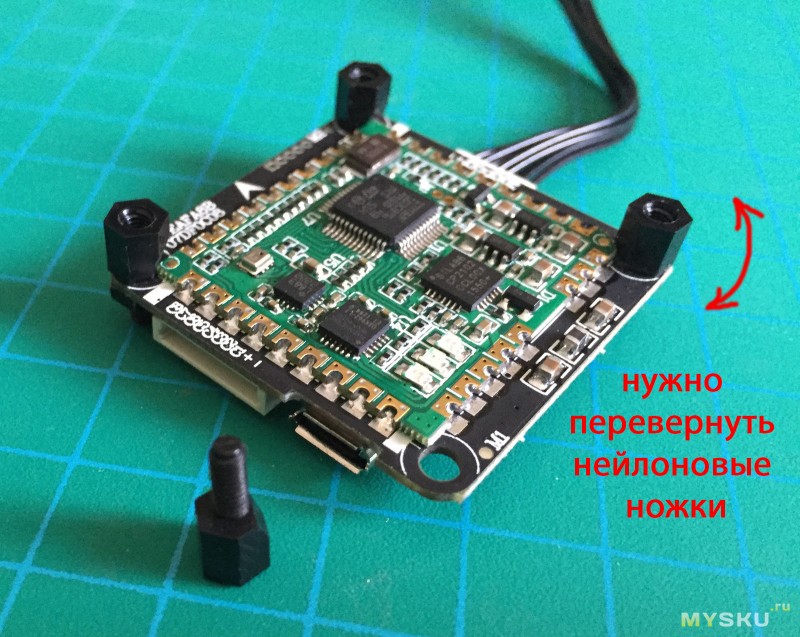 Зеленая текстолитовая плата на контроллере не позволяет ровно установить гайки для установки ножек (мешают углы), необходимо подпилить напильником. Затем подключаем комплектным проводком и устанавливаем контроллер на нижнюю часть рамы.
Зеленая текстолитовая плата на контроллере не позволяет ровно установить гайки для установки ножек (мешают углы), необходимо подпилить напильником. Затем подключаем комплектным проводком и устанавливаем контроллер на нижнюю часть рамы.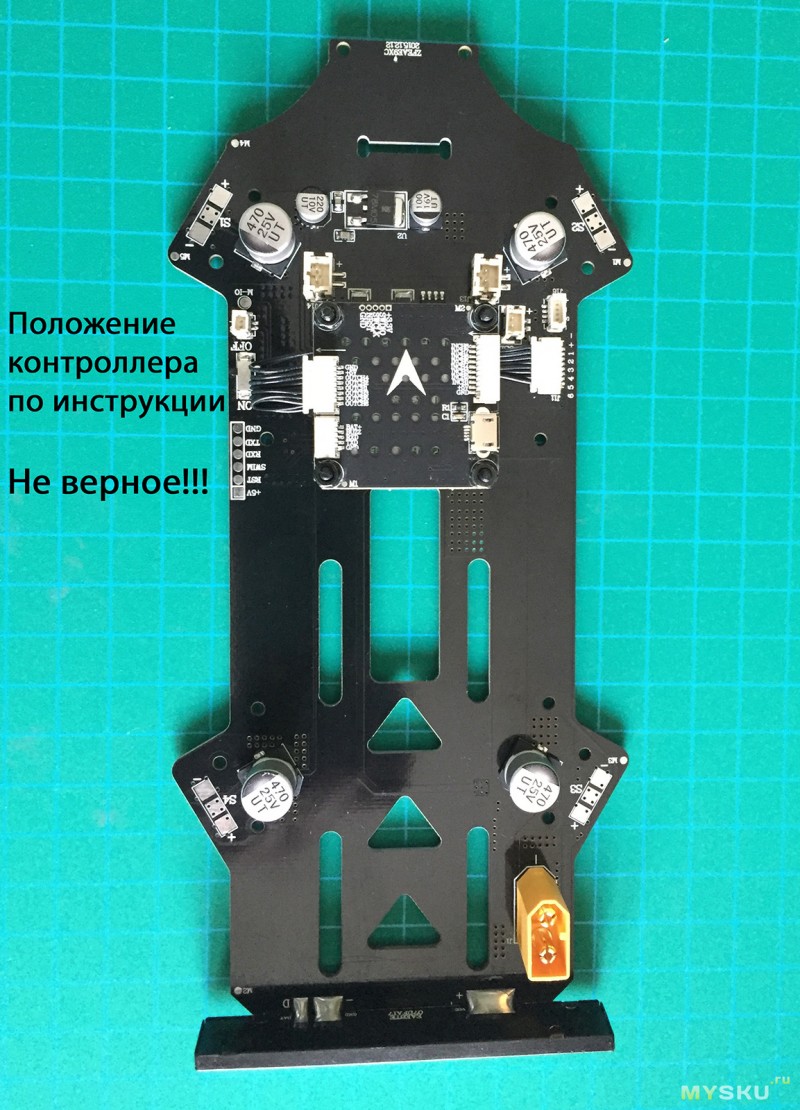
 И закрепляем полетный контроллер к нижней части рамы на 4 винта.
И закрепляем полетный контроллер к нижней части рамы на 4 винта. Далее берем «морду», устанавливаем в неё передние светодиоды и фиксируем их маленькими, потайными винтами. Крепление так себе. Держится конечно, но гораздо надежнее было бы притянуть светодиоды на гайку с обратной стороны. Недавно на муське был обзор, где собирали ходовые огни на авто из точно таких же светодиодов.
Далее берем «морду», устанавливаем в неё передние светодиоды и фиксируем их маленькими, потайными винтами. Крепление так себе. Держится конечно, но гораздо надежнее было бы притянуть светодиоды на гайку с обратной стороны. Недавно на муське был обзор, где собирали ходовые огни на авто из точно таких же светодиодов. Затем откладываем в сторону нижнюю часть рамы и берем верхнюю. К ней закрепляем видеопередатчик. Для этого откручиваем гайку с антенного разъема, берем 2 нейлоновые проставки и два винта и закрепляем передатчик к корпусу.
Затем откладываем в сторону нижнюю часть рамы и берем верхнюю. К ней закрепляем видеопередатчик. Для этого откручиваем гайку с антенного разъема, берем 2 нейлоновые проставки и два винта и закрепляем передатчик к корпусу. 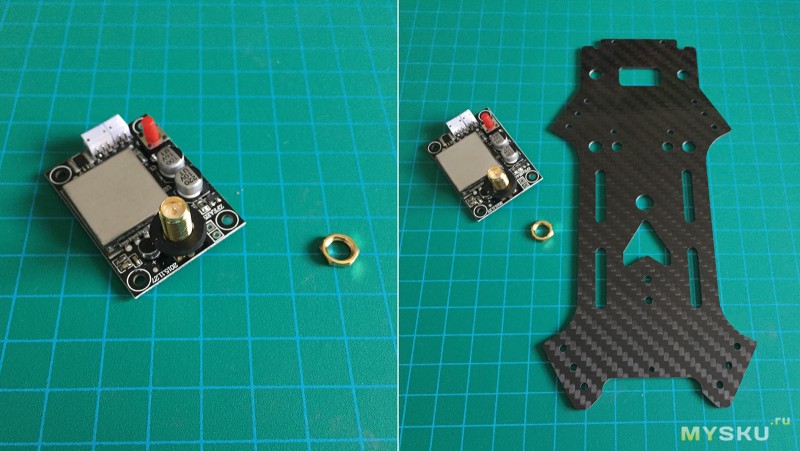
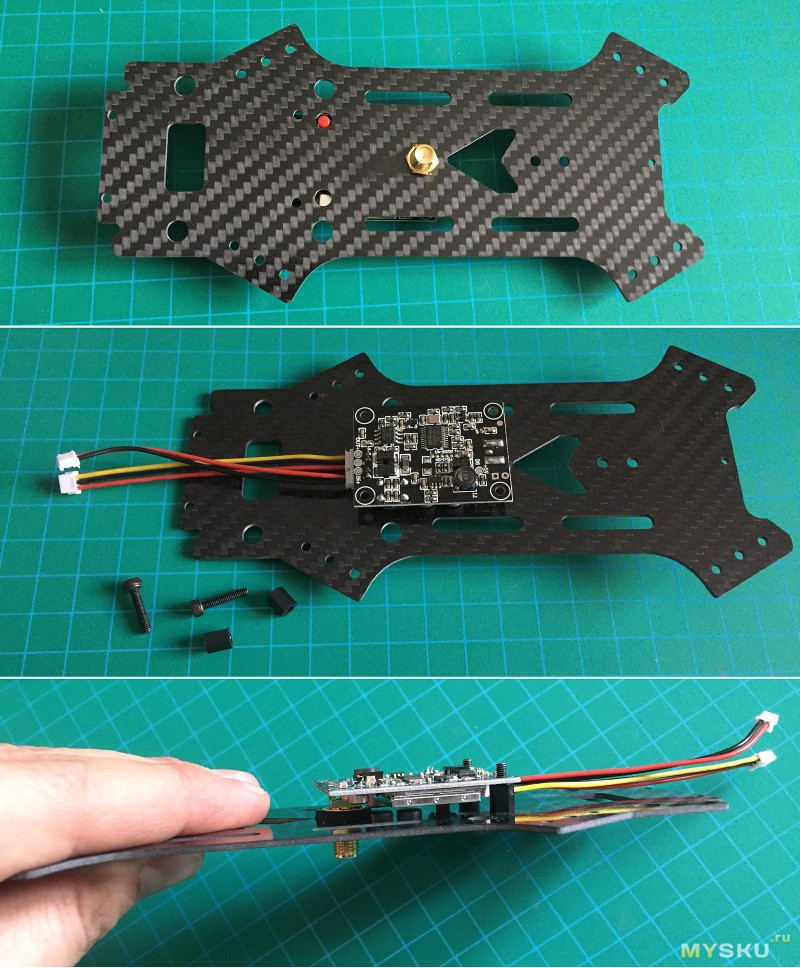
Следующим этапом будет монтаж регуляторов и подключение моторов к ним. Это единственная часть сборки, где потребуется паяльник и минимальные навыки в пайке. Контактные площадки уже все залужены, так что нам остается только припаять 12 проводков от регуляторов к раме. Не перепутайте порядок припайки проводов. На этот раз в инструкции все верно указано.
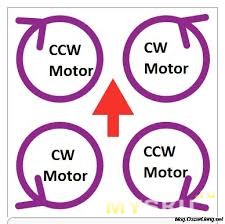
Устанавливаем моторы на «ноги» квадрика, закрепляем на винты. Порядок установки моторов: левый верхний и правый нижний по часовой (СCW), правый верхний и левый нижний против часовой (СW). Проще всего понять какой куда ставить, можно проверив в какую сторону закручивается гайка. Если по часовой, значит мотор вращается против часовой, его надо ставить справа вверху или слева внизу.
 Провода от моторов пропускаем через перегородки ног и припеваем моторы к регуляторам.
Провода от моторов пропускаем через перегородки ног и припеваем моторы к регуляторам.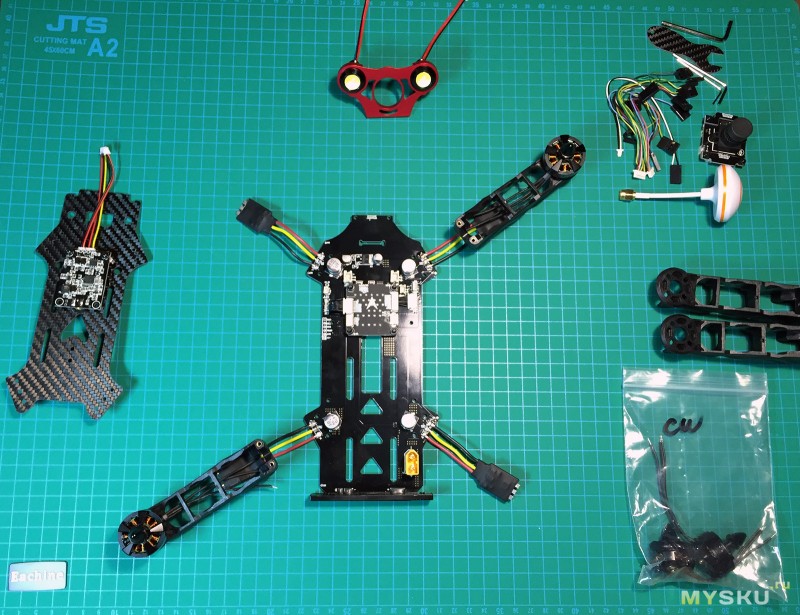
 После успешной пайки, устанавливаем «ноги» и закрепляем их нижней части рамы на 2 винта.
После успешной пайки, устанавливаем «ноги» и закрепляем их нижней части рамы на 2 винта. Устанавливаем морду, подключаем передние светодиоды. Закрепляем на винты к нижней части рамы.
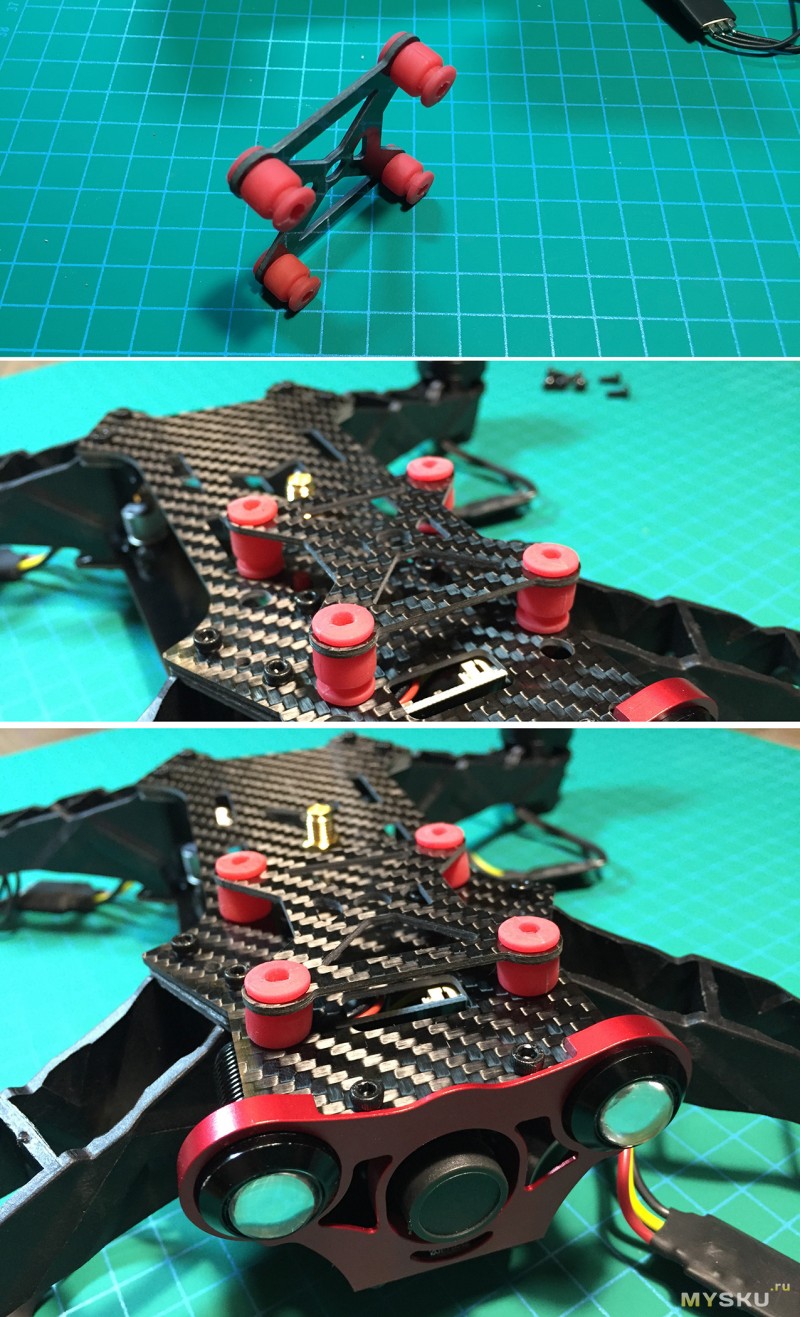
Устанавливаем морду, подключаем передние светодиоды. Закрепляем на винты к нижней части рамы.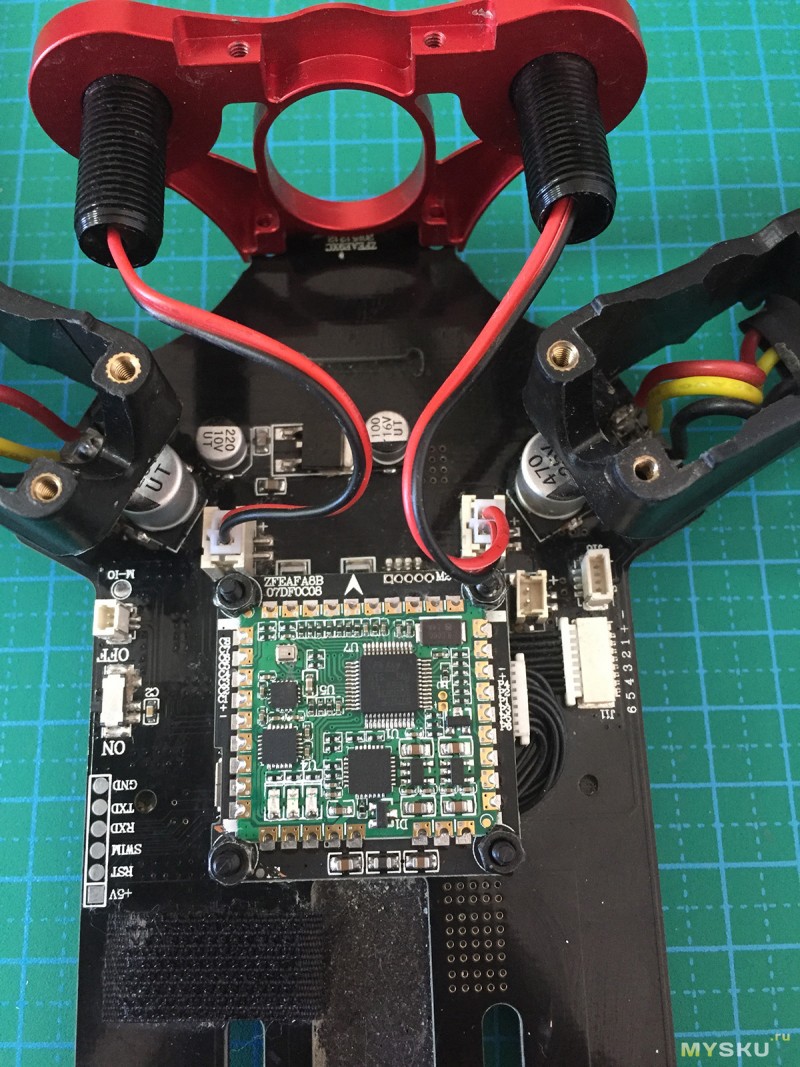 Затем берем антивибрационную площадку, «впихиваем» демпферы в отверстия площадки и верхней части корпуса. Я устанавливал площадку, после того как собрал всю раму. Пришлось помучиться. Проще устанавливать пока верхняя часть рамы не закреплена.
Затем берем антивибрационную площадку, «впихиваем» демпферы в отверстия площадки и верхней части корпуса. Я устанавливал площадку, после того как собрал всю раму. Пришлось помучиться. Проще устанавливать пока верхняя часть рамы не закреплена.
 После этого можно приступать к монтажу верхней части рамы. Для начала подключаем все разъемы видеопередатчика и камеры. Очень удобно, что все разъемы разные — нет возможности, что то перепутать и воткнуть не туда. Камеру нужно устанавливать, таким образом, что бы наиболее длинный «язычок» платы смотрел вверх. Он позволяет регулировать наклон камеры, пока не затянуты винты верхней крышки рамы.
После этого можно приступать к монтажу верхней части рамы. Для начала подключаем все разъемы видеопередатчика и камеры. Очень удобно, что все разъемы разные — нет возможности, что то перепутать и воткнуть не туда. Камеру нужно устанавливать, таким образом, что бы наиболее длинный «язычок» платы смотрел вверх. Он позволяет регулировать наклон камеры, пока не затянуты винты верхней крышки рамы.
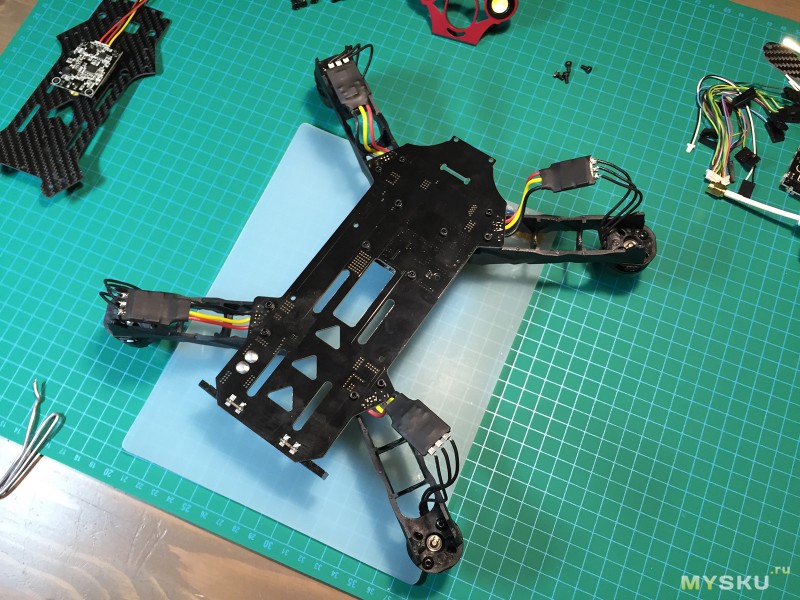
 Затем берем карбоновые проставки, и прикладываем их на верхнюю часть лучей. И сверху укладываем верхнюю часть рамы. Ищем такое положение, что бы отверстия под винты в раме и поставках совпадали и закручиваем винты.
Затем берем карбоновые проставки, и прикладываем их на верхнюю часть лучей. И сверху укладываем верхнюю часть рамы. Ищем такое положение, что бы отверстия под винты в раме и поставках совпадали и закручиваем винты.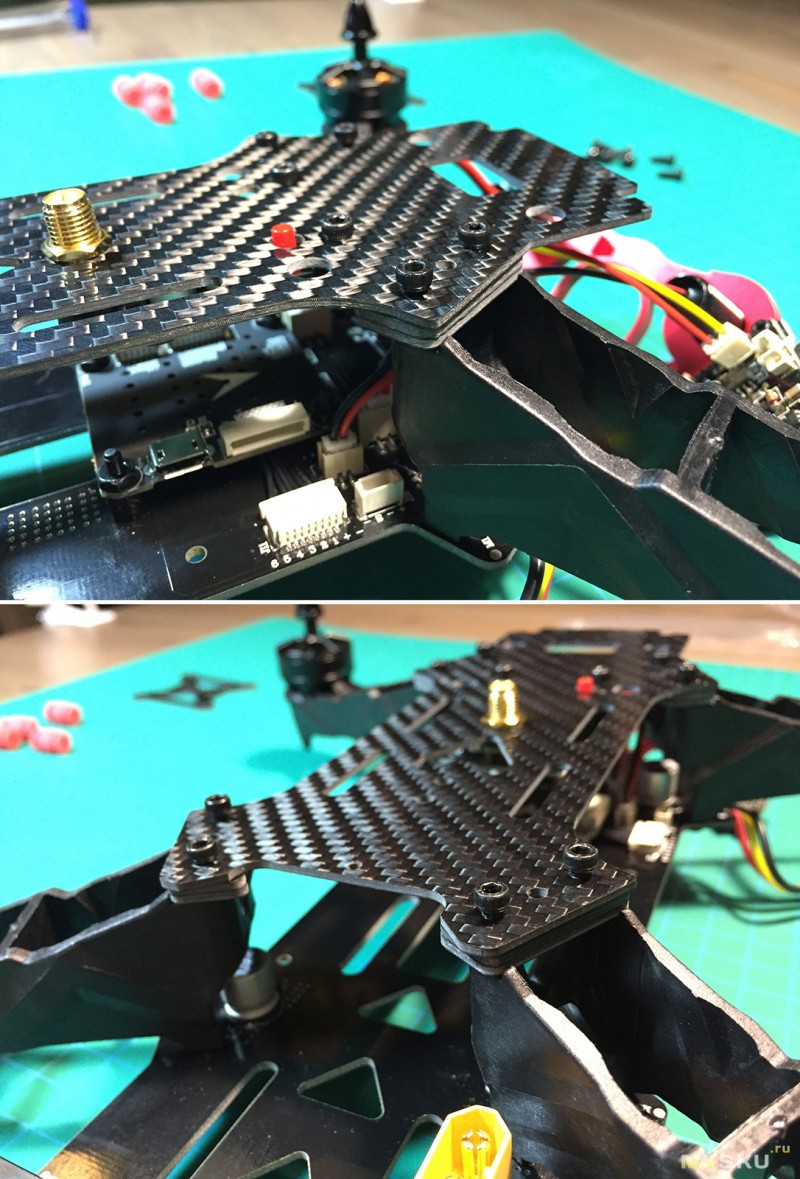 Почти готово. Берем остатки винтов и закручиваем.
Почти готово. Берем остатки винтов и закручиваем. 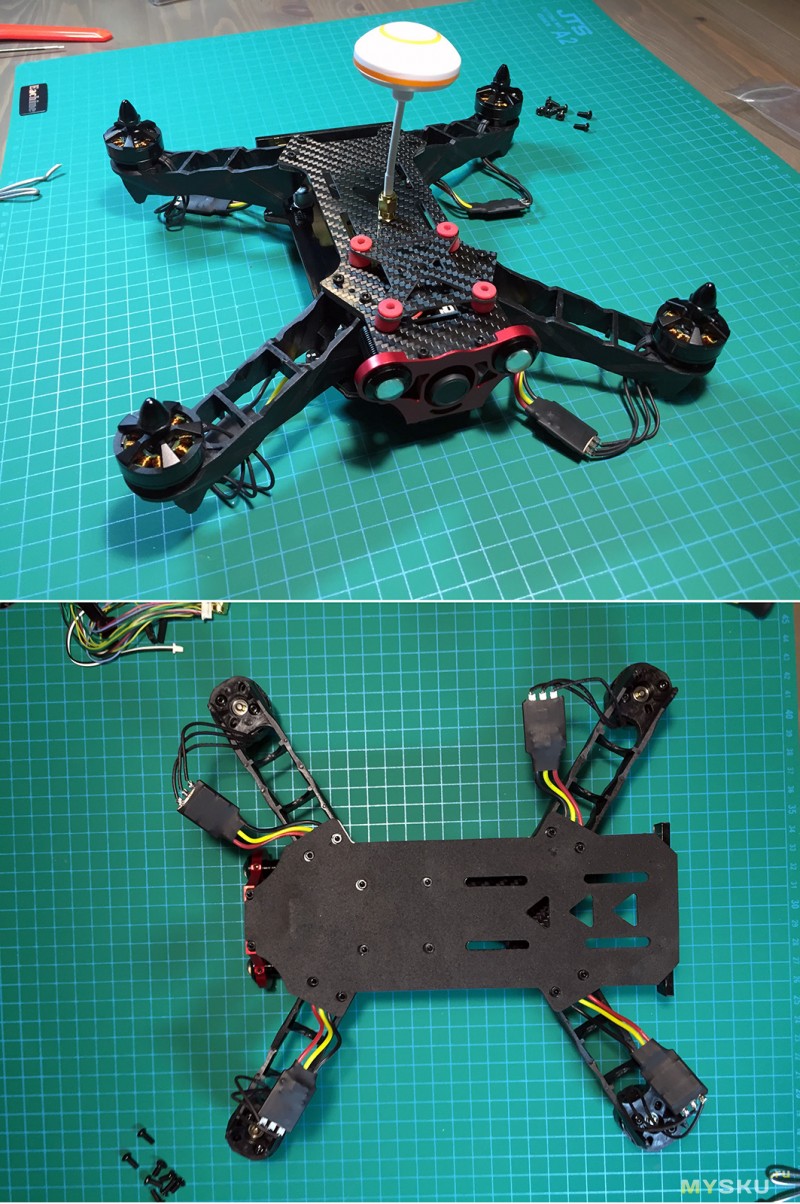 Квадрокоптер собран. Наводим косметику. Прячем лишние провода и закрепляем регуляторы в ноги при помощи нейлоновых стяжек
Квадрокоптер собран. Наводим косметику. Прячем лишние провода и закрепляем регуляторы в ноги при помощи нейлоновых стяжек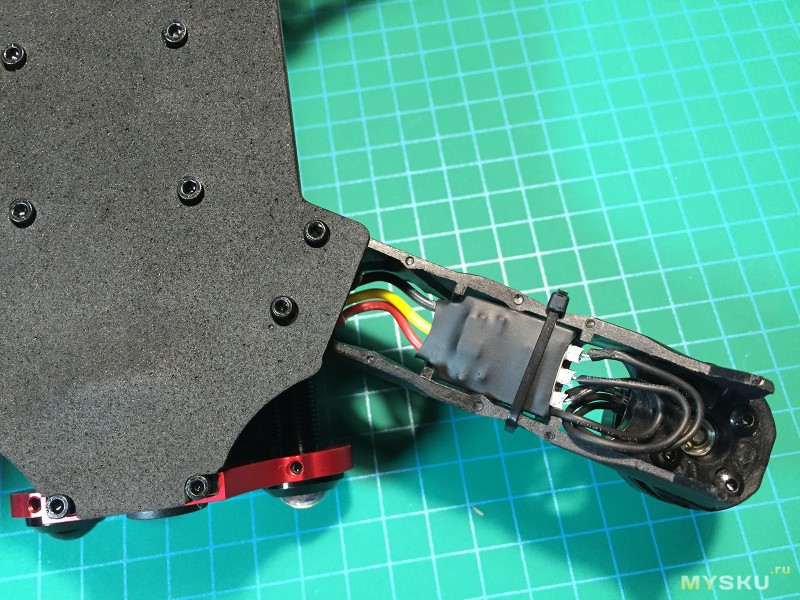 Готово. Сборка закончена.
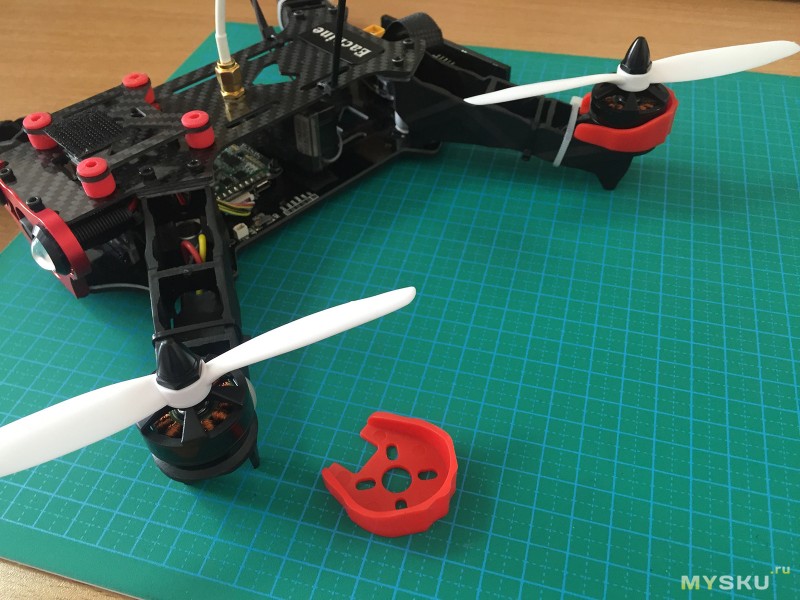
Готово. Сборка закончена. 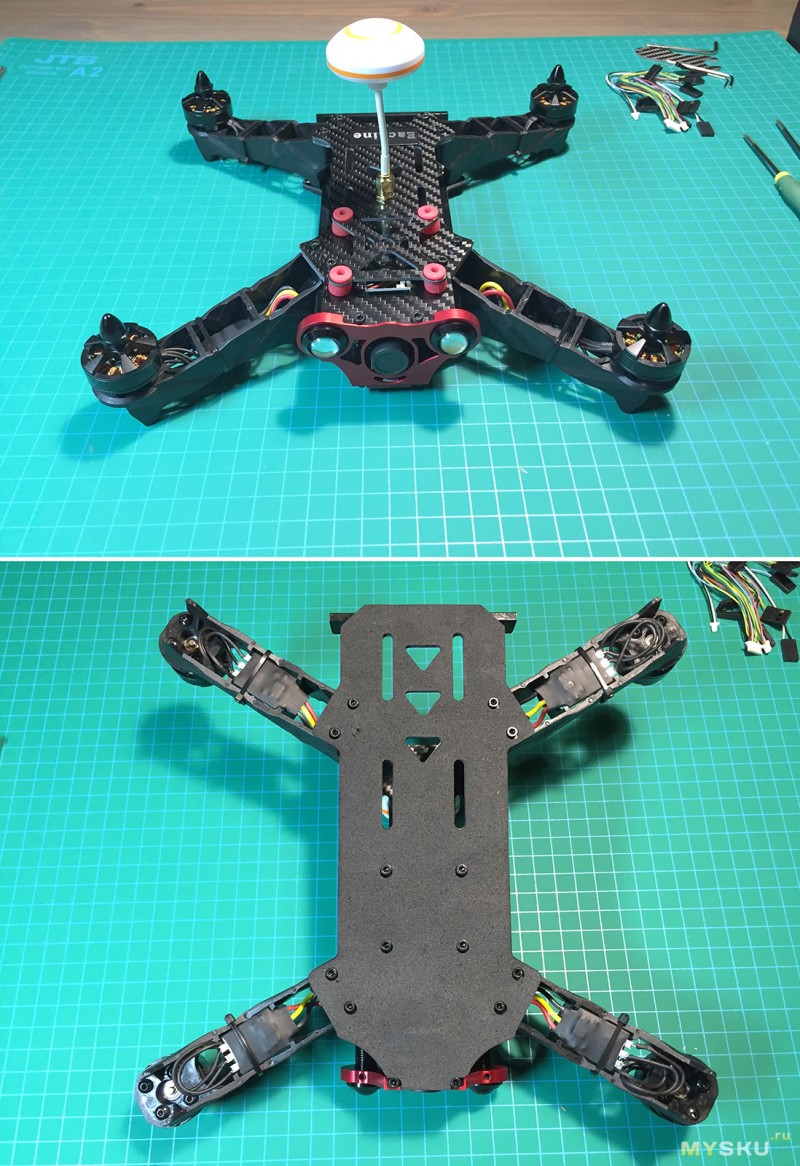 Общий вес квадрокоптера, с установленной защитой, приставкой под аккумулятор и с аккумулятором составил 550 грамм
Общий вес квадрокоптера, с установленной защитой, приставкой под аккумулятор и с аккумулятором составил 550 грамм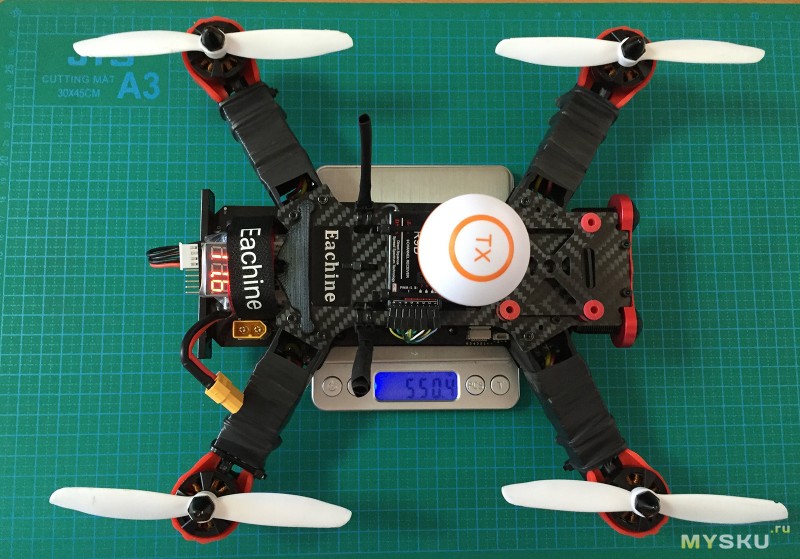
Следующий этап, обновление, прошивка и настройка полётного контроллера. Для этого нам понадобится любой компьютер с доступом в интернет. Скачиваем приложение Cleanflight Configurator для Google Chrome. Запускаем. Откроется основное окно программы, и первым делом мы скачиваем драйвер CP210x Driver для подключения квадракоптера к компьютеру.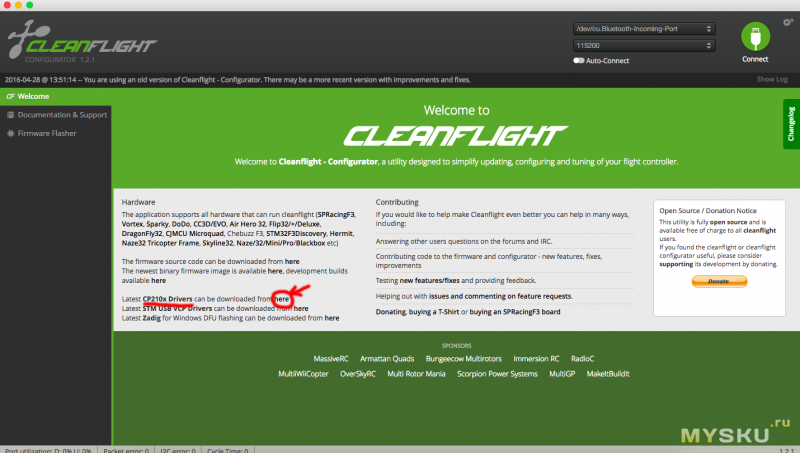 Берем квадрокоптер и USB провод для подключения к компьютеру, подключаем и нажимаем зеленую кнопку «Connect» в правом верхнем углу. Открывается окно настройки полетного контроллера.
Берем квадрокоптер и USB провод для подключения к компьютеру, подключаем и нажимаем зеленую кнопку «Connect» в правом верхнем углу. Открывается окно настройки полетного контроллера.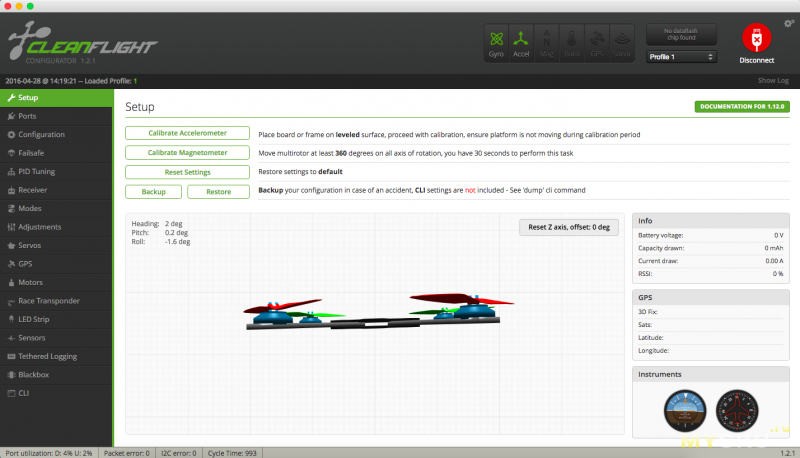 После того как у нас успешно получилось подключить квадрик к компьютеру, переходим к этапу обновления прошивки. Прошивок существует несколько: openpilot, cleanflight, betaflight… Тут надо пробовать и выбирать оптимальную для себя. Мы же разберем вариант для новичков, — более популярную и стабильную версию Betaflight от Бориса… для этого переходим на сайт и скачиваем актуальную прошивку. Всегда советуют скачивать предпоследний вариант прошивки, как более стабильный и рабочий. Скачиваем Betaflight 2.6.0 «betaflight_2.6.0_NAZE.hex», запоминаем расположение файла. Снова запускаем Cleanflight (квадрокоптер подключен к компьютеру), и не нажимая кнопку «Connect», в меню левой части экрана выбираем «Firmware Flasher» (1) и нажимаем на иконку в правой, нижней части экрана «Load Firmware (Local)» (2) — указываем путь к файлу прошивки, которую мы скачали ранее. Затем нажимаем Flash Firmware (3). И ждем окончания прошивки. (4) Вся процедура занимает меньше минуты.
После того как у нас успешно получилось подключить квадрик к компьютеру, переходим к этапу обновления прошивки. Прошивок существует несколько: openpilot, cleanflight, betaflight… Тут надо пробовать и выбирать оптимальную для себя. Мы же разберем вариант для новичков, — более популярную и стабильную версию Betaflight от Бориса… для этого переходим на сайт и скачиваем актуальную прошивку. Всегда советуют скачивать предпоследний вариант прошивки, как более стабильный и рабочий. Скачиваем Betaflight 2.6.0 «betaflight_2.6.0_NAZE.hex», запоминаем расположение файла. Снова запускаем Cleanflight (квадрокоптер подключен к компьютеру), и не нажимая кнопку «Connect», в меню левой части экрана выбираем «Firmware Flasher» (1) и нажимаем на иконку в правой, нижней части экрана «Load Firmware (Local)» (2) — указываем путь к файлу прошивки, которую мы скачали ранее. Затем нажимаем Flash Firmware (3). И ждем окончания прошивки. (4) Вся процедура занимает меньше минуты.
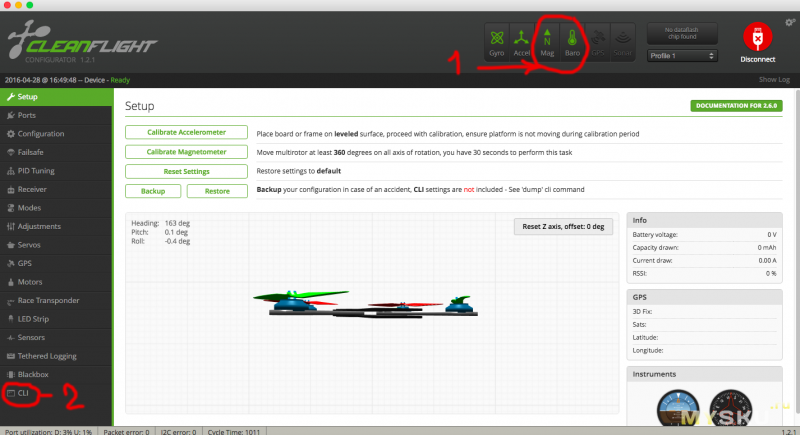
После успешной прошивки, первым делом — отключаем компас и барометр (1) (на версии с контроллером CC3D их нет). Не знаю как у других, но у меня со включенным компасом и барометром квадрокоптер непредсказуем. Может повернуть самостоятельно, закрутиться по рудеру, или вообще перевернуться. Долго не мог понять почему он себя так ведет, выход нашелся, но не сразу. Для отключения переходим во вкладку (2) «CLI»
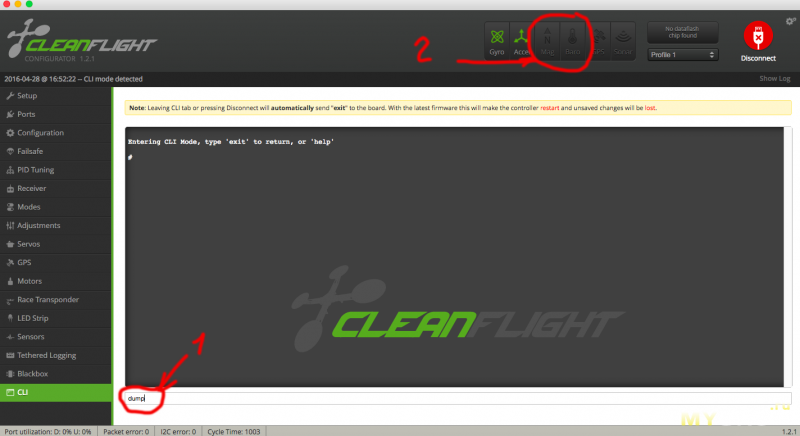
 В нижней строке поочерёдно вводим следующие команды:
В нижней строке поочерёдно вводим следующие команды:
1) set baro_hardware = NONE
2) set mag_hardware = NONE
и сохраняем изменения командой
3) save
После ввода команды «save» полётный контроллер должен перегрузиться и в верхней части экрана (2) перестанут светиться компаса и барометра.
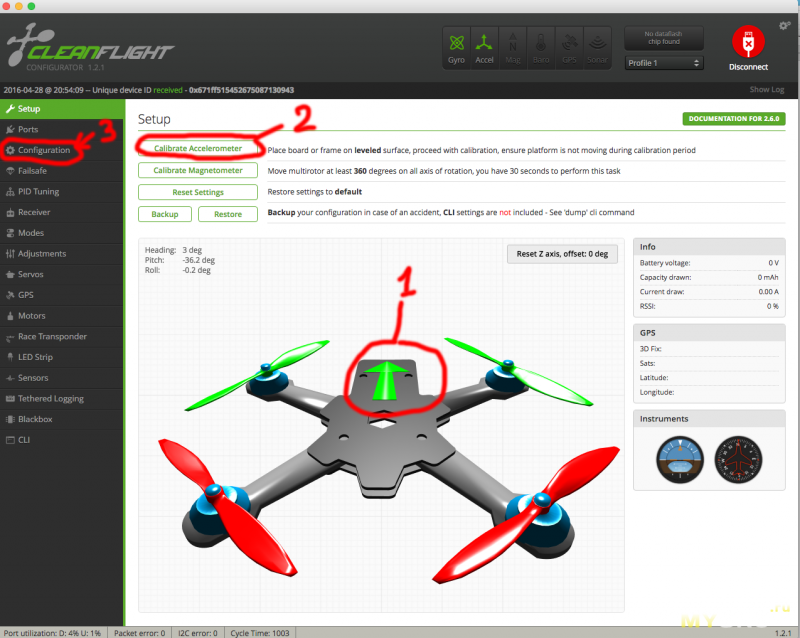
Переходим к следующему этапу настройки. В первой вкладке «Setup» проверяем правильность работы акселерометра, т.е. правильно ли полетный контроллер определяет положение квадрокоптера в пространстве. Для этого наклоняем квадрокоптер в разные стороны и изображение на экране компьютера должно соответствовать наклону квадрокоптера. На экране перед квадрокоптера обозначен большой зеленой стрелкой (1). Если все движения квадрокоптера соответствуют изображению на экране, то затем мы устанавливаем квадрокоптер на ровную поверхность и нажимаем кнопку (2) «Calibrate Accelerometer», после успешной калибровки переходим во вкладку (3) «Configuration» (Если движения квадрокоптера не соответствуют изображению, то нам нужно будет программно задать другое расположение полетного контроллера, об этом чуть ниже)
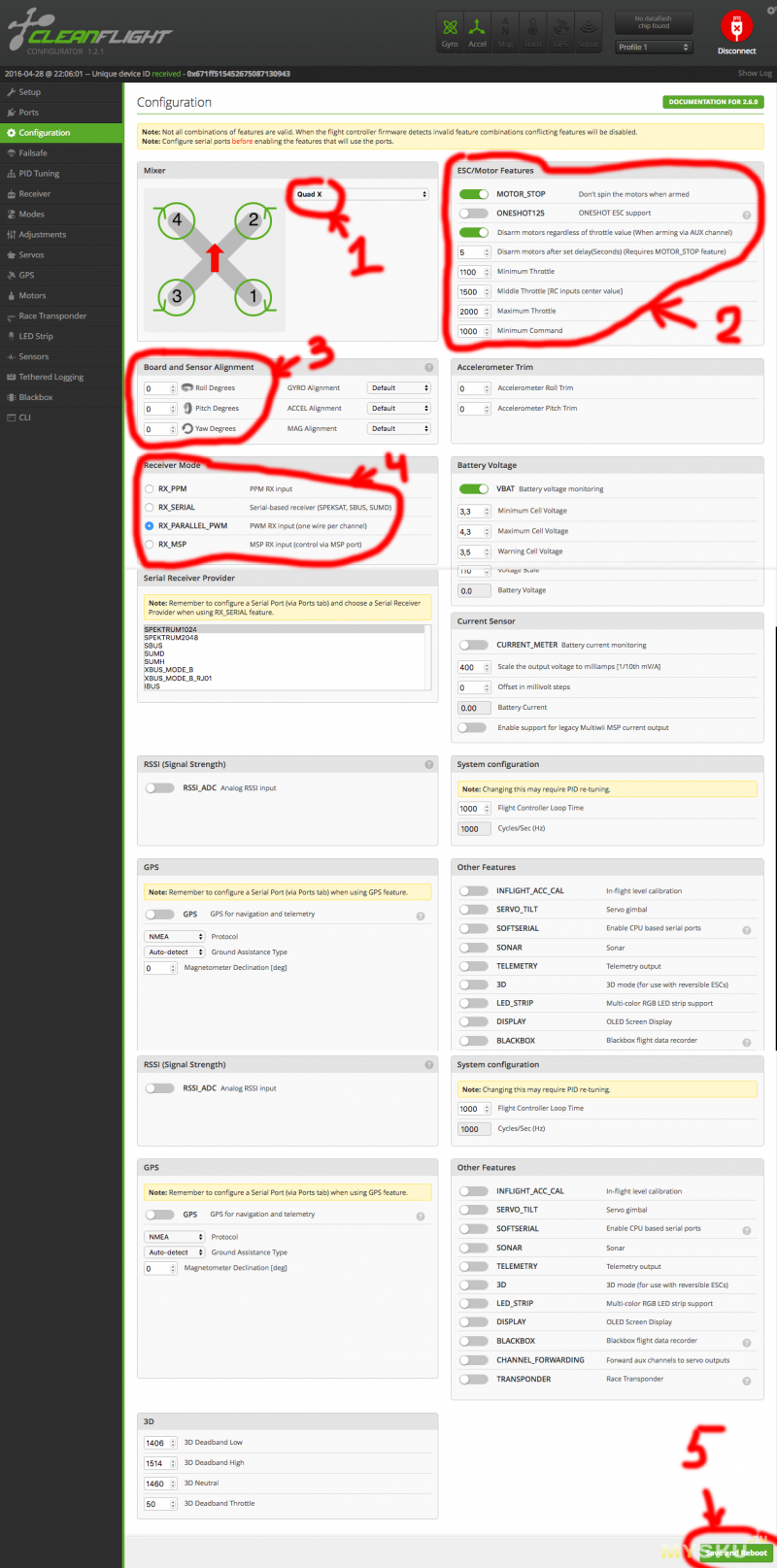
Здесь мы видим основные настройки:
1) Первое, что стоит выбрать — это тип нашего квадрокоптера, и еще раз проверить что бы схема вращения моторов совпадала с нашей.
2) Пункт настройки моторов, здесь мы задаем минимальный/максимальный газ и настраиваем блокировку моторов.
MOTOR_STOP — блокировка моторов при арминге, т.е. когда вы соединяете пульт управления с квадрокоптером, в активированном режиме ваши моторы не будут вращаться. Если ползунок снять, то при соединении апы буду запускаться моторы на минимальном газе.
ONESHOT125 — на наших регуляторах не работает. Если не ошибаюсь, то это технология высокоскоростного обмена данными между контроллером и регуляторами моторов.
Minimum Throttle — минимальное значение газа, важно что бы это значение было больше значения, при котором моторы начинают вращаться. Определить минимальное значение начала вращения моторов можно во вкладке «Motors», но об этом чуть ниже.
Middle Throttle — среднее значение газа, устанавливаем 1500.
Maximum Throttle — максимальное значение газа, устанавливаем 2000.
3) Если у вас акселерометр не правильно отображал положение квадрика на экране ПК (квадрокоптер на изображении перевернут, или его стороны инвертированы), то как раз в этом меню можно программно поменять положение квадрокоптера. Для этого экспериментальным методом тыка пробуем заменить угол так, что бы положение квадрокоптера соответствовало изображению на экране.
4) Меню выбора способа, которым вы подключаете передатчик аппаратуры управления. В данном комплекте, с полезным контроллером, шел провод только для подключения по PWM (т.е. каждый канал передается по отдельному проводку). По PWM подключается нормально, работает! Но все, почему-то любят подключаться по SBUS. Адаптер для подключения по SBUS (все каналы идут по 3 проводам) надо покупать отдельно.
5) Обязательно нажимаем кнопку «SAVE and Reboot» — для сохранения всех изменений.
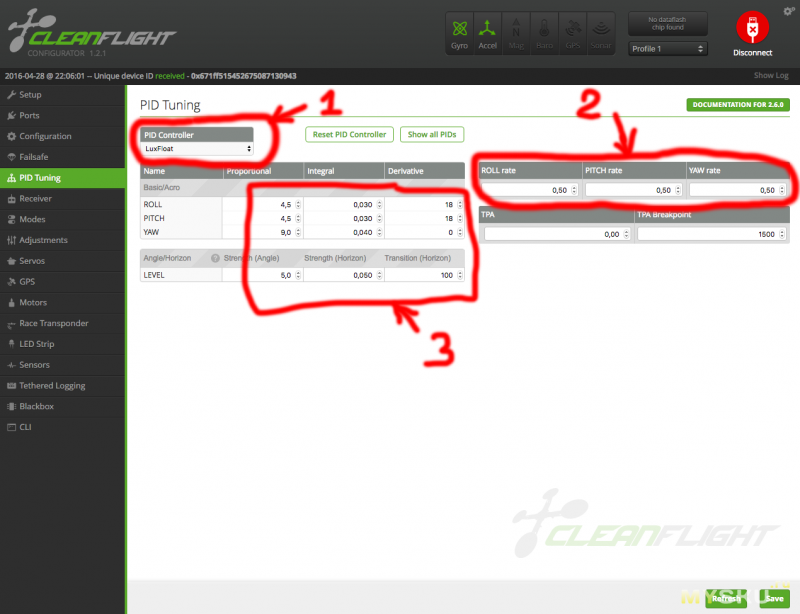
Следующий пункт «PID Tuning» — для настройки пидов. Вещь очень непонятная и самая сложная. Все регулярно их меняют, спорят о настройках и у каждого они свои. Если говорить простым языком — то это настройка стабильности полета.
1) выбираем LuxFloat — как наиболее стабильную и не требующую изменений.
2) Roll rate — это настройка чувствительности ваших стиков. Вещь довольно индивидуальная. Кому как удобней. Для начала оставляем по умолчанию, пробуем и правим в нужную сторону.
3) Настройка самих пидов. Для начала летаем по умолчанию и по мере освоения навыков управления, все больше читаем про эти самые пиды и настраиваем под себя. В варианте «из коробки» и по умолчанию квадрик летает, не идеально стабильно конечно (присутствует и «болталка» и покачивания и т.д.), но для обучения пойдет.
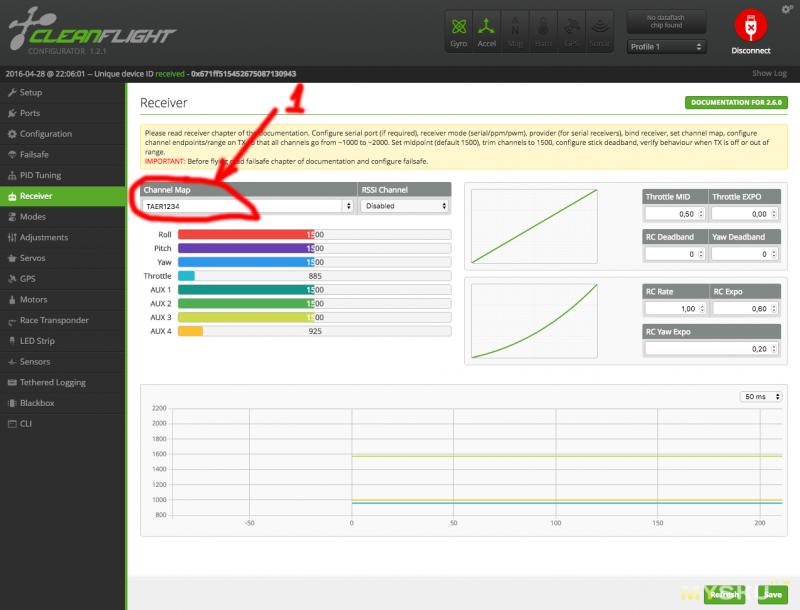
Следующий пункт Receiver — настройка подключения аппаратуры.
1) Выбираем тип нашей аппаратуры. Главное — выбрать тот тип, что бы движение стика газа соответствовало ползунку Throttle. И второй нюанс — включаем аппаратуру, выставляем оба стика в центральное положение и первые 4 значения должны быть равны 1500, а в крайних положениях 1000 и 2000 соответственно (это выстраивается в меню самой аппаратуры в пунктах «Sub-Trim» и «End-Point». И затем настраиваем остальные каналы на разные переключатели для переключения режимов, арминга и т.д. Так как аппаратура у всех разная, то подробную настройку можно найти на Youtube.
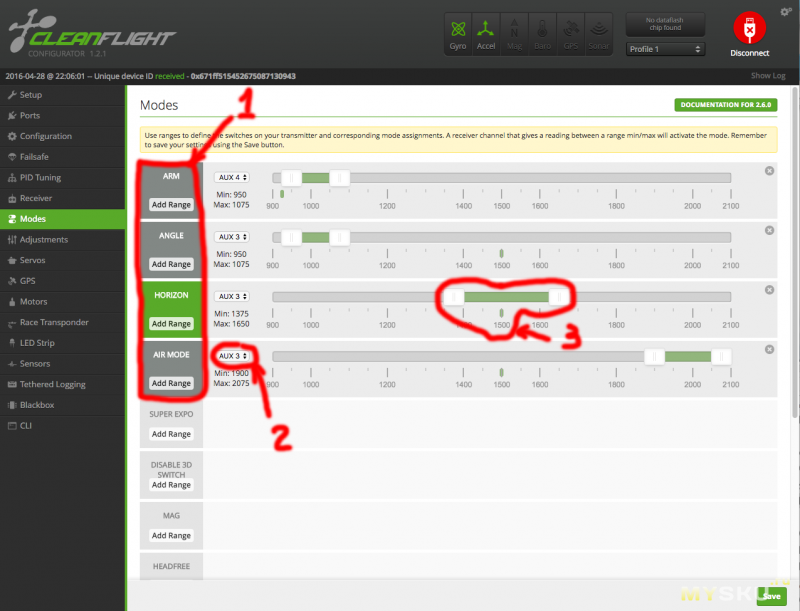
Далее вкладка «Modes» — это настройка переключения полетных режимов. Без этой настройки не удастся запустить двигатели.
ARM — арминг (соединение аппаратуры с квадрокоптером). Я настроил арминг на отдельный, двухпозиционный переключатель (у меня — канал 4).
ANGLE — самый простой режим стабилизации. Очень плавный. Рекомендуется для новичков. А так же его включают при посадке, для плавного спуска и приземления. Я выставил на 3 канал (трехпозиционный переключатель, в нижнее положение).
HORIZON — тоже довольно стабильный и плавный режим, но уже немного пореще и позволяет делать флипы (удерживая правый стик в одну из сторон). Выставил на тот же 3 канал (трехпозиционный переключатель, в среднее положение)
AIR MODE — более продвинутый режим, многие летают в нем. Максимальная стабилизация в независимости от положения газа. Мне пока сложно. Выставил на 3 канал (трехпозиционный переключатель, в верхнее положение, но пока не пользуюсь)
ACRO — режим для опытных пилотов, включен по умолчанию, т.е. если отключить все наши режимы — то как раз таки и получим ACRO. Новичкам не советую. Квадрик становится резким и быстрым.
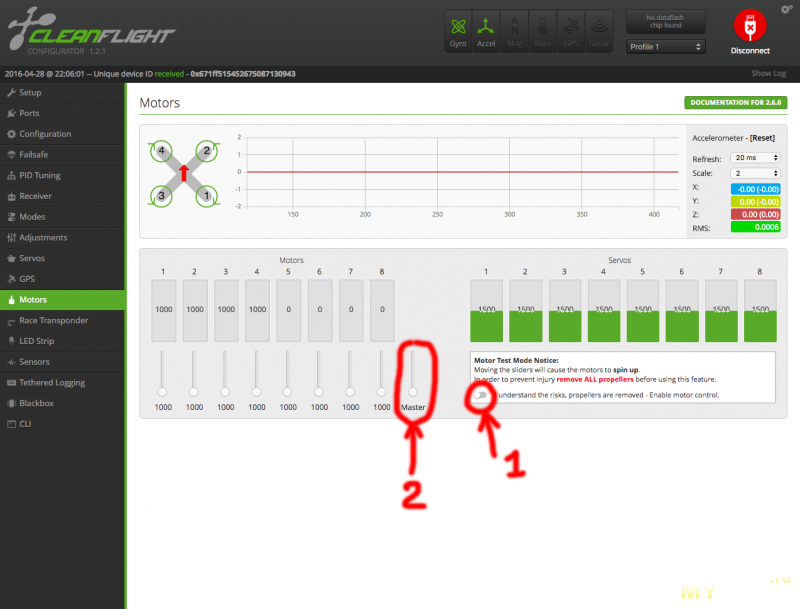
И последний, нужный нам, пункт настройки — это Motors. Здесь мы можем посмотреть минимальное значение при котором начинают вращаться моторы (для пункта Configuration), а так же можем откалибровать все моторы.
Для калибровки моторов первым делом снимаем все лопасти с моторов!!! ВАЖНО! если не снять — возможны травмы. Затем активируем (1) ползунок. Поднимаем общий (2) ползунок моторов вверх. Подключаем аккумулятор к квадрокоптеру. Раздастся короткий сигнал, затем опускаем ползунок (2) вниз, раздастся обычный сигнал включения квадрокоптера. После этого медленно поднимаем (2) ползунок вверх. При этом моторы начнут крутится. Поднимаем до максимального значения и отпускаем вниз. Калибровка завершена. Тут же, ползунком каждого мотора — можно посмотреть значение запуска мотора.
Сохраняем еще раз все настройки и отключаем квадрокоптер. После этого устанавливаем пропеллеры, подключаем аккумулятор и можно переходить к первому полету.
Полёт.
Честно говоря, я не думал что он такой мощный. У меня уже есть пару квадриков (Cheerson CX-10, Tarantula 1505), но по сравнению с ними это просто монстр. Это как сравнивать жигули с двигателем 1,5 литра с каким нибудь Ferrari. При первом пуске адреналин зашкаливал. Он очень резкий. Даже в режиме ANGLE. Потребуется не один десяток полетов, что бы привыкнуть и научиться летать. На видео запечатлен первый пробный полет, ничего выдающегося, просто факт того, что он летает) Погода у нас еще не лётная, на открытых полях еще снега по колено.
Летать конечно же нужно на открытом пространстве, за чертой города. Что бы исключить падение квадрокоптера кому-нибудь на голову. А падать первое время будем — очень часто. Чаще всего из страха «улетания» квадрокоптера обратно в Китай. В связи с этим настоятельно рекомендуется покупка следующих запчастей:
1) Запасных лопастей. Покупать желательно сразу пар 10-20. Ломаются они очень часто. Подходят лопасти размера 5040 и 5045 (в комплекте были 5045, я такие же и купил). На форумах советуют покупать лопасти KingKong.
2) Защита моторов (продается там же на банггуде и стоит копейки). Защищает корпус моторов, принимая удар на себя.

3) Запасные лучи. Обязательно взять в запас. За неделю полетов — я пока не сломал ни одного. Но я и не летал высоко. Пока только обучающие полеты. Еще советуют обмотать их изолентой, которая повышает их прочность. Были случае когда людям удавалось после поломки лапы, долететь и успешно посадить коптер на «изоленте».
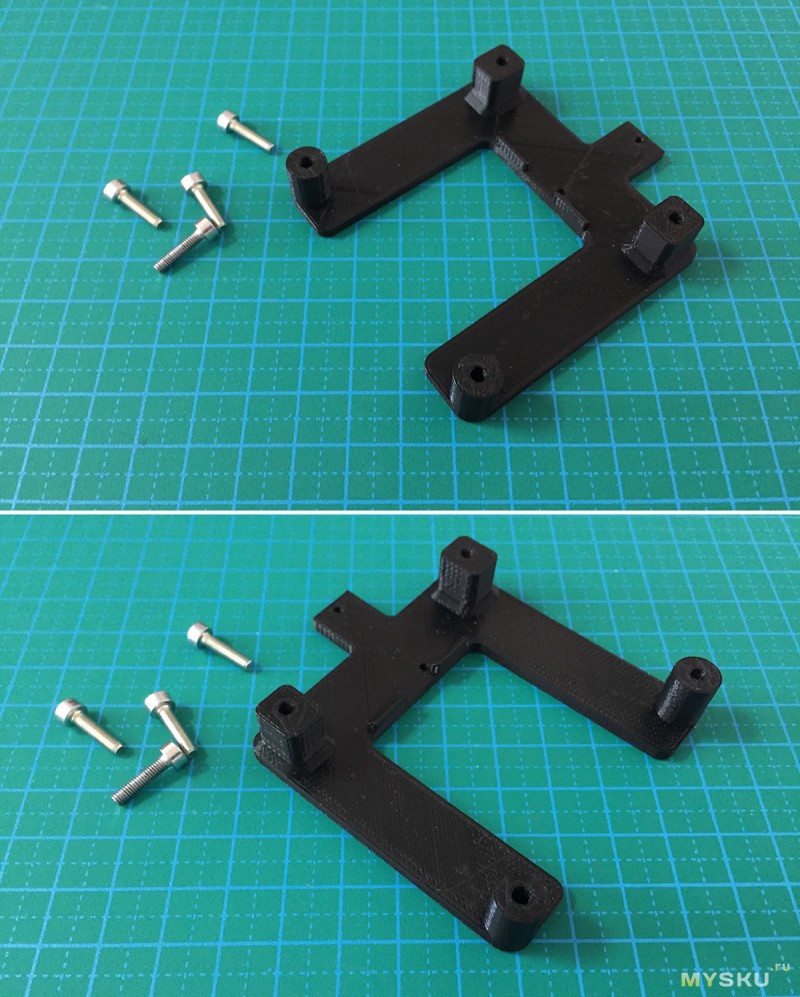
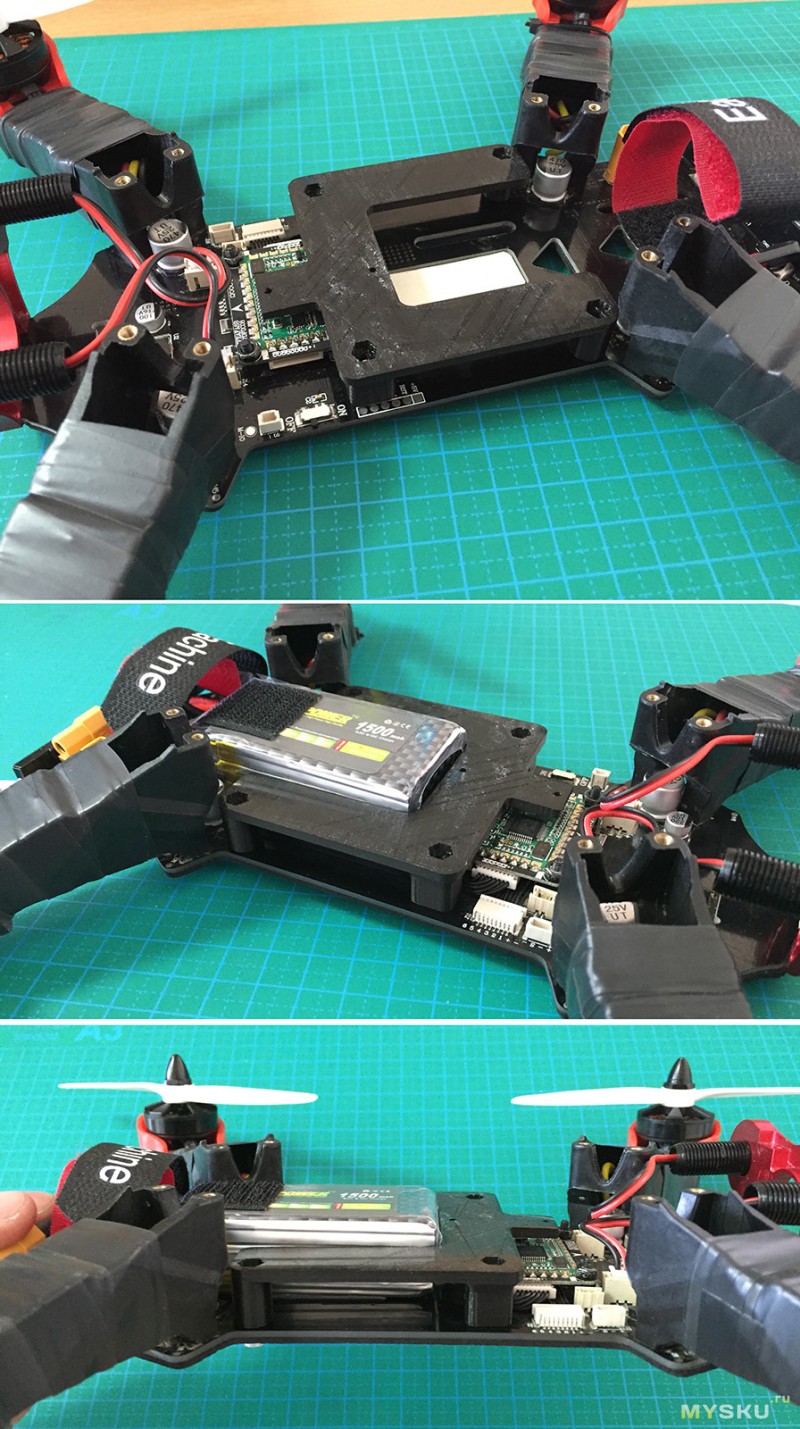
4) Желательно напечатать перегородку фиксации аккумулятора. В ранних ревизиях, в комплектацию рамы входила карбоновая перегородка, которая не позволяла аккумулятору по инерции сносить полетный контроллер. Сейчас такой перегородки нет. И если квадрокоптер падает мордой вниз, то аккумулятор по инерции летит глубже внутрь рамы, вырывая все мозги квадрокоптера. Вот здесь можно скачать 3D чертеж этой перегородки и распечатать в любом рекламном агенстве. Для установки потребуются еще 4 винта М3 длинной 16мм, с гайками. На раме уже есть отверстия для ее установки. Вес детали всего 13 грамм.
 5) Я еще взял липучки, т.к. комплектная совсем короткая. Ей конечно можно пользоваться, но для крепления GPS трекера и камеры одной не хватает.
5) Я еще взял липучки, т.к. комплектная совсем короткая. Ей конечно можно пользоваться, но для крепления GPS трекера и камеры одной не хватает.
На свое усмотрение можно купить пару запасных моторов и регуляторов.
Вывод:
Квадрокоптер быстрый, резвый, мощный, злой! Летать в первое время — страшно. Требует длительных тренировок для освоения всех полетных возможностей. Управляется сложнее чем дешевые RTF квадрики на коллекторных движках. Требует времени на изучение профильных форумов. Необходимо докупать много всего, без чего он попросту не полетит. Можно конечно купить полный комплект, но и стоимость его в разы больше. Квадрокоптер совсем не подходит для съемок и плавных полетов. Не подходит в качестве первого квадрокоптера, для получения навыков управления квадрокоптерами.
Но зато он идеально подходит для тех пилотов, которые уже «выросли» из обычных мелких квадрокоптеров на коллекторы моторах. Совсем другие ощущения от полета!!! Даже без учета FPV. После освоения его летных характеристик и при более-менее уверенном полете можно сразу переходить к FPV полётам и снова получать уйму новых эмоций! А если учесть тот факт, что процесс сборки — это тоже удовольствие. То получаем тройной бонус!)
Eachine Racer 250 — идеальный вариант перехода от мелких квадриков с коллекторными моторами в класс гоночных квадрокоптеров на БК моторах! Бюджетный, простой и надежный.
Всем спасибо за внимание. Удачи в ваших полетах!)
Для начала немного теории. Данный квадрик 250-го размера, расстояние по диагонали между осями моторов у него равняется 280м. Габариты: 220х233x50 мм. Вес: 400 гр (без аккумулятора)Предназначен исключительно для гоночных полётов с элементами фристайла. Данный класс квадрокоптеров совсем не предназначен для плавной съемки с воздуха, так что если ваша цель медленно и плавно летать, а так же получать красивые кадры с воздуха – то подобные квадрики не для вас! Если вы хотите погонять, полетать, поделать флипы и разные «трюки», а так же почувствовать себя пилотом и увидеть полёт от первого лица, таким, каким его видят летающие пернатые и герои фильма «Звездные войны» то это все для вас!
Сам я довольно долго скептически относился ко всем этим квадрокоптерам, хотя уже пару лет в летний период муска буквально завалена обзорами про всевозможные варианты квадрокоптеров. Обычно это RTF (Rady to Fly – готовый к полёту из коробки) за 15-50 баксов.
Но однажды на Youtube я случайно наткнулся на видео и очень уж мне захотелось, самому ощутить все прелести прямой трансляции полётов.
Данный тип квадрокоптеров обычно продается весь по-отдельности. т.е. буквально, если захотеть собрать что-то подобное то помимо самого квадрокоптера необходимо будет докупить: 1) Аппаратуру управления с приемником, который устанавливаем в квадрик; 2) Аккумуляторы (хотя бы 2-3 штуки); 3) Видео очки, шлем или монитор для FPV полётов. 4) Ну и обычные расходники в виде запасных лопастей, пары моторов и т.д.
Для новичков, пожалуй, следует отдельно отметить, что аппаратуры от квадриков типа Syma, Tarantula, JJRC и т.д. не подходят, нужна аппаратура по типу – Flysky FS-i6, Radiolink AT9 и т.д.
По поводу аккумуляторов, то для данного типа квадрокоптеров подходят аккумуляторы 3S или 4S, как правило, чаще всего используют аккумы емкостью от 1500 до 2200mAh. Видеоочки и шлемы нужны, прежде всего, для того, что бы получить максимум удовольствия от полёта. По монитору летать на гоночных квадриках неудобно, хотя и возможно. Чаще всего на просторах alieexpress, banggood, gearbest можно встретить более простые комплекты ZMR250 и QAV250, они, конечно же дешевле, но комплектация существенно беднее и сборка более сложная. Если провести простое сравнение то в комплекте ZMR и QAV отсутствует курсовая камера, FPV передатчик, светодиодная подсветка, а так же сборка сложнее из-за того, что у Eachine Racer 250 все контакты и разводка питания моторов/регуляторов уже распаяна на нижней части рамы, что значительно упрощает сборку. Соответственно собранная модель выглядит более презентабельно и аккуратно за счет того, что не требуется паять и прятать внутрь кучу проводов. Так что оптимальным выбором для новичка, учитывая желание собрать квадрик самостоятельно будет — Eachine Racer 250.
И так, с задачами и выбором модели мы определились. Перейдем к обзору самого комплекта. Заказ был оформлен 4 марта, передан в доставку 8 марта, и 31 марта посылка попала ко мне в руки. Доставка довольно оперативная. Номер посылки трекался на всем пути.
Коробка с запчастями была закручена в один слой изолона и упакована в простой пакет.
Коробке изрядно досталось (ну никак не может наша Почта России освоить аккуратные и быстрые способы доставки). Вес всей коробки 567 грамм. Открыв коробку, видим инструкцию и кучу деталей, каждая из которых помещена в отдельный антистатический пакетик.
В комплект входит:
1) Рама + антивибрационная площадка для камеры
Рама состоит из нижней части, выполненной из текстолита, на которой распаяны конденсаторы и контакты для питания регуляторов и моторов, а так же есть все необходимые разъемы для подключения светодиодов и дополнительных мелочей. Верхняя часть рамы выполнена из 1мм карбона.
2) 4 регулятора ESC Simonk на 12А ( именно они отвечают за управление каждым мотором)
3) Контроллер управления полётом Naze32 10DOF с барометром и компасом на процессоре F1 (можно выбрать CC3D) – отвечает за управление всем квадрокоптером, говоря попросту – это его мозги.
4) 4 мотора 2204 2300kv (разной направленности), под направленностью мотора обычно понимают вращение мотора обратное направлению закручивания гаек фиксации пропеллеров, CW и CCW
5) 4луча – многих смущает пластиковые ноги, но на профильных форумах некоторые обладатели обоих видов квадрокоптеров (с пластиковыми и карбоновыми лучами) пишут о том, что в практике пластиковые ноги ничуть не уступают в прочности.
6) Голова алюминиевая
7) Передние светодиоды
8) Курсовая камера 1000TVL — камера, не пишущая, предназначена только для ориентирования при полёте, с просмотром через видеоочки или шлем
9) Видеопередатчик 600mW 5,8G на 32 канала – предназначен для передачи видеосигнала по радиоканалу с камеры на монитор/очки/шлем
10) Антена для видеопередатчика TX «грибок». Важно!!! Нельзя подключать питание квадрокоптера без накрученной антенны на видеопередатчик!!! Очень быстро сгорает!
11) 2 комплекта винтов, размер 5045, винты жесткие, довольно хрупкие.
12) Липучка для аккумулятора, карбоновый ключ для откручивания гаек крепления пропеллеров, три шестигранных ключа необходимых для сборки
Сборка:
Сборку начинаем с полётного контроллера. Я изначально начал собирать квадрокоптер по инструкции, и лишь потом узнал о том, что в инструкции неверно указано положение полётного контроллера. Так что на некоторых фото будет противоречивая информация. Контроллер нужно устанавливать так, что бы micro-USB слот находился слевой стороны квадрика, стрелкой вперед. Берем наш контроллер Naze32, и крепим на него нейлоновые ножки таким образом, что бы гайки находились сверху.
Зеленая текстолитовая плата на контроллере не позволяет ровно установить гайки для установки ножек (мешают углы), необходимо подпилить напильником. Затем подключаем комплектным проводком и устанавливаем контроллер на нижнюю часть рамы.И закрепляем полетный контроллер к нижней части рамы на 4 винта.Далее берем «морду», устанавливаем в неё передние светодиоды и фиксируем их маленькими, потайными винтами. Крепление так себе. Держится конечно, но гораздо надежнее было бы притянуть светодиоды на гайку с обратной стороны. Недавно на муське был обзор, где собирали ходовые огни на авто из точно таких же светодиодов.Затем откладываем в сторону нижнюю часть рамы и берем верхнюю. К ней закрепляем видеопередатчик. Для этого откручиваем гайку с антенного разъема, берем 2 нейлоновые проставки и два винта и закрепляем передатчик к корпусу. Следующим этапом будет монтаж регуляторов и подключение моторов к ним. Это единственная часть сборки, где потребуется паяльник и минимальные навыки в пайке. Контактные площадки уже все залужены, так что нам остается только припаять 12 проводков от регуляторов к раме. Не перепутайте порядок припайки проводов. На этот раз в инструкции все верно указано.
Устанавливаем моторы на «ноги» квадрика, закрепляем на винты. Порядок установки моторов: левый верхний и правый нижний по часовой (СCW), правый верхний и левый нижний против часовой (СW). Проще всего понять какой куда ставить, можно проверив в какую сторону закручивается гайка. Если по часовой, значит мотор вращается против часовой, его надо ставить справа вверху или слева внизу.
Схема
Провода от моторов пропускаем через перегородки ног и припеваем моторы к регуляторам.После успешной пайки, устанавливаем «ноги» и закрепляем их нижней части рамы на 2 винта.Устанавливаем морду, подключаем передние светодиоды. Закрепляем на винты к нижней части рамы.Затем берем антивибрационную площадку, «впихиваем» демпферы в отверстия площадки и верхней части корпуса. Я устанавливал площадку, после того как собрал всю раму. Пришлось помучиться. Проще устанавливать пока верхняя часть рамы не закреплена.После этого можно приступать к монтажу верхней части рамы. Для начала подключаем все разъемы видеопередатчика и камеры. Очень удобно, что все разъемы разные — нет возможности, что то перепутать и воткнуть не туда. Камеру нужно устанавливать, таким образом, что бы наиболее длинный «язычок» платы смотрел вверх. Он позволяет регулировать наклон камеры, пока не затянуты винты верхней крышки рамы. Затем берем карбоновые проставки, и прикладываем их на верхнюю часть лучей. И сверху укладываем верхнюю часть рамы. Ищем такое положение, что бы отверстия под винты в раме и поставках совпадали и закручиваем винты.Почти готово. Берем остатки винтов и закручиваем. Квадрокоптер собран. Наводим косметику. Прячем лишние провода и закрепляем регуляторы в ноги при помощи нейлоновых стяжекГотово. Сборка закончена. Общий вес квадрокоптера, с установленной защитой, приставкой под аккумулятор и с аккумулятором составил 550 граммСледующий этап, обновление, прошивка и настройка полётного контроллера. Для этого нам понадобится любой компьютер с доступом в интернет. Скачиваем приложение Cleanflight Configurator для Google Chrome. Запускаем. Откроется основное окно программы, и первым делом мы скачиваем драйвер CP210x Driver для подключения квадракоптера к компьютеру.
Берем квадрокоптер и USB провод для подключения к компьютеру, подключаем и нажимаем зеленую кнопку «Connect» в правом верхнем углу. Открывается окно настройки полетного контроллера.После того как у нас успешно получилось подключить квадрик к компьютеру, переходим к этапу обновления прошивки. Прошивок существует несколько: openpilot, cleanflight, betaflight… Тут надо пробовать и выбирать оптимальную для себя. Мы же разберем вариант для новичков, — более популярную и стабильную версию Betaflight от Бориса… для этого переходим на сайт и скачиваем актуальную прошивку. Всегда советуют скачивать предпоследний вариант прошивки, как более стабильный и рабочий. Скачиваем Betaflight 2.6.0 «betaflight_2.6.0_NAZE.hex», запоминаем расположение файла. Снова запускаем Cleanflight (квадрокоптер подключен к компьютеру), и не нажимая кнопку «Connect», в меню левой части экрана выбираем «Firmware Flasher» (1) и нажимаем на иконку в правой, нижней части экрана «Load Firmware (Local)» (2) — указываем путь к файлу прошивки, которую мы скачали ранее. Затем нажимаем Flash Firmware (3). И ждем окончания прошивки. (4) Вся процедура занимает меньше минуты.После успешной прошивки, первым делом — отключаем компас и барометр (1) (на версии с контроллером CC3D их нет). Не знаю как у других, но у меня со включенным компасом и барометром квадрокоптер непредсказуем. Может повернуть самостоятельно, закрутиться по рудеру, или вообще перевернуться. Долго не мог понять почему он себя так ведет, выход нашелся, но не сразу. Для отключения переходим во вкладку (2) «CLI»
В нижней строке поочерёдно вводим следующие команды:1) set baro_hardware = NONE
2) set mag_hardware = NONE
и сохраняем изменения командой
3) save
После ввода команды «save» полётный контроллер должен перегрузиться и в верхней части экрана (2) перестанут светиться компаса и барометра.
Переходим к следующему этапу настройки. В первой вкладке «Setup» проверяем правильность работы акселерометра, т.е. правильно ли полетный контроллер определяет положение квадрокоптера в пространстве. Для этого наклоняем квадрокоптер в разные стороны и изображение на экране компьютера должно соответствовать наклону квадрокоптера. На экране перед квадрокоптера обозначен большой зеленой стрелкой (1). Если все движения квадрокоптера соответствуют изображению на экране, то затем мы устанавливаем квадрокоптер на ровную поверхность и нажимаем кнопку (2) «Calibrate Accelerometer», после успешной калибровки переходим во вкладку (3) «Configuration» (Если движения квадрокоптера не соответствуют изображению, то нам нужно будет программно задать другое расположение полетного контроллера, об этом чуть ниже)
Здесь мы видим основные настройки:
1) Первое, что стоит выбрать — это тип нашего квадрокоптера, и еще раз проверить что бы схема вращения моторов совпадала с нашей.
2) Пункт настройки моторов, здесь мы задаем минимальный/максимальный газ и настраиваем блокировку моторов.
MOTOR_STOP — блокировка моторов при арминге, т.е. когда вы соединяете пульт управления с квадрокоптером, в активированном режиме ваши моторы не будут вращаться. Если ползунок снять, то при соединении апы буду запускаться моторы на минимальном газе.
ONESHOT125 — на наших регуляторах не работает. Если не ошибаюсь, то это технология высокоскоростного обмена данными между контроллером и регуляторами моторов.
Minimum Throttle — минимальное значение газа, важно что бы это значение было больше значения, при котором моторы начинают вращаться. Определить минимальное значение начала вращения моторов можно во вкладке «Motors», но об этом чуть ниже.
Middle Throttle — среднее значение газа, устанавливаем 1500.
Maximum Throttle — максимальное значение газа, устанавливаем 2000.
3) Если у вас акселерометр не правильно отображал положение квадрика на экране ПК (квадрокоптер на изображении перевернут, или его стороны инвертированы), то как раз в этом меню можно программно поменять положение квадрокоптера. Для этого экспериментальным методом тыка пробуем заменить угол так, что бы положение квадрокоптера соответствовало изображению на экране.
4) Меню выбора способа, которым вы подключаете передатчик аппаратуры управления. В данном комплекте, с полезным контроллером, шел провод только для подключения по PWM (т.е. каждый канал передается по отдельному проводку). По PWM подключается нормально, работает! Но все, почему-то любят подключаться по SBUS. Адаптер для подключения по SBUS (все каналы идут по 3 проводам) надо покупать отдельно.
5) Обязательно нажимаем кнопку «SAVE and Reboot» — для сохранения всех изменений.
Следующий пункт «PID Tuning» — для настройки пидов. Вещь очень непонятная и самая сложная. Все регулярно их меняют, спорят о настройках и у каждого они свои. Если говорить простым языком — то это настройка стабильности полета.
1) выбираем LuxFloat — как наиболее стабильную и не требующую изменений.
2) Roll rate — это настройка чувствительности ваших стиков. Вещь довольно индивидуальная. Кому как удобней. Для начала оставляем по умолчанию, пробуем и правим в нужную сторону.
3) Настройка самих пидов. Для начала летаем по умолчанию и по мере освоения навыков управления, все больше читаем про эти самые пиды и настраиваем под себя. В варианте «из коробки» и по умолчанию квадрик летает, не идеально стабильно конечно (присутствует и «болталка» и покачивания и т.д.), но для обучения пойдет.
Следующий пункт Receiver — настройка подключения аппаратуры.
1) Выбираем тип нашей аппаратуры. Главное — выбрать тот тип, что бы движение стика газа соответствовало ползунку Throttle. И второй нюанс — включаем аппаратуру, выставляем оба стика в центральное положение и первые 4 значения должны быть равны 1500, а в крайних положениях 1000 и 2000 соответственно (это выстраивается в меню самой аппаратуры в пунктах «Sub-Trim» и «End-Point». И затем настраиваем остальные каналы на разные переключатели для переключения режимов, арминга и т.д. Так как аппаратура у всех разная, то подробную настройку можно найти на Youtube.
Далее вкладка «Modes» — это настройка переключения полетных режимов. Без этой настройки не удастся запустить двигатели.
ARM — арминг (соединение аппаратуры с квадрокоптером). Я настроил арминг на отдельный, двухпозиционный переключатель (у меня — канал 4).
ANGLE — самый простой режим стабилизации. Очень плавный. Рекомендуется для новичков. А так же его включают при посадке, для плавного спуска и приземления. Я выставил на 3 канал (трехпозиционный переключатель, в нижнее положение).
HORIZON — тоже довольно стабильный и плавный режим, но уже немного пореще и позволяет делать флипы (удерживая правый стик в одну из сторон). Выставил на тот же 3 канал (трехпозиционный переключатель, в среднее положение)
AIR MODE — более продвинутый режим, многие летают в нем. Максимальная стабилизация в независимости от положения газа. Мне пока сложно. Выставил на 3 канал (трехпозиционный переключатель, в верхнее положение, но пока не пользуюсь)
ACRO — режим для опытных пилотов, включен по умолчанию, т.е. если отключить все наши режимы — то как раз таки и получим ACRO. Новичкам не советую. Квадрик становится резким и быстрым.
И последний, нужный нам, пункт настройки — это Motors. Здесь мы можем посмотреть минимальное значение при котором начинают вращаться моторы (для пункта Configuration), а так же можем откалибровать все моторы.
Для калибровки моторов первым делом снимаем все лопасти с моторов!!! ВАЖНО! если не снять — возможны травмы. Затем активируем (1) ползунок. Поднимаем общий (2) ползунок моторов вверх. Подключаем аккумулятор к квадрокоптеру. Раздастся короткий сигнал, затем опускаем ползунок (2) вниз, раздастся обычный сигнал включения квадрокоптера. После этого медленно поднимаем (2) ползунок вверх. При этом моторы начнут крутится. Поднимаем до максимального значения и отпускаем вниз. Калибровка завершена. Тут же, ползунком каждого мотора — можно посмотреть значение запуска мотора.
Сохраняем еще раз все настройки и отключаем квадрокоптер. После этого устанавливаем пропеллеры, подключаем аккумулятор и можно переходить к первому полету.
Полёт.
Честно говоря, я не думал что он такой мощный. У меня уже есть пару квадриков (Cheerson CX-10, Tarantula 1505), но по сравнению с ними это просто монстр. Это как сравнивать жигули с двигателем 1,5 литра с каким нибудь Ferrari. При первом пуске адреналин зашкаливал. Он очень резкий. Даже в режиме ANGLE. Потребуется не один десяток полетов, что бы привыкнуть и научиться летать. На видео запечатлен первый пробный полет, ничего выдающегося, просто факт того, что он летает) Погода у нас еще не лётная, на открытых полях еще снега по колено.
Летать конечно же нужно на открытом пространстве, за чертой города. Что бы исключить падение квадрокоптера кому-нибудь на голову. А падать первое время будем — очень часто. Чаще всего из страха «улетания» квадрокоптера обратно в Китай. В связи с этим настоятельно рекомендуется покупка следующих запчастей:
1) Запасных лопастей. Покупать желательно сразу пар 10-20. Ломаются они очень часто. Подходят лопасти размера 5040 и 5045 (в комплекте были 5045, я такие же и купил). На форумах советуют покупать лопасти KingKong.
2) Защита моторов (продается там же на банггуде и стоит копейки). Защищает корпус моторов, принимая удар на себя.
Дополнительная информация
3) Запасные лучи. Обязательно взять в запас. За неделю полетов — я пока не сломал ни одного. Но я и не летал высоко. Пока только обучающие полеты. Еще советуют обмотать их изолентой, которая повышает их прочность. Были случае когда людям удавалось после поломки лапы, долететь и успешно посадить коптер на «изоленте».
4) Желательно напечатать перегородку фиксации аккумулятора. В ранних ревизиях, в комплектацию рамы входила карбоновая перегородка, которая не позволяла аккумулятору по инерции сносить полетный контроллер. Сейчас такой перегородки нет. И если квадрокоптер падает мордой вниз, то аккумулятор по инерции летит глубже внутрь рамы, вырывая все мозги квадрокоптера. Вот здесь можно скачать 3D чертеж этой перегородки и распечатать в любом рекламном агенстве. Для установки потребуются еще 4 винта М3 длинной 16мм, с гайками. На раме уже есть отверстия для ее установки. Вес детали всего 13 грамм.
Дополнительная информация
На свое усмотрение можно купить пару запасных моторов и регуляторов.
Вывод:
Квадрокоптер быстрый, резвый, мощный, злой! Летать в первое время — страшно. Требует длительных тренировок для освоения всех полетных возможностей. Управляется сложнее чем дешевые RTF квадрики на коллекторных движках. Требует времени на изучение профильных форумов. Необходимо докупать много всего, без чего он попросту не полетит. Можно конечно купить полный комплект, но и стоимость его в разы больше. Квадрокоптер совсем не подходит для съемок и плавных полетов. Не подходит в качестве первого квадрокоптера, для получения навыков управления квадрокоптерами.
Но зато он идеально подходит для тех пилотов, которые уже «выросли» из обычных мелких квадрокоптеров на коллекторы моторах. Совсем другие ощущения от полета!!! Даже без учета FPV. После освоения его летных характеристик и при более-менее уверенном полете можно сразу переходить к FPV полётам и снова получать уйму новых эмоций! А если учесть тот факт, что процесс сборки — это тоже удовольствие. То получаем тройной бонус!)
Eachine Racer 250 — идеальный вариант перехода от мелких квадриков с коллекторными моторами в класс гоночных квадрокоптеров на БК моторах! Бюджетный, простой и надежный.
Всем спасибо за внимание. Удачи в ваших полетах!)
| +34 |
13878
42
|
Самые обсуждаемые обзоры
| +90 |
2447
32
|
| +35 |
1978
63
|
Вопросы собственно такого плана:
1) Нужно ли регистрировать свой квадрокоптер.
2) Можно ли летать во дворах, с балкона, в парке.
Или это все требования если твой квадрокоптер больше определенного веса?
Контроллер
ebay.com/itm/111434522385
Распределитель питания
ebay.com/itm/111424882708
Пропеллеры
ebay.com/itm/181935980338
Регули
ebay.com/itm/262159732904
Двигатели
ebay.com/itm/121817075466
Рама
ebay.com/itm/311441469274
Аппа
ebay.com/itm/140912182386
Аккум
ebay.com/itm/391256484917
Пульт
ebay.com/itm/161917551547
В корзине лежит вот такая сборка для коптера под 250-ю раму. Что можно здесь заменить, что может быть добавить (я особо не шарю, мог что-то забыть)? Хочу попробовать собрать небольшой, но добротный коптер, чтобы можно было делать картиночки с экншкамеры для заметок в СМИ. Есть на примете и сборка под 450-ю, но думаю зачем, если и 250-й вполне тянет камеру с аквабоксом…
На остальные — летай, как летали.
Судя по тому, что скоро наша Дума уйдет в летний отпуск, то поправок в скором времени ждать не приходится.
Знакомый юрист сказал, что пока нет процедуры регистрации можно спокойно летать и проблема может быть только если попадешь на какого-нибудь слишком рьяного полицейского. В таком случае можно кучу нервов и времени потратить.
как вариант пару
граммсантиметров спилить, заподлицо с мордой…он легко поднимает GoPro в аквабоксе и GPS трекер (а это грамм 150, минимум)
Например я использую такие светодиоды на носу своего скутера (Honda tact AF24), как дхо, и как очень неплохая подсветка в тёмное время при движении по кустам и камышам. Часто на рыбалку езжу. Очень хорошие лампочки другими словами )))
Погонять самое то, но с GPS мне как то поспокойнее-сам прилетает если что
ТЫЦ
Что делает гоночный квадрик непригодным для фото/видео свысока?
— отсутствие стабилизации
— очень резвые маневры, даже при самом плавном управлении
По крайней мере один чел поставил на Eachine Racer 250 гиростабилизационный подвес для камеры и повесил туда камеру. Видео получается очень стабильное.
https://aliexpress.com/item/item/2016-Hot-Sale-Eachine-Racer-250-DIY-Kit-CC3D-Naze32-w-600MW-5-8G-32CH-transmitter/32632065470.html
Какую аппаратуру брать? и акб?
Очки нашел такие:
www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=78125
Стоит ли их брать?
Аппа из недорогих и перспективных Флуску И6 — прошивается под 10 каналов, возможно телеметрия с родным приемником — после доработки. вот тема 16 страниц много читать не придется.
Акб не подскажу не имел дело с хорошими — плохие советовать не буду
АКБ берите хорошие на хоббикинге. к примеру — Turnigy nano-tech
шлем лучше Eachine VR-007 или новые Eachine FullHD. Они выглядят аккуратнее, а так же в комплект входит все необходимое. Не нужно ничего докупать…
после прошивки FlySky FS-i6 нужно будет покупать приемник на 10 каналов?
а по поводу батарей — если вы новичок, то 4S наверно будет многовато. Квадрик конечно же поддерживает 4S, но говорят, он становится значительно реще и мощнее.
Я подумал, что мне еще далеко до 4S, и взял акки 3S
не лучше — а быстрее. Так нужно понимать. Но не линейно, 3с весят меньше 4с. Летит быстрее, но меньше по времени
FCNLBG- цена -US$6.35
Особенно спасибо за наводку насчет защитной планки для батареи. Сделаю такую себе, когда придет мой рейсер.
Сейчас как раз жду Racer 250 с ибея, почему-то он там оказался за 91 долларов, когда все остальные магазины минимум продают за 140. Не знаю, может быть какой-то подвох, тогда буду апеллировать к Ebay Buyer Protection, все описание прочитал — похоже что это действительно Eachine Racer 250, а не какой-то клон.
И кстати, исправьте информацию про OneShot125 — это технология высокоскоростного обмена данными между контроллером и регуляторами моторов. Насколько я знаю, эта технология не поддерживается регуляторами Racer 250.
не знаю почему на ebay дешевле чем на сайте banggood, ведь Eachine это банггудовский бренд. И получается продается без посредников. Откуда продавцу с ebay взять квадрик дешевле чем у банггугуда я не знаю.
Перед покупкой тоже на ebay находил лот с RTF комплектом за 90 баксов. Но продавец находился в штатах и обещал бесплатную доставку (уже подозрительно), имел пару десятков положительных отзывов о продаже чехольчиков для телефонов и рейсер был первым из подобных лотов у него. Заказывать не стал. Но видно было, что кто то заказывал. Через месяц-полтора поперли негативные отзывы о том, что продавец так и не отправлял товар.
helicp.blogspot.com/2016/02/blheli-eachine-racer-250-oneshot125.html