Хороший квадрокоптер для начинающих HolyStone HS240

- Цена: $34.00
- Перейти в магазин
Всем привет! Этим постом я открываю цикл статей о квадрокоптерах. Разберем модели начального, среднего и верхнего ценового диапазона, посмотрим как самому собрать и настроить фристайловый FPV квадрокоптер. Сразу скажу, благодаря китайскому техническому прогрессу сегодня это стало совершенно просто.
Сегодня рассмотрим квадрокоптер для начинающих, который позволит без значительных вложений понять принцип управления и полета и увидеть как все выглядит с высоты птичьего полета. Модель называется HolyStone HS240. Погнали!
Первый вопрос, который появляется у многих: можно ли научиться летать на дешевом квадрокоптере и потом спокойно полететь на том же DJI?
Да, можно, потому что 90% квадрокоптеров летают в режиме STABLE, в котором при поступлении команды дрон отклоняется пропорционально отклонению стика на пульте до максимально разрешенного угла, а при отпускании стиков возвращается и удерживает горизонтальное положение на основе показаний встроенных датчиков (гироскопа, барометра и GPS). Поэтому принцип управления квадрокоптерами из разных ценовых сегментов будет одинаковым. Это похоже на управление автомобилем — классы отличаются размерами и комфортом, принцип же управления остается неизменным.
Оставшиеся 10% это фристайловые и гоночные квадрокоптеры летающие в режиме ACRO. Этот режим координально отличается от STABLE и позволяет совершать фигуры высшего пилотажа. В следующих статьях я расскажу о таких квадрокоптерах.

Второй распространенный вопрос: на коробке за 3000 руб написано Видео 1080p, смогу ли я снимать шедевры для видео блога?
Не секрет, что большинство квадрокоптеров покупается с целью фото-видео съемки. И именно камеры составляют основную стоимость модели. Чудес не бывает, модели начального уровня транслируют на телефон картинку уровня web камеры, где и происходит сохранение записи, в то время как квадрокоптеры среднего и верхнего ценового диапазона позволяют сохранять качественное видео с высоким битрейтом на sd карту на борту. Как следствие, модели начального уровня нужны именно для того, чтобы вы на собственном опыте попробовали взлететь и увидеть природу с высоты птичьего полета и дальше сами решили бы нужно ли это именно вам или нет.


Теперь давайте посмотрим, что производители предлагают нам в квадрокоптерах начального уровня. Что ждать от птички, стоит ли с них начинать или сразу переходить в средний сегмент.
Для примера я взял квадрокоптер китайской фирмы HolyStone модель HS240.

Посмотрим на основные характеристики:
— корпус модели выполнен складным, вес квадрокоптера 158г, моторы коллекторные. Благодаря такому весу вы не должны его регистрировать как БПЛА и запрашивать разрешение на полеты.
— управление осуществляется по каналу 2,4Ггц, полет выполняется на удаление 100м и высоту до 100м, что опять же соответствует разрешенной высоте полетов в законе (до 150м)
— GPS отсутствует, за контроль высоты при посадке отвечает оптический датчик, расположенный с нижней стороны корпуса. В целом при такой дальности полетов платить за GPS, по-моему, нерационально.
— камера идет на выбор — 720P (фото/ видео в разрешении 1280X720) и 4К (фото 4096x3072, видео 2048х1080, что на самом деле 2К, ну да ладно). Видео передается по WiFi с расстояния 60м через приложение HFUN, доступное для IPhone и Android
— полетное время заявлено 13 минут, что в дальнейшем и подтвердилось.
В целом по характеристикам никакой критики не видно, модель легкая, компактная, коллекторных моторов в данном случае бояться не надо, качество картинки заявлено достойное, отсутствие GPS с заявленной дальностью 100м не критично от слова вообще.
Стоимость квадрокоптера в комплектации с камерой 4К и одним аккумулятором 4407 руб. Промокод K1ZPQ8G2DEOC даст скидку около 400 руб.

Заказ был сделан 30.09.20 и доставлен со склада в России за 5 дней. Так как Почта России к перевозке не имела никакого отношения, то и упаковка закономерно сохранилась в идеальном состоянии.

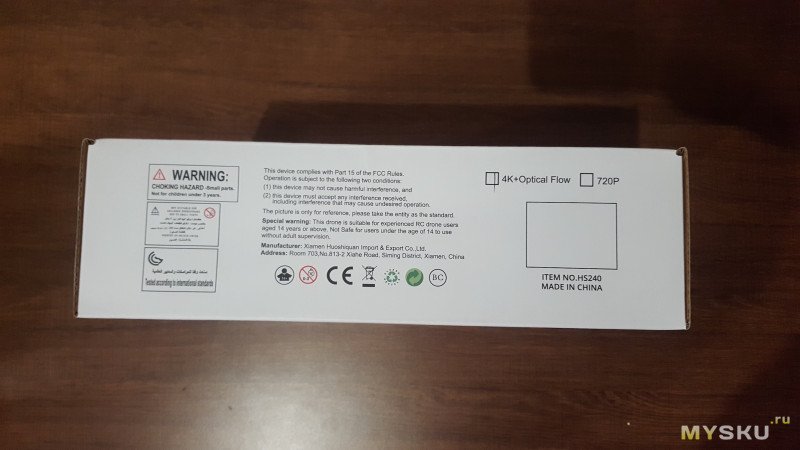
На коробке изображен сам квадрокоптер, его характеристики и версия, обещающая 4К видео

В коробке лежит пульт управления, модель, инструмент, запасные части и защита винтов.


Обратите внимание, винты промаркированы буквами A и B. Это связано с тем, что при полете пара винтов квадрокоптера вращается по часовой стрелке, а вторая пара против. Буквенные обозначения помогут новичку при замене правильно выбрать винт.

Пульт выполнен в стиле DJI и в целом достаточно удобен. Мне понравилось крепление, позволяющее надежно зафиксировать телефон.


На пульте расположены следующие кнопки:
— два стика, непосредственно отвечающие за управление квадрокоптером
— кнопка взлет/посадка, обеспечивающая снижение квадрокоптера и мягкую посадку по данным сенсора расстояния
— кнопка выбора одной из трех скоростей полета (2 м/с 2,5 м/с 3 м/с).
— кнопка выполнения FLIP (петли Нестерова)
— уникальная кнопка, о которой я мечтал, летая на авиамоделях, реверс каналов. Суть в том, что когда квадрокоптер летит в вашу сторону, то отклонение, примеру, стика по каналу наклона влево приведет к отклонению модели вправо, после чего пилот не разобравшись с причиной такого поведения модели, может отклонить стик еще больше влево, что гарантировано приведет к аварийной ситуации. Это типичная и, я бы сказал, основная ошибка начинающего пилота- визуальщика. Эта кнопка проблему решает.
— ну и самая важная кнопка NULL. Она делает НИГЕЧО и работает идеально!
Пульт питается от трех батареек типоразмера АА и вещает в эфир на частоте 2,4Ггц через встроенную антенну. Пластиковые «антенны» на корпусе выполняют исключительно декоративную функцию.

При создании корпуска квадрокоптера дизайнеры черпали вдохновение все у той же DJI. Корпус очень легкий, а складывающиеся лучи делает его достаточно компактным.


Под моторам расположены 4 светодиода: 2 белый спереди и 2 красных сзади. Это позволяет определять положение модели в полете. При низком заряде аккумулятора горят только красные огни.

В носовой части расположены еще 2 белый светодиода. Благодаря им удобно определять летит ли модель в пилоту или от него.

Снизу расположен сенсор высоты и выведен диполь антенны управления. Достаточно спорное решение, т.к антена может легко порваться.

Сзади расположен отсек для аккумулятора.Литий ионный аккумулятор емкостью 1000 мАч вставлен в фирменный формфактор и нещадно в нем болтается. В моем случае аккумулятор не фиксируется в корпусе квадрокоптера на защелку, но держится довольно крепко. Случаев потери в полете не было.


Заряжается аккумулятор от microUSB кабеля. Индикация зарядки неочевидная: красный светодиод горит когда аккумулятор либо не подключен, либо полностью заряжен. В процессе зарядки светодиоды не горят.

Полеты
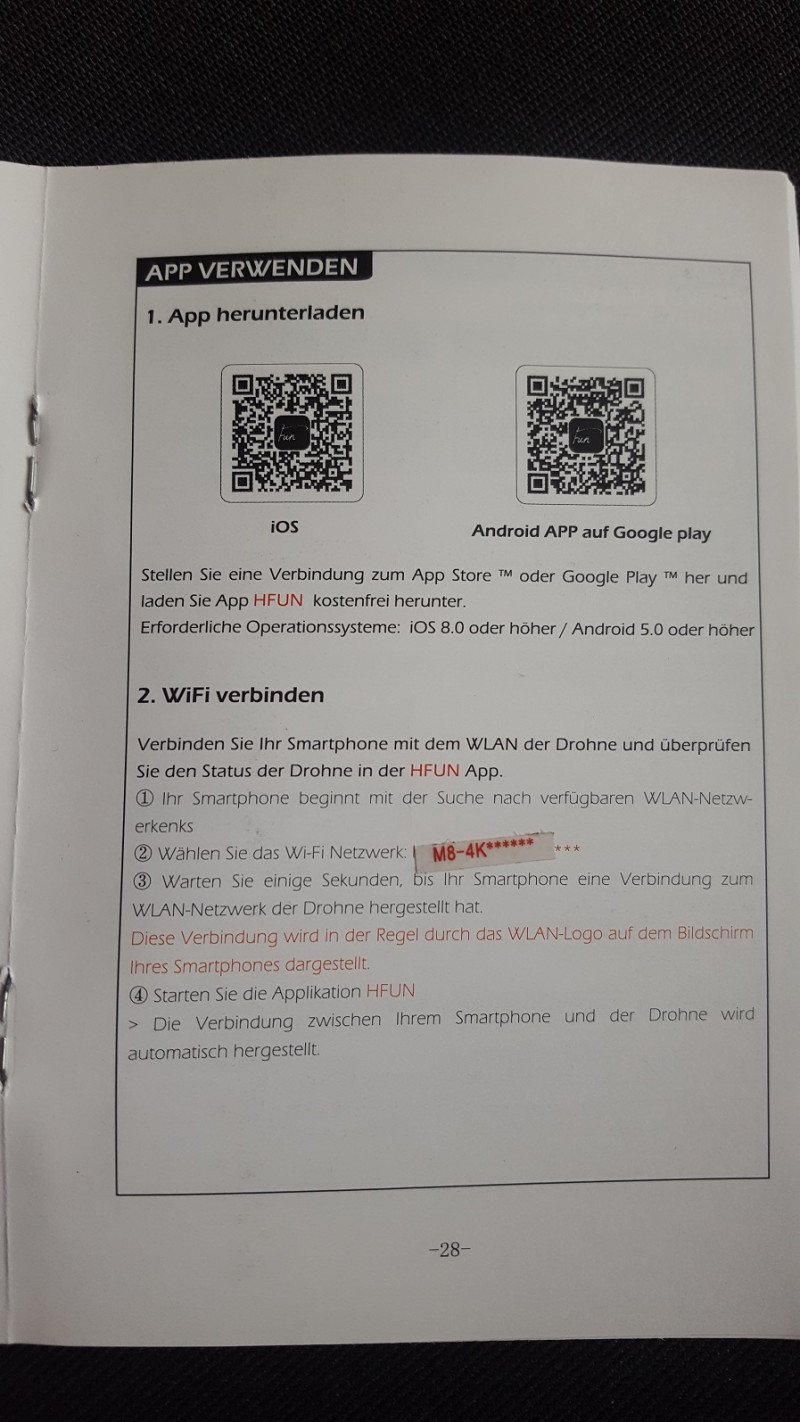
Перед полетом необходимо скачать на телефон приложение HFun (удобно с помощью QR кода из инструкции), включить квадрокоптер и подключиться с телефона к WiFi сети M8-4K*****. Интересно, что в инструкции правильная маска сети указана только в разделе на немецком языке и то с помощью вклейки.
На экран приложения начнет транслировать картинка с борта. Управлять можно как с экрана телефона, так и с пульта управления. После нажатия кнопки «Взлет» коптер набирает высоту около полуметра и довольно уверено висит на месте.

В первом скоростном режиме модель очень вяло отзывается на действия стиков, во втором уже вполне может летать. Разницы между вторым и третьим режимом я не увидел. Кажется, что третьего режима нет вообще.
Для проверки дальности полета я специально не стал выезжать в чистое поле и просто запустил квадрокоптер у дома, как это будет делать большинство владельцев. реальная дальность полета составила метров 40. Как только квадрокоптер терял сигнал он сразу выполнял посадку.
Выполнять flip коптер наотрез отказался. Пульт пищал, предупреждая о нажатой кнопке, но ничего более не происходило.
В плане полетов можно сказать следующее: квадрокоптер предназначен для полетов рядом с собой, он достаточно уверено управляется даже в условиях несильного ветра и вполне позволяет отработать навыки полета в режиме стабилизации.
Видео и фото
В процессе полетов картинка с борта передавалась с заметными рывками. Летать по FPV используя только картинку не получится.
Запись производилась на IPhone7, Свойства полученного файла:
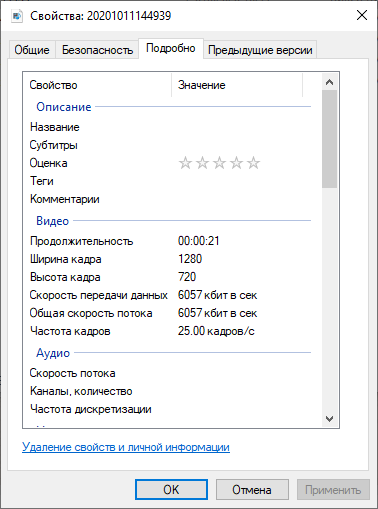
В целом, несмотря на заверения производителя, качество полученного видео оставляет желать лучшего. Оно неплохо смотрится на телефоне, но не более. К чести HS240 хочу отметить, что с квадрокоптера Hubsan H501M за вдвое большую цену качество полученной картинки плюс минус такое же.
На видео я специально не редактировал картинку с борта и вы можете оценить ее сами.
Давайте подведем итоги. С помощью HS240 отлично подойдет для того, чтобы понять интересно ли вам вообще летать на квадрокоптерах, что это вообще такое и как мир выглядит с высоты несколько десятков метров. Он не запишет для вас видео шедевр, вы не улетите на нем на несколько километров. Но благодаря таки относительно недорогим моделям вы, так же как в свое время и я, можете открыть для себя новый мир — мир FPV, в котором царит свобода полета.
Мой же HolyStone HS240 отправится племяннику — пусть учится.
Сегодня рассмотрим квадрокоптер для начинающих, который позволит без значительных вложений понять принцип управления и полета и увидеть как все выглядит с высоты птичьего полета. Модель называется HolyStone HS240. Погнали!
Первый вопрос, который появляется у многих: можно ли научиться летать на дешевом квадрокоптере и потом спокойно полететь на том же DJI?
Да, можно, потому что 90% квадрокоптеров летают в режиме STABLE, в котором при поступлении команды дрон отклоняется пропорционально отклонению стика на пульте до максимально разрешенного угла, а при отпускании стиков возвращается и удерживает горизонтальное положение на основе показаний встроенных датчиков (гироскопа, барометра и GPS). Поэтому принцип управления квадрокоптерами из разных ценовых сегментов будет одинаковым. Это похоже на управление автомобилем — классы отличаются размерами и комфортом, принцип же управления остается неизменным.
Оставшиеся 10% это фристайловые и гоночные квадрокоптеры летающие в режиме ACRO. Этот режим координально отличается от STABLE и позволяет совершать фигуры высшего пилотажа. В следующих статьях я расскажу о таких квадрокоптерах.
Второй распространенный вопрос: на коробке за 3000 руб написано Видео 1080p, смогу ли я снимать шедевры для видео блога?
Не секрет, что большинство квадрокоптеров покупается с целью фото-видео съемки. И именно камеры составляют основную стоимость модели. Чудес не бывает, модели начального уровня транслируют на телефон картинку уровня web камеры, где и происходит сохранение записи, в то время как квадрокоптеры среднего и верхнего ценового диапазона позволяют сохранять качественное видео с высоким битрейтом на sd карту на борту. Как следствие, модели начального уровня нужны именно для того, чтобы вы на собственном опыте попробовали взлететь и увидеть природу с высоты птичьего полета и дальше сами решили бы нужно ли это именно вам или нет.
Теперь давайте посмотрим, что производители предлагают нам в квадрокоптерах начального уровня. Что ждать от птички, стоит ли с них начинать или сразу переходить в средний сегмент.
Для примера я взял квадрокоптер китайской фирмы HolyStone модель HS240.
Посмотрим на основные характеристики:
— корпус модели выполнен складным, вес квадрокоптера 158г, моторы коллекторные. Благодаря такому весу вы не должны его регистрировать как БПЛА и запрашивать разрешение на полеты.
— управление осуществляется по каналу 2,4Ггц, полет выполняется на удаление 100м и высоту до 100м, что опять же соответствует разрешенной высоте полетов в законе (до 150м)
— GPS отсутствует, за контроль высоты при посадке отвечает оптический датчик, расположенный с нижней стороны корпуса. В целом при такой дальности полетов платить за GPS, по-моему, нерационально.
— камера идет на выбор — 720P (фото/ видео в разрешении 1280X720) и 4К (фото 4096x3072, видео 2048х1080, что на самом деле 2К, ну да ладно). Видео передается по WiFi с расстояния 60м через приложение HFUN, доступное для IPhone и Android
— полетное время заявлено 13 минут, что в дальнейшем и подтвердилось.
В целом по характеристикам никакой критики не видно, модель легкая, компактная, коллекторных моторов в данном случае бояться не надо, качество картинки заявлено достойное, отсутствие GPS с заявленной дальностью 100м не критично от слова вообще.
Стоимость квадрокоптера в комплектации с камерой 4К и одним аккумулятором 4407 руб. Промокод K1ZPQ8G2DEOC даст скидку около 400 руб.
Заказ был сделан 30.09.20 и доставлен со склада в России за 5 дней. Так как Почта России к перевозке не имела никакого отношения, то и упаковка закономерно сохранилась в идеальном состоянии.
На коробке изображен сам квадрокоптер, его характеристики и версия, обещающая 4К видео
В коробке лежит пульт управления, модель, инструмент, запасные части и защита винтов.
Обратите внимание, винты промаркированы буквами A и B. Это связано с тем, что при полете пара винтов квадрокоптера вращается по часовой стрелке, а вторая пара против. Буквенные обозначения помогут новичку при замене правильно выбрать винт.
Пульт выполнен в стиле DJI и в целом достаточно удобен. Мне понравилось крепление, позволяющее надежно зафиксировать телефон.
На пульте расположены следующие кнопки:
— два стика, непосредственно отвечающие за управление квадрокоптером
— кнопка взлет/посадка, обеспечивающая снижение квадрокоптера и мягкую посадку по данным сенсора расстояния
— кнопка выбора одной из трех скоростей полета (2 м/с 2,5 м/с 3 м/с).
— кнопка выполнения FLIP (петли Нестерова)
— уникальная кнопка, о которой я мечтал, летая на авиамоделях, реверс каналов. Суть в том, что когда квадрокоптер летит в вашу сторону, то отклонение, примеру, стика по каналу наклона влево приведет к отклонению модели вправо, после чего пилот не разобравшись с причиной такого поведения модели, может отклонить стик еще больше влево, что гарантировано приведет к аварийной ситуации. Это типичная и, я бы сказал, основная ошибка начинающего пилота- визуальщика. Эта кнопка проблему решает.
— ну и самая важная кнопка NULL. Она делает НИГЕЧО и работает идеально!
Пульт питается от трех батареек типоразмера АА и вещает в эфир на частоте 2,4Ггц через встроенную антенну. Пластиковые «антенны» на корпусе выполняют исключительно декоративную функцию.
При создании корпуска квадрокоптера дизайнеры черпали вдохновение все у той же DJI. Корпус очень легкий, а складывающиеся лучи делает его достаточно компактным.
Под моторам расположены 4 светодиода: 2 белый спереди и 2 красных сзади. Это позволяет определять положение модели в полете. При низком заряде аккумулятора горят только красные огни.
В носовой части расположены еще 2 белый светодиода. Благодаря им удобно определять летит ли модель в пилоту или от него.
Снизу расположен сенсор высоты и выведен диполь антенны управления. Достаточно спорное решение, т.к антена может легко порваться.
Сзади расположен отсек для аккумулятора.Литий ионный аккумулятор емкостью 1000 мАч вставлен в фирменный формфактор и нещадно в нем болтается. В моем случае аккумулятор не фиксируется в корпусе квадрокоптера на защелку, но держится довольно крепко. Случаев потери в полете не было.
Заряжается аккумулятор от microUSB кабеля. Индикация зарядки неочевидная: красный светодиод горит когда аккумулятор либо не подключен, либо полностью заряжен. В процессе зарядки светодиоды не горят.
Полеты
Перед полетом необходимо скачать на телефон приложение HFun (удобно с помощью QR кода из инструкции), включить квадрокоптер и подключиться с телефона к WiFi сети M8-4K*****. Интересно, что в инструкции правильная маска сети указана только в разделе на немецком языке и то с помощью вклейки.
На экран приложения начнет транслировать картинка с борта. Управлять можно как с экрана телефона, так и с пульта управления. После нажатия кнопки «Взлет» коптер набирает высоту около полуметра и довольно уверено висит на месте.
В первом скоростном режиме модель очень вяло отзывается на действия стиков, во втором уже вполне может летать. Разницы между вторым и третьим режимом я не увидел. Кажется, что третьего режима нет вообще.
Для проверки дальности полета я специально не стал выезжать в чистое поле и просто запустил квадрокоптер у дома, как это будет делать большинство владельцев. реальная дальность полета составила метров 40. Как только квадрокоптер терял сигнал он сразу выполнял посадку.
Выполнять flip коптер наотрез отказался. Пульт пищал, предупреждая о нажатой кнопке, но ничего более не происходило.
В плане полетов можно сказать следующее: квадрокоптер предназначен для полетов рядом с собой, он достаточно уверено управляется даже в условиях несильного ветра и вполне позволяет отработать навыки полета в режиме стабилизации.
Видео и фото
В процессе полетов картинка с борта передавалась с заметными рывками. Летать по FPV используя только картинку не получится.
Запись производилась на IPhone7, Свойства полученного файла:
В целом, несмотря на заверения производителя, качество полученного видео оставляет желать лучшего. Оно неплохо смотрится на телефоне, но не более. К чести HS240 хочу отметить, что с квадрокоптера Hubsan H501M за вдвое большую цену качество полученной картинки плюс минус такое же.
На видео я специально не редактировал картинку с борта и вы можете оценить ее сами.
Давайте подведем итоги. С помощью HS240 отлично подойдет для того, чтобы понять интересно ли вам вообще летать на квадрокоптерах, что это вообще такое и как мир выглядит с высоты несколько десятков метров. Он не запишет для вас видео шедевр, вы не улетите на нем на несколько километров. Но благодаря таки относительно недорогим моделям вы, так же как в свое время и я, можете открыть для себя новый мир — мир FPV, в котором царит свобода полета.
Мой же HolyStone HS240 отправится племяннику — пусть учится.
| +117 |
25257
66
|
Самые обсуждаемые обзоры
| +133 |
3870
143
|
| +28 |
2114
53
|
| +70 |
4256
44
|
Вот тут я не понял. какая запись? он что видео транслирует на телефон и телефон снимает что передает камера коптера?
PS. я просто не в курсе но думал коптер своими силами снимает.
По Вашему описанию я бы проверил аккумулятор и его зарядку
Вобщем стоит ли он 11000 рублей большой вопрос. Я бы начал с совсем дешевого научился летать и потом, перешагнув ступеньку, взял бы что-то немного посерьезнее, к примеру Xiaomi FIMI X8SE за 35000.
Но я сразу взял Mavic 2 PRO :)
П.С.: как то раз я тоже чуть не протерял дрон из-за того, что не включил динамическую точку возврата. Миник летел в режиме следования за машиной, однако в конце концов не поспел, потерял связь и решил вернуться в домашнюю точку. От которой я уже отъехал на 4 км по дороге с односторонним движением (то есть чтобы вернуться к дрону, мне нужно было дать кругаля километров в 15 минимум). В последний момент каким-то чудом вернул управление. Но навык управления китайской игрушкой без GPS мне ровно никак бы не помог.
В целом я говорю о том, что дроны начального уровня дают понять что это такое без серьезных денежных вливаний. Первый дрон я купил просто сыну поиграться, но меня зацепило. Другой же скажет — это не для меня и его денежные потери будут небольшими.
я купил (давно) walkera qr x350 исходя из «да че там, у меня ж высшее техническое образование» и умею спаять канал воспроизведения катушечного магнитофона с нуля.
в первые несколько запусков я понял, что это летающая болгарка, которая лопастями запросто выковыривает камешки из асфальта и способна мелко нашинковать мои ноги при запуске дома,
расколол поляризующий фильтр для третьей гоупро, смяв его оправу об асфальт (этому предшествовало «джойстик газа от себя» и «ой а куда это улетают мои восемьсот баксов без учета гоупро» и джойстик газа на ноль, после чего эта дура камнем рухнула с высоты этажей семи, наверное)
и напугал детей, когда к ним через ограждение площадки в скейтпарке (где был один из пробных стартов) с громким треском и не сломав лопасти вломилась эта валькирия.
на несколько лет она заняла почетное место на шкафу, сейчас кажется уже вздулся аккум (и слава богу).
«чтобы я еще хоть раз… за баранку этого пылесоса...» )))
Я в свое время позарился на Walkera Scout X4
— Это совсем другое!
И даже с DJI всегда надо помнить:
1. всё что взлетело — может упасть! и это вопрос времени, ситуации и стечения обстоятельств. И вы в ответе за него и последствия!
2. всегда понимать куда и как будет повернут нос и хвост модели, при отклонении стиков, что сзади, сбоку, внизу, вверху.
3. Представлять примерно какая сила ветра внизу и сила ветра наверху, на разных высотах, над лесополосой, за и над зданием, если далеко лететь то куда дует ветер и с какой примерно силой и хватит ли аккумулятора для возврата домой!!!
4. если есть настройки по автоматическому возврату, то всегда понимать что и куда жать и настраивать чтоб квадр вернулся к хозяину.
5. ну и если квадр ненароком потерпел краш, то уметь что то клеить, паять, разбирать и думать.
6. и вообще думать полезно)))
или дети во дворе, управляющими радиомашинками у нас теперь автоконструкрукторы или автогонщики?
Вы, видимо, не застали время/место, когда авиамоделисты реально моделировали, конструировали, собирали летающие «игрушки».
А думать всегда полезно, неважно чем занимаешься…
Но невеждам всепропальщикам нет нет да и надо поныть про душителей свободы в кровавом Мордере. Это, кстати, полностью справедливо и для регистрации БПЛА.
Нет никаких перегибов относительно законодательства «цивилизованных» стран.
Другое дело, что масштабы страны позволяют нам относиться к этому с усмешкой…
Кнопка NULL доставила.
Впрочем, по уточненной информации, сейчас они немного осадили коней, сроки растягиваются:
с 1 января 2021 года — до €50 в месяц;
с 1 января 2022 года — до €20 в месяц.
Мои очки Fatshark HDO и приемник RapidFire, общей стоимостью около 50К, DHL через таможню не смогли перевезти пришлось ждать возврата. Вторую посылку Почта России спокойно доставила, потому что всем пофиг :)
Теперь вот думаю по частям собрать свой квадр.
ИЛИ
https://www.banggood.com/MJX-B3-Bugs-3-Brushless-Independent-ESC-3D-Roll-Gopro-3-Gopro-4-RC-Quadcopter-RTF-p-1096795.html
плюсы: БК движки, рама довольно крепкая, не дорогой, есть возможность апгрейда на вкус и цвет))
минусы: нет GPS, нет удержания высоты, не умеет предугадывать ваши желания)))
мои доработки:
+ доп нормальные аккумы на 2S — 2200 — 2400mAh ( от 900руб)
+ FPV камеру (от 800руб)
+ FPV передатчик ( от 700руб)
+ FPV нормальную антенну ( от 400руб)
+ FPV шлем. (от 3 — 4 тыс руб)
+ заменить антенну на пульте на выносную от wifi роутера ( 250 руб максимум)
желательно:
— нормальную зарядку хотяб IMAX B6
— буззер пищалку, либо с вольтажом по отсечке разряда, либо поисковую с собственным аккумом.
\\\ Лично сам с такими доработками улетал на MJX-B3 в поле на 1,5 км. проверенно GPS Garmin навигатором примотанным к нему.
Управление с помощью смартфона вообще не рассматривайте, это настолько тормозное и грубое управление, что им можно полностью убить желание летать. Если покупать, только с пультом управления.
Я бы сказал, что винты устанавливаются не парами, а через один. левое вращение-правое-левое-правое. Достаточно установить один и сразу становиться ясно что и куда ставить. Двигатели (коллекторные) различаются цветом проводов белый-черный или красный-синий.
Пример дешевого гексакоптера
Это верный выброс денег. Коллекторы живут недолго и всё остальное будет из копеечных комплектующих.
Лучший вариант — взять jjrc H31 и поставить на него камеру с передатчиком на 5,6 ГГц за 1000 р. В сети подробно описаны эти переделки. Получается совершенно не убиваемый вариант. Очень шустрый. Я на таком года 2 летал, в чего только не врезался. И хоть бы что.
Единственный недостаток — нет Акро режима.
Чтобы сделать фото, нужно еще как-то долететь до нужного места, прицелится.
Тут нужны бесколлекторные двигатели, чтобы с ветром бороться. Это уже 100 баксов. А значит, потерять жалко. нужен еще ЖПС, чтобы возвращался. Вот вам и Хапсан 501 выходит как минимум.
p.s. целевая аудитория — пацан 6 лет, всякие там курсовые камеры итд не нужны, просто что была «надежная игрушка».
В Вашем случае на убить, посмотрите на бенге какой нибудь из младших Eachine.
Сразу берите
1. пару запасных корпусов — иногда чинятся паяльником, но иногда лучше менять. Для замены — выпаиваются моторы от платы и потроха перекидываются в новый корпус.
2. набор из доп. 5 акб с зарядкой на 5 сразу. Типа такой (первая попавшаяся ссылка)
Можно ещё купить комплект моторов, но их сложнее убить. Хотя мой ребенок смог.
Винты не убивал ни разу, они закрыты корпусом.
ps Мне кажется для 6 лет ещё рано. в 9-10 уже норм. Моему в 7-8 нехватало чувства «микроконтроля». Бил квадрик то в потолок то в пол. А к 10 уже летает сам и я не смотрю за процессом.
Для себя нарастил padы на джойстике, чтобы ход был больше и контролировать было проще по началу.
или еще JJRC H67 там чуть больше движки.
НУ и для продвинутых:
Пропы ( + 30-60 секунд полета ):
https://www.banggood.com/20PCS-KINGKONGs-or-LDARC-31mm-Propellers-Sets-for-Tiny6-Tiny-Whoop-Eachine-E010-E010C-E010S-Blade-Inductrix-p-1141695.html
Аккумы ( около +30-40 с полета, + они долговечнее):
https://www.banggood.com/5Pcs-URUAV-3_8V-300mAh-40-or-80C-1S-HV-4_35V-PH2_0-Lipo-Battery-for-Happymodel-Mobula6-Eachine-TRASHCAN-Snapper6-7-Mobula7-p-1405460.html
или
https://www.banggood.com/5Pcs-URUAV-3_8V-250mAh-40C-or-80C-1S-Lipo-Battery-PH2_0-for-Happymodel-Mobula6-HD-Eachine-US65-UK65-URUAV-UR65-Mobula7-p-1364758.html
Камеру примерно вот такую:
https://www.banggood.com/Eachine-TX04-PAL-Super-Mini-Light-AIO-5_8G-40CH-25MW-VTX-700TVL-120-Wide-Angle-FPV-Camera-p-1166418.html
Первое, что хотелось бы сказать: навыки пилотирования дешёвых квадриков никак не помогут управлять более дорогими, даже хуже — придётся переучиваться на ходу.
Если кто-то захочет Мавик, то надо покупать сразу его и не тратить зря деньги на всякие HolyStone и т.п.
но не «переучиваться», а лишь какое-то время привыкать к поведению новой модели.
— 100500й жалкий закос под Мавик на колекторах с управлением и видео по WiFi и никакой камерой…
Все эти дешовые квадрики — просто деньги на ветер. Качества фото/видео никакое. Удовольствие от полета — 0.
P.S. Были квадрики Фантом 3 Адв, Про, теперь Мавик Про.
Получил неплохие первичные знания по новой для себя тематике, которая интересна,
но освещается столь подробно очень редко, да и «просветители»(как один..) лишь
меряются пиписками, глуша интерес своими бравурными речами о личных «подвигах»,
соря ничего не говорящими терминами\названиями и «сам дурак!»,
но ничуть не опускаясь до помощи «лузерам» в освоении данного вопроса…
Надеюсь, цикл освоения продолжится в таком-же ключе. Авансом-плюс здесь и в карму.
Да, можно, потому что 90% транспортных средств ездят по земле и при поворачивают пропорционально отклонению руля, а при отпускании руля выравнивают траекторию, траляля, и т.д.
чего? оптический датчик контролирует высоту? как?
порубленные щщи. гиф
Не поверите, но это правда.
ссылка
через wifi — его лучше сразу закрыть, что б не пугаться почем зря.
Для чего? Хочу переделать)) Проще выкинуть и взять что-то на БК? Проще, но не хочется. Для «проще» — я уже собрал квадрик, а хочется игрушку переделать на БК двигатели, но не меняя при этом полётник.
про БК квадр для начинающего написал пост выше.
Тогда возможно буду просто на базе этого корпуса собирать квадрик. Из плюсов этого корпуса — он складной)
а будет ли контроллер бесколлекторного работать правильно от импульсного питания — большой вопрос
1. у коллекторников 2 провода потому что это просто (+ и -) и если поменять полярность то мотор будет просто менять направление вращения. и скорость вращения мотора регулируется тупо увеличением или уменьшением силы пропускаемого тока.
2. У безколлекторных моторов! всегда! должен быть РЕГУЛЯТОР оборотов, к нему подходят силовые (+ и -) почти на прямую от аккумулятора и они НЕ могут быть никогда! переполюсованы! иначе сгорит РЕГУЛЯТОР. А так же сигнальный и иногда (-), тоненькие НЕ силовые от полетного контроллера. При вращении двигателя ПОЛЕТНЫЙ КОНТРОЛЛЕР посредством специального сигнала дает команду РЕГУЛЯТОРУ сколько и в какой момент должен вращаться двигатель, так же РЕГУЛЯТОР может АКТИВНО ПРИТОРМАЖИВАТЬ обороты двигателя чтоб он выполнял этим самым те или иные задачи в совокупности всей конструкции ( будь это квадрокоптер или самолет). Ну а на выходе к мотору из РЕГУЛЯТОРА идут 3 силовых провода для возбуждения магнитного поля в обмотке и тем самым задают вращение безколлекторному мотору.
а у вас какая задача то ставится перед квадриком?
хотя немного подумав вы затронули очень интересную тему. пойду построю схему по вашему запросу, что из этого получится…
Если делать так чтоб регуль срабатывал сразу от приемника по PWM сигналу ( так например устроено на радио автомобильчиках) то для машинок это так и делается. А вот что то летающее нужно уже удерживать в воздухе, нужны датчики положения в пространстве и тд и тп. не просто же от подачи тока на проводки моторчиков все летит! всё гораздо сложнее.