Полетный контроллер APM 2.6,обзор и полная видеоинструкция.

- Цена: 137.84
- Перейти в магазин
Распаковка
Всем привет!!! Очень давно не заходил на mysku.club и не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине :(
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру APM 2.6, так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал :)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter ) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер :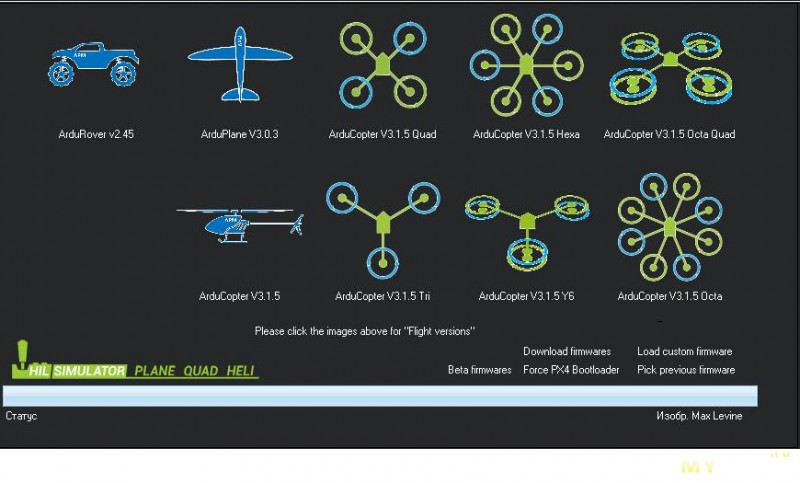 У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект АРМ 2.6 за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму :) (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде, ТЫЦ

Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Ссылка на прошивку PPM:
Ссылка на прогу Flip: www.atmel.com/tools/FLIP.aspx
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Ссылка на прогу U-centr:
Ссылка на Конфигурационный файл с настройкой для APM:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
Более продвинутая настройка PID с помощью режима Autotune mode:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Ну или если нет возможности организовать питание как у меня, купить любой ВЕК на 5волт, хотя он на 100% надежен не будет.А запитывать от любого Power Module который позиционируется как для АРМ, я вообще не рекомендую, только использовать как датчик тока.
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться :)
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов :)
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
Всем привет!!! Очень давно не заходил на mysku.club и не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине :(
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру APM 2.6, так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал :)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter ) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер :
У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект АРМ 2.6 за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму :) (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде, ТЫЦ
Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Ссылка на прошивку PPM:
Ссылка на прогу Flip: www.atmel.com/tools/FLIP.aspx
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Ссылка на прогу U-centr:
Ссылка на Конфигурационный файл с настройкой для APM:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
Более продвинутая настройка PID с помощью режима Autotune mode:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Ну или если нет возможности организовать питание как у меня, купить любой ВЕК на 5волт, хотя он на 100% надежен не будет.А запитывать от любого Power Module который позиционируется как для АРМ, я вообще не рекомендую, только использовать как датчик тока.
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться :)
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов :)
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
| +41 |
24537
51
|
Самые обсуждаемые обзоры
| +137 |
7013
98
|
Коптеры более тяжелые и(или) большего размера соответственно будут более устойчивы к ветру. Например, те которые зеркалки таскают на БК подвесах.
Все таки лучше летать в штиль. Про APM не знаю, у меня пока еще его нет. Но наза на раме 330 висела в точке как прибитая.
PS: Видео Юлиана и сайт apmcopter.ru прекрасно дополняют друг друга!
На APM давно смотрю, времени только нет им заняться плотно.
эта вещь
hobbyking.com/hobbyking/store/__58283__HKPilot_Mega_2_7_Master_Set_With_OSD_LEA_6H_GPS_Power_module_Telemetry_Radio_915Mhz_XT_60_.html
и AMP 2.6
по ходу они абсолютно идентичны и совместимы или есть какие отличия?
Внешний компас думаю более правильно, ибо GPS желательно располагать всегда вверху (к небу) а компас можно уже и внизу на ноге (к земле)?
С уважением Яков.
Я так понимаю контроллер можно ставить на первый этаж рамы?
Стойку с копасом и ГПС сверху.
Думаю, от такой компоновки контроллер будет более защищен при краше.
Спасибо!
Если вы желаете существенно увеличить дальность действия вашей аппаратуры управления, то этот усилитель для вас. Это простое решение для надежного увеличения дальности действия вашего передатчика на гарантированные 10 км. Вот и видео полетов с этим усилителем.
Сайт создан для помощи всем в настройке контроллера APM (ArduPilotMega, ArduCopter или как хотите его называйте). Надеюсь здесь вы найдете ответы на многие вопросы.
Также здесь будут собраны на мой взгляд интересные электронные штучки, заслуживающее внимание интересное видео, мое видео и, другой контент по мере появления новых идей.
Рад видеть всех здесь, а так же жду полезные комментарии!
Теперь и форум!
как думаете такой же как в обзоре, стоит брать?
https://aliexpress.com/item/item/APM2-6-ArduPilot-UAV-Flight-Controller-APM-2-6-6M-GPS-w-Compass-Power-Module-915Mhz/32239717027.html
Спасибо.
Вопрос не будет ли лишней телеметрия с АПМ если есть на АР? скину ссылки на мои заказы а вы посоветуйте что лишнее что оставить и если можно дайте какие нибудь идеи как это максимально использовать за все уже уплаченно. вот ссылки
https://aliexpress.com/item/item/APM2-6-ArduPilot-UAV-Flight-Controller-APM-2-6-6M-GPS-w-Compass-Power-Module-915Mhz/32426176879.html
www.hobbyking.com/hobbyking/store/__75277__Turnigy_TGY_i10_10ch_2_4Ghz_Digital_Proportional_RC_System_with_Telemetry_Mode_1_EU_Warehouse_.html
Заранее спасибо
Фактически эти телеметрии дополняют друг друга.
Телеметрия APM — подключается напрямую в контроллер и позволяет видеть статус контроллера, настраивать его, видеть и менять позицию коптера в воздухе. Там же Вы увидите и вольтаж батареи, если подключите монитор вольтажа батареи к контроллеру. Все это будет транслироваться на ноутбук или планшет, к которому подключен модуль телеметрии (наземный). Для того, чтобы подключить наземный модуль к планшету, Вам необходимо дополнительно купить OTG кабель.
Телеметрия, которая идет с Turnigy — Вам нужно будет подключить все датчики в модуль телеметрии Turnigy на борту и тогда он будет транслировать информацию на пульт. Разумеется, она не работает с контроллером, поэтому будет показывать только температуру воздуха вокруг коптера :) и вольтаж батареи.