Операция по трансплантации: мучаем квадрокоптер CXHobby CX-20. Часть 2

- Цена: $10.22
- Перейти в магазин
Повествование продолжается! Изначально планировал опубликовать вторую часть через неделю, но чего кота за… *ой, тут же много котоводов* тянуть? Сегодня продолжаю собирать квадрокоптер, устанавливаю контроллер, ресивер и самодельный регулятор напряжения для оных. Дополнительно расскажу о намедни приобретенном пирометре. Третья часть, следуя заданному плану — еще через 3 дня.
Часть 1
Часть 3
Часть 4
Контроллеру оставляю родной корпус и двусторонний вспененный скотч — он отлично гасит вибрации, а вот в ресивере решил избавиться от внешней пластиковой оболочки.
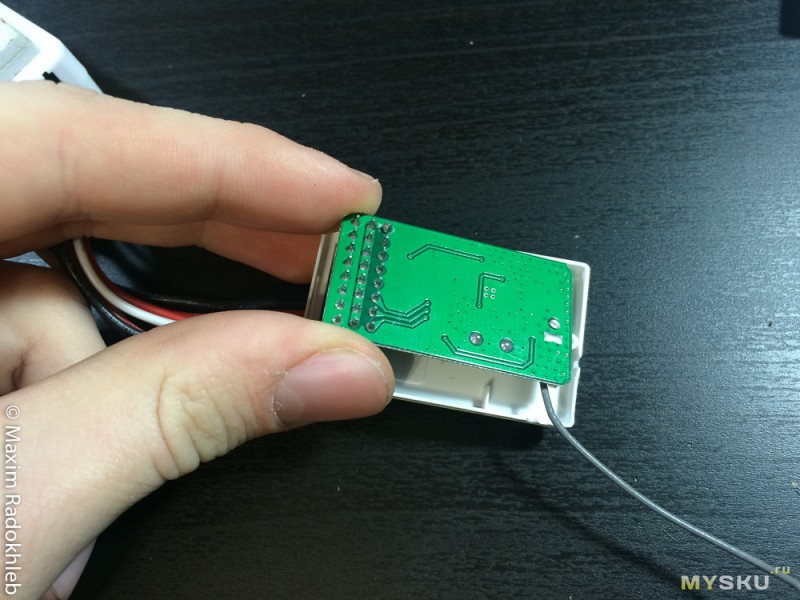
Закрепил термоклеем провод антенны, ибо родной компаунд куда-то «испарился».

И спрятал все это дело в термоусадочную трубку:

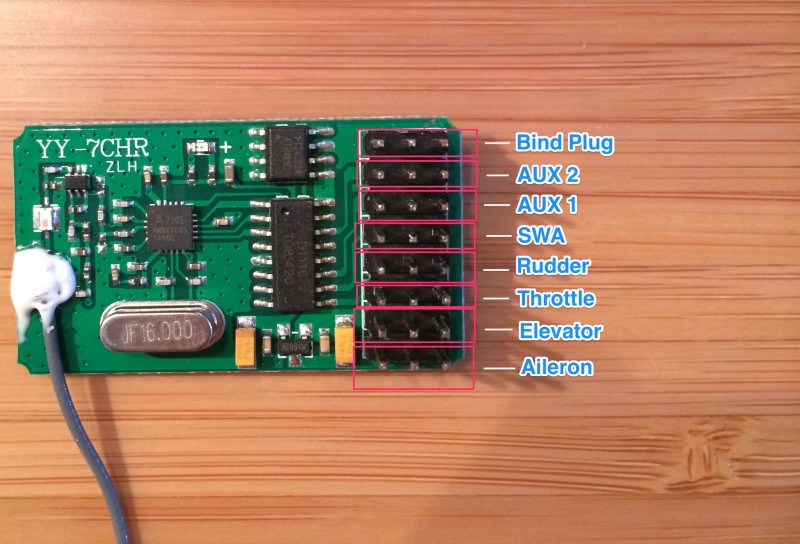
От контроллера ничего не отключал, но картинку с назначением разъемов на приемнике прилагаю.
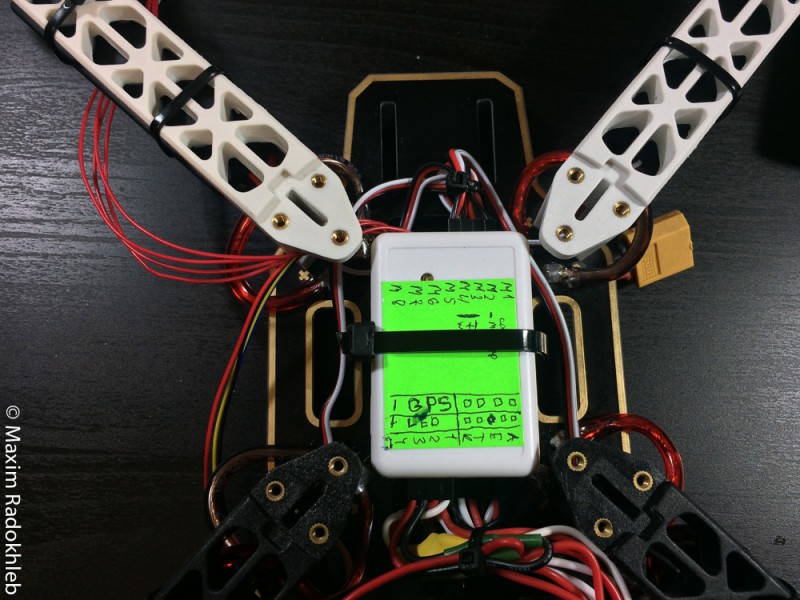
Примеряю расположение контроллера на раме. Для удобства сделал наклейку с подписями всех портов ввода/вывода.
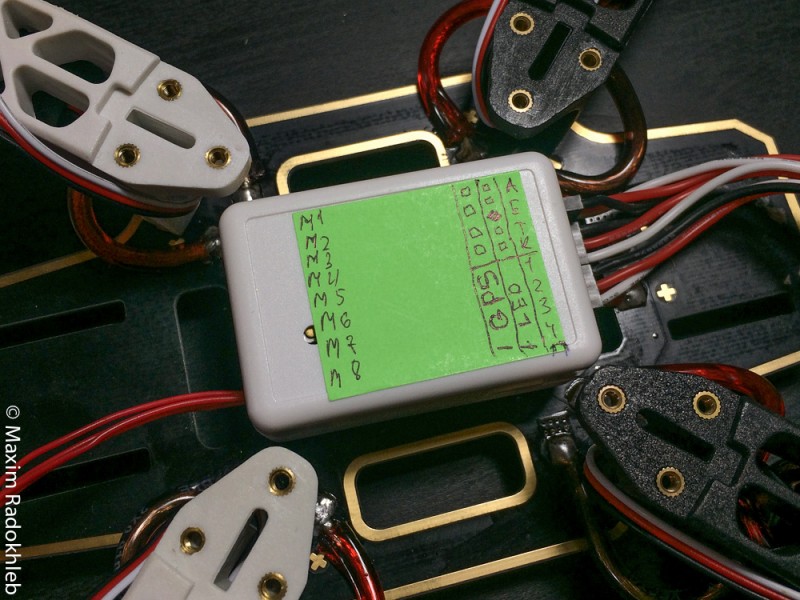
Моторы подключаю в соответствии со схемой на подлинный контроллера ArduPilot Mega:

ВАЖНО! При установке я повернул контроллер на 180 градусов по горизонтальной оси, но забыл указать это в параметрах, из-за чего отложил хорошеньких кирпичей при первом запуске (вертолет перевернулся в момент отрыва от земли). В Full Parameter List для параметра AHRS_ORIENTATION нужно остановить значение «yaw180», т.е. поворот по оси рыскания на 180 градусов. О подключении к компьютеру и установке ПО я еще расскажу позже.
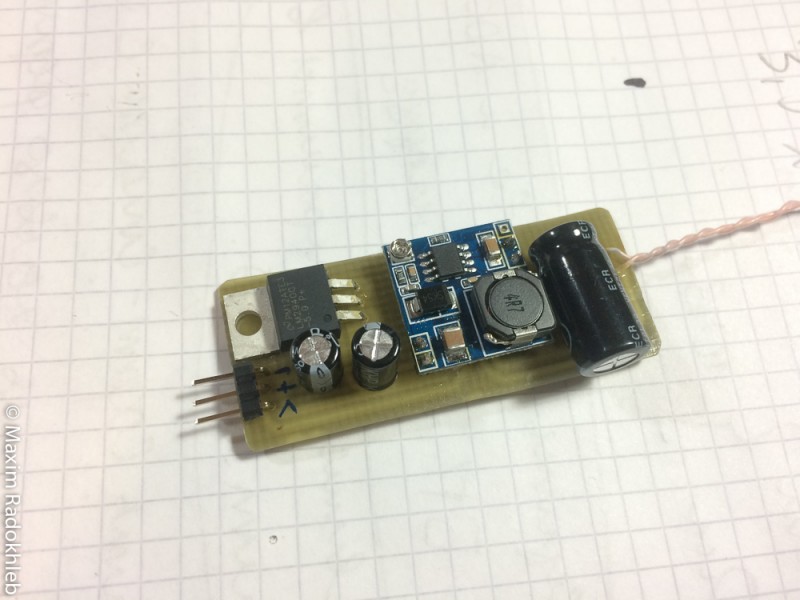
Я, в свою очередь, начитавшись интернетов, а именно вот эту статью от Алексея Козина о регуляторах напряжения для контроллеров APM, загорелся тоже сделать свой, спреферансом и поэтессами учетом наличия деталей. Забегая наперед — получилось нечто следующее:

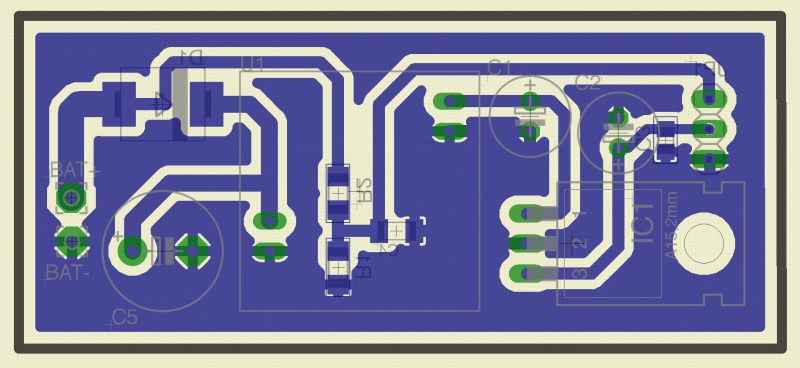
В своей статье Алексей предлагает совместить импульсный стабилизатор для понижения основного напряжения с 3-4S АКБ до 6.3 В и линейный стабилизатор для создания требуемых для идеального питания 4.9-5 Вольт. Немного изменил схему Алексея исходя из наличия деталей:

Основное отличие — это использования иного модуля импульсного преобразователя. Ранее в магазине Eachbuyer на пробу были закуплены три модуля на микросхеме RT8272, тогда как плата с LM2596 у меня была одна. И да, не буду скрывать, что хотелось немного поупражняться в трассировке печатных плат, освежить память эксплуатации EagleCAD.

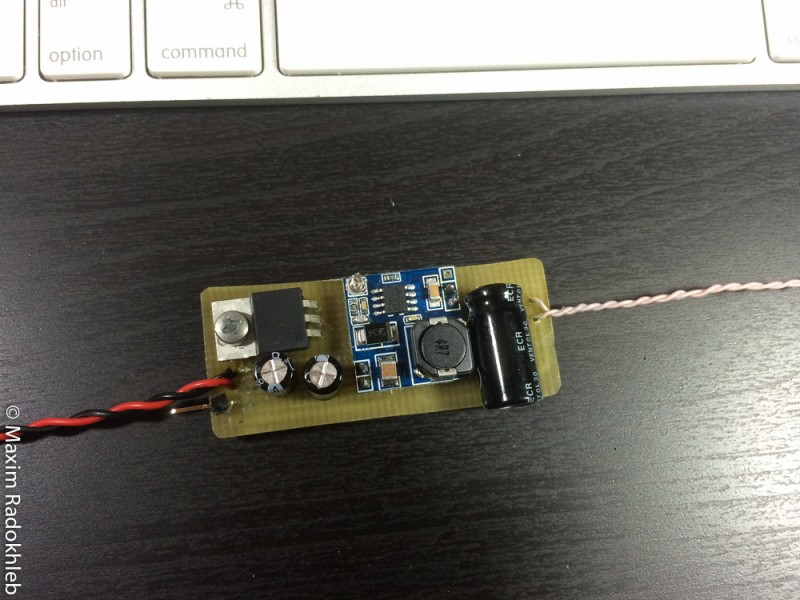
LM2940 применил в TO220 корпусе, конденсаторы — обычные электролиты вместо танталов, емкость фильтрующего конденсатор с резистивного делителя (о применении этого делителя расскажу в следующей части) понизил до 2.2uF, а на вход импульсника установил бочонок на 1000 uF. Диод от переполюсовки — здоровенный Шоттки в SMC корпусе на 3А, применить его всяко дешевле, чем ехать на радиорынок. :)
Ох, хлорное железо. Сколько я (пока дома жил) люлей от родителей за это вещество получил… Особенно, когда на ковер пол литра пролил — там до сих пор здоровенное пятно. :) Плата делалась в кустарных (общажных) условиях по технологии ЛУТ на журнальной бумаге и еле пыхтящем принтере. Кстати, несколько лет назад, когда платы делал достаточно часто легко, смывал тонер жидкостью для снятия лака, а сейчас обошел несколько комнат в общежитии и, что удивительно, ни одна жидкость не справилась. Пришлось обратно переносить тонер на глянцевую бумагу нагреванием, из-за чего в последствии не удалось нормально залудить плату. Да и подтравил немного, с непривычки.

Потом несколько фейлов вылезло во время пайки. Старайтесь не заламывать ножки у основания корпусов ТО220.
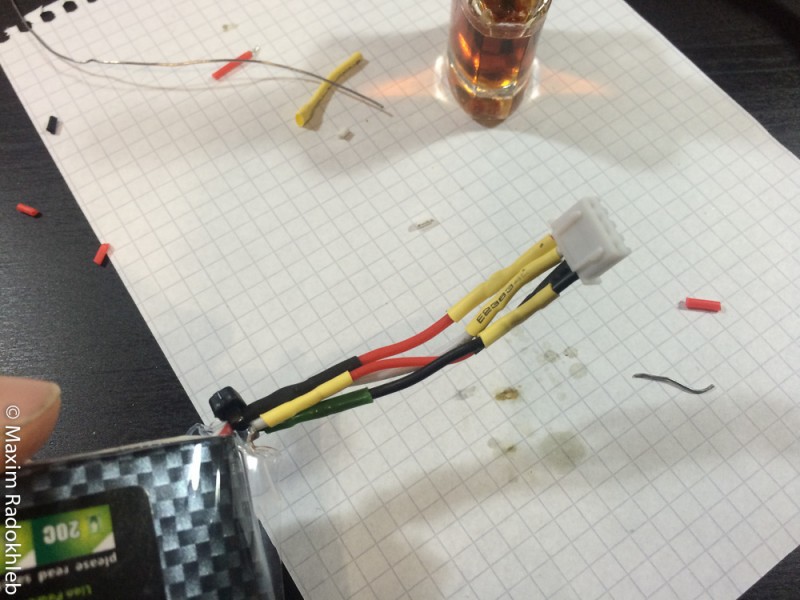
Протестировал созданный БП с разными нагрузками от 1,5А до 500 мА. 1.5А чисто ради интереса, т.к. наш линейный стаб по документации рассчитан на 1А, который и так разогревает его до порядочной и весьма забавной температуры:

И это не предел, температура продолжает расти из-за отсутствия нормального радиатора. Но мне такой ток не нужен, потребление всей-всей авионики с заделом на последующую установку OSD и телеметрии не достигает 500 мА. Итоговые характеристики:
Рекомендованный ток стабилизации: до 500 мА
Входное напряжение: аккумуляторы 3-4S, до 24В по даташиту
Вес: ~20 грамм
Дополнительные функции: делитель напряжения с АКБ для мониторинга заряда и использования FailSafe режима
Для надежности все провода у основания советую закрепить термоклеем. Еще итоговое фото:
Из девайсов закупленных намедни расскажу про пирометр. Выше уже светил его. Брал в магазине TomTop за 33 доллара при курсе гривны 20. Покупал UNI-T, потому что считаю их брендом, а в плане измерительного инструмента это важно.

На самом деле рассказывать о приборе-то и нечего особо. Он работает и работает без нареканий. Диапазон измерений температур от -20 до 400 °C. Есть лазерный указатель, подсветка дисплея, фиксация минимальной и максимальной температуры. Оптическое разрешение 12 к 1, т.е. с расстояния 12 сантиметров прибор измеряет температуру на участке диаметром 1 см. К приобретению рекомендую, для себя уже открыл кучу юзкейсов, включая диагностику неисправностей в электронике. :)
Продолжаю. Пришло время подключать самодельный гибридный стаб к бортовой сети квадрокоптера. Для надежности подпаиваюсь к контактам на распределительной плате.

И креплю модуль с нижней стороны рамы на двусторонний скотч.
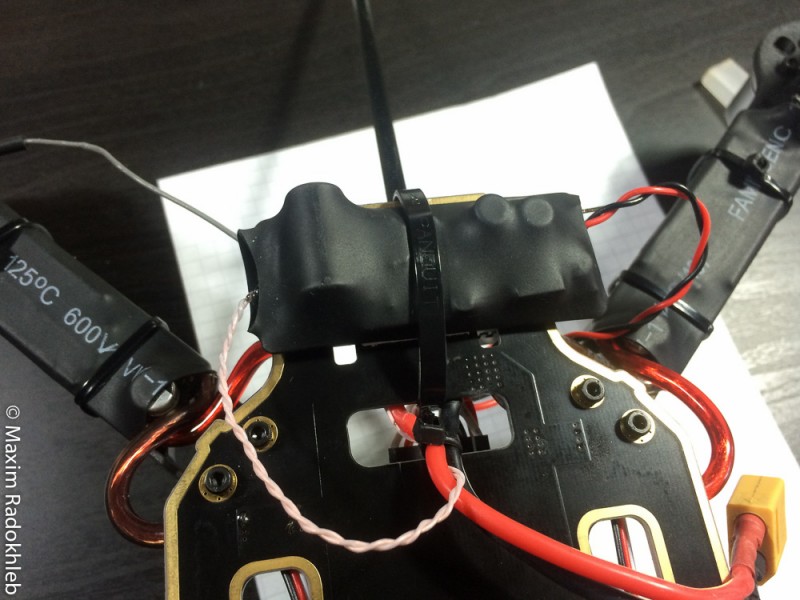
С обратной стороны располагается приемник радиоаппаратуры, который по совместительству является транспортом «питания» для полетного контроллера. Дополнительно креплю все это дело большой стяжкой.

Куда деть антенну? Спрашивал на форуме — тишина. Кто-то предлагает закрепить на луч, но лично меня немножко пугает соседство с регуляторами скорости двигателей.

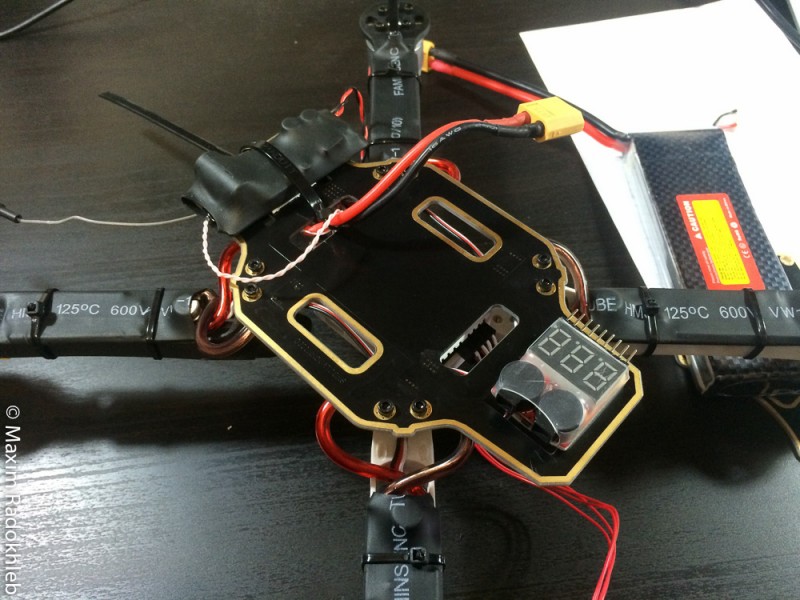
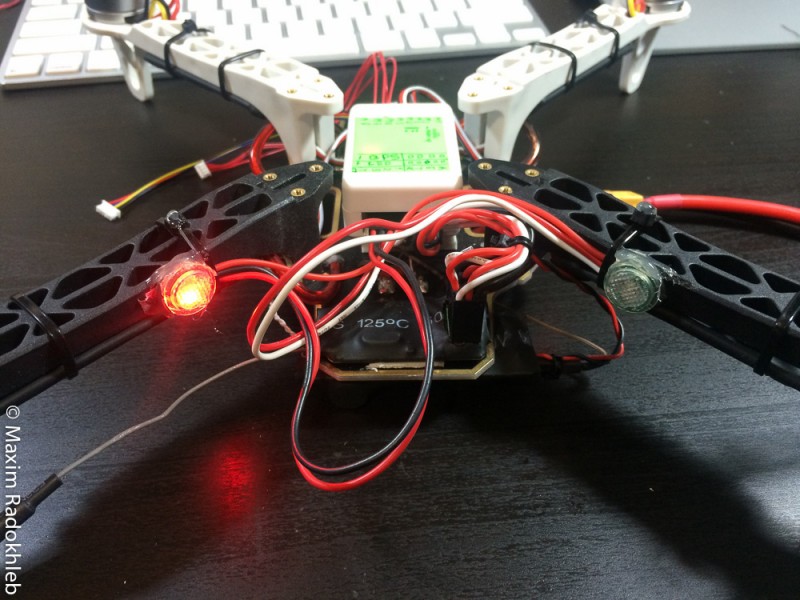
Прикинул расположение дополнительного индикатора состояния АКБ. В любом случае придется удлинять провода на аккумуляторе. Пищалка, кстати, неистово громкая. Покупал на DX за 3 доллара.
Удлинил провода обрезками от ESC. Да, выглядит колхозно, но снимать термоусадку с АКБ, чтобы получить доступ к контактам не хотелось, ибо где ее потом взять такую термоусадку?
Светодиоды индикации блокировки двигателей и состояния GPS «посадил» на термоклей, а провода пропустил под стяжкой, которая крепит контроллер скорости. Линзы от CX-20 тоже оставил.
Навожу марафет — укорачиваю и закрепляю провода от светодиодных модулей. Антенну временно решено оставить под одним креплением с приемником радиоуправления. Посмотрим, как будет вести себя на улице.

Аналогичные операции по укреплению провожу с контроллером и сигнальными проводами от ESC.
Промежуточный результат:

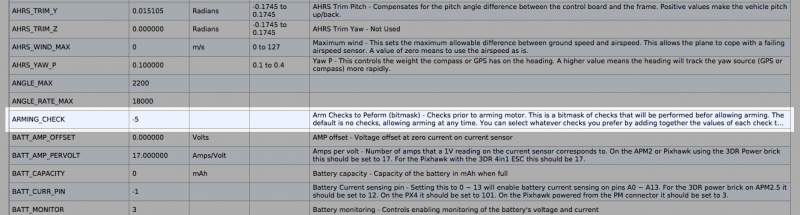
Решил проверить работу моторов, пока без калибровок и прочего. Очень долго не мог понять почему не разблокируются моторы. Откалибровал аппаратуру (об этом в следующей части), т.к. даже в серийном аппарате была проблема с дизармингом — безрезультатно. Позже дошло, что в контроллере применены какие-то защитные механизмы, которые не позволят взлететь, например, без компаса или GPS. За эту функциональность отвечает параметр «ARMING_CHECK» в программе для работы с контроллером APM (подробней об этом тоже в следующей части).
Завелся! Моторы вращаются и вращаются правильно, но при старте наблюдается небольшой рассинхрон (или у меня глюки) — будем калибровать. На сегодня все.
В третьей части (ориентировочно — понедельник) расскажу об установке и настройке телеметрии, мониторинге напряжения с АКБ, настройке FailSafe режима и калибровке всего и вся, что уже есть и первых уличных тестах.
Все интересующие вас вопросы и пожелания можно также задавать в соцсетях: Facebook, ВКонтакте, Twitter, Instagram (кстати, подписывайтесь — тут также иногда проскакивают интересные девайсы).
Часть 1
Часть 3
Часть 4
Attention! У меня, внезапно, появились проблемы с камерой из-за чего сильно пострадало качество фото в статье — снимал на iPhone. Также текст может содержать и наверняка содержит грамматические, орфографические, пунктуационные и другие виды ошибок, включая смысловые. Я всячески прошу читателей указывать на эти ошибки и поправлять меня посредством личных сообщений. Предварительно советую ознакомиться с моим обзором квадрокоптера CXHobby CX-20 для лучшего понимания происходящего.
Контроллеру оставляю родной корпус и двусторонний вспененный скотч — он отлично гасит вибрации, а вот в ресивере решил избавиться от внешней пластиковой оболочки.
Закрепил термоклеем провод антенны, ибо родной компаунд куда-то «испарился».
И спрятал все это дело в термоусадочную трубку:
От контроллера ничего не отключал, но картинку с назначением разъемов на приемнике прилагаю.
Примеряю расположение контроллера на раме. Для удобства сделал наклейку с подписями всех портов ввода/вывода.
Моторы подключаю в соответствии со схемой на подлинный контроллера ArduPilot Mega:
ВАЖНО! При установке я повернул контроллер на 180 градусов по горизонтальной оси, но забыл указать это в параметрах, из-за чего отложил хорошеньких кирпичей при первом запуске (вертолет перевернулся в момент отрыва от земли). В Full Parameter List для параметра AHRS_ORIENTATION нужно остановить значение «yaw180», т.е. поворот по оси рыскания на 180 градусов. О подключении к компьютеру и установке ПО я еще расскажу позже.
Подсистема питания
В доноре «мозги» работают от импульсного преобразователя на MP1593. На выходе он дает стабильные 5.25 Вольт питающего напряжения. Напомню, что питания контроллеру поступает через ресивер.Я, в свою очередь, начитавшись интернетов, а именно вот эту статью от Алексея Козина о регуляторах напряжения для контроллеров APM, загорелся тоже сделать свой, с
В своей статье Алексей предлагает совместить импульсный стабилизатор для понижения основного напряжения с 3-4S АКБ до 6.3 В и линейный стабилизатор для создания требуемых для идеального питания 4.9-5 Вольт. Немного изменил схему Алексея исходя из наличия деталей:
Основное отличие — это использования иного модуля импульсного преобразователя. Ранее в магазине Eachbuyer на пробу были закуплены три модуля на микросхеме RT8272, тогда как плата с LM2596 у меня была одна. И да, не буду скрывать, что хотелось немного поупражняться в трассировке печатных плат, освежить память эксплуатации EagleCAD.
LM2940 применил в TO220 корпусе, конденсаторы — обычные электролиты вместо танталов, емкость фильтрующего конденсатор с резистивного делителя (о применении этого делителя расскажу в следующей части) понизил до 2.2uF, а на вход импульсника установил бочонок на 1000 uF. Диод от переполюсовки — здоровенный Шоттки в SMC корпусе на 3А, применить его всяко дешевле, чем ехать на радиорынок. :)
Ох, хлорное железо. Сколько я (пока дома жил) люлей от родителей за это вещество получил… Особенно, когда на ковер пол литра пролил — там до сих пор здоровенное пятно. :) Плата делалась в кустарных (общажных) условиях по технологии ЛУТ на журнальной бумаге и еле пыхтящем принтере. Кстати, несколько лет назад, когда платы делал достаточно часто легко, смывал тонер жидкостью для снятия лака, а сейчас обошел несколько комнат в общежитии и, что удивительно, ни одна жидкость не справилась. Пришлось обратно переносить тонер на глянцевую бумагу нагреванием, из-за чего в последствии не удалось нормально залудить плату. Да и подтравил немного, с непривычки.
Потом несколько фейлов вылезло во время пайки. Старайтесь не заламывать ножки у основания корпусов ТО220.
Протестировал созданный БП с разными нагрузками от 1,5А до 500 мА. 1.5А чисто ради интереса, т.к. наш линейный стаб по документации рассчитан на 1А, который и так разогревает его до порядочной и весьма забавной температуры:
И это не предел, температура продолжает расти из-за отсутствия нормального радиатора. Но мне такой ток не нужен, потребление всей-всей авионики с заделом на последующую установку OSD и телеметрии не достигает 500 мА. Итоговые характеристики:
Рекомендованный ток стабилизации: до 500 мА
Входное напряжение: аккумуляторы 3-4S, до 24В по даташиту
Вес: ~20 грамм
Дополнительные функции: делитель напряжения с АКБ для мониторинга заряда и использования FailSafe режима
Для надежности все провода у основания советую закрепить термоклеем. Еще итоговое фото:
Из девайсов закупленных намедни расскажу про пирометр. Выше уже светил его. Брал в магазине TomTop за 33 доллара при курсе гривны 20. Покупал UNI-T, потому что считаю их брендом, а в плане измерительного инструмента это важно.
На самом деле рассказывать о приборе-то и нечего особо. Он работает и работает без нареканий. Диапазон измерений температур от -20 до 400 °C. Есть лазерный указатель, подсветка дисплея, фиксация минимальной и максимальной температуры. Оптическое разрешение 12 к 1, т.е. с расстояния 12 сантиметров прибор измеряет температуру на участке диаметром 1 см. К приобретению рекомендую, для себя уже открыл кучу юзкейсов, включая диагностику неисправностей в электронике. :)
Продолжаю. Пришло время подключать самодельный гибридный стаб к бортовой сети квадрокоптера. Для надежности подпаиваюсь к контактам на распределительной плате.
И креплю модуль с нижней стороны рамы на двусторонний скотч.
С обратной стороны располагается приемник радиоаппаратуры, который по совместительству является транспортом «питания» для полетного контроллера. Дополнительно креплю все это дело большой стяжкой.
Куда деть антенну? Спрашивал на форуме — тишина. Кто-то предлагает закрепить на луч, но лично меня немножко пугает соседство с регуляторами скорости двигателей.
Прикинул расположение дополнительного индикатора состояния АКБ. В любом случае придется удлинять провода на аккумуляторе. Пищалка, кстати, неистово громкая. Покупал на DX за 3 доллара.
Удлинил провода обрезками от ESC. Да, выглядит колхозно, но снимать термоусадку с АКБ, чтобы получить доступ к контактам не хотелось, ибо где ее потом взять такую термоусадку?
Светодиоды индикации блокировки двигателей и состояния GPS «посадил» на термоклей, а провода пропустил под стяжкой, которая крепит контроллер скорости. Линзы от CX-20 тоже оставил.
Навожу марафет — укорачиваю и закрепляю провода от светодиодных модулей. Антенну временно решено оставить под одним креплением с приемником радиоуправления. Посмотрим, как будет вести себя на улице.
Аналогичные операции по укреплению провожу с контроллером и сигнальными проводами от ESC.
Промежуточный результат:
Решил проверить работу моторов, пока без калибровок и прочего. Очень долго не мог понять почему не разблокируются моторы. Откалибровал аппаратуру (об этом в следующей части), т.к. даже в серийном аппарате была проблема с дизармингом — безрезультатно. Позже дошло, что в контроллере применены какие-то защитные механизмы, которые не позволят взлететь, например, без компаса или GPS. За эту функциональность отвечает параметр «ARMING_CHECK» в программе для работы с контроллером APM (подробней об этом тоже в следующей части).
Завелся! Моторы вращаются и вращаются правильно, но при старте наблюдается небольшой рассинхрон (или у меня глюки) — будем калибровать. На сегодня все.
В третьей части (ориентировочно — понедельник) расскажу об установке и настройке телеметрии, мониторинге напряжения с АКБ, настройке FailSafe режима и калибровке всего и вся, что уже есть и первых уличных тестах.
Все интересующие вас вопросы и пожелания можно также задавать в соцсетях: Facebook, ВКонтакте, Twitter, Instagram (кстати, подписывайтесь — тут также иногда проскакивают интересные девайсы).
| +65 |
88292
40
|
| +72 |
21296
86
|
Самые обсуждаемые обзоры
| +50 |
2276
71
|
| +179 |
11256
151
|
| +43 |
2269
59
|
| +31 |
3474
129
|
За обзор и прямые руки несомненно жирный плюс!
youtu.be/dxXsuwR-7kM
Шикарный гайд. Сделай потом pdfки :)
Покрыть лаком? Но что конкретно самое простое купить в строительном маркете?
И есть ли места которые нельзя покрывать? Бародатчик например.