CXHobby CX-20 aka Quanum Nova — на что способен клон DJI Phantom?

- Цена: $279.99
- Перейти в магазин
Засилье мультикоптеров на рынке потребительской электроники схоже с нынешней волной популярности на различного рода умные носимые устройства. Способствовали этому прежде всего компании Parrot и DJI, но с разными подходами и, соответственно, итоговыми решениями. Ar.Drone, представленный французской компанией Parrot в 2010 году меня особо не заинтересовал, а вот выпущенный в 2013 году DJI Phantom заставил углубится в тему и вызвал желание приобрести нечто подобное. Для студента моего образца сумма в 500 долларов (Phantom 1-го поколения) казалась весьма затруднительной в следствии чего стартовала фаза активного поиска более дешевых, но не менее функциональных альтернатив. В итоге выбор остановился на RTF (готовом к полету из коробки) квадрокоптере CXHobby CX-20 также известном под именем Quanum Nova.
В процессе поиска круг претендентов сузился до трех аппаратов стоимостью ~300$: Walkera QR X350, Wltoys V303 и, собственно, CXHobby CX-20. Последний был выбран из-за ребрендинга оного сайтом-магазином hobbyking, а следовательно большей популярности как у наших, так и зарубежных пользователей. Были и другие претенденты с более емкими аккумуляторами, дальнобойными пультами и прочими фишками, но и цена их приближалась к стоимости второго «фантома» в минимальной комплектации.
возврата на родину успешного полета. 350 размер — это ни что иное как расстояние по диагонали между роторами двигателей (допустимы небольшие отклонения в пределах класса). Такой квадрокоптер в стандартной комплектации (аккумулятор емкостью 2700 мА*ч и пропеллеры типоразмера 8045) способен унести за собой 300 грамм полезной нагрузки при этом оставаясь в воздухе до 10 минут. При покупке следует обратить внимание на раскладку ручек управления пульта (Mode 2 и Mode 1 — субъективно и статистически удобней именно Mode 2) и полетный контроллер. Последний бывает трех типов: Open Source (он же Mini ArduPilot Mega), ZERO-версия (на 32-битном контроллере) и Big Shark (совсем уж редкая птица). Выбор, я думаю, очевиден: у APM сейчас громаднейшая база пользователей, мегабайты прошивок и мануалов, как на английском, так и на русском языке. Плюс есть ПО для настройки и расширения функциональности контроллера. 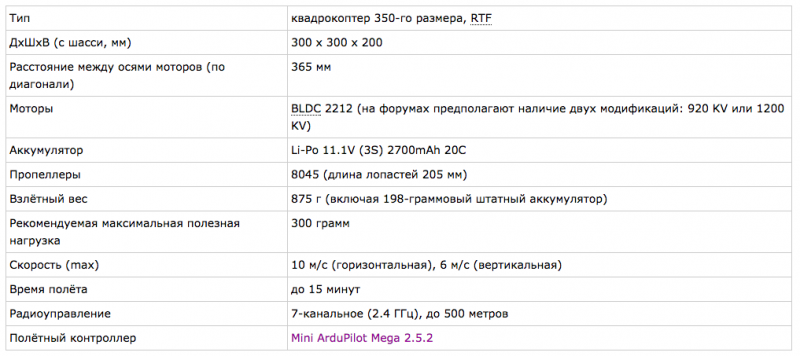
Комплектация следующая:

Ни тебе запасных пропеллеров, ни аккумуляторов. На заметку: первые пропеллеры я сломал к 4 запуску. То ли откалибровал плохо, то ли еще что, но когда стартовал с брусчатки квадрик двумя передними винтами встрял в землю и, соответственно, сломал их. Ну, и аккумулятор дополнительный тоже есть резон взять, а то выбираться на просторное место (при первых полетах желательно очень просторное, например пустырь или поле за городом) ради 10-15 минут полета как-то совсем не комильфо.
В случае с CX-20 я прямо с почты рванул к ближайшему пустырю. Первый полет у меня прошел удачно, как и два последующих, что подтверждает готовность аппарата к полету прямо из коробки. Все зависит от прямоты рук пилота, ну и фазы луны в предполетную ночь.
1. При подготовке к полету первым делом нужно установить пропеллеры. В квадрокоптере применяется 4 винта (что следует из приставки «quadro»), по два прямого и обратного вращения. Определять на глаз где какой винт в нашем случае не нужно, т.к. на пропеллерах и корпусе есть соответствующие пометки.

2. После установки винтов нужно обязательно «протянуть» гайки ключом идущим в комплекте, иначе можете лишится одного из пропеллеров прямо в полете. На фото ниже можно заметить не родные пропеллеры, а производства DJI — это те самые, купленные на скорую руку после первой аварии.

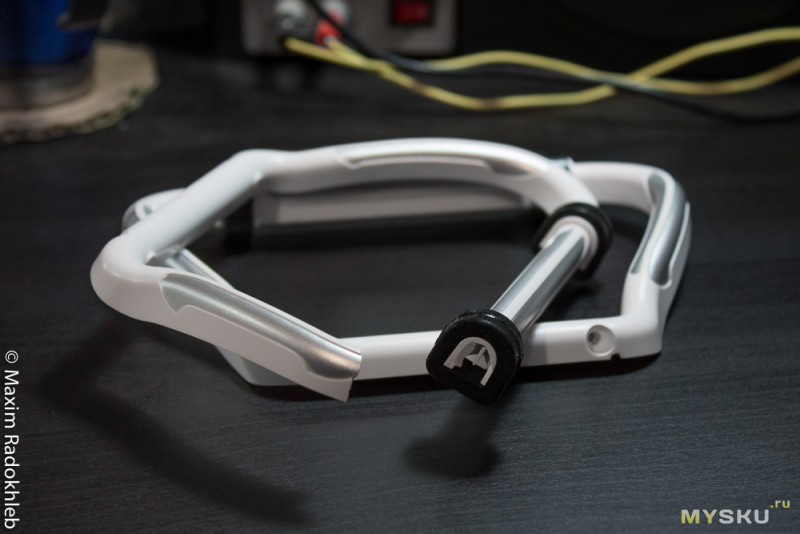
3. Устанавливаем шасси. Оное крепится посредством двух винтов. С антенной связи будьте осторожны и постарайтесь не передавить провод идущий к приемнику.
4. Производим калибровку компаса.

5. Вставляем аккумулятор в отсек и соединяем провода. За счет формы коннектора попутать полярность в нашем случае невозможно. Но претензии к такому способу подключения все же есть. Во-первых, коннектор очень тугой (можно вылечить поджав штыри плоскогубцам), а учитывая некоторые глюки с которыми вы можете столкнутся (не всегда разблокируются двигатели) отключать/подключать питание придется часто. Во-вторых, волей-неволей вспоминается подключение аккумулятора в DJI Phantom второй версии, где достаточно просто вставить аккумулятор в отсек.

6. Теперь нужно подождать пока GPS обнаружит спутники и установит соединение с оными. Ждать вплоть до 2-3 минут, пока зеленый светодиод не перестанет мигать. После замены батареи спутники определяются за считанные секунды — это называется «горячий старт».
7. Включаем аппаратуру. ВАЖНО, чтобы все тумблеры пребывали в верхнем положении, а ручка газа в нижнем. После установки соединения аппаратуры с приемником квадрокоптера (прозвучит мелодия) нужно разблокировать моторы. Для этого переведите стик газа (в Mode 2 — левый) в правое-нижнее положение. Квадрокоптер попеременно мигнет своими индикаторами.
8. Как только оба светодиода перестанут мигать — можно взлетать! Делать это рекомендуется в ручном режиме, как и садится. С последним будьте осторожны, не переводите висящий в воздухе квадрокоптер в ручной режим, если стик газа установлен в положении ниже 50%, есть вероятность «уронить» аппарат.
Для усвоение материала я снял небольшой ролик по быстрому старту и калибровке:
Если не обращать внимание на мелкие оплошности типа тугого коннектора («фантом» первого поколения, кстати, тоже такой болезнью страдает) или периодического нежелания двигателей разблокироваться, CX-20 оправдывает свой статус мультикоптера готового к полету прямо из коробки. Так что сразу с почты можно ехать на поле и осваивать управление БПЛА.
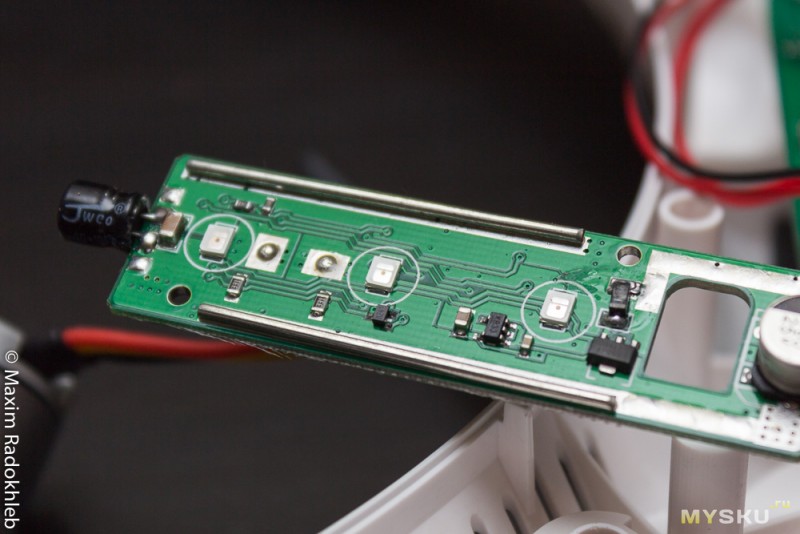
В верхней части “аппы” расположено два тумблера, комбинируя положения которых можно активировать один из 5 доступных режимов. Для большей наглядности предусмотрено 3 разноцветных индикатора.

Все остальное стандартно: две ручки управления (газ слева, т.е. Mode 2), триммеры для коррекции нейтрального положения джойстиков, кнопка включения со светодиодом индикации и 2 потенциометра для управления двухосевым подвесом (приобретается отдельно). Аппаратура работает от 4 элементов питания типа АА, будь-то Ni-MH аккумуляторы или щелочные батарейки.

1. Первый (слева направо) фиксирует угловую скорость, предоставляет информацию об углах поворота (значение угла можно получить проинтегрировав угловую скорость по времени).
2. Измеряет ускорение, используется для определения текущей ориентации квадрокоптера и коррекции показаний гироскопа по углам крена и тангажа.
3. Измеряет направление и величину магнитного поля, используется для увеличения курсовой устойчивости (удержания направления движения) и коррекции показаний датчиков по углу рыскания.
В реальности же наш IMU состоит из следующих микросхем: Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и Meas-spec MS5611 (барометр).
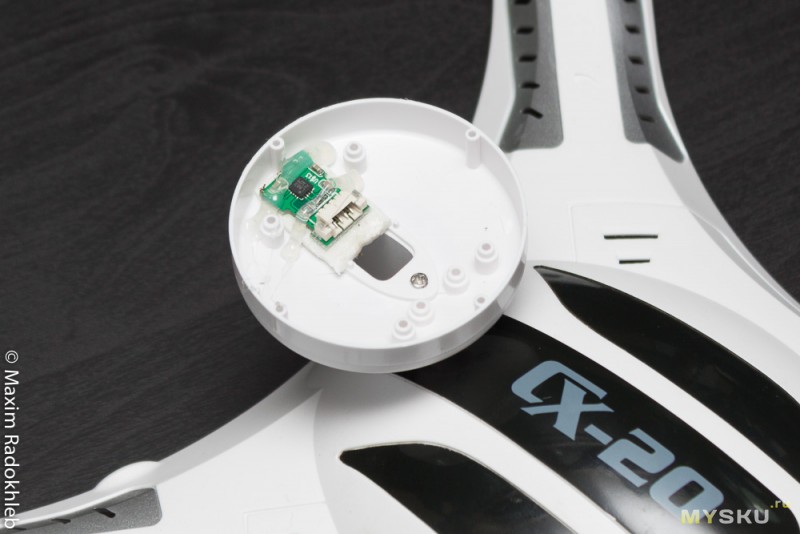
А вот цифровой компас (HMC5883L) вынесен на отдельную площадку, так называемую корпусную «антенну» дабы избежать наводок от силовых цепей. Об остальной электронике расскажу в следующей главе.
Помимо того, что нужный режим, так еще и достаточно интересный, очень драйвовый, но и рискованный одновременно. Именно в Take-Off Mode производитель рекомендует осуществлять взлет и посадку.

Все основные режимы есть, но лично я из доступных оставил бы только ручной и удержание высоты, а Return Home Mode заменил бы на полноценный возврат домой с посадкой в точку старта и возможностью перехвата управления. К слову, контроллер используемый в CX-20 позволяет нам это сделать, но об этом позже.

Всем известно, что мультироторные системы летают мало, чему виной три и больше бесколлекторных моторов с высоким потреблением энергии. Отсюда и особые требования к аккумуляторам по токоотдаче, из-за чего увеличивается их вес. Герой сегодняшнего обзора также не стал исключением, максимум, на что стоит рассчитывать это 12-13 минут полетного времени без полезной нагрузки до активации звукового уведомления о севшем аккумуляторе.
Что будет если вы проигнорирутее уведомление о разряде АКБ и продолжите полет? Теоретически, активируется второй уровень защиты и квадрокоптер автоматически сядет в месте, где защита сработала. На деле же моторы остановятся, квадрокоптер камнем устремится к земле и принесет много боли владельцу, который в очередной раз доверился «китайцам».
Мне относительно повезло. Я намеренно решил протестировать этот Failsafe-режим и оставил квадрокоптер в режиме удержания высоты посреди пустыря. Спустя ~20 минут он упал. Напряжение на аккумуляторе упало до 10 В, или по ~3.3 В на банку. Дальнейшее “гугление” показало, что защиты по питанию в этом аппарате просто физически нет, но ее можно сделать самому спаяв делитель на двух резисторах с аккумулятора на вход микроконтроллера. Подробней тут. Я пока не стал делать, в приоритете пересадить электронику на открытую раму, а потом заняться модификацией бортовой электроники.
Все это происходило в субботу, на носу был еще один выходной и непреодолимое желание летать. Вооружившись термоклеем и кабельными стяжками принялся за дело. Сначала просверлил отверстия в крышке корпуса:

Склеил половинки термоклеем и дал застыть, после чего укрепил все это дело стяжками. Отчасти рукожопство, да, но шов получился хорошим и аппарат до сих пор летает в таком состоянии.

Сложнее было с одним из лучей. Из-за поломки в районе вентиляционных отверстий нормально склеить пластик не представлялось возможным, поэтому тут конструкция получилась менее надежной, но, тьфу-тьфу-тьфу, достаточно крепкой для полетов.

Все воскресенье я спокойно отелтал, периодически бегая от дома к пустырю и обратно (проверил Failsafe-режим при потере связи с пультом управления — он работает хорошо). Заряжается аккумулятор порядка 3 часов о чем сигнализирует погасший красный светодиод на ЗУ. Ничего, опять же, не предвещало беды, но вечером, в четвертом за день полете, квадрокоптер начал сигнализировать о разряженной АКБ уже к 4 минуте пребывания в воздухе. Не стал рисковать, пришел домой, замерил напряжение: 3.7 В на банку. Хм, и вправду севший. На следующий день ситуация повторилась. Видимо сдох аккумулятор, пусть и не вздулся, но в емкости и токоотдачи, внезапно, потерял. Что послужило причиной: брак аккумулятора или «игрушечное» ЗУ на которое повсеместно жалуются юзеры — не понятно. Понятно то, что нужно покупать новый аккумулятор и нормальное ЗУ, типа iMAX B6.

Автономность стандартна для такого рода устройств (при условии «здорового» аккумулятора), поэтому к минусам причислять оную не вижу смысла. Нужно больше полтеного времени — приобретайте более емкую батарею. Максимум, что влезет в наш отсек — это 3000 mAh (3S и минимум 20C по токоотдаче). А вот за отсутвие режима защиты при низком уровне АКБ хотелось бы влепить этим же квадрокоптером человеку, который его проектировал. И ладно, если бы этой функции заявлено не было, но в инструкции черным по белому написано о втором уровне защиты — автоматическом приземлении.

В том, что аппарат взлетит у меня не возникало сомнения, более того с такой нагрузкой он уверенно себя чувствовал в воздухе и незамедлительно выполнял все команды пилота. Другое дело, что автономность снизилась до совсем уж низкого уровня и максимум чего мне удалось достичь это 5 минут до активации «пищалки». В Mission Planer (ПО для настройки контроллера) можно изменить напряжение при котором активируется сигнализация хотя бы до 3.5 В тем самым продлив время полета может быть еще на минуту. Стоит также учесть и потребление передатчика видеосигнала, если таковой планируется использовать. Следуя сообщениям на местных и зарубежных форумах время полета с FPV в лице GoPro (на фиксированном подвесе) составляет порядка 8-9 минут.

Тут же объявился еще один недостаток конструкции китайского аппарата. При переключении в воздухе режима с GPS на ручной я немного расслабился и увел ручку газа ниже половины (моя вина, да), благо аппарат был на небольшой высоте и обошлось всего лишь жестким приземлением, в результате которого сломалось одна из ног. Шасси — одно из самых уязвимых мест CX-20, ломаются они часто, т.к. не всегда удается идеально посадить квадрокоптер, особенно в ветреную погоду.
Но запас сятжек и изоленты у меня достаточно большой. :)

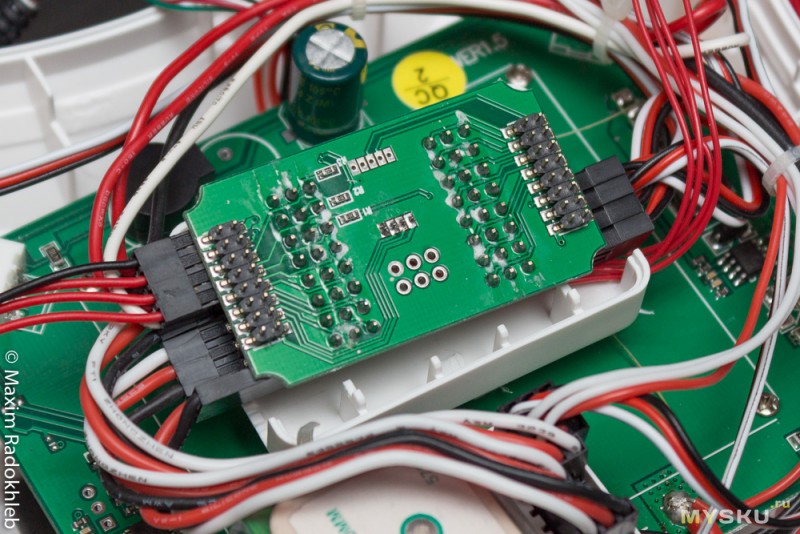
Чтобы нормально следить за напряжением на АКБ или положением квадрокоптера в пространстве можно докупить и подключить телеметрию. Цена стандартного набора колеблется в районе 30 долларов. Одну плату подключаем к «мозгам» квадрокоптера (пять прямоугольных пятачков по центру), а вторую в USB вашего компьютера.
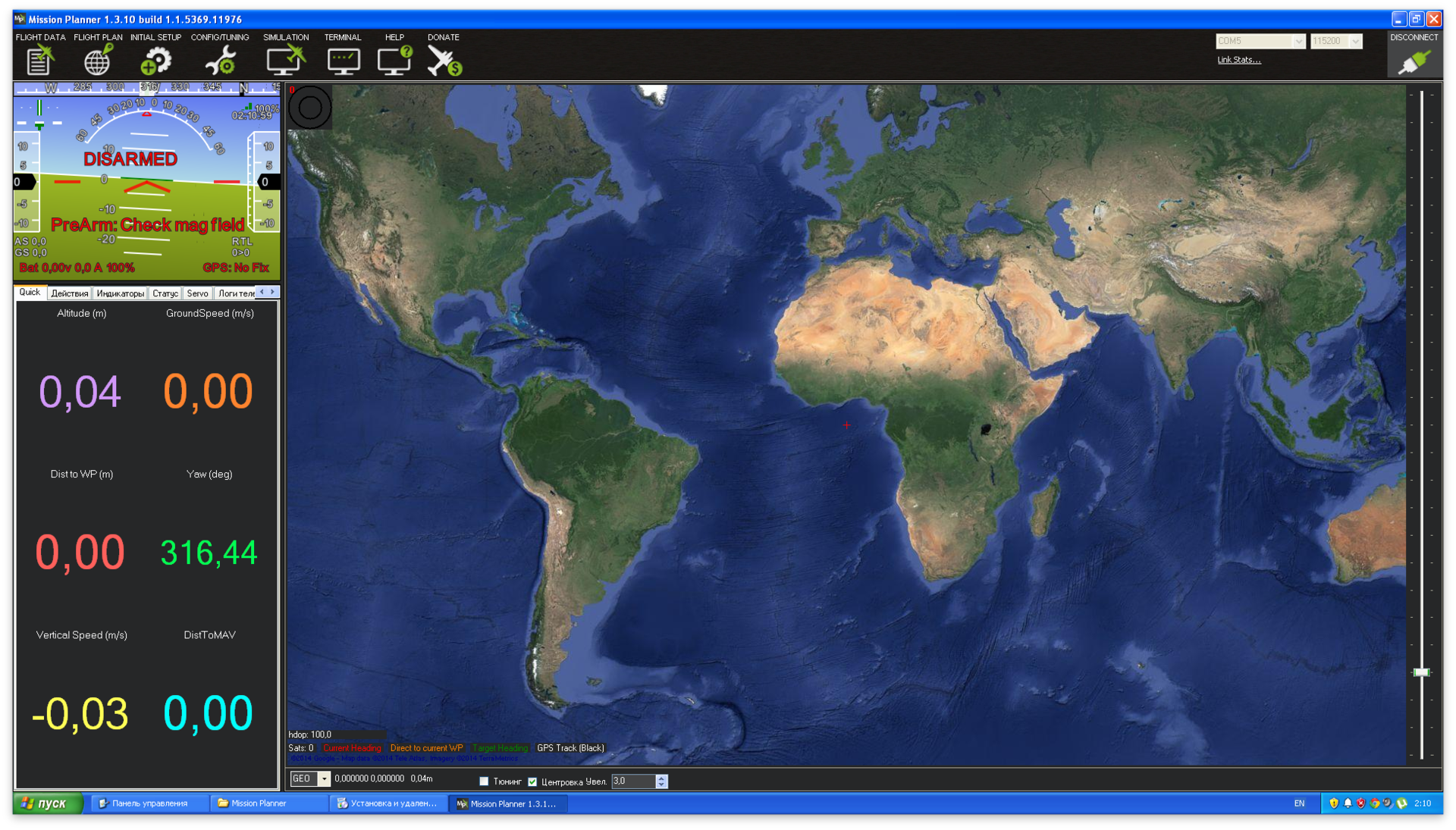
После чего посредством соответствующего ПО можем мониторить состояние нашего летательного аппарата удаленно. Вот так это выглядит:
В комплекте с квадрокоптером поставляется крепление для GoPro c виброразвязкой, но если хочется хоть сколько нибудь плавной картинки придется докупить подвес стабилизирующий камеру по двум/трем осям. Несмотря на большие возможности в плане кастомизации квадрокоптера все упирается в автономность, чем тяжелее наш аппарат, тем меньше время полета, плюс потребление энергии дополнительными модулями.

Общий вид квадрокоптера сверху. На большой печатной плате, которая играет роль распределителя питания установлены: ArduPilot Mega 2.5.2 (белая коробочка в центре, мозги квадрокоптера) и связка из приемника радиоуправления и GPS-моудля с антенной (слева).

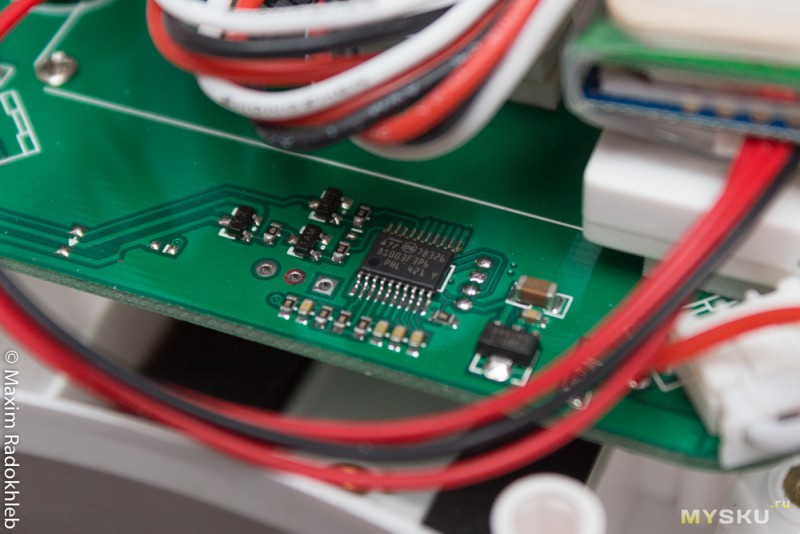
В распредплату интегрирован понижающий преобразователь (MP1593) для питания всей бортовой электроники.
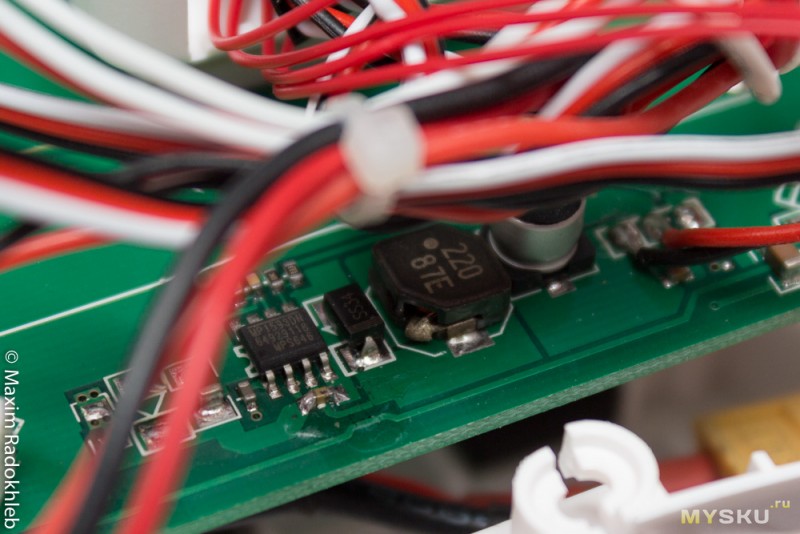
И микроконтроллер STM8S003F3. Именно он управляет зуммером (пищалкой) и габаритными светодиодами. Теперь понятно почему у CXHobby CX-20 не работает Failsafe-режим при низком уровне заряда аккумулятора. Силовая часть и полетный контроллер максимально развязаны, а мониторингом напряжения на аккумуляторе и вовсе занимается отдельный микроконтроллер, который никак не связан с «мозгами».
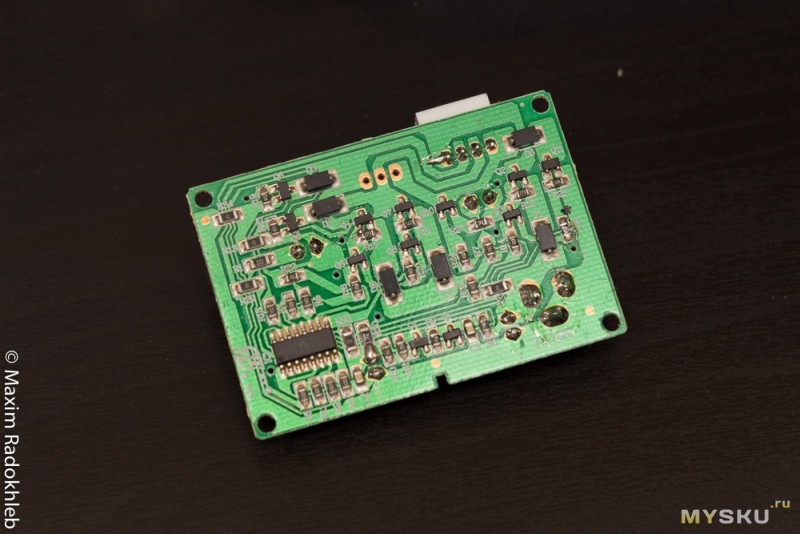
Под регуляторами (ESC) расположены вентиляценные отверстия. С одной стороны необходимые, потому что полевые транзисторы имеют свойство нагреваться под нагрузкой, а с другой стороны не очень, т.к. уменьшается общая жесткость конструкции.

ESC с обратной стороны. Для лучшего отвода тепла от полевых транзисторов (в нашем случае TPCA8057-H) к печатной плате припаяно два металлических прута.
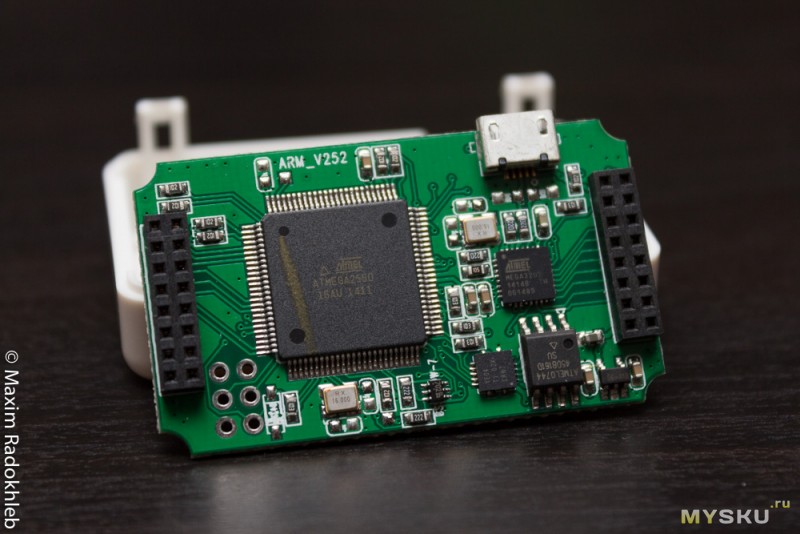
Полетный контроллер — это своеобразный бутерброд из двух плат. Собственное верхнюю часть оной я вам уже показывал, в самом начале, когда мы говорили об используемых датчиках. Если разделить бутерброд на две части, то с его внутренней стороны можно заметить: микроконтроллеры ATmega2560 (основной контроллер) и ATmega32U2 (отвечает за USB-интерфейс, PPM-энкодер), EEPROM-память AT28C256 и TXB0104 (согласователь логических уровней между датчиками, которые питаются от 3.3 Вольт и контроллером, которому нужно 5 В).
Печатная плата комплектного ЗУ. Выполнена на одностороннем текстолите и, надо признать, спаяна весьма похабно.
Аппаратура управления:
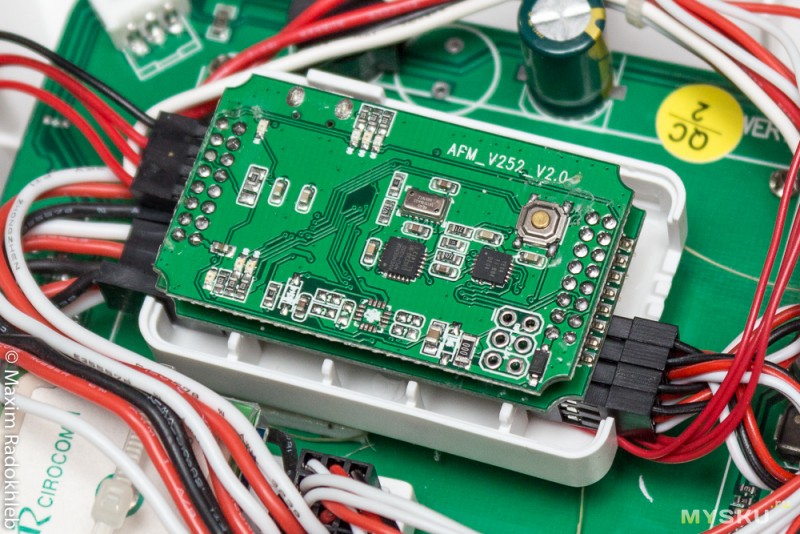
Внутри все сделано хорошо, провода стянуты, а корпуса бортовых модулей дополнительно закреплены стяжками. К пайке также притенизй нет, в местах где протекают большие токи производитель припоя не пожалел, за что ему спасибо.

Главную страницу программы Mission Planner я уже демонстрировал — она представляет из себя карту, на которой можно посмотреть передвижение мультикоптера или задать точки для автономного полета. Слева — импровизированная приборная панель и окошко с большим количеством информационных вкладок, перечисление которых требует отдельного материала. Сильно интересующихся или владельцев схожих устройств уже с этой точки можно отправлять к официальному мануалу на ArduPilot Mega (русский и английский). Чтобы подключится к MP нужно включить аппаратуру, снять пропеллеры с моторов и подключить аккумулятор (можно и без оного, но тогда квадрокоптер будет “разрываться” по поводу севшей АКБ). В левом верхнем углу выбираем порт, к которому подсоединен квадрокоптер, скорость обмена данными устанавливаем 57600 бод и «коннектимся».
Не пытайтесь сразу обновлять программное обеспечение или что-то менять. В первую очередь рекомендуется сделать резервную копию всех настроек контроллера. Для этого нужно пройти по следующему пути CONFIG/TUNING -> Full Parameter List -> OK -> Save (кнопка в правой колонке). И сохраняете куда нибудь в облако, для надежности. После чего вам открывается полный перечень параметров значение которых можно изменять.
Главное не забыть нажать Write Params после проведенных манипуляций. Сказать честно, далеко я в тему настроек контроллера не углублялся и полет по точкам еще не организовывал, но в интернете уже полно инструкций по работе с нашим квадрокоптером в MP, планировании полета по точкам и его реализации. Там же несколько примеров тюнинга квадрокоптера. К слову о тюнинге, помимо того, что в самой программе можно переназначить включение режимов на разные положения тумблеров, народные умельцы скрестили пульт с Arduino и небольшой клавиатурой для упрощения выбора полетного режима.
— Полетный контроллер с открытым исходным кодом и возможностью настройки большинства параметров
— Полный набор сенсоров для уверенной стабилизации квадрокоптера в воздухе
— Тугой коннектор питания
— Хрупкое шасси
— Не всегда срабатывает разблокировка двигателей
— Отсутсвие failsafe-режима по питанию
— Вероятность брака компонентов выше чем у DJI (особенно по части АКБ)
Обсуждение CX-20 и Quanum Nova на форуме RCdesign
Обсуждение на RCgroups (англ.)
Квадрокоптер на официальном сайте
Альтернативная инструкция по запуску CX-20 на русском языке
База знаний ArduPilot Mega
Краткий FAQ по первому вылету CX-20
ладно, пролистав) эту статью вы наверное задумались, а стал бы автор чисто из любви к подобного рода устройствам тратить свое время на ее написание? Лично я без какого-либо профита не стал бы. Данный квадрокоптер я приобрел в магазине TinyDeal с 50% скидкой за ссылку на их магазин. Ссылка не реферальная — она полностью дублирует ту, что в шапке.
Если таки решились обзавестись этим или подобным устройством, то сразу берите несколько запасных аккумуляторов, побольше пропеллеров и защиту оных. Последняя понадобиться каким бы пряморуким вы не были: при неудачном взлете/посадке, испытаниях в домашних условиях или городских полетах, которых лучше и вовсе избегать.

Все вопросы можно задать в комментариях или же отправлять в ВКонтакте. Twitter и Facebook тоже есть, но быструю реакцию в этих соц. сетях не обещаю. Традиционного фото домашних животных тоже не будет, а хотелось бы… =/
В процессе поиска круг претендентов сузился до трех аппаратов стоимостью ~300$: Walkera QR X350, Wltoys V303 и, собственно, CXHobby CX-20. Последний был выбран из-за ребрендинга оного сайтом-магазином hobbyking, а следовательно большей популярности как у наших, так и зарубежных пользователей. Были и другие претенденты с более емкими аккумуляторами, дальнобойными пультами и прочими фишками, но и цена их приближалась к стоимости второго «фантома» в минимальной комплектации.
Технические характеристики
CXHobby CX-20 — представитель семейства квадрокоптеров 350-го размера. Аппарат из коробки обладает всем необходимым для старта иРаспаковка и быстрый старт
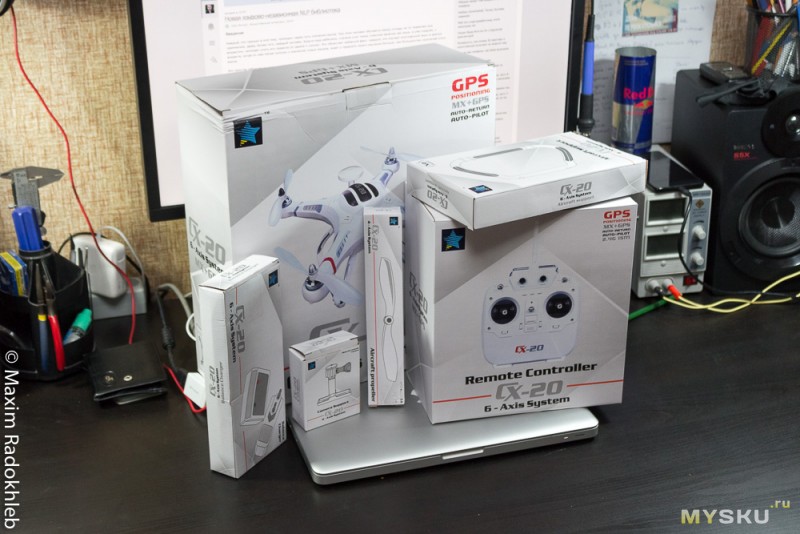
Поставляется дрон в большой картонной упаковке заполненной коробками под каждый из модулей комплекта. Путешествие из Китая в Украину аппарат пережил без каких-либо повреждений.Комплектация следующая:
- Квадрокоптер
- Аппаратура управления
- Аккумулятор
- Зарядное устройство и блок питания для оного
- Крепления для GoPro с виброразвязкой
- 4 пропеллера (8045)
- Посадочное шасси
- Инструкция, CD-диск, отвертка и ключ для установки винтов
Ни тебе запасных пропеллеров, ни аккумуляторов. На заметку: первые пропеллеры я сломал к 4 запуску. То ли откалибровал плохо, то ли еще что, но когда стартовал с брусчатки квадрик двумя передними винтами встрял в землю и, соответственно, сломал их. Ну, и аккумулятор дополнительный тоже есть резон взять, а то выбираться на просторное место (при первых полетах желательно очень просторное, например пустырь или поле за городом) ради 10-15 минут полета как-то совсем не комильфо.
В случае с CX-20 я прямо с почты рванул к ближайшему пустырю. Первый полет у меня прошел удачно, как и два последующих, что подтверждает готовность аппарата к полету прямо из коробки. Все зависит от прямоты рук пилота, ну и фазы луны в предполетную ночь.
1. При подготовке к полету первым делом нужно установить пропеллеры. В квадрокоптере применяется 4 винта (что следует из приставки «quadro»), по два прямого и обратного вращения. Определять на глаз где какой винт в нашем случае не нужно, т.к. на пропеллерах и корпусе есть соответствующие пометки.
2. После установки винтов нужно обязательно «протянуть» гайки ключом идущим в комплекте, иначе можете лишится одного из пропеллеров прямо в полете. На фото ниже можно заметить не родные пропеллеры, а производства DJI — это те самые, купленные на скорую руку после первой аварии.
3. Устанавливаем шасси. Оное крепится посредством двух винтов. С антенной связи будьте осторожны и постарайтесь не передавить провод идущий к приемнику.
4. Производим калибровку компаса.
Как выполнить калибровку
1. Вставляем аккумулятор и соединяем разъемы.
2. Включаем аппаратуру управления и переводим правый стик в нижнее-правое положение. На все про все есть 5 секунд, по истечению которых режим калибровки перестанет быть доступным и придется вернутся к первому пункту.
3. Дождитесь пока левый индикатор начнет попеременно мигать красным и желтым цветом. Постоянное свечение правого светодиода ожидать не обязательно.
4. Собственно сама калибровка. Возьмите квадрокоптер «носом от себя» и повернитесь вокруг своей оси 3-5 раз, затем опустите нос коптера и совершите еще 3-5 оборотов*. Направление вращения роли не играет.
5. Опускаем квадрокоптер на землю и отключаем питание(!). Не обращайте внимание на продолжающий мигать красно-желтый светодиод — просто отключите питание и все настройки сохранятся автоматически.
*Этот вид калибровки более свойственный DJI Phantom с его полетным контроллером Naza. APM же принято калибровать следующим образом. И да, при калибровке старайтесь минимизировать влияние магнитных помех (электросети, автомобили и любые другие устройства генерирующие магнитные поля).
2. Включаем аппаратуру управления и переводим правый стик в нижнее-правое положение. На все про все есть 5 секунд, по истечению которых режим калибровки перестанет быть доступным и придется вернутся к первому пункту.
3. Дождитесь пока левый индикатор начнет попеременно мигать красным и желтым цветом. Постоянное свечение правого светодиода ожидать не обязательно.
4. Собственно сама калибровка. Возьмите квадрокоптер «носом от себя» и повернитесь вокруг своей оси 3-5 раз, затем опустите нос коптера и совершите еще 3-5 оборотов*. Направление вращения роли не играет.
5. Опускаем квадрокоптер на землю и отключаем питание(!). Не обращайте внимание на продолжающий мигать красно-желтый светодиод — просто отключите питание и все настройки сохранятся автоматически.
*Этот вид калибровки более свойственный DJI Phantom с его полетным контроллером Naza. APM же принято калибровать следующим образом. И да, при калибровке старайтесь минимизировать влияние магнитных помех (электросети, автомобили и любые другие устройства генерирующие магнитные поля).
5. Вставляем аккумулятор в отсек и соединяем провода. За счет формы коннектора попутать полярность в нашем случае невозможно. Но претензии к такому способу подключения все же есть. Во-первых, коннектор очень тугой (можно вылечить поджав штыри плоскогубцам), а учитывая некоторые глюки с которыми вы можете столкнутся (не всегда разблокируются двигатели) отключать/подключать питание придется часто. Во-вторых, волей-неволей вспоминается подключение аккумулятора в DJI Phantom второй версии, где достаточно просто вставить аккумулятор в отсек.
6. Теперь нужно подождать пока GPS обнаружит спутники и установит соединение с оными. Ждать вплоть до 2-3 минут, пока зеленый светодиод не перестанет мигать. После замены батареи спутники определяются за считанные секунды — это называется «горячий старт».
7. Включаем аппаратуру. ВАЖНО, чтобы все тумблеры пребывали в верхнем положении, а ручка газа в нижнем. После установки соединения аппаратуры с приемником квадрокоптера (прозвучит мелодия) нужно разблокировать моторы. Для этого переведите стик газа (в Mode 2 — левый) в правое-нижнее положение. Квадрокоптер попеременно мигнет своими индикаторами.
8. Как только оба светодиода перестанут мигать — можно взлетать! Делать это рекомендуется в ручном режиме, как и садится. С последним будьте осторожны, не переводите висящий в воздухе квадрокоптер в ручной режим, если стик газа установлен в положении ниже 50%, есть вероятность «уронить» аппарат.
Для усвоение материала я снял небольшой ролик по быстрому старту и калибровке:
Если не обращать внимание на мелкие оплошности типа тугого коннектора («фантом» первого поколения, кстати, тоже такой болезнью страдает) или периодического нежелания двигателей разблокироваться, CX-20 оправдывает свой статус мультикоптера готового к полету прямо из коробки. Так что сразу с почты можно ехать на поле и осваивать управление БПЛА.
Стандартные полетные режимы
Оных «из коробки» пять. Это если не считать защиту (Fail-safe режимы) от потери сигнала GPS спутников или связи с приемником. Fail-safe режима при критическом уровне заряда АКБ нет, хоть таковой и заявлен в характеристиках. О последствиях отсутствия последнего я еще расскажу позже.В верхней части “аппы” расположено два тумблера, комбинируя положения которых можно активировать один из 5 доступных режимов. Для большей наглядности предусмотрено 3 разноцветных индикатора.
Все остальное стандартно: две ручки управления (газ слева, т.е. Mode 2), триммеры для коррекции нейтрального положения джойстиков, кнопка включения со светодиодом индикации и 2 потенциометра для управления двухосевым подвесом (приобретается отдельно). Аппаратура работает от 4 элементов питания типа АА, будь-то Ni-MH аккумуляторы или щелочные батарейки.
Ручной режим (Take-Off Mode)
Он же полуавтоматический. Для стабилизации квадрокоптера используется 9-осевой гиростабилизатор (IMU) и барометр (для измерения высоты и удержания коптера на этой самой высоте). Гиростабилизатор состоит из 3 MEMS-сенсоров: гироскопа, акселерометра и магнитометра (цифровой компас).1. Первый (слева направо) фиксирует угловую скорость, предоставляет информацию об углах поворота (значение угла можно получить проинтегрировав угловую скорость по времени).
2. Измеряет ускорение, используется для определения текущей ориентации квадрокоптера и коррекции показаний гироскопа по углам крена и тангажа.
3. Измеряет направление и величину магнитного поля, используется для увеличения курсовой устойчивости (удержания направления движения) и коррекции показаний датчиков по углу рыскания.
В реальности же наш IMU состоит из следующих микросхем: Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и Meas-spec MS5611 (барометр).
А вот цифровой компас (HMC5883L) вынесен на отдельную площадку, так называемую корпусную «антенну» дабы избежать наводок от силовых цепей. Об остальной электронике расскажу в следующей главе.
Помимо того, что нужный режим, так еще и достаточно интересный, очень драйвовый, но и рискованный одновременно. Именно в Take-Off Mode производитель рекомендует осуществлять взлет и посадку.
Удержание позиции (GPS Mode)
В работу включается GPS-модуль. Почти такой же как у вас в телефоне, только с большой керамической антенной. В GPS Mode квадрокоптер старается удерживать позицию. Режим ужасно скучный, так как на движение стиков аппарат реагирует с запозданием, а углы крена и тангажа ограничены 15-20 градусами из-за чего значительно снижается скорость полета.Удержание направления (Orientation Mode)
Новички часто сталкиваются с проблемой зеркального управления квадрокоптером, когда тот направлен носом в сторону пилота. Отчасти эта проблема решается установкой FPV-системы или включением режима удержания направления (в реальности же лучше освоить зеркальное управление — пригодится в экстренных ситуациях). В каком положении вы включите этот режим там и будет у квадрокоптера нос и если вы даете команду лететь вперёд по горизонтали, то он улетит от вас даже если повернут носом к вам. Главное при выключении Orientation Mode оказаться позади квадрокоптера иначе управление инвертируется.Удержание высоты (Altitude Hold Mode)
Мой любимый режим. Взлетаем в ручном режиме до высоты на которой хотим продолжить полет и включаем Altitude Hold Mode. Когда ручка газа в центре — аппарат держит высоту самостоятельно, при этом за пилотом остается возможность контролировать набор высоты или снижение. Аппарат достаточно резвый и летать в целом приятно. Именно в этом режиме у меня лучше всего получается крутить горизонтальную восьмерку. :)Возврат «домой» (Return Home Mode)
Если аппарат улетел слишком далеко, а вы летаете без FPV или просто лень вручную возвращать аппарат домой предусмотрен Return Home Mode. Квадрокоптер сам поднимется (или опустится) на высоту 20 метров и вернется в точку старта ожидая дальнейших действий со стороны пилота. Для отмены RTH необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». ВАЖНО еще в процессе подготовки к полету дождаться постоянного свечения зеленого светодиода (сигнализирует о подключении к спутникам GPS), иначе квадрокоптер реально может в сторону Китая улететь.Все основные режимы есть, но лично я из доступных оставил бы только ручной и удержание высоты, а Return Home Mode заменил бы на полноценный возврат домой с посадкой в точку старта и возможностью перехвата управления. К слову, контроллер используемый в CX-20 позволяет нам это сделать, но об этом позже.
Автономность и Failsafe-режимы
В комплект поставки входят: аккумулятор емкостью 2700 mAh (3S, 20C), зарядное устройство и блок питания для оного (15 В, 800 мА).Всем известно, что мультироторные системы летают мало, чему виной три и больше бесколлекторных моторов с высоким потреблением энергии. Отсюда и особые требования к аккумуляторам по токоотдаче, из-за чего увеличивается их вес. Герой сегодняшнего обзора также не стал исключением, максимум, на что стоит рассчитывать это 12-13 минут полетного времени без полезной нагрузки до активации звукового уведомления о севшем аккумуляторе.
Что будет если вы проигнорирутее уведомление о разряде АКБ и продолжите полет? Теоретически, активируется второй уровень защиты и квадрокоптер автоматически сядет в месте, где защита сработала. На деле же моторы остановятся, квадрокоптер камнем устремится к земле и принесет много боли владельцу, который в очередной раз доверился «китайцам».
Мне относительно повезло. Я намеренно решил протестировать этот Failsafe-режим и оставил квадрокоптер в режиме удержания высоты посреди пустыря. Спустя ~20 минут он упал. Напряжение на аккумуляторе упало до 10 В, или по ~3.3 В на банку. Дальнейшее “гугление” показало, что защиты по питанию в этом аппарате просто физически нет, но ее можно сделать самому спаяв делитель на двух резисторах с аккумулятора на вход микроконтроллера. Подробней тут. Я пока не стал делать, в приоритете пересадить электронику на открытую раму, а потом заняться модификацией бортовой электроники.
Все это происходило в субботу, на носу был еще один выходной и непреодолимое желание летать. Вооружившись термоклеем и кабельными стяжками принялся за дело. Сначала просверлил отверстия в крышке корпуса:
Склеил половинки термоклеем и дал застыть, после чего укрепил все это дело стяжками. Отчасти рукожопство, да, но шов получился хорошим и аппарат до сих пор летает в таком состоянии.
Сложнее было с одним из лучей. Из-за поломки в районе вентиляционных отверстий нормально склеить пластик не представлялось возможным, поэтому тут конструкция получилась менее надежной, но, тьфу-тьфу-тьфу, достаточно крепкой для полетов.
Все воскресенье я спокойно отелтал, периодически бегая от дома к пустырю и обратно (проверил Failsafe-режим при потере связи с пультом управления — он работает хорошо). Заряжается аккумулятор порядка 3 часов о чем сигнализирует погасший красный светодиод на ЗУ. Ничего, опять же, не предвещало беды, но вечером, в четвертом за день полете, квадрокоптер начал сигнализировать о разряженной АКБ уже к 4 минуте пребывания в воздухе. Не стал рисковать, пришел домой, замерил напряжение: 3.7 В на банку. Хм, и вправду севший. На следующий день ситуация повторилась. Видимо сдох аккумулятор, пусть и не вздулся, но в емкости и токоотдачи, внезапно, потерял. Что послужило причиной: брак аккумулятора или «игрушечное» ЗУ на которое повсеместно жалуются юзеры — не понятно. Понятно то, что нужно покупать новый аккумулятор и нормальное ЗУ, типа iMAX B6.
Автономность стандартна для такого рода устройств (при условии «здорового» аккумулятора), поэтому к минусам причислять оную не вижу смысла. Нужно больше полтеного времени — приобретайте более емкую батарею. Максимум, что влезет в наш отсек — это 3000 mAh (3S и минимум 20C по токоотдаче). А вот за отсутвие режима защиты при низком уровне АКБ хотелось бы влепить этим же квадрокоптером человеку, который его проектировал. И ладно, если бы этой функции заявлено не было, но в инструкции черным по белому написано о втором уровне защиты — автоматическом приземлении.
Грузоподъемность, аксессуары и модификации
Многих, наверное, интересует, а сколько за собой может утащить квадрокоптер? Имею ввиду не денег, а полезной нагрузки. Хотя бы GoPro с подвесом или какую легкую беззеркалку? К сожалению action-камеры у меня нету, как в прочем и беззеркалки, поэтому решено было прицепить к аппарату первое, что под руку попадется. А попалась вспышка от зеркалки. С комплектом Ni-MH аккумуляторов ее вес составляет 425 грамм, что приблизительно равняется весу беззеркалки с видеопередатчиком (без оного летать с камерой не вижу смысла).В том, что аппарат взлетит у меня не возникало сомнения, более того с такой нагрузкой он уверенно себя чувствовал в воздухе и незамедлительно выполнял все команды пилота. Другое дело, что автономность снизилась до совсем уж низкого уровня и максимум чего мне удалось достичь это 5 минут до активации «пищалки». В Mission Planer (ПО для настройки контроллера) можно изменить напряжение при котором активируется сигнализация хотя бы до 3.5 В тем самым продлив время полета может быть еще на минуту. Стоит также учесть и потребление передатчика видеосигнала, если таковой планируется использовать. Следуя сообщениям на местных и зарубежных форумах время полета с FPV в лице GoPro (на фиксированном подвесе) составляет порядка 8-9 минут.
Тут же объявился еще один недостаток конструкции китайского аппарата. При переключении в воздухе режима с GPS на ручной я немного расслабился и увел ручку газа ниже половины (моя вина, да), благо аппарат был на небольшой высоте и обошлось всего лишь жестким приземлением, в результате которого сломалось одна из ног. Шасси — одно из самых уязвимых мест CX-20, ломаются они часто, т.к. не всегда удается идеально посадить квадрокоптер, особенно в ветреную погоду.
Но запас сятжек и изоленты у меня достаточно большой. :)
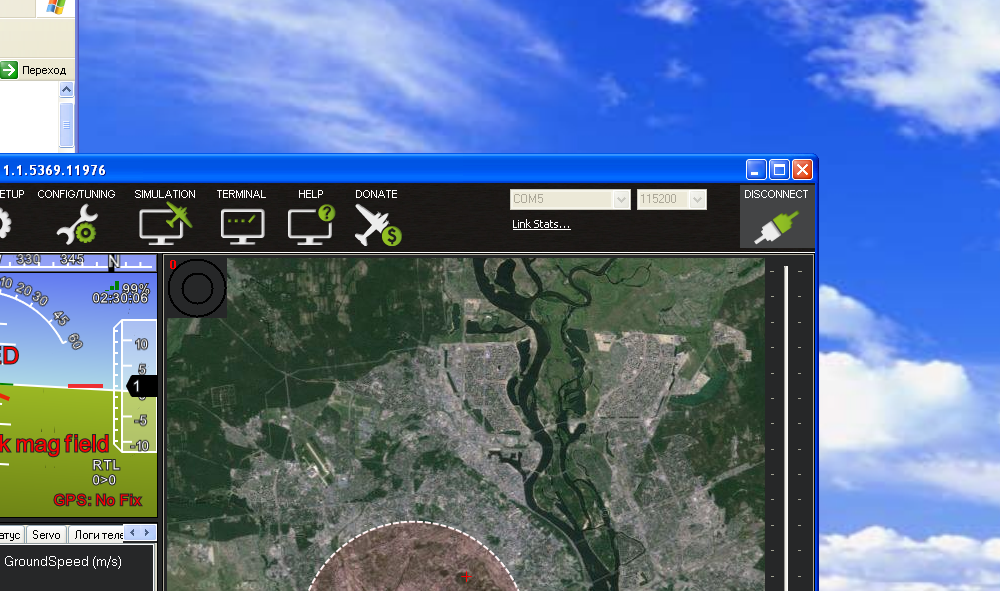
Чтобы нормально следить за напряжением на АКБ или положением квадрокоптера в пространстве можно докупить и подключить телеметрию. Цена стандартного набора колеблется в районе 30 долларов. Одну плату подключаем к «мозгам» квадрокоптера (пять прямоугольных пятачков по центру), а вторую в USB вашего компьютера.
После чего посредством соответствующего ПО можем мониторить состояние нашего летательного аппарата удаленно. Вот так это выглядит:
В комплекте с квадрокоптером поставляется крепление для GoPro c виброразвязкой, но если хочется хоть сколько нибудь плавной картинки придется докупить подвес стабилизирующий камеру по двум/трем осям. Несмотря на большие возможности в плане кастомизации квадрокоптера все упирается в автономность, чем тяжелее наш аппарат, тем меньше время полета, плюс потребление энергии дополнительными модулями.
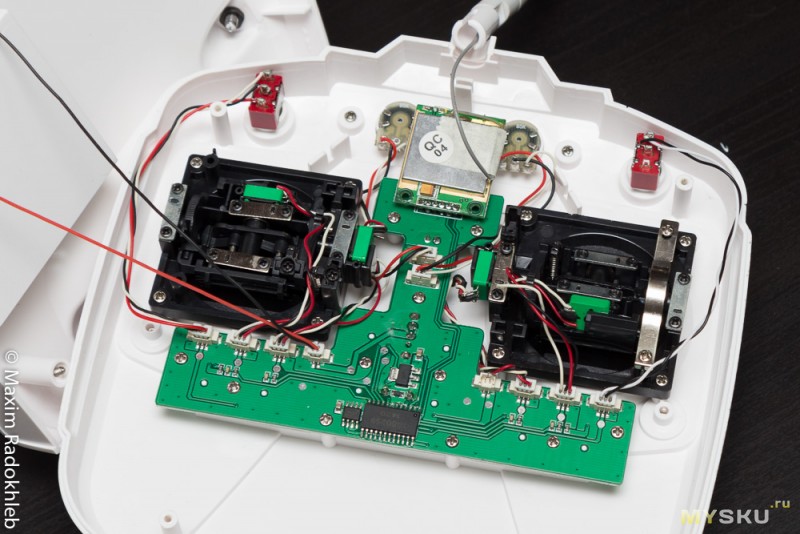
Кишки-потрошки
Разбирается CX-20 путем откручивания 12 больших и еще 4 маленьких шестигранных винтов по всему периметру нижней части корпуса (+ винтик под крышкой батарейного отсека).Общий вид квадрокоптера сверху. На большой печатной плате, которая играет роль распределителя питания установлены: ArduPilot Mega 2.5.2 (белая коробочка в центре, мозги квадрокоптера) и связка из приемника радиоуправления и GPS-моудля с антенной (слева).
В распредплату интегрирован понижающий преобразователь (MP1593) для питания всей бортовой электроники.
И микроконтроллер STM8S003F3. Именно он управляет зуммером (пищалкой) и габаритными светодиодами. Теперь понятно почему у CXHobby CX-20 не работает Failsafe-режим при низком уровне заряда аккумулятора. Силовая часть и полетный контроллер максимально развязаны, а мониторингом напряжения на аккумуляторе и вовсе занимается отдельный микроконтроллер, который никак не связан с «мозгами».
Под регуляторами (ESC) расположены вентиляценные отверстия. С одной стороны необходимые, потому что полевые транзисторы имеют свойство нагреваться под нагрузкой, а с другой стороны не очень, т.к. уменьшается общая жесткость конструкции.
ESC с обратной стороны. Для лучшего отвода тепла от полевых транзисторов (в нашем случае TPCA8057-H) к печатной плате припаяно два металлических прута.
Полетный контроллер — это своеобразный бутерброд из двух плат. Собственное верхнюю часть оной я вам уже показывал, в самом начале, когда мы говорили об используемых датчиках. Если разделить бутерброд на две части, то с его внутренней стороны можно заметить: микроконтроллеры ATmega2560 (основной контроллер) и ATmega32U2 (отвечает за USB-интерфейс, PPM-энкодер), EEPROM-память AT28C256 и TXB0104 (согласователь логических уровней между датчиками, которые питаются от 3.3 Вольт и контроллером, которому нужно 5 В).
Печатная плата комплектного ЗУ. Выполнена на одностороннем текстолите и, надо признать, спаяна весьма похабно.
Аппаратура управления:
Внутри все сделано хорошо, провода стянуты, а корпуса бортовых модулей дополнительно закреплены стяжками. К пайке также притенизй нет, в местах где протекают большие токи производитель припоя не пожалел, за что ему спасибо.
Подключение к компьютеру
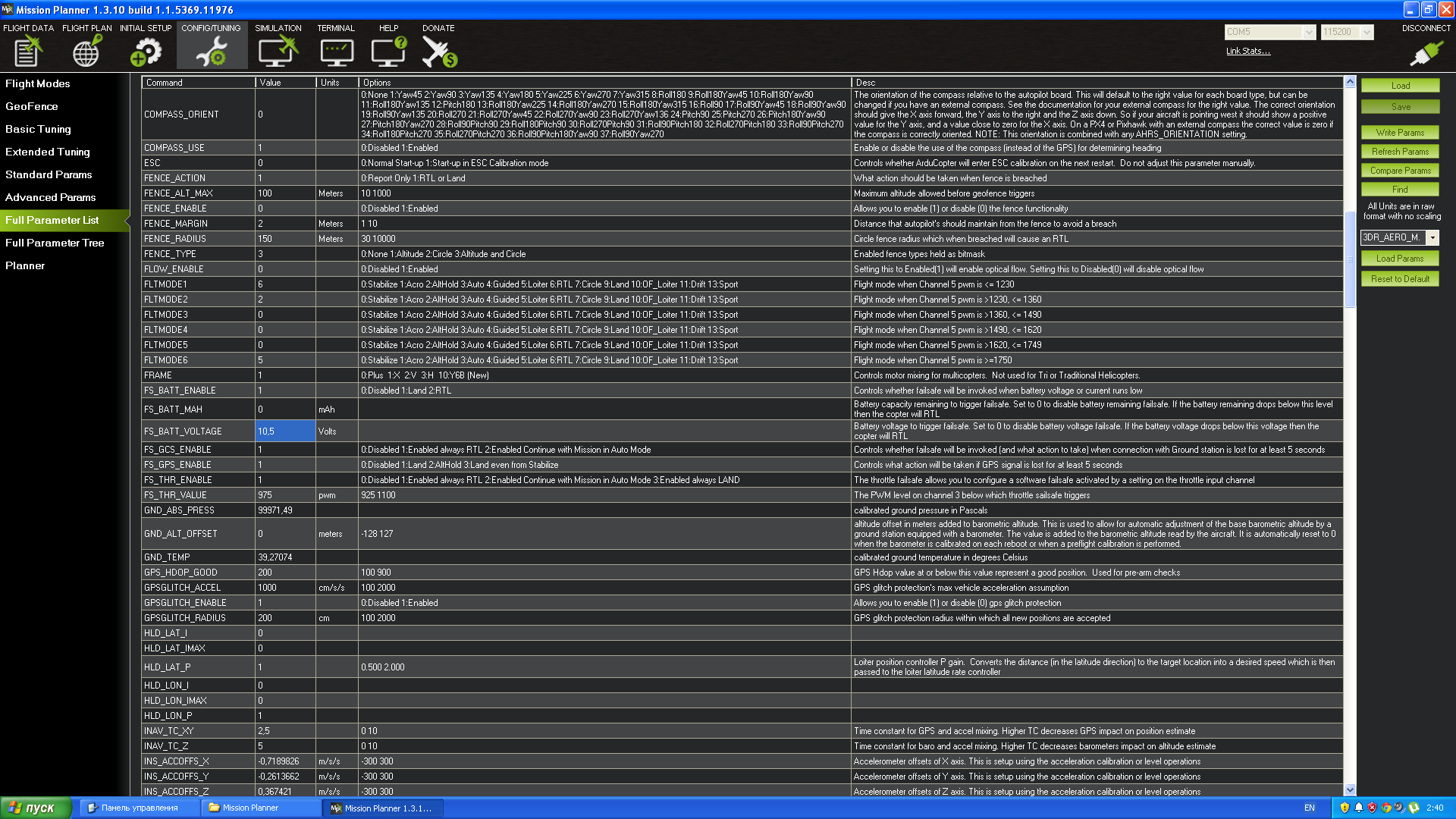
Имея на руках квадрокоптер с OpenSource «мозгами» и ПО тяжело устоять перед искушением что-то улучшить или модифицировать. Для подключения CX-20 к компьютеру понадобится кабель Mini USB и программа для работы с контроллером. Софт можно скачать по этой ссылке, а кабель придется искать самому, т.к. в комплекте поставки его нет. Вообще на плате контроллера установлен расово верный Micro USB, но на корпус устройства выведен именно Mini USB.Главную страницу программы Mission Planner я уже демонстрировал — она представляет из себя карту, на которой можно посмотреть передвижение мультикоптера или задать точки для автономного полета. Слева — импровизированная приборная панель и окошко с большим количеством информационных вкладок, перечисление которых требует отдельного материала. Сильно интересующихся или владельцев схожих устройств уже с этой точки можно отправлять к официальному мануалу на ArduPilot Mega (русский и английский). Чтобы подключится к MP нужно включить аппаратуру, снять пропеллеры с моторов и подключить аккумулятор (можно и без оного, но тогда квадрокоптер будет “разрываться” по поводу севшей АКБ). В левом верхнем углу выбираем порт, к которому подсоединен квадрокоптер, скорость обмена данными устанавливаем 57600 бод и «коннектимся».
Не пытайтесь сразу обновлять программное обеспечение или что-то менять. В первую очередь рекомендуется сделать резервную копию всех настроек контроллера. Для этого нужно пройти по следующему пути CONFIG/TUNING -> Full Parameter List -> OK -> Save (кнопка в правой колонке). И сохраняете куда нибудь в облако, для надежности. После чего вам открывается полный перечень параметров значение которых можно изменять.
Главное не забыть нажать Write Params после проведенных манипуляций. Сказать честно, далеко я в тему настроек контроллера не углублялся и полет по точкам еще не организовывал, но в интернете уже полно инструкций по работе с нашим квадрокоптером в MP, планировании полета по точкам и его реализации. Там же несколько примеров тюнинга квадрокоптера. К слову о тюнинге, помимо того, что в самой программе можно переназначить включение режимов на разные положения тумблеров, народные умельцы скрестили пульт с Arduino и небольшой клавиатурой для упрощения выбора полетного режима.
Преимущества и недостатки
— Привлекательная цена— Полетный контроллер с открытым исходным кодом и возможностью настройки большинства параметров
— Полный набор сенсоров для уверенной стабилизации квадрокоптера в воздухе
— Тугой коннектор питания
— Хрупкое шасси
— Не всегда срабатывает разблокировка двигателей
— Отсутсвие failsafe-режима по питанию
— Вероятность брака компонентов выше чем у DJI (особенно по части АКБ)
Полезные ссылки
CXHobby CX-20 на Multicopter Wiki.Обсуждение CX-20 и Quanum Nova на форуме RCdesign
Обсуждение на RCgroups (англ.)
Квадрокоптер на официальном сайте
Альтернативная инструкция по запуску CX-20 на русском языке
База знаний ArduPilot Mega
Краткий FAQ по первому вылету CX-20
Где купить
Прочитав (Если таки решились обзавестись этим или подобным устройством, то сразу берите несколько запасных аккумуляторов, побольше пропеллеров и защиту оных. Последняя понадобиться каким бы пряморуким вы не были: при неудачном взлете/посадке, испытаниях в домашних условиях или городских полетах, которых лучше и вовсе избегать.
Все вопросы можно задать в комментариях или же отправлять в ВКонтакте. Twitter и Facebook тоже есть, но быструю реакцию в этих соц. сетях не обещаю. Традиционного фото домашних животных тоже не будет, а хотелось бы… =/
Самые обсуждаемые обзоры
| +46 |
4205
124
|
| +114 |
4068
131
|
| +27 |
1787
38
|
| +31 |
2084
38
|
Особенно понравились чёрные стяжки на белом корпусе! ;)
Спасибо за отзыв. :)
ps
Ну чтож делать такие у них правила, это их ресурс
и далее:
Так, всё-таки, стик газа слева или справа?
Автор, исправь, пожалуйста.
Обзор классный.
А квадр… Как то не очень вяжутся полеты по точкам и время полета с камерой 8 минут)
Ну и производитель негодяй, даже на мухе CX10, которой ввиду «никакого» веса и малой высоты полета падения не особенно страшны, реализована защита при умирающем аккуме, и вполне себе работающая.
З.Ы. А было бы неплохо при просмотре профиля видеть, сколько юзер поставил минусов. Думается мне, найдется немало персонажей с 10 комментами и 100500 «коварных» минусов.
Стало быть, «Братишки, я вам покушать принес».
Хоть бы один что отписал.
Сабж же стоит на несколько порядков дороже, и краш с повреждениями неизбежен.
подождем моделей на керосине.
Тихо, тихо, народ, это я так, к слову! :)
Конечно лучше подходящий акк, но просто если под руками нет ничего более — я бы сколхозил.
Простые расчеты по поводу токов:
10А вполне отдаст любой вменяемый 18650, пусть даже это нештатная нагрузка (перегрузка) для него будет. Высокотоковые вполне отдают 30А.
3S2P = от 20А до 60А. Этого не хватит для квадрика?
Ух, прикинул, да у него тое около 5А потребляемый. Так что 18650 проигрывают только по энергоёмкости (Вт*ч/кг)
+ избыточный вес будет быстрее «убивать» моторы, т.к. будут работать на 100%, а обычно их рассчитывают на 60-80% ;)
Но лучшее решение — купить phantom FC40.
Сам думал брать китайские клоны его, но в итоге купил фантика за 420$ здесь же. Его плюсы
1 Он дороже на 100$ но в комплекте идет WIFI камера, и на пульте уже есть готовый канал и рычажок под наклон камеры. Уже это сопоставляет цену
2 Построен на naza 2 — золотой классике контролера. Аля типа мерседес
3 Стабилен до такой степени — что иногда даже скучно. Ничего делать не надо )
4 За счет такого уровня, продают его почти везде и запчастей не надо ждать-все можно купить в пределах 10 км от себя.
5 Хотя и покупать запчасти надо только его вы его угрохаете))
6 Ну и продать фантом в разы легче, чем его клон.
Отличный вариант для новичка.Я его взял чтоб освоить управление рс моделей — так как на вертолете ошибся с креном или направлением-бабах — ремонт. А тут тупанул- отпустил стики и он встал как вкопанный )
Сравнивая назу с мерседесом это конечно круто ))) полностью поддерживаю. Плюс
Супер крепкая алюминиевая рама будет весить много, а простая сразу гнётся. Купи такую раму и килограмма три лучей с винтами к ней )) Гораздо лучше ) Тем более стоит не дорого
Я давно жду такого плана обзоры, так как сам присматриваю «взрослый» квадрокоптер для себя, и для того, чтобы таскать камеру. Надоело баловство с микроквадриками, коих у меня уже 5 штук (и идёт ещё 2, лол). И делаю для себя очередной раз вывод — такое я никогда не куплю. Как бы не пытались китайцы копировать DJI, у них этого никогда не выйдет. Юзал некоторое время Назу лайт, и попытки сравнить её с чем то другим вызывают у меня смех. Хотя и цена этого квадрика — как цена назы с GPS ))) Хотя тини предоставил 50 % скидки — пожалуй это нормальная цена.
Для себя буду собирать квадрокоптер сам. Рама 450 думаю, хотя рамы Н-формы тоже неплохи. Контроллер буду покупать только назу, тут даже без вариантов. Вопрос к знающим, какую покупать аппу? Футабу не потяну, дорого.
Можно конечно подождать пару — тройку лет, пока цены упадут и купить за 4 тысячи, но к тому времени выйдут гораздо более навороченные дроны.
Хочется квадрокоптера за 4 тыс? Сима с камерой — это потолок.
У самого в пользовании целая армия микро квадов. Очень доволен каждым из них. Скоро добавлю несколько обзоров на летающие новинки =)
или ещё дешевле (поменьше размером) Yi Zhan за $29 — у него дизайн необычный, ребятишкам такой может понравиться =)
за себя скажу, что всегда брал WLToys. Сначала комнатный вертолётик, потом сразу пересел на квадр V262 — для улицы шикарен за свои деньги.
Сам пока «хотящий теоретик». Выбираю первый квадрик.
Разрываюсь между хотелкой и жабой.
В идеале квадр с fpv, неплохой управляемостью и неплохим качеством видео.
Выбор стоит между
Parrot ar.drone 2.0
Dji phantome fc 40
Также жду выхода, чтобы узнать цену Паррот бибоп. Судя по описанию, будет конфетой. www.parrot.com/products/bebop-drone/
Walkera x350 pro flv (с камерой ilook, подвесом и экраном на пульте)
Первая модель отвратная по качеству видео
Вторая — самая сбалансированная по потребностям и цене, видео неплохое… Но к пульту крепить отдельно телефон для управления
Третья — самая функциональная, но и самая дорогая. Хотя пугают отзывы о глючности валькиры.
Не исключаю и покупки квадрика без видео. Тоже читал отзывы о v303. Причем на dji форуме… Человек был в восторге от нее. Там отличный контроллер, невероятная управляенмость и устойчивость.
Запутался я что-то сильно.
Может посоветуете?
Психологический бюджет 30-32 тысячи. Желательно меньше )))
Омрачает картину курс доллара. Сейчас квадрики дешевле покупать у нас в онлайн магазинах… Но запасы не безграничные и подозреваю, что скоро цены подскочат.
— небольшое время полёта (10 минут без проблем, дольше — лучше не рисковать, может начать садится в самый не нужный момент и место);
— среднее качество камеры FC40.
Честно говоря, я решил продать коптер, и если получиться, то замахнутся на нечто лучшее:
— Phantom 2 Vision+;
— Phantom 2 + Zenmuse H3-3D + GoPro (или iLook + Бюджетный подвес).
Фантастический качественный по полёту пепелац.
Минусы — специфический внешний вид,(приучили нас к дизайну фантика), дешёвый вид аппаратуры управления, минимум управления — 2 стика, один тумблер (только включения возврата домой), второй тумлер только для настройки. Все дополнительные приблуды и комплектующие только ZeroTech.
кто такие — ZeroTech? Два года назад все ведущие программисты компании Naza ушли и организовали свою.
На сегодняшний день ZeroTech выпускает аппаратуру которая считается лучшей в мире профессионального коптероводства.
такой подает?
Такой вопрос, может подскажешь: при использовании камеры с вайфай (тобишь FPV ) на управление квадром идут просто нереальные наводки, стОит только отлететь на более чем 7-10 метров. Летать становится невозможно, квадр неадекватно реагирует на команды с пульта ДУ. Как решить сию проблему и имеет ли место она быть у всех или только у меня?
www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=55108
P.S. правда без аккумулятора.
Там в названиях
( G ) — зелёные светодиоды
( R ) — красные светодиоды
в зависимости от того, который у вас вышел из строя.