Легендарный квадрокоптер - Cheerson CX-20

- Цена: $2196.31
- Перейти в магазин
Здравствуйте, в этот раз рассмотрим легендарного квадрокоптера Cheerson CX-20
который отлично себя зарекомендовал своими полетными режимами, и относительно небольшой ценой.
Квадрокоптер собран на контроллере — ArduPilot Mega 2.5.2
БК моторы — 2212 980kV.
GPS модуль — BN-880
Имеем вот такую болбшую коробку с ручкой пластиковой ручкой, естественно данная коробка была запакована в почтовую коробку.
Комплектация:
-квадрокоптер;
-пропеллеры — 4шт.; (запасных нет)
-пульт управления квадрокоптером;
-ножки квадрокоптера — 2шт.;
-кронштейн для крепления камеры;
-зарядное устройство;
-аккумулятор 2700mA 3s 25c;
-инструкция по сборке и настройке квадрокоптера;
-ключ для съема пропеллеров;
универсальная отвертка с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
Характеристики квадрокоптера:
-размер 300х300х220мм.
-полетный вес — 850грамм (без камеры);
-время полета на родном аккумуляторе около 13-15мин.;
-дальность радиосвязи пульта с квадрокоптером — 450м.
Полетные режимы квадрокоптера

Открываем коробку и видим еще коробочки с комплектующим.
Все таки производитель не сэкономил на бумаге.
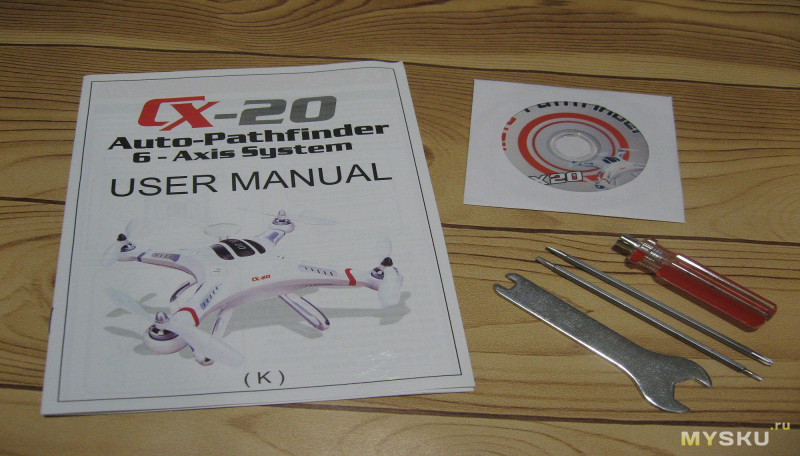
В пакете получаем книжечку User manual, ключ для съема пропеллера и универсальную отвертку с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
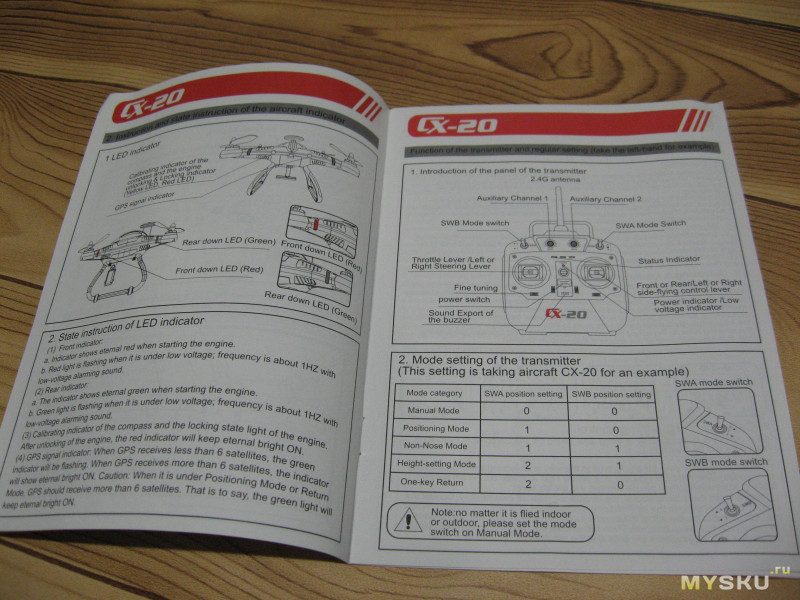
В инструкции можно увидеть, сборку квадрокоптера, калибровку компаса (мы это позже рассмотрим), назначение стиков и кнопок управления, функционал квадрокоптера.

В комплекте получаем зарядное устройство которым обычно комплектуют разные RC игрушки, то есть, зарядка простая с дешевых.
Li-Po аккумулятор mA2700 3S 25C имеющий знаменитый и ходовой штекер ХТ-60 что меня уже радует.

Пульт управления достаточно удобный своим размером.

На пульте имеются тумблерки переключения полетных режимов квадрокоптера к тому же возле тумблерком имеются написаные подскаски переключения режима.

Управления полетными режимами происходит от переключения именно етих тумблеров в такие положения:
0-0 ручной режим;
0-1 удержание позиции GPS;
0-2 возврат квадрокоптера в точку взлета;
1-1 хеад-лес режим;
1-2 удержание высоты.

На панели размещены две ручки которые можно задействовать для управления стабилизированным подвесом, которым можно купить отдельно.

Ну и собственно всеми знакомые триммера полета модели.

Пульт управления питается четырьма батарейками типа АА 1.5V.
Замечу что пульт изготовлен вполне качественно и с удобствами для управления моделью.

В комплекте получаем комплект пропеллеров на восьми дюймовых, вот только запасного комплекта нет, так что летаем аккуратно или же на перед заказываем еще комплект, я вот имею комплект пропеллеров от квадрокоптера Phantom 2 конечно они на дюйм больше но подходят по резьбе на вал мотора.
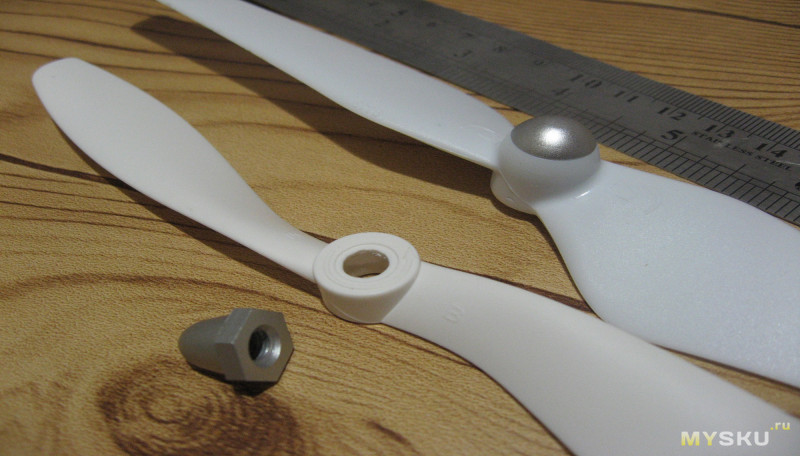
Пропеллер фиксируется на моторе гайкой, замечу что моторы с правым и левым вращением, в итоге получаем и гайки 2шт с правой резьбой М6 и 2шт с левой резьбой М6

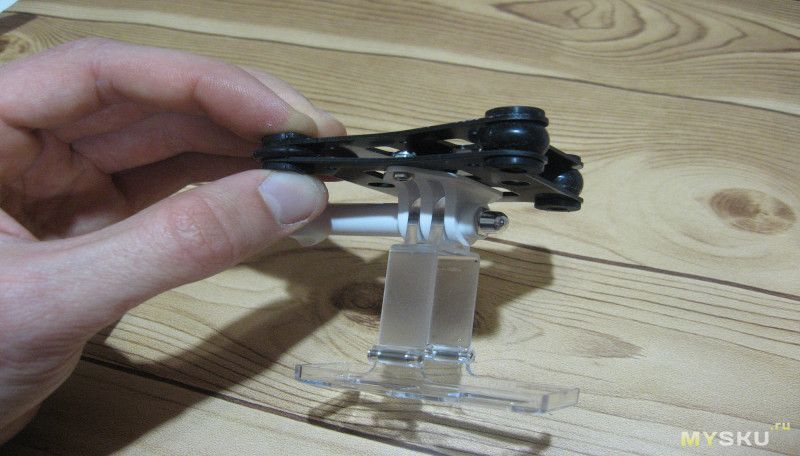
В комплекте получаем кронштейн с виброразвязкой для крепежа камеры.

Конечно производитель заточил кронштейн, а вернее посадочное место под камеру Gopro или же ее аналоги, в моем случае камера FIREFLY 6S.
Размер под камеру

Шасси квадрокоптера достаточно прочные крепятся болтиками с пластиковой барашкой для удобства и быстроты съема при транспортировке.

Собственно сам квадрокоптер в несобранном виде только из коробки.

Для правильной установки пропеллеров, нанесены стрелки вращения на лучах квадрокоптера и на пропеллерах.
После установки винтов нужно обязательно «протянуть» гайки ключом идущим в комплекте, иначе можете лишится одного из пропеллеров прямо в полете.

А вот цифровой компас (HMC5883L) вынесен на отдельную площадку, так называемую корпусную «антенну» дабы избежать наводок от силовых цепей.

Под лучами квадрокоптера расположена светодиодная подсветка которую в работе мы увидим после полной сборки модели.
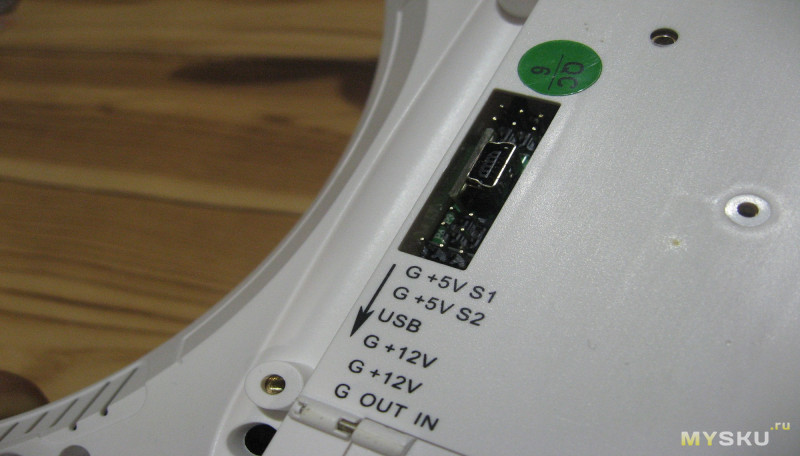
На брюхе квадрокоптера выведен с полетного контроллера Mini USB. разъем для подключения к ПК в программе Mission Planner представляет из себя карту, на которой можно посмотреть передвижение мультикоптера или задать точки для автономного полета. Слева — импровизированная приборная панель и окошко с большим количеством информационных вкладок, перечисление которых требует отдельного материала. Сильно интересующихся или владельцев схожих устройств уже с этой точки можно отправлять к официальному мануалу на ArduPilot Mega (русский и английский).
Но замечу что с коробки квадрокоптер отлично настроен, так что кто не любит ковырять настройки квадрокоптера, программу можете и не скачиват.
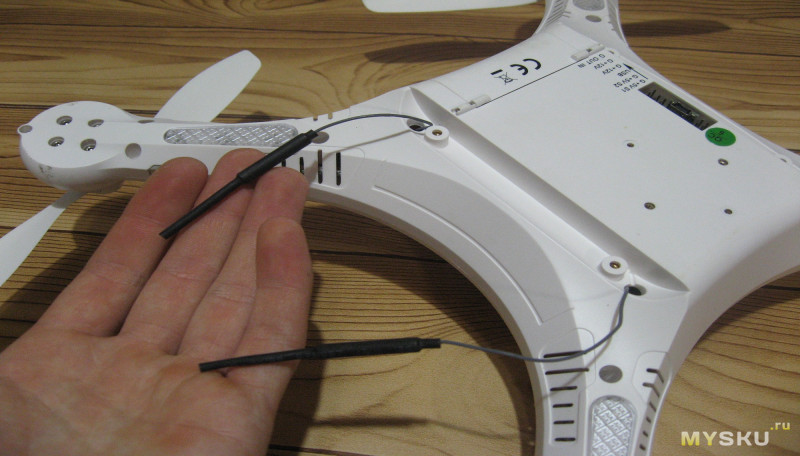
Две антенны идущих с приемника.
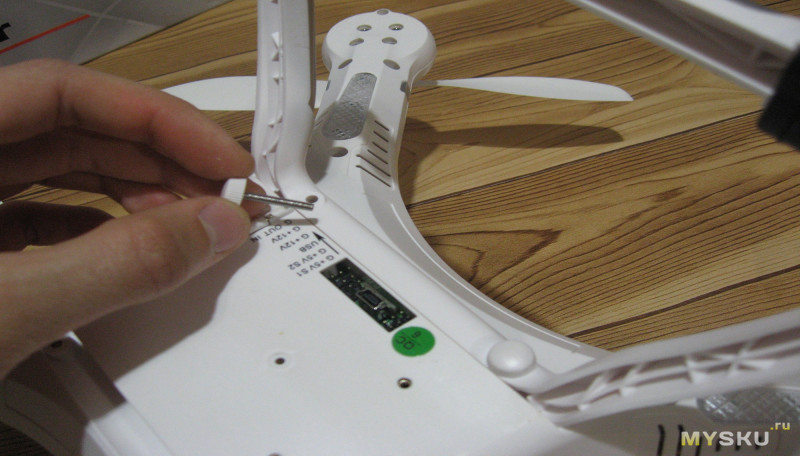
Устанавливаем шасси которое крепится посредством двух винтов.

С антенной связи будьте осторожны и постарайтесь не передавить провод идущий к приемнику.
Антенны необходимо зафиксировать пластиковой стяжкой или узким скотчем к шасси квадрокоптера.

Общий вид квадрокоптера сверху. На большой печатной плате, которая играет роль распределителя питания установлены: ArduPilot Mega 2.5.2 (белая коробочка в центре, мозги квадрокоптера) и связка из приемника радиоуправления и GPS-моудля с антенной (слева).

Замечу что корпус собран довольно качественно и при том имеет влитые резьбы под болтики, а не саморезы вогнанные в пластмассу.
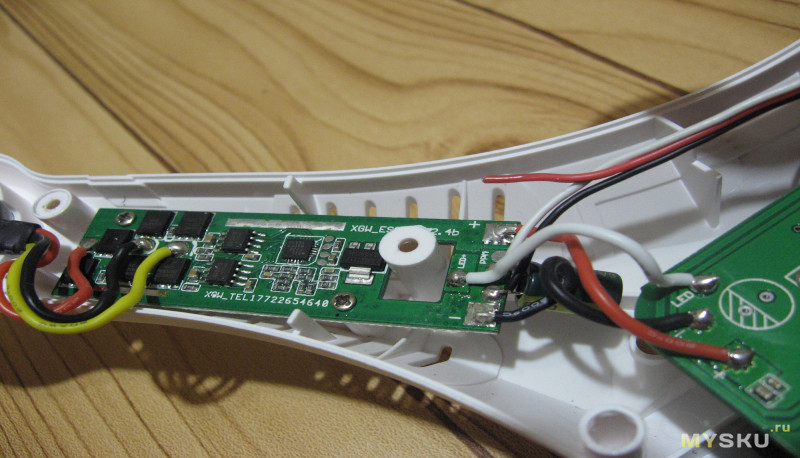
Регуляторы оборотов собраны на полевых транзисторах TPCA8057-H
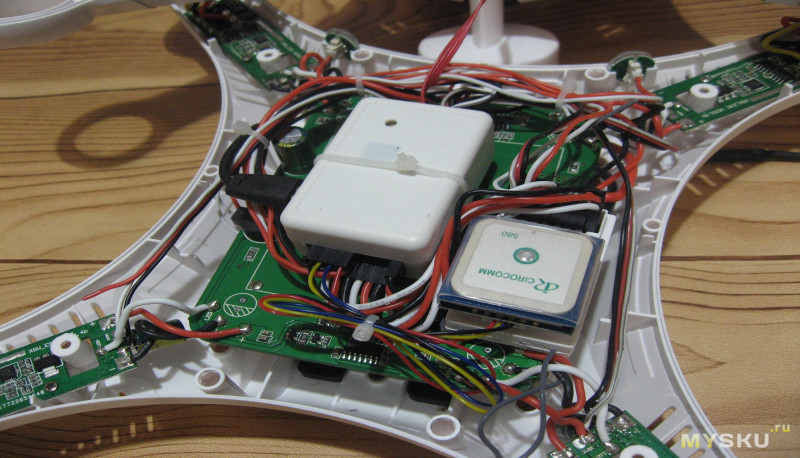

GPS модуль BN-880 — отдельно на его сделал обзор mysku.club/blog/china-stores/42838.html

Микроконтроллер STM8S003F3. Именно он управляет зуммером (пищалкой) и габаритными светодиодами. Теперь понятно почему у CX-20 не работает Failsafe-режим при низком уровне заряда аккумулятора. Силовая часть и полетный контроллер максимально развязаны, а мониторингом напряжения на аккумуляторе и вовсе занимается отдельный микроконтроллер, который никак не связан с «мозгами»
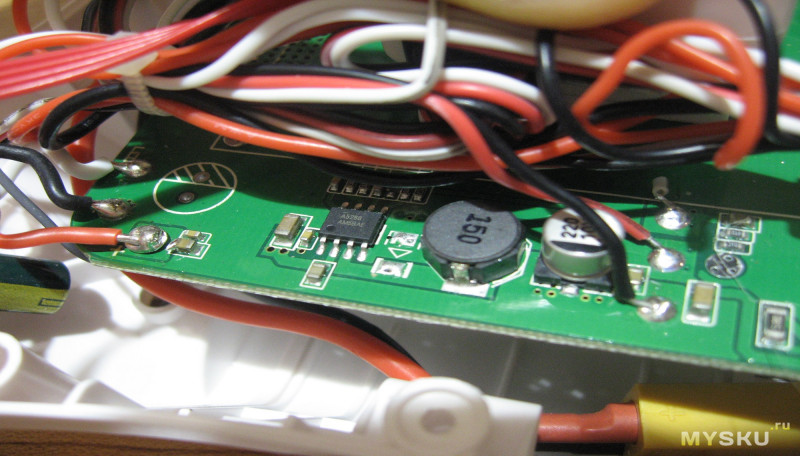
В распредплату интегрирован понижающий преобразователь (MP1593) для питания всей бортовой электроники.
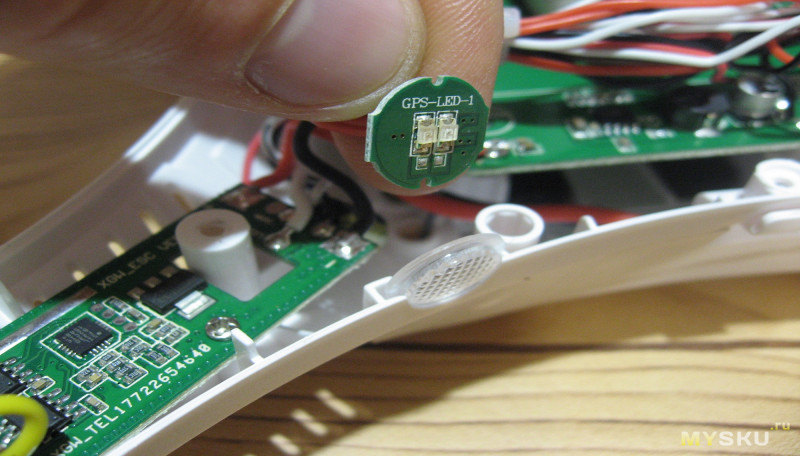
SMD светодиоды, оповещающие о режиме входа в калибровку и готовности к полету.
Рекомендую использовать сигнализатор разряда аккумулятора, конечно внутри квадрокоптера имеется свой сигнализатор имеющий только один бузер, но не всегда вы его можете не услышать, но увидеть как квадрокоптер остановил моторы и рванул камнем вниз.


Полетные индикаторы квадрокоптера:
— мерцание желтого и зеленого — вход в режим калибровки;
— мерцание зеленого цвета говорит о поиске GPS сигнала;
— свечение зеленого цвета говорит о найденных GPS сигналах.


Преимущества и недостатки
— Привлекательная цена
— Полетный контроллер с открытым исходным кодом и возможностью настройки большинства параметров
— Полный набор сенсоров для уверенной стабилизации квадрокоптера в воздухе
-Тугой коннектор питания
-Отсутсвие failsafe-режима по питанию
— Вероятность брака компонентов выше чем у DJI (особенно по части АКБ)
Полезные ссылки
CX-20 на Multicopter Wiki.
Обсуждение CX-20
Квадрокоптер на официальном сайте
Альтернативная инструкция по запуску CX-20 на русском языке
База знаний ArduPilot Mega
Краткий FAQ по первому вылету CX-20

Видео распаковки и сборки квадрокоптера.
Видео с демонстрацией полетных режимов + тест дальности РУ.
Камеру использую FiIREFLY S6 (камера в комплект квадрокоптера не входит)
В публикации с использованием текста. Просто сослаться на использование материалов автора блога nnmlab.com
На этом все, есть вопросы спрашивайте.
который отлично себя зарекомендовал своими полетными режимами, и относительно небольшой ценой.
Квадрокоптер собран на контроллере — ArduPilot Mega 2.5.2
БК моторы — 2212 980kV.
GPS модуль — BN-880
Имеем вот такую болбшую коробку с ручкой пластиковой ручкой, естественно данная коробка была запакована в почтовую коробку.
Комплектация:
-квадрокоптер;
-пропеллеры — 4шт.; (запасных нет)
-пульт управления квадрокоптером;
-ножки квадрокоптера — 2шт.;
-кронштейн для крепления камеры;
-зарядное устройство;
-аккумулятор 2700mA 3s 25c;
-инструкция по сборке и настройке квадрокоптера;
-ключ для съема пропеллеров;
универсальная отвертка с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
Характеристики квадрокоптера:
-размер 300х300х220мм.
-полетный вес — 850грамм (без камеры);
-время полета на родном аккумуляторе около 13-15мин.;
-дальность радиосвязи пульта с квадрокоптером — 450м.
Полетные режимы квадрокоптера
Удержание позиции (GPS Mode)
В работу включается GPS-модуль. Почти такой же как у вас в телефоне, только с большой керамической антенной. В GPS Mode квадрокоптер старается удерживать позицию. Режим ужасно скучный, так как на движение стиков аппарат реагирует с запозданием, а углы крена и тангажа ограничены 15-20 градусами из-за чего значительно снижается скорость полета.
Удержание направления (Orientation Mode)
Новички часто сталкиваются с проблемой зеркального управления квадрокоптером, когда тот направлен носом в сторону пилота. Отчасти эта проблема решается установкой FPV-системы или включением режима удержания направления (в реальности же лучше освоить зеркальное управление — пригодится в экстренных ситуациях). В каком положении вы включите этот режим там и будет у квадрокоптера нос и если вы даете команду лететь вперёд по горизонтали, то он улетит от вас даже если повернут носом к вам. Главное при выключении Orientation Mode оказаться позади квадрокоптера иначе управление инвертируется.
Удержание высоты (Altitude Hold Mode)
Взлетаем в ручном режиме до высоты на которой хотим продолжить полет и включаем Altitude Hold Mode. Когда ручка газа в центре — аппарат держит высоту самостоятельно, при этом за пилотом остается возможность контролировать набор высоты или снижение. Аппарат достаточно резвый и летать в целом приятно. Именно в этом режиме у меня лучше всего получается крутить горизонтальную восьмерку. :)
Возврат «домой» (Return Home Mode)
Если аппарат улетел слишком далеко, а вы летаете без FPV или просто лень вручную возвращать аппарат домой предусмотрен Return Home Mode. Квадрокоптер сам поднимется (или опустится) на высоту 20 метров и вернется в точку старта ожидая дальнейших действий со стороны пилота. Для отмены RTH необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». ВАЖНО еще в процессе подготовки к полету дождаться постоянного свечения зеленого светодиода (сигнализирует о подключении к спутникам GPS), иначе квадрокоптер реально может в сторону Китая улететь.
Открываем коробку и видим еще коробочки с комплектующим.
Все таки производитель не сэкономил на бумаге.
В пакете получаем книжечку User manual, ключ для съема пропеллера и универсальную отвертку с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
В инструкции можно увидеть, сборку квадрокоптера, калибровку компаса (мы это позже рассмотрим), назначение стиков и кнопок управления, функционал квадрокоптера.
В комплекте получаем зарядное устройство которым обычно комплектуют разные RC игрушки, то есть, зарядка простая с дешевых.
Li-Po аккумулятор mA2700 3S 25C имеющий знаменитый и ходовой штекер ХТ-60 что меня уже радует.
Пульт управления достаточно удобный своим размером.
На пульте имеются тумблерки переключения полетных режимов квадрокоптера к тому же возле тумблерком имеются написаные подскаски переключения режима.
Управления полетными режимами происходит от переключения именно етих тумблеров в такие положения:
0-0 ручной режим;
0-1 удержание позиции GPS;
0-2 возврат квадрокоптера в точку взлета;
1-1 хеад-лес режим;
1-2 удержание высоты.
На панели размещены две ручки которые можно задействовать для управления стабилизированным подвесом, которым можно купить отдельно.
Ну и собственно всеми знакомые триммера полета модели.
Пульт управления питается четырьма батарейками типа АА 1.5V.
Замечу что пульт изготовлен вполне качественно и с удобствами для управления моделью.
В комплекте получаем комплект пропеллеров на восьми дюймовых, вот только запасного комплекта нет, так что летаем аккуратно или же на перед заказываем еще комплект, я вот имею комплект пропеллеров от квадрокоптера Phantom 2 конечно они на дюйм больше но подходят по резьбе на вал мотора.
Пропеллер фиксируется на моторе гайкой, замечу что моторы с правым и левым вращением, в итоге получаем и гайки 2шт с правой резьбой М6 и 2шт с левой резьбой М6
В комплекте получаем кронштейн с виброразвязкой для крепежа камеры.
Конечно производитель заточил кронштейн, а вернее посадочное место под камеру Gopro или же ее аналоги, в моем случае камера FIREFLY 6S.
Размер под камеру
Шасси квадрокоптера достаточно прочные крепятся болтиками с пластиковой барашкой для удобства и быстроты съема при транспортировке.
Собственно сам квадрокоптер в несобранном виде только из коробки.
Для правильной установки пропеллеров, нанесены стрелки вращения на лучах квадрокоптера и на пропеллерах.
После установки винтов нужно обязательно «протянуть» гайки ключом идущим в комплекте, иначе можете лишится одного из пропеллеров прямо в полете.
А вот цифровой компас (HMC5883L) вынесен на отдельную площадку, так называемую корпусную «антенну» дабы избежать наводок от силовых цепей.
Под лучами квадрокоптера расположена светодиодная подсветка которую в работе мы увидим после полной сборки модели.
На брюхе квадрокоптера выведен с полетного контроллера Mini USB. разъем для подключения к ПК в программе Mission Planner представляет из себя карту, на которой можно посмотреть передвижение мультикоптера или задать точки для автономного полета. Слева — импровизированная приборная панель и окошко с большим количеством информационных вкладок, перечисление которых требует отдельного материала. Сильно интересующихся или владельцев схожих устройств уже с этой точки можно отправлять к официальному мануалу на ArduPilot Mega (русский и английский).
Но замечу что с коробки квадрокоптер отлично настроен, так что кто не любит ковырять настройки квадрокоптера, программу можете и не скачиват.
Две антенны идущих с приемника.
Устанавливаем шасси которое крепится посредством двух винтов.
С антенной связи будьте осторожны и постарайтесь не передавить провод идущий к приемнику.
Антенны необходимо зафиксировать пластиковой стяжкой или узким скотчем к шасси квадрокоптера.
Общий вид квадрокоптера сверху. На большой печатной плате, которая играет роль распределителя питания установлены: ArduPilot Mega 2.5.2 (белая коробочка в центре, мозги квадрокоптера) и связка из приемника радиоуправления и GPS-моудля с антенной (слева).
Замечу что корпус собран довольно качественно и при том имеет влитые резьбы под болтики, а не саморезы вогнанные в пластмассу.
Регуляторы оборотов собраны на полевых транзисторах TPCA8057-H
GPS модуль BN-880 — отдельно на его сделал обзор mysku.club/blog/china-stores/42838.html
Микроконтроллер STM8S003F3. Именно он управляет зуммером (пищалкой) и габаритными светодиодами. Теперь понятно почему у CX-20 не работает Failsafe-режим при низком уровне заряда аккумулятора. Силовая часть и полетный контроллер максимально развязаны, а мониторингом напряжения на аккумуляторе и вовсе занимается отдельный микроконтроллер, который никак не связан с «мозгами»
В распредплату интегрирован понижающий преобразователь (MP1593) для питания всей бортовой электроники.
SMD светодиоды, оповещающие о режиме входа в калибровку и готовности к полету.
Рекомендую использовать сигнализатор разряда аккумулятора, конечно внутри квадрокоптера имеется свой сигнализатор имеющий только один бузер, но не всегда вы его можете не услышать, но увидеть как квадрокоптер остановил моторы и рванул камнем вниз.
Калибруем компас перед каждым полетом
1. Вставляем аккумулятор и соединяем разъемы.
2. Включаем аппаратуру управления и переводим правый стик в нижнее-правое положение. На все про все есть 5 секунд, по истечению которых режим калибровки перестанет быть доступным и придется вернутся к первому пункту.
3. Дождитесь пока левый индикатор начнет попеременно мигать красным и желтым цветом. Постоянное свечение правого светодиода ожидать не обязательно.
4. Собственно сама калибровка. Возьмите квадрокоптер «носом от себя» и повернитесь вокруг своей оси 3-5 раз, затем опустите нос коптера и совершите еще 3-5 оборотов*. Направление вращения роли не играет.
5. Опускаем квадрокоптер на землю и отключаем питание(!). Не обращайте внимание на продолжающий мигать красно-желтый светодиод — просто отключите питание и все настройки сохранятся автоматически.
*Этот вид калибровки более свойственный DJI Phantom с его полетным контроллером Naza. APM же принято калибровать следующим образом. И да, при калибровке старайтесь минимизировать влияние магнитных помех (электросети, автомобили и любые другие устройства генерирующие магнитные поля).
2. Включаем аппаратуру управления и переводим правый стик в нижнее-правое положение. На все про все есть 5 секунд, по истечению которых режим калибровки перестанет быть доступным и придется вернутся к первому пункту.
3. Дождитесь пока левый индикатор начнет попеременно мигать красным и желтым цветом. Постоянное свечение правого светодиода ожидать не обязательно.
4. Собственно сама калибровка. Возьмите квадрокоптер «носом от себя» и повернитесь вокруг своей оси 3-5 раз, затем опустите нос коптера и совершите еще 3-5 оборотов*. Направление вращения роли не играет.
5. Опускаем квадрокоптер на землю и отключаем питание(!). Не обращайте внимание на продолжающий мигать красно-желтый светодиод — просто отключите питание и все настройки сохранятся автоматически.
*Этот вид калибровки более свойственный DJI Phantom с его полетным контроллером Naza. APM же принято калибровать следующим образом. И да, при калибровке старайтесь минимизировать влияние магнитных помех (электросети, автомобили и любые другие устройства генерирующие магнитные поля).
Полетные индикаторы квадрокоптера:
— мерцание желтого и зеленого — вход в режим калибровки;
— мерцание зеленого цвета говорит о поиске GPS сигнала;
— свечение зеленого цвета говорит о найденных GPS сигналах.
Преимущества и недостатки
— Привлекательная цена
— Полетный контроллер с открытым исходным кодом и возможностью настройки большинства параметров
— Полный набор сенсоров для уверенной стабилизации квадрокоптера в воздухе
-Тугой коннектор питания
-Отсутсвие failsafe-режима по питанию
— Вероятность брака компонентов выше чем у DJI (особенно по части АКБ)
Полезные ссылки
CX-20 на Multicopter Wiki.
Обсуждение CX-20
Квадрокоптер на официальном сайте
Альтернативная инструкция по запуску CX-20 на русском языке
База знаний ArduPilot Mega
Краткий FAQ по первому вылету CX-20
Видео распаковки и сборки квадрокоптера.
Видео с демонстрацией полетных режимов + тест дальности РУ.
Камеру использую FiIREFLY S6 (камера в комплект квадрокоптера не входит)
В публикации с использованием текста. Просто сослаться на использование материалов автора блога nnmlab.com
На этом все, есть вопросы спрашивайте.
Самые обсуждаемые обзоры
| +74 |
3122
118
|
| +47 |
3057
49
|
| +132 |
4418
57
|
Уже прилетел с Китая HAKRC Storm32 Конечно подвес с дешевых, ну для начала пойдет, тем более он на три оси + на БК моторах.
По функионалу все меня устраивает, летает не плохо, но в сильный ветер не рекомендую летать, так как, при полном нажатии вперед в квадрокоптера малые наклоны, конечно это можно исправить в программе, но я туда лезать не хочу.
Вешать на него телеметрию, камеру, подвес, нет никакого смысла, выйдет очень дорого.(дешевле сразу купить P3S, что в итоги и стабильнее и на голову выше по качеству)
Если хочется полетать, попробовать каково оно и руки откуда надо, то можно купить F450, выйдет очень дешево и ни чуть не хуже CX20, вот на него уже можно докупать всякие штуки: FPV и прочее.
Далее если вам это нравится, всё равно приходим к Фантику… Так что проще(если есть деньги) сразу взять его и кайфовать, что я и сделал.
Стабильность и прочее на уровне, т.е. я ни разу не летая на квадрике, сразу же полетел без проблем, плюс дальность! Многие думают что им дальность не нужна, но допустим начало квадрик сносить ветром, а вы уже на краю зоны приема(200-300м) и всё прощай квадрик, а у фантика 3-4 км дальность, как минимум больше шансов, посадить на землю или хотя бы видеть куда упал дрон)
Если купить такой квадрик без камеры и к нему как здесь action камеру. Я так понимаю, что камерой нельзя управлять в полёте будет, только включение видеозаписи на земле и полетели, нельзя будет как-то фотки делать во время полёта?
Хотя вот эта именно камера что у меня, она управляется с телефона через Wi-Fi даже можно наблюдать видео с камеры на телефоне.
Хочется как обычно, всё и сразу и с максимальными удобствами.
Пока думал о Tovsto aegean без камеры к нему по Fpv подключать action камеру git2.
Пока полетать на нем научиться, потом приобрести к нему fpv флем и подвес нормальный, остаётся вопрос как делать фото.
Вроде как Tovsto поддерживает управление с камеры. Будет ли можно снимать фото с ним, не понятно.Нравится внешне квадрик.
Или смотрю ещё такой вариант Hubsan 501s pro, тут и fpv есть сразу, и очень понравился режим следуй за мной, но камера тут конечно, и внешний вид не нравится, и скорее игрушка больше. Так и не понял, action камеру он сможет поднять?
В общем, если честно, подзапутался что же мне купить такого. Может что посоветуете или мысли какие выскажите кто в теме)
Буджет 300, максимум 350.
В планах собрать ЧПУ фрезерный станок, сделали первый шаг, заказали на али контроллер, а в своем городе алюминеевый профиль.
Типа «Легендарные ношенные китайские трусы всего за 20$!!!111» — так и хочется купить
При срабатывании защиты ЛЭП, вдоль неё пускается бригада, чтобы установить возможную причину отключения.
Есть у нас участок в 8 километров — сплошное болото. Месить грязь никому не охота. Вот и приспособились.
Конечно, повреждённый изолятор не всегда удаётся разглядеть, но упавшее дерево видно всегда.
Выбор прост: Либо люди 4 часа ползут по болоту, не всегда с результатом. Либо планируется ремонт на основе фотографии.
И почему-то кажется, будто писала бабушка лет 85 из деревни, и этот старушечий голос озвучивал мне весь текст)))
Ну а так отличный вариант для тех, кто любит ковыряться в настройках, коих очень много. Из коробки аппарат ведет себя как корова, так что в настройки лезть можно и нужно с повышением опыта контроля — новичкам рекомендовано летать в режиме «коровы».
Модель умеет летать далеко, так что нужно докупать фпв комплект хотя бы простенький, дабы не потерять его из виду переведя взгляд в сторону, телеметрию либо трекер так же маст хэв
в вашем случае это доказывает компас в башне. У BN-880 компас обьединён с gps в одну сборку.
У других моделей есть кнопка «связать», а у CX-20 нет…