Шаговый двигатель Nema 17HS19-2004S1
- Цена: $8.89
- Перейти в магазин
Добрый день!
Некоторое время назад самостоятельно начал собирать 3D принтер HyperCube. Заказал набор самых дешевых шаговых двигателей nemo 17, как позже выяснилось, что экономить не стоило, хотя бы на двигателе, который стоит на подаче экструдера. При печати температура двигателя превышала 60 градусов, собственно из-за чего и пришлось заказать более мощный двигатель.
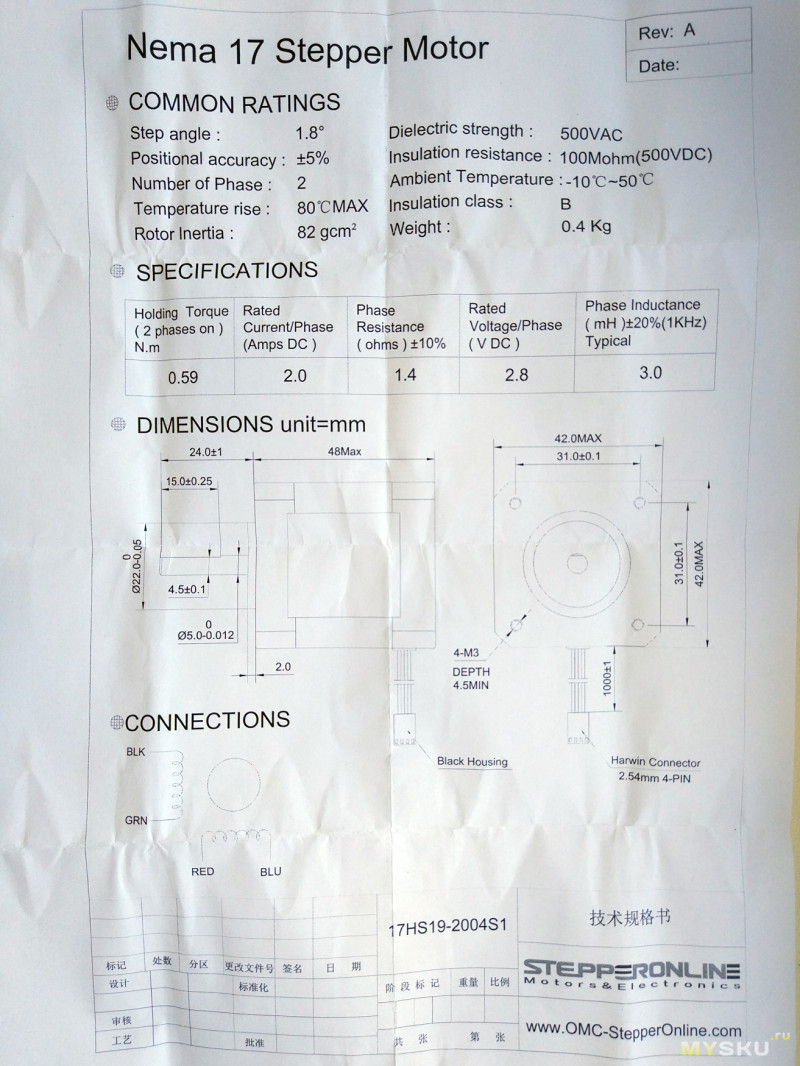
Шаговый мотор NEMA 17 — это биполярный двигатель с высоким крутящим моментом. Может поворачиваться на заданное число шагов. За один шаг совершает оборот на 1,8°, соответственно полный оборот на 360° осуществляет за 200 шагов.
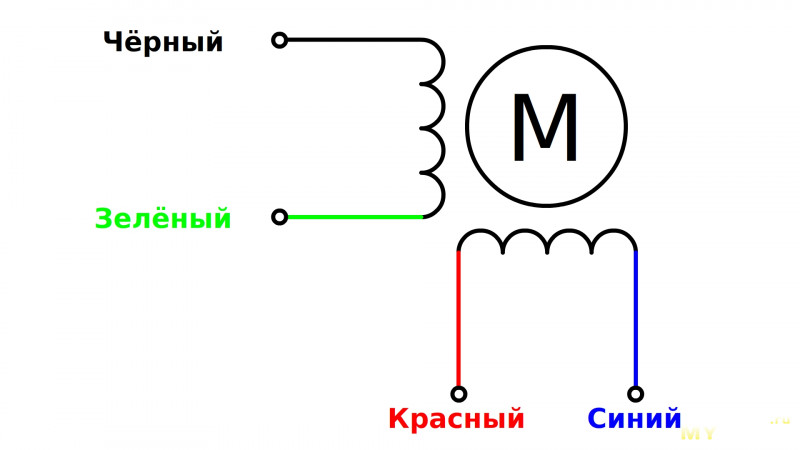
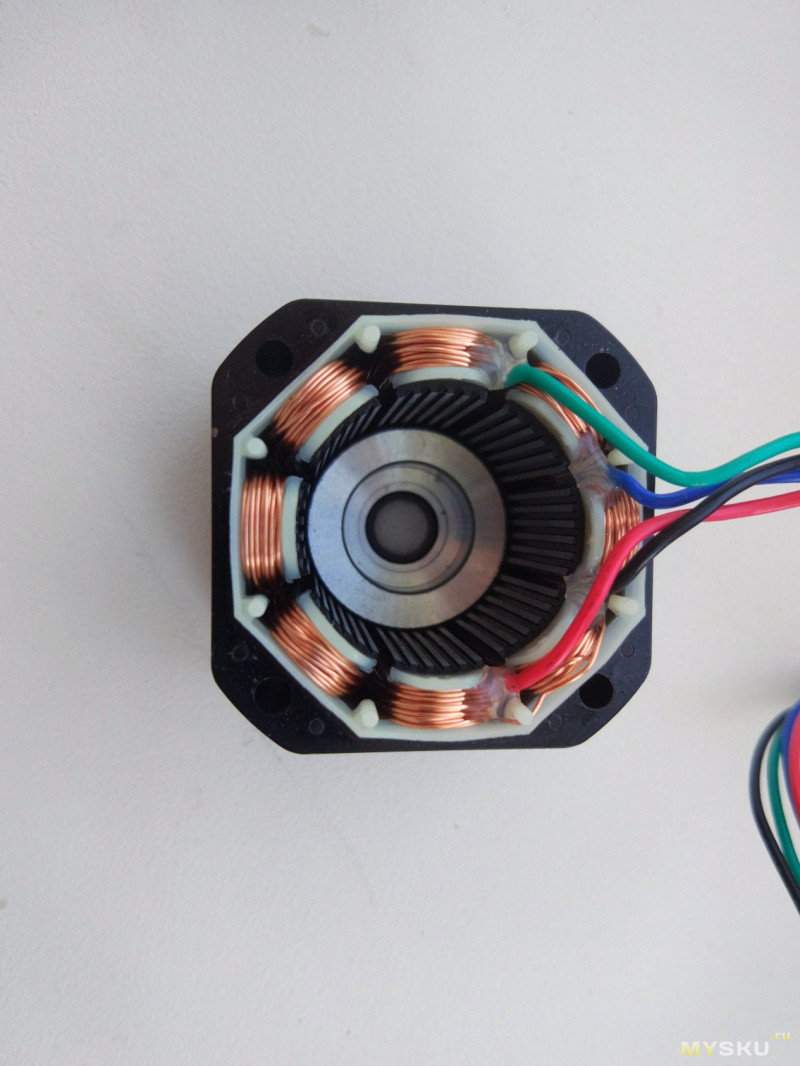
Биполярный двигатель имеет две обмотки, по одной в каждой фазе, которая для изменения направления магнитного поля переполюсовывается драйвером. Соответственно, от мотора отходят четыре провода.



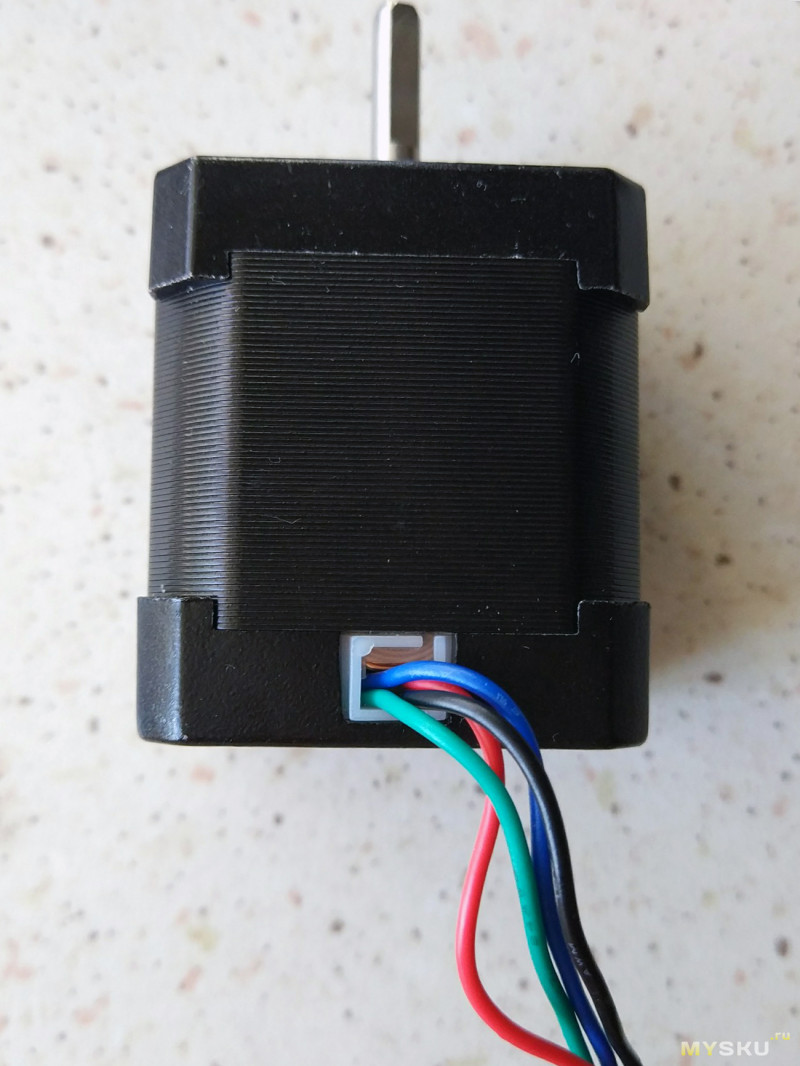
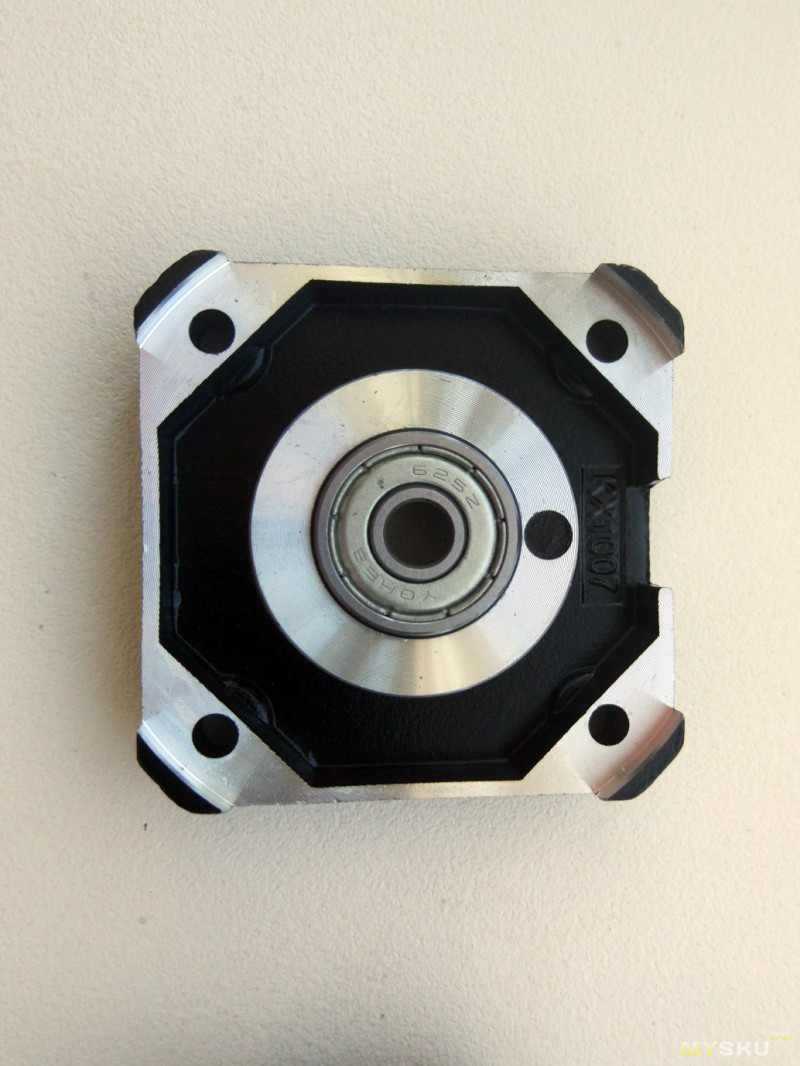
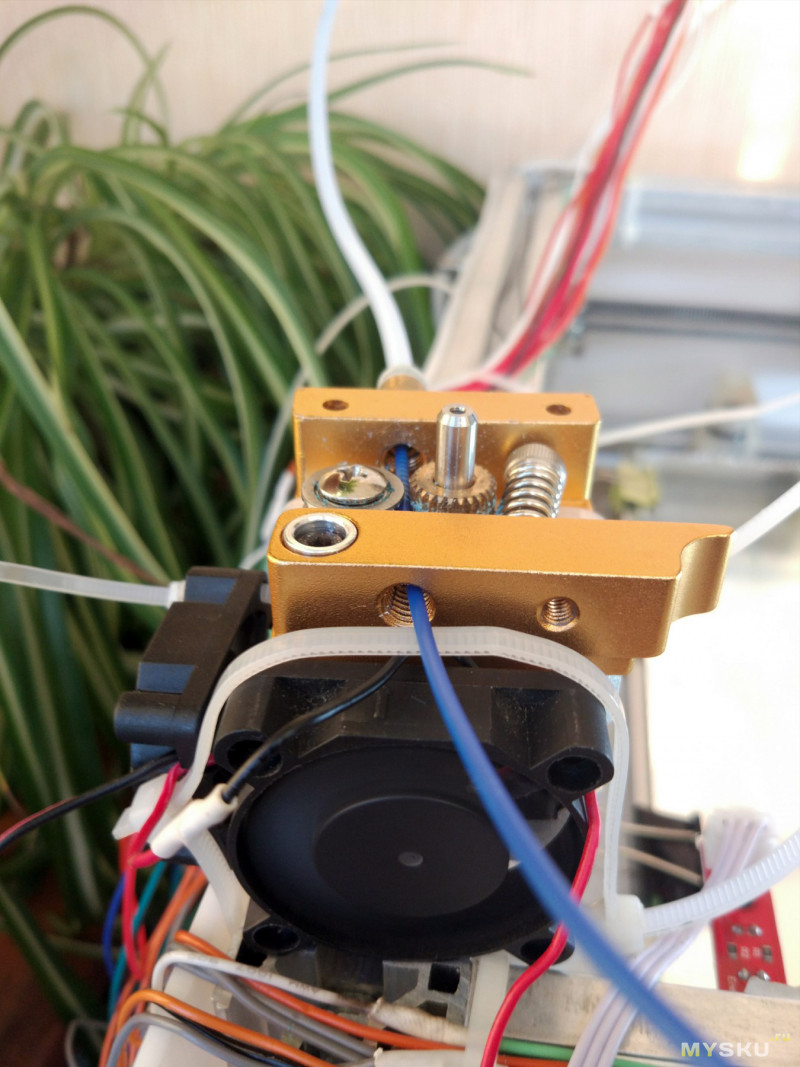
На фотографии виден конструктивный просчет в виде отверстия для проводов, через которое может попасть грязь внутрь двигателя. Это не критично, я закрыл отверстие с помощью изоленты.



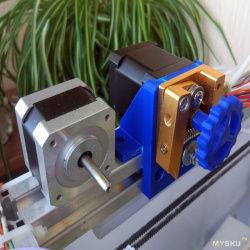
Двигатель подачи был временно закреплен на стяжки)
При скорости 100% двигатель нагревался до:

при скорости 200%:

Во избежании перегрева (пока доставлялся новый двигатель) временно установил два кулера:

Новый двигатель выглядит надежнее:
Замеры показали, что температура уменьшилась практически в два раза:
на скорость 100%:

на скорость 200%:

Все замеры производились спустя 30 минут, после начала
Мои двигатели работают от 12 вольт, на тематических форумах есть информация о переделки RAMPS на 24 вольтовою систему, благодаря, которой двигатели меньше греются, пока времени на переделку нет, но в планах есть.
Единственным минусом считаю, что не продуман вывод проводов, через него виднеется обмотка, на которую может легко попасть различный мусор, что повлияет на работу двигателя. Я решил эту проблему синей изолентой.
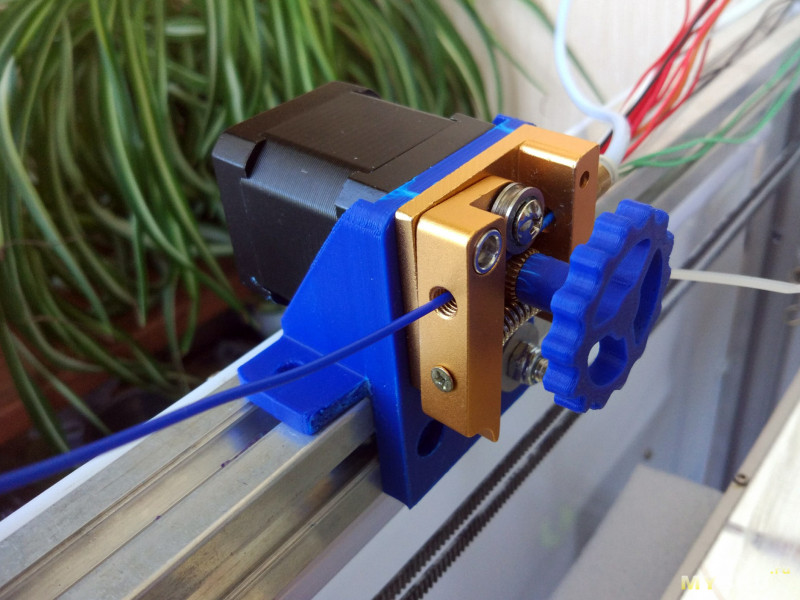
Распечатал крепление, подключил в плате RAMPS и все заработало как надо.
Конечно можно было переделать RAMPS на 24 вольта, но я не думаю, что эффект будет более результативный.
Результатом установки нового двигателя полностью доволен, параметры шага подачи экструдера (95) в прошивке менять не пришлось. К покупке рекомендую.
Если есть вопросы, обращайтесь, постараюсь на них ответить.
Всем спасибо за внимание!
Если обзор понравился, не забываем нажать «Обзор понравился»!) Всем добра!
Некоторое время назад самостоятельно начал собирать 3D принтер HyperCube. Заказал набор самых дешевых шаговых двигателей nemo 17, как позже выяснилось, что экономить не стоило, хотя бы на двигателе, который стоит на подаче экструдера. При печати температура двигателя превышала 60 градусов, собственно из-за чего и пришлось заказать более мощный двигатель.
Шаговый мотор NEMA 17 — это биполярный двигатель с высоким крутящим моментом. Может поворачиваться на заданное число шагов. За один шаг совершает оборот на 1,8°, соответственно полный оборот на 360° осуществляет за 200 шагов.
Биполярный двигатель имеет две обмотки, по одной в каждой фазе, которая для изменения направления магнитного поля переполюсовывается драйвером. Соответственно, от мотора отходят четыре провода.
Упаковка:
Инструкция/характеристики:
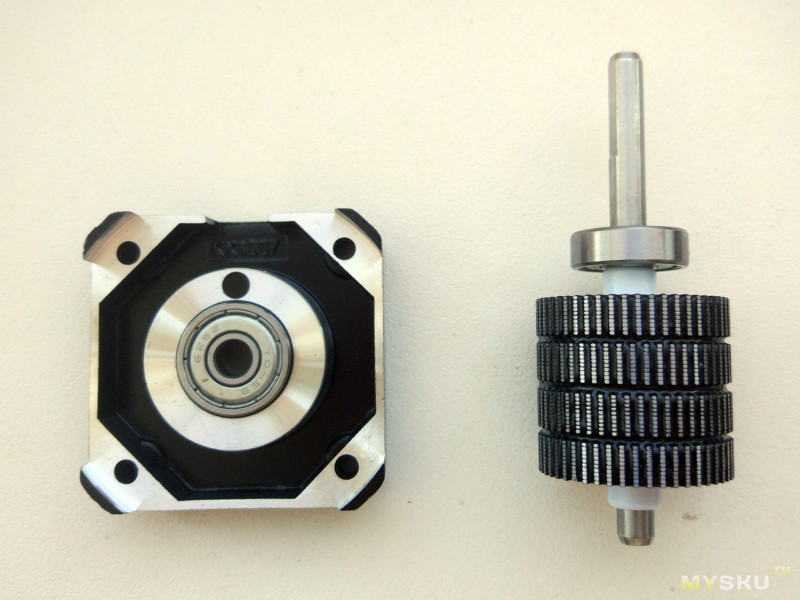
Внешний/внутренний вид:
Этот двигатель координатно от других шаговых двигателей типа nemo 17 ничем не отличается.На фотографии виден конструктивный просчет в виде отверстия для проводов, через которое может попасть грязь внутрь двигателя. Это не критично, я закрыл отверстие с помощью изоленты.
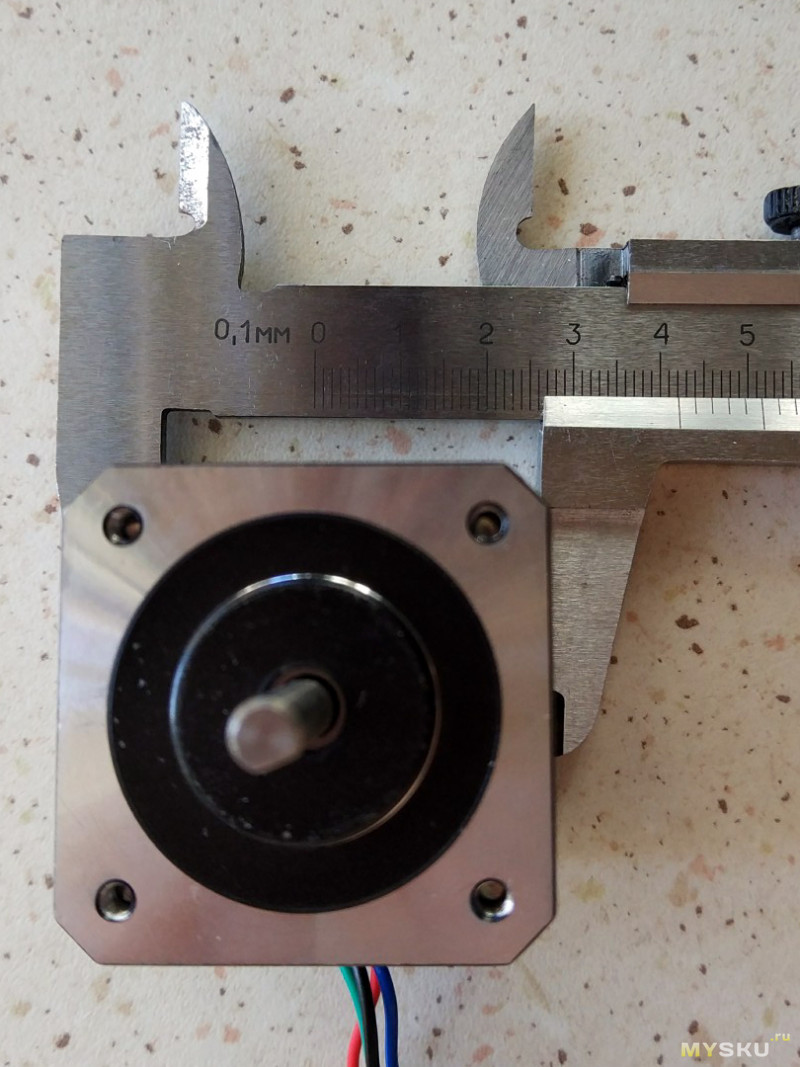
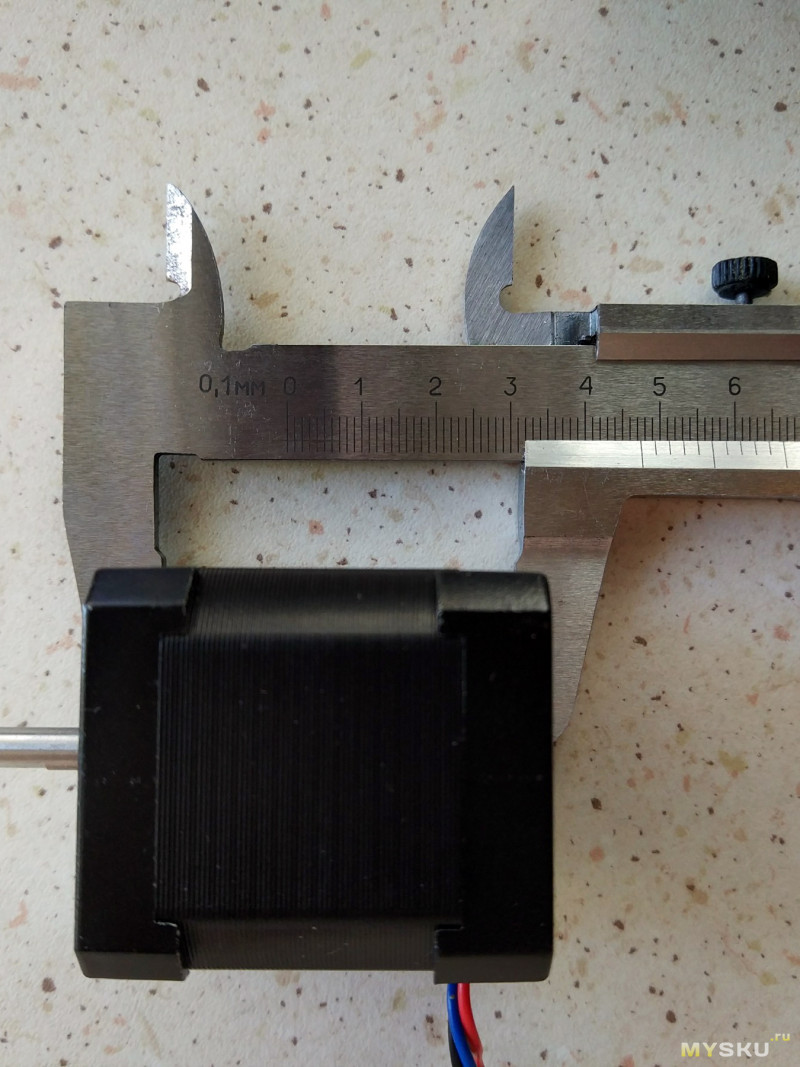
Размеры:
Двигатель подачи был временно закреплен на стяжки)
При скорости 100% двигатель нагревался до:
при скорости 200%:
Во избежании перегрева (пока доставлялся новый двигатель) временно установил два кулера:
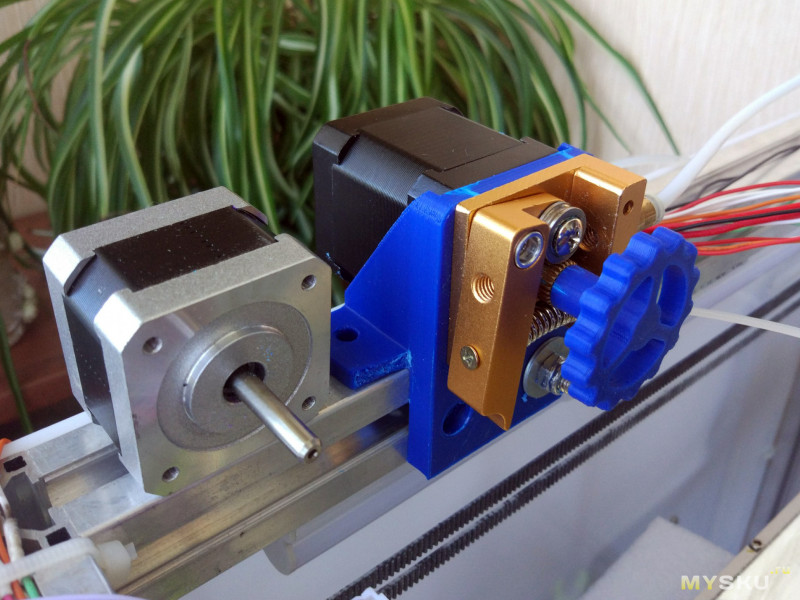
Двигатель старый/новый:
Новый двигатель выглядит надежнее:
Замеры показали, что температура уменьшилась практически в два раза:
на скорость 100%:
на скорость 200%:
Все замеры производились спустя 30 минут, после начала
Мои двигатели работают от 12 вольт, на тематических форумах есть информация о переделки RAMPS на 24 вольтовою систему, благодаря, которой двигатели меньше греются, пока времени на переделку нет, но в планах есть.
Итог:
Двигатель работает стабильно, выполнен качественно.Единственным минусом считаю, что не продуман вывод проводов, через него виднеется обмотка, на которую может легко попасть различный мусор, что повлияет на работу двигателя. Я решил эту проблему синей изолентой.
Распечатал крепление, подключил в плате RAMPS и все заработало как надо.
Конечно можно было переделать RAMPS на 24 вольта, но я не думаю, что эффект будет более результативный.
Результатом установки нового двигателя полностью доволен, параметры шага подачи экструдера (95) в прошивке менять не пришлось. К покупке рекомендую.
Если есть вопросы, обращайтесь, постараюсь на них ответить.
Всем спасибо за внимание!
Если обзор понравился, не забываем нажать «Обзор понравился»!) Всем добра!
Самые обсуждаемые обзоры
| +64 |
2729
105
|
| +54 |
3122
34
|
У станка ч ЧПУ вентиляторы на всех движках стоят
С другой стороны, пишут так же, что на современных шаговиках с редкоземельными магнитами это не так актуально.
Вот одна из таких цитат:
"
А вот тема на одном из форумов с практическими случаями потери момента после разборки-сборки — vri-cnc.ru/forum/viewtopic.php?t=704
Но есть темы и с противоположным результатом — www.cnc-club.ru/forum/viewtopic.php?f=42&t=5028
Так что вопрос неясный :))
Собрать как-то не так можно, конечно, но только в обратную сторону — ротор не будет вращаться из-за перекоса, например, или уйдут зазоры :) Но вставить обратно вынутый ротор так, чтобы он начал свободно вращаться без магнитной фиксации шагов — невозможно без потери намагниченности :)
В случае с шаговым двигателем, мы имеем дело с фактом, который кажется бредом с нашей обывательской (и возможно даже научной) точки зрения, но, тем не менее, он есть и засвидетельствован некоторыми. Просто физика процесса пока не ясна. У Лидскалнина тоже нет этому прямого объяснения, но есть эксперимент, который даёт пищу для ума о процессах, которые могли бы поспособствовать подобному явлению, происходящему при извлечении магнитов из шагового двигателя. Вот описание его эксперимента: "… Поместите шести дюймовый квадратный в сечении прут на верх двух железных зубцов U, установите плотно так, чтобы он лежал ровно. Соедините батарею с электрическим магнитом в течение небольшого времени, теперь отключите батарею, соедините лампочку с электрическим магнитом тем же способом, которым он был связан с батареей, теперь вытяните шести дюймовый брусок, делайте это быстро, и вы увидите свет в лампочке, соедините батарею снова с электрическим магнитом, поместите брусок на железные зубцы, подержите так немного, отключите батарею.
Теперь электрический магнит сохраняет вечное движение магнитного потока. Если не мешать, то это будет продолжаться бесконечно. Я продержал конструкцию в этой позиции в течение шести месяцев, и когда я убрал шести дюймовый брусок, я получил столько же света как в первый раз. Этот эксперимент показывает, что если вы запустите северные и южные единичные магниты на орбиту, то они никогда не остановятся..."
Продолжая мысль — а если вы остановите эти «единичные магниты», вынув магниты, то… возможно произойдёт потеря мощности шагового двигателя.
Пользуйтесь моментом)))
некоторые, кстати, радиаторы ставят на шаговики, чтоб не жужжало
Можно и в NEMA 08 впихнуть 10А, только крутить он от этого не станет так же, как NEMA 51 при тех же 10А :)
Драйвера шаговых двигателей как работают? На ограничении тока. Они подают на обмотку полное напряжение питания, а как только ток достигает установленной величины начинают ШИМить, ограничивая среднее напряжение на обмотке для поддержания заданного тока. А так как сопротивление обмоток обычно единицы/доли ома, то даже в самый маленький двигатель не проблема загнать десятки ампер при напряжении 12 вольт :)
Насчет шимить я не в курсе, но видел банальные стабилизаторы тока, при чем они были линейные.
«А так как сопротивление обмоток обычно единицы/доли ома, то даже в самый маленький двигатель не проблема загнать десятки ампер при напряжении 12 вольт :)» — а то, что обмотка двигателя не только активное сопротивление имеет, но и индуктивное, это ничего?
Это дико неэффективно :) Посчитайте сами сколько на таком драйвере должно рассеиваться мощности в тепло при напряжении питания 12 вольт, токе 1 ампер и сопротивлении обмоток двигателя 5 ом :)
Конечно чего. Я ниже в комментариях уже писал, что индуктивность — главный тормоз максимальной скорости вращения двигателя без существенной потери момента.
Не уверен что на нагрев повлияет, движок как жрал 1 ампер так и будет его жрать, и на весь ампер греться.
А вот на скоростях которые были максимальными прибавится силёнок и предел скорости уйдёт выше (когда достигаешь предмаксимальной скорости, ток в обмотках не успевает нарастать до установленного лимита и движок начинает терять силёнки)
Естественно.
А вообще, питание от 12 вольт — это полный провал :). Мотору нужно 48В (или даже больше) для полноценной работы, причём очень желательно — «настоящие» 48В, без всяких там удвоений в драйвере. Беда в том, что нормальный (промышленный) драйвер стоит как весь принтер. Не, ну можно найти что-то с несколькими (2-3) каналами тысяч 12-15 рублей в России…
понизить ток драйвера + шестерню подачи MK8 (с канавкой) + редуктор без люфтовый (на том же GT2 ремне).
Милейшее дело. У меня щелкал экструдер при 230 градусах и 2А на драйвере. Сделал все это и… и ток поставил 1.2, температуру скинул до 210 ))) Он теперь проталкивает и не нагретый пруток в сопло ))) 2 раза вырывало трубку боудена )
Мне удалось снизить температуру при которой и пластик давится и экструдер не щелкает.
На вопрос зачем (который вы исправили) ответ прост — надежность. Т.е. если на прошлом варианте у меня при 150мм/с уже были затыки, то сейчас и при 250 такой проблемы нет. Но конечно же возрасла нагрузка на мозги, ибо теперь мне надо не скажем 1/32 на шаг и скажем 400 шагов на мм, а 1200 (1600 кажется было, пришлось спустится на 1/16 шага) шагов на мм из-за редуктора. Но и крутящего момента у меня теперь с головой. Правда редуктор снижает максимальную скорость печати.
Очень я сомневаюсь в надежности то…
Купил медведя, по неопытности выставил токи на драйверах в половину, запутался в резисторах (4988). Печатал пол года, проблем не знал. Правда скорости там, больше сотни не поднимешь.
Отдал сыну принтер. Чего-то у него давить перестал. Он просек, что токи не те. Крутанул норму, теперь у него АБС в спирали закручивает, а из сопла хрен да еще чуть-чуть.
Я другой принтер собрал. Токи тоже задирать не стал. На скоростях к 300-ам печатает, только пластик плавится не успевает. Сопло коротенькое, да голова масенькая, менять надо. Так накой мне на этих скоростях такая надежность, чтобы полуразогретый пластик через сопло пихать? Ток добавил по максимуму, пластик лезет, но слои не клеятся друг к другу.
Накой мне ваша надежность…
Почему? При чем вы тут и в надежности сомневаетесь и не знаете зачем она вам.
На самом деле все очень просто. Чтобы было. Карман не тянет. Вот давеча печатал детальку, смысл в том что мост. Если напечатать на большей температуре, то провисает сильно (обува не хватает, да и не хватит). А если на этом слое занизить температуру, то выходит шикарнейше. А межслойную адгезию по периметру потом ацетончиком увеличил. И вышло так что деталь печаталась в один заход и на обработку потребовалось только 5-6 раз кисть в ацетон макнуть. А не было такой дури, то экструдер бы на такой температуре бы защелкал, ну и соответственно не додавило пластика и получилась бы пустота и об адгезии можно было бы забыть.
Ну и 300 мм… интересно на чем печатали? И что вышло из этого?
Вышла штучка под ключики и пр. фигушки. Правда она тоже после шкурки и ацетончика, АБС. 300 так… попробовать, побаловаться…
Собственно, и автору стоило бы купить (он же по этому пути пошёл — покупать:)) титан.
Именно этим обусловлено то, что не появился ramps с отдельной линией питания для движков, драйвера позволяют от 35 до 50 вольт загнать в движки (стандартные драйвера которые в принтерах любят использовать A4988-35в, DRV8825 — 45В, TMC2100 — 46В )
Особые эстеты режут дорожки и запитывают от 24, но их мало и выше 24 точно желающих поднимать почти нет, ибо профита нету.
Да и определяющим фактором в печати обычно является не столько скорость, сколько ускорения, а они тоже зависят от напряжения :)
И опять нет. Смазка там не из сливочного масла, чтобы текла уже при 80 градусах :) Она вполне выдержит и 80 и 150 градусов. А вот редкоземельные магниты в роторе могут терять намагниченность при высокой температуре.
Наркоман что ли.
Напряжение выбирают из 2 факторов, скорость, индуктивность движка. Нахрена в 3д принтере 48 вольт если там большей частью движки низкоиндуктивные?
А про драйвер вообще огонь, даже дешманские A4988 двигатель до 35 вольт могут питать, а если охото то можно взять tb6600 10$-12$ и работай спокойно на 40-42 вольтах если совсем зудит считать 3д принтер суперфрезером.
Но это тупой слив денег, он никогда не достигнет скоростей где даже 24 вольт будет мало.
Если несколько, то сравните тот, который разбирали с остальными просто прокручивая вал руками, не изменился ли на нём момент удержания?
Если один, то не греется ли он выше положенного в работе?
Выше совершенно верно написали про разборку мотора, не стоило этого делать.
У самого лежит живой пример мелкой нема17, когда после разборки двигателя его параметры сильно ухудшились — появился сильный нагрев и ослаб момент по сравнению с остальными братьями.
Какой же ток реально ему нужен?
Я на экструдеры своих принтеров наоборот поставил самые слабые двигатели, там хватает любого.
3dtoday.ru/3d-models/detali-dlya-3d-printerov/chasti-printera/versiya-reduktora-meduza-s-krepleniem-k-profilyu-2020-bouden
До переделки летающего медведя на corexy на него тоже сделал редуктор на основе шестерней титана
3dtoday.ru/3d-models/detali-dlya-3d-printerov/chasti-printera/ekstruder_extitan_dlya_flyingbear_p902
Аналогично хватает самого слабого nema17
P.S. Видимо, ТС предпочёл насиловать большими токами драйвер, лишь бы не менять настройки в прошивке. :) По любому лучше было бы за эти деньги купить реплику титана