Регулятор оборотов Typhoon32 v1.1 Что же с ним не так?

- Цена: 54.99$
- Перейти в магазин
Сегодня поговорим о новой версии 32-х битных регуляторов от фирмы Airbot, которые используются для управления двигателями квадрокоптера.На обзоре у меня Typhoon32 v1.1.
Краткие характеристики версии v1.1:
Питание (LiPo): 3-6s
Поддержка Телеметрии
Поддержка всех протоколов (onehot / Multishot / Dshot / PWM)
Исправлены недочёты версии v1
В новой версии пообещали исправить проблему с перезагрузкой регуляторов если используется аккум выше 4s.Так же обещали исправить проблему самовозгорания регуляторов.
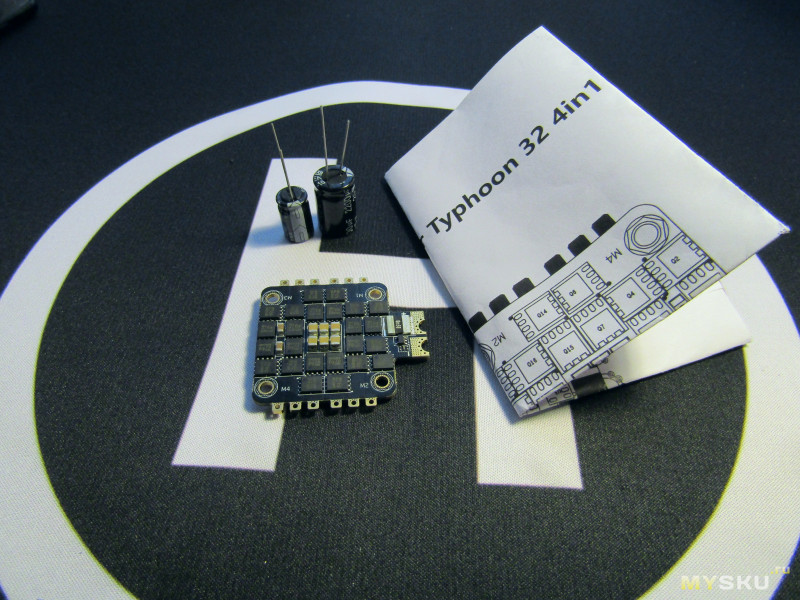
Посылка дошла быстро к упаковке нету претензий.Так же что очень понравилось это наличие отдельных антистатических пакетов у всех комплектующих.
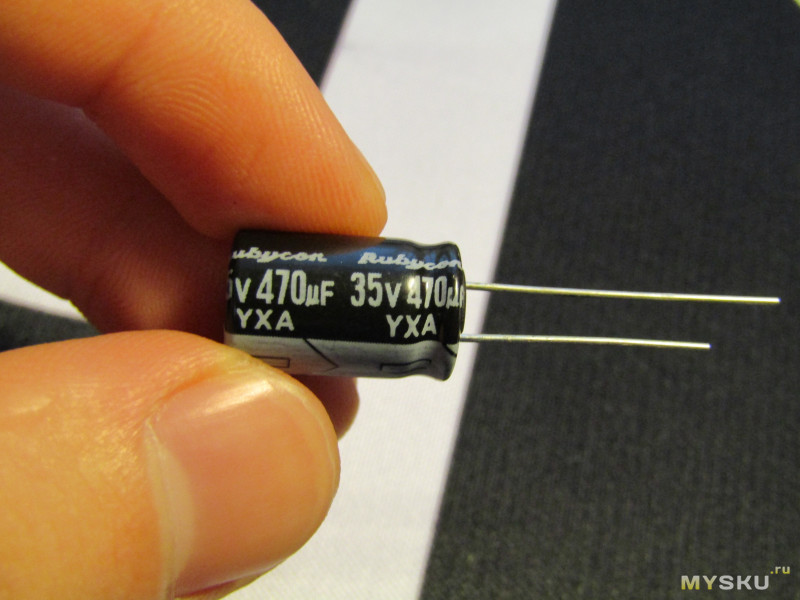
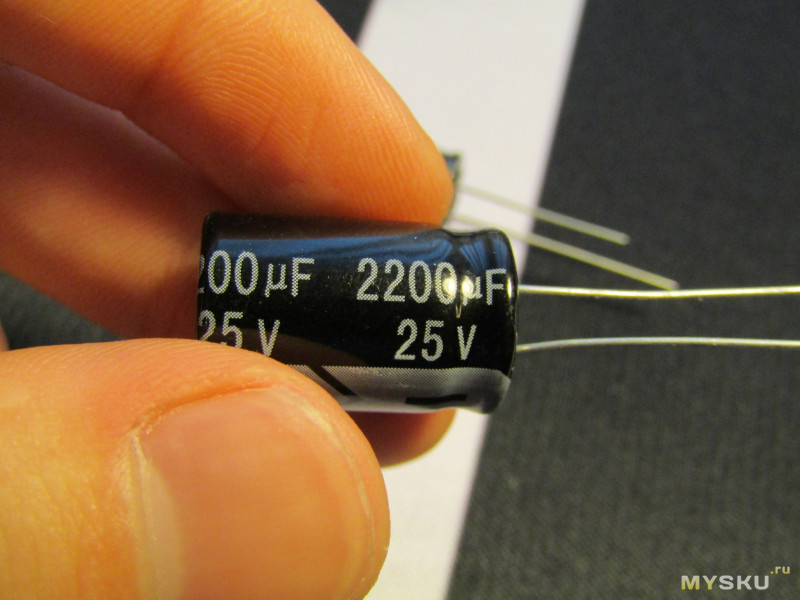
В комплекте получаем: Регулятор, инструкцию(распиновку), конденсатор 25в 2200мкрф и конденсатор 35в 470мкрф.
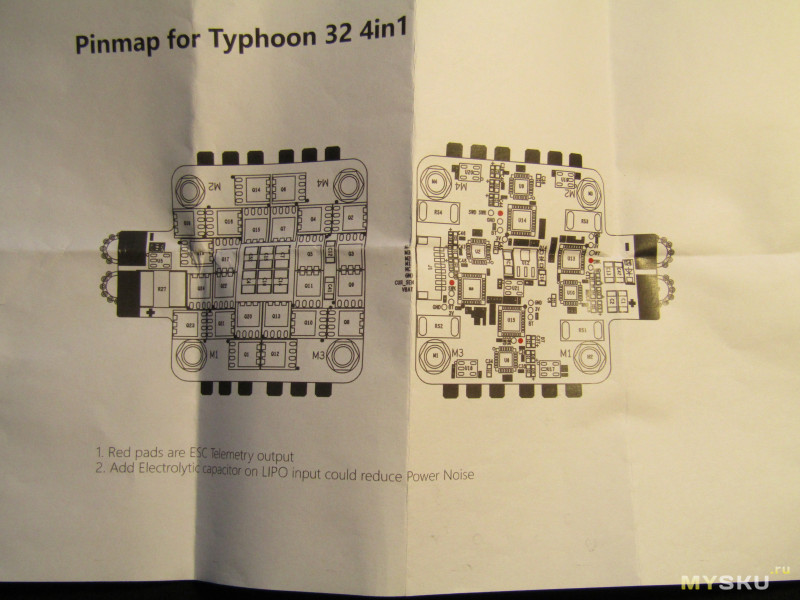
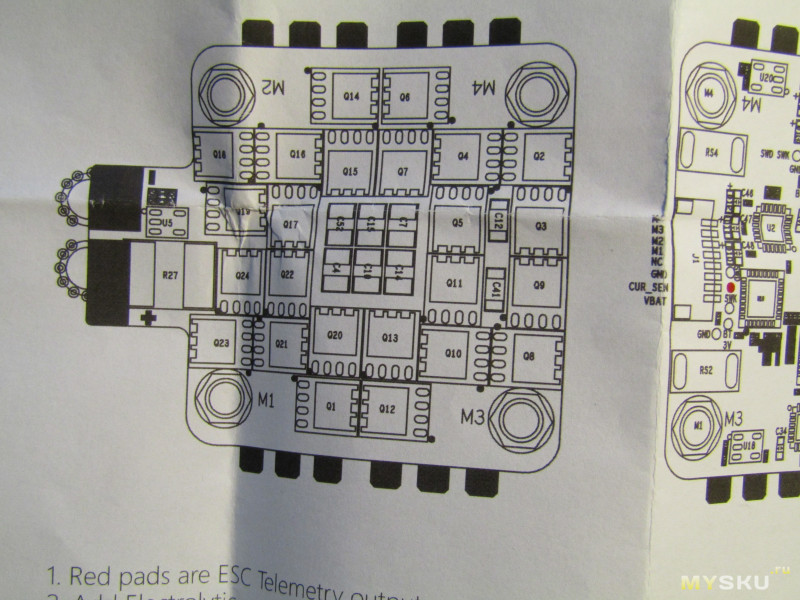
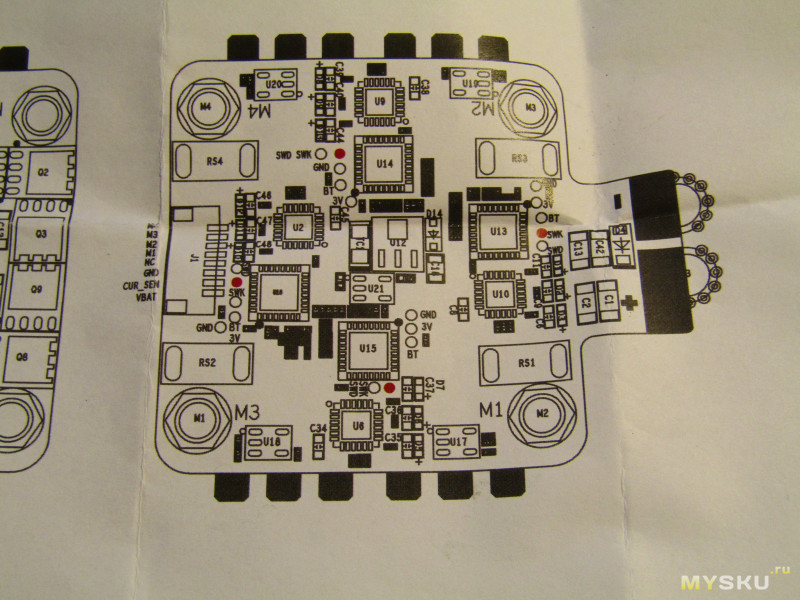
Теперь рассмотрим инструкцию.На ней мы можем увидеть название деталей и если требуется найти их в интернете.Далее есть распиновка основного разъёма, а так же что самое важное — это пины выходов телеметрии с регуляторов(они отмечены красным цветом).
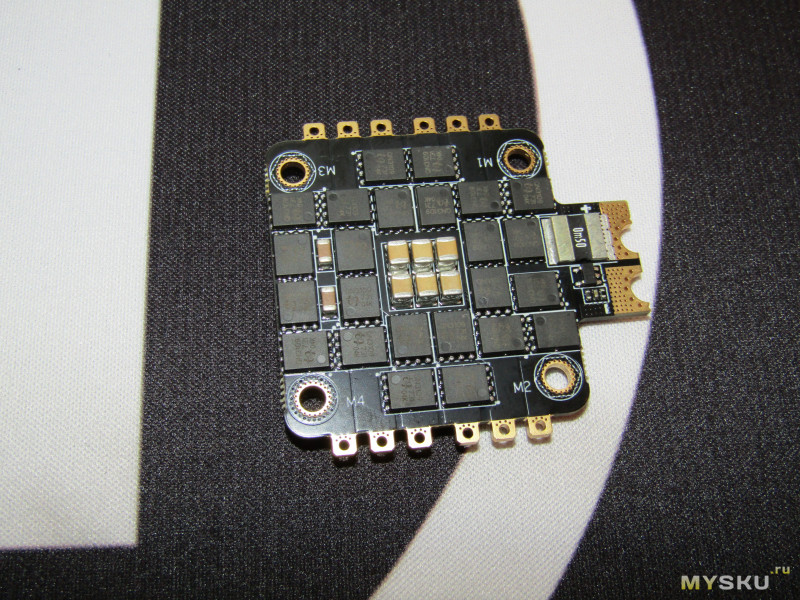
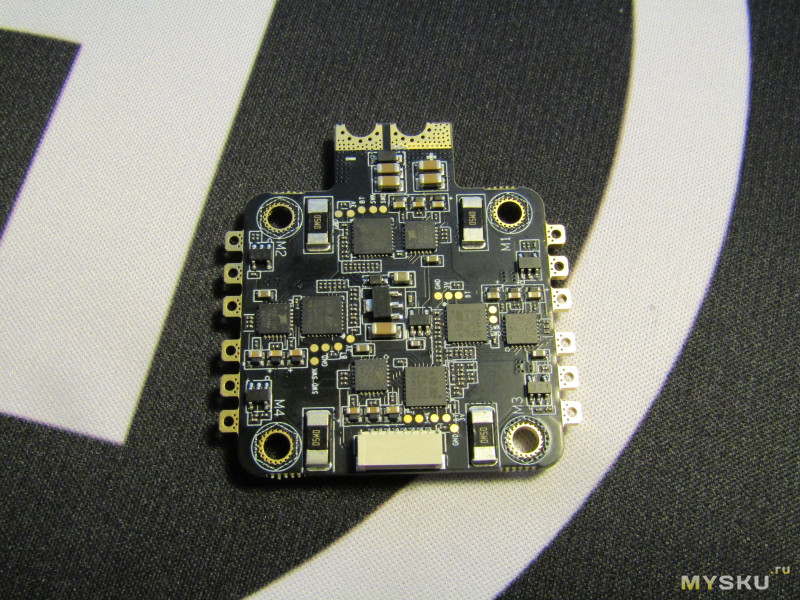
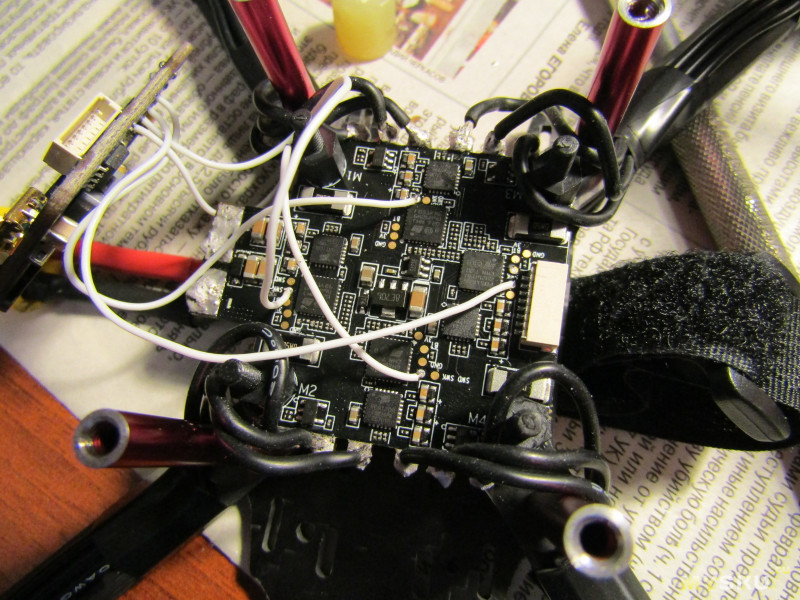
Рассмотрим поближе сам регулятор.Сразу же в глаза бросаются большие мосфеты как у полноценных регуляторов, далее если их пересчитать получаем что на каждый выход мотора у нас 6 мосфетов прям как у больших отдельных регуляторов! Далее видим общий датчик тока, только не понятен смысл его установки так как на обратной стороне нас встречают 4-ре датчика тока каждого регулятора.
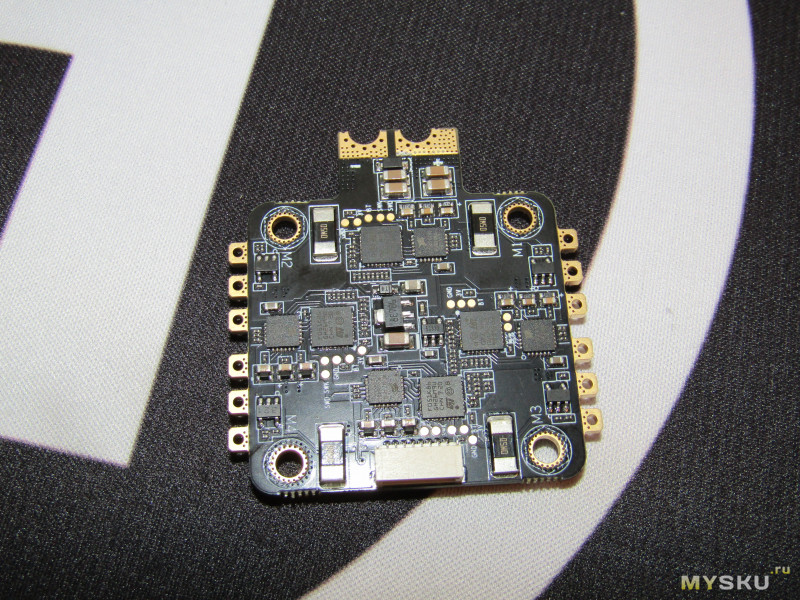
На другой стороне нас встречают 4-ре драйвера и 4-ре 32-х битных процессора.Я впервые вижу что бы на регуляторах четыре в одном ставили отдельные датчики тока на каждый регулятор.Что это нам даёт? Во-первых более чёткое управление за счёт того что мозг видит потребление тока и может ориентироваться на него.Во-вторых за счёт использования телеметрии мы будем видеть токопотребление регуляторов.
Стоит отметить что плата прекрасно отмыта и следов флюсов как на более дешёвых комплектующих нету.Пайка аккуратная, олова везде в меру, всё очень точно и чётко.
После подключения телеметрии давайте посмотрим, а как же собственно мы можем в полёте получить данные?
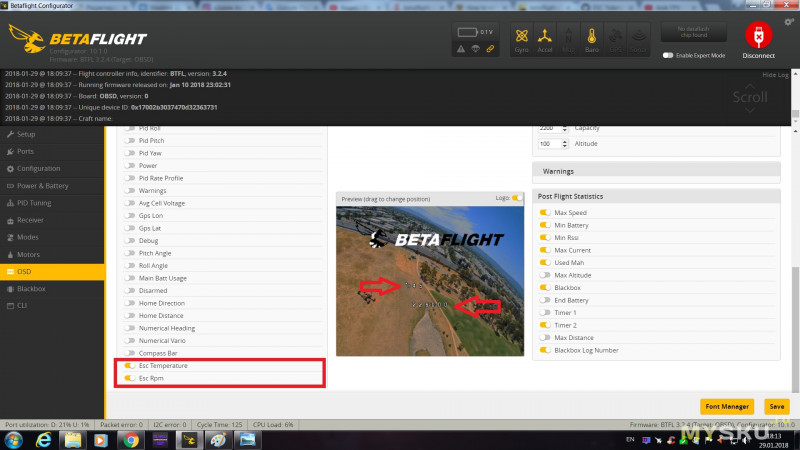
Для этого в конфигураторе Betaflight нужно перейти во вкладку OSD(если ваш полётный контроллер поддерживает данную функцию, иначе вы ни как не сможете видеть данные в полёте), промотать список отображаемых параметров в самый низ и активировать Esc Temperature(температура регуляторов) и Esc Rpm(обороты двигателей).
Всё! Теперь данные будут отображаться на нашем OSD.
На данный момент температура берётся только самого горячего регулятора, а обороты двигателей это усреднённое значение всех 4-х двигателей.
По слухам в прошивке 3.3.0 должны добавить функцию вывода температуры, оборотов, токопотребления для каждого регулятора в отдельности.Но если вам нужны эти данные то можете перейти в конфигураторе во вкладку Power & Battery и там будут отображаться данные для каждого регулятора, к сожалению для этого полётный контроллер должен быть подключен к компьютеру.
А теперь перейдём к ответу что же с этим регулятором не так.Так вот он как и предыдущая версия горит ни с того ни с сего! Ниже распишу подробно об этом.
Собрав и настроив свой новый квадракоптер я включил моторы без пропеллеров(без пропеллеров потребление моторов очень низкое), поднял газ примерно до 40%, так квадракоптер проработал около 30 секунд, послышался лёгкий треск и из него пошёл лёгкий дым.Я моментально отключил аккумулятор от него.Добавлю что запуски и подключение аккумулятора производились только с припаянным конденсатором на 2200мкрф.
Разбираем квадракоптер и осматриваем регулятор.
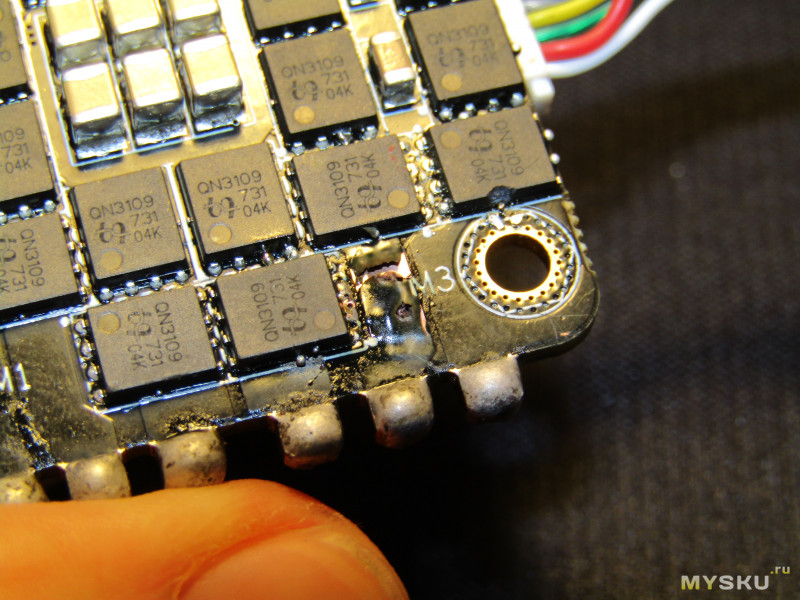
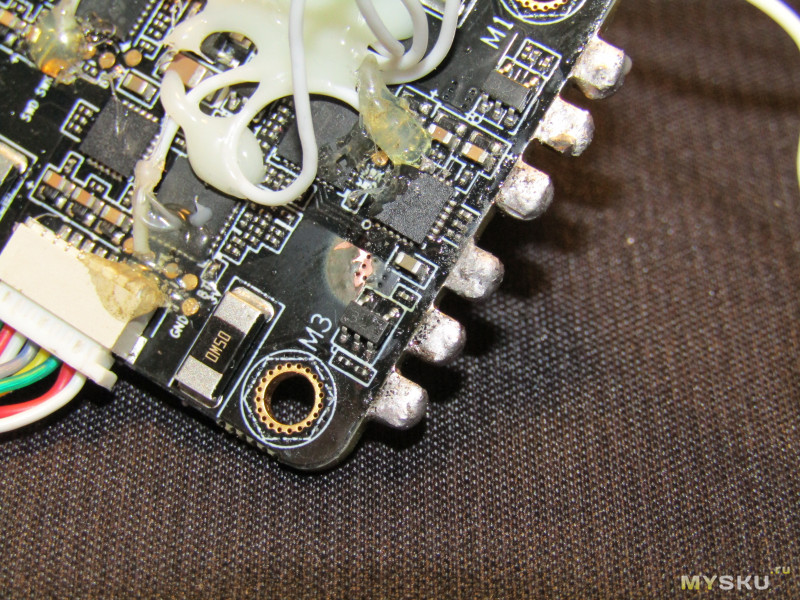
Отчётливо видно что прогорела именно дорожка на плате! Все мосфеты целы, телеметрия работает, конфигуратор так же видит все четыре регулятора и позволяет сохранять настройки и прошивать их.Если же подключить батарею, то ничего не греется и всё адекватно работает.
В шоке от такой неожиданности я написал в поддержку Airbota.Оказалось это довольно распространённая проблема этих регуляторов именно, что выгорает дорожка.Собственно это самый натуральный брак.Поддержка сказала, что вышлет мне уже регуляторы V2 в которой как они заверяют данная проблема исправлена.И действительно если перейти на страничку товара Typhoon32 v2 то основным отличием это исправление каких либо возгораний.
Почитав различные форумы я пришёл к выводу, что проблему перезагрузки регуляторов исправили.Но к сожалению именно я не смог протестировать это.
Теперь выделим плюсы и минусы из всей статьи.
Плюсы:
1)32 битные регуляторы
2)телеметрия каждого отдельного регулятора
3)качественная элементная база и качество пайки
4)исправление перезагрузки при использовании батареи выше 4s
5)отдельный датчик тока для каждого регулятора
Минусы:
1)не самые удобные места для подпаивания пинов телеметрии
2)плохое качество печатной платы
Итог таков, регулятор достойный, но к покупке я бы не советовал, так как вышла уже вторая версия в которой нас уверяют об исправлении возгораний.Если вам прям очень хочется купить версию 1.1 вы можете это сделать, но повезёт ли вам тут дело случая, так как качество плат в этой версии хромает.
Всем кто дочитал огромное спасибо! :)
Краткие характеристики версии v1.1:
Питание (LiPo): 3-6s
Поддержка Телеметрии
Поддержка всех протоколов (onehot / Multishot / Dshot / PWM)
Исправлены недочёты версии v1
В новой версии пообещали исправить проблему с перезагрузкой регуляторов если используется аккум выше 4s.Так же обещали исправить проблему самовозгорания регуляторов.
Посылка дошла быстро к упаковке нету претензий.Так же что очень понравилось это наличие отдельных антистатических пакетов у всех комплектующих.
В комплекте получаем: Регулятор, инструкцию(распиновку), конденсатор 25в 2200мкрф и конденсатор 35в 470мкрф.
Фото конденсаторов
Теперь рассмотрим инструкцию.На ней мы можем увидеть название деталей и если требуется найти их в интернете.Далее есть распиновка основного разъёма, а так же что самое важное — это пины выходов телеметрии с регуляторов(они отмечены красным цветом).
Фото каждой стороны регулятора на инструкции
Рассмотрим поближе сам регулятор.Сразу же в глаза бросаются большие мосфеты как у полноценных регуляторов, далее если их пересчитать получаем что на каждый выход мотора у нас 6 мосфетов прям как у больших отдельных регуляторов! Далее видим общий датчик тока, только не понятен смысл его установки так как на обратной стороне нас встречают 4-ре датчика тока каждого регулятора.
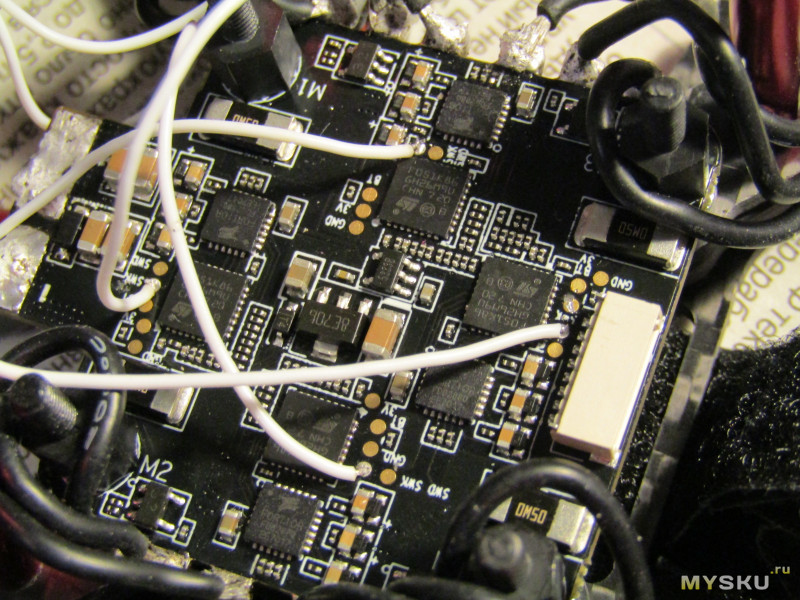
На другой стороне нас встречают 4-ре драйвера и 4-ре 32-х битных процессора.Я впервые вижу что бы на регуляторах четыре в одном ставили отдельные датчики тока на каждый регулятор.Что это нам даёт? Во-первых более чёткое управление за счёт того что мозг видит потребление тока и может ориентироваться на него.Во-вторых за счёт использования телеметрии мы будем видеть токопотребление регуляторов.
Подключение и настройка телеметрии
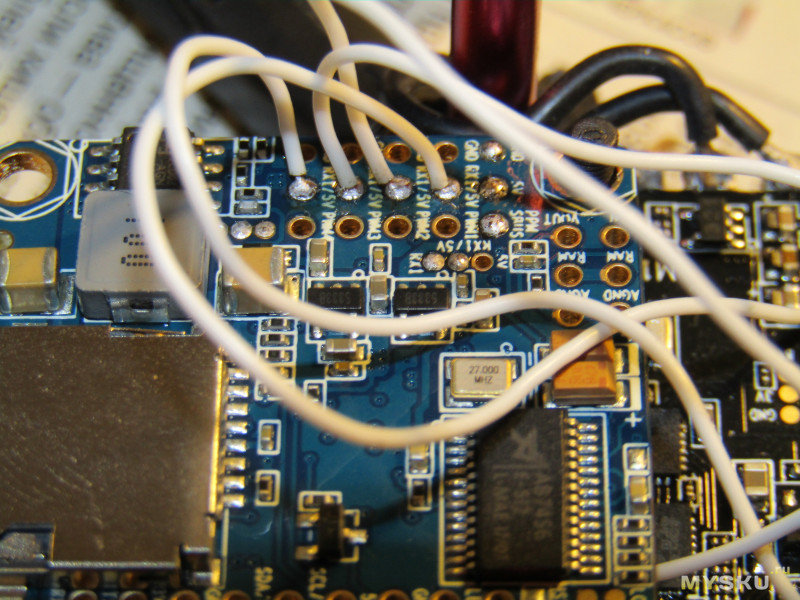
Первым действием припаиваем четыре тонких провода к пинам телеметрии на регуляторе.
Я буду использовать мозг от Airbot F4 V5
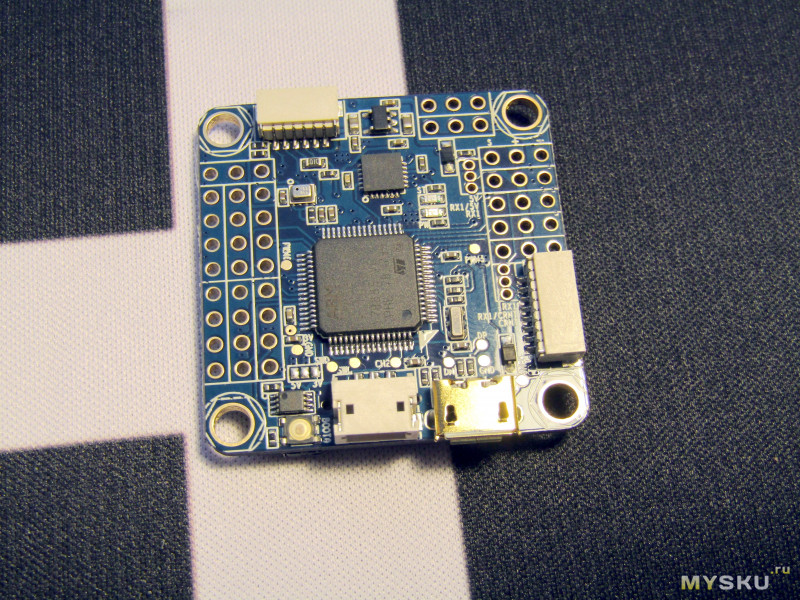
Для того что бы пины которые отмечены стрелкой стали RX, на мозге нужно запаять центральный и нижней контакт которые выделены красным квадратом.
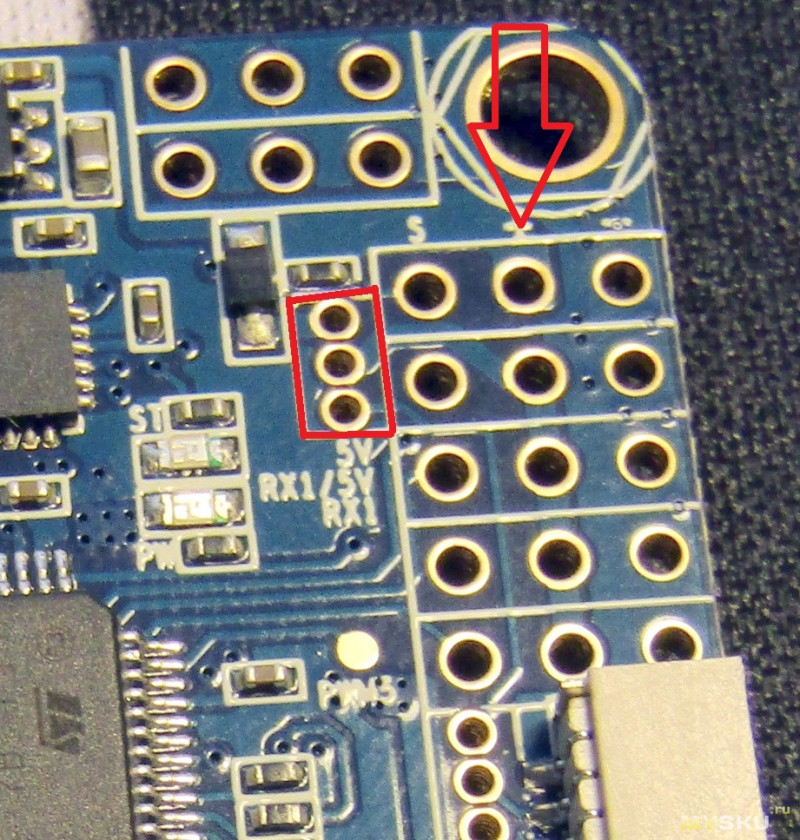
Далее припаиваем к этим пинам в свободном порядке провода телеметрии с регулятора.
После подключаем мозг к компьютеру.
Я буду использовать прошивку Betaflight(рекомендуется прошить мозг версией выше 3.2.0).
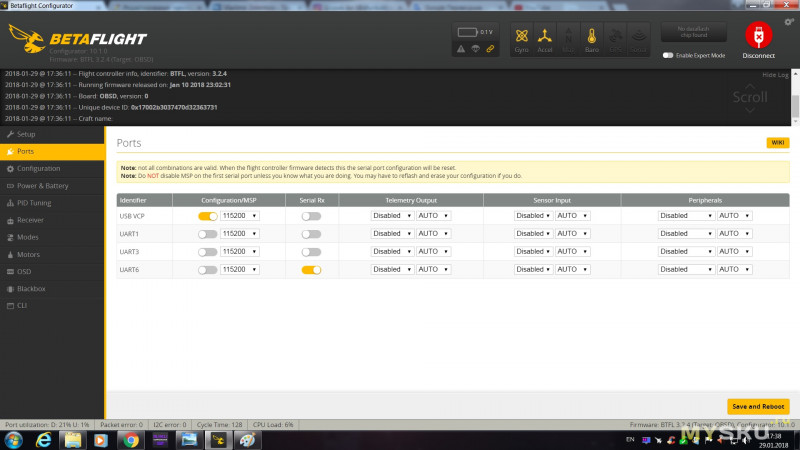
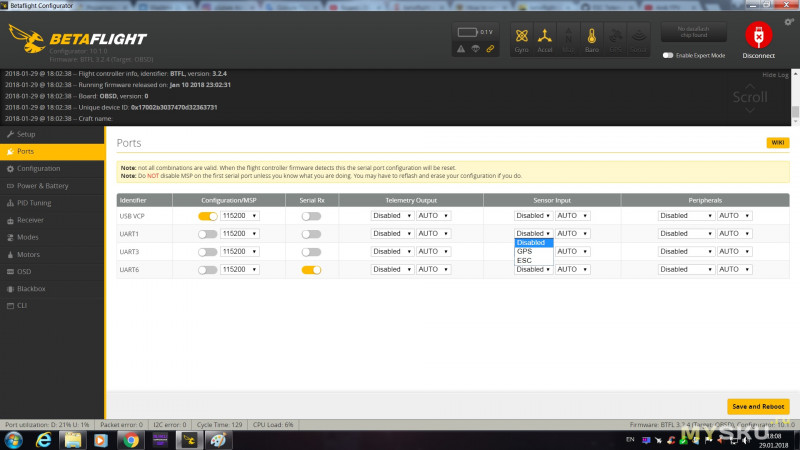
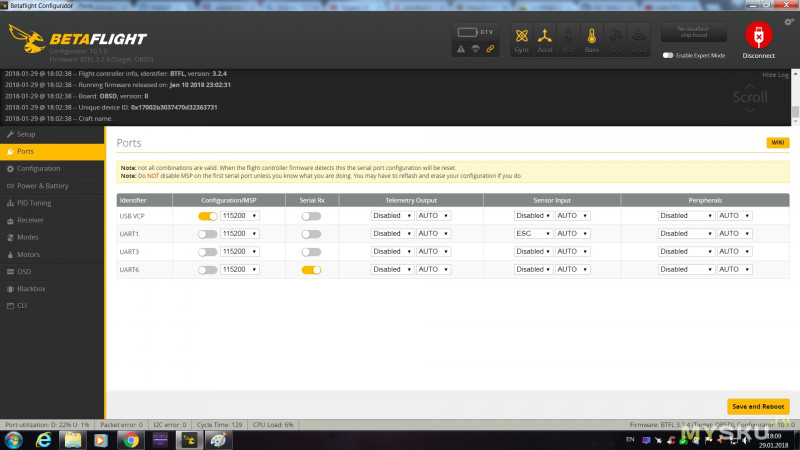
Переходим во вкладку Ports, и выбираем в столбце Sensor Input режим ESC на UAR1 порту.После этого нажимаем в правом нижнем углу на кнопку Save and Reboot.
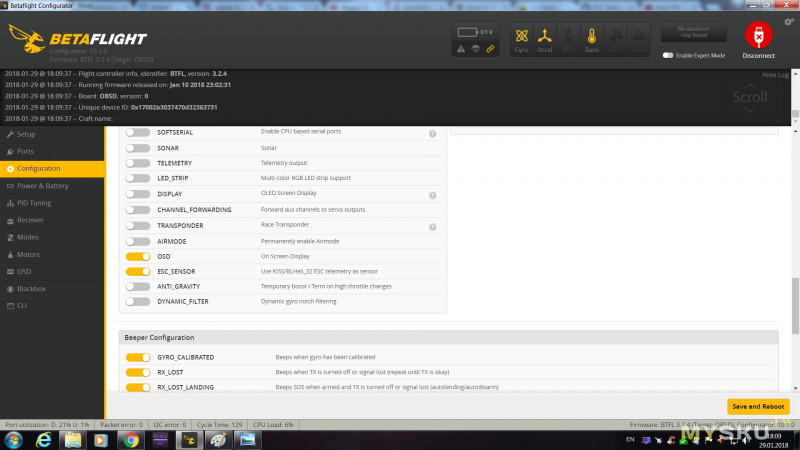
Потом вкладка Configuration, пролистываем её вниз и активируем переключатель ESC_SENSOR, так же опять нажимаем на Save and Reboot.
Следующая вкладка Power & Battery.В параметрах Voltage Meter Source и Current Meter Source нужно выбрать ESC Sensor и нажать внизу с права кнопку save.
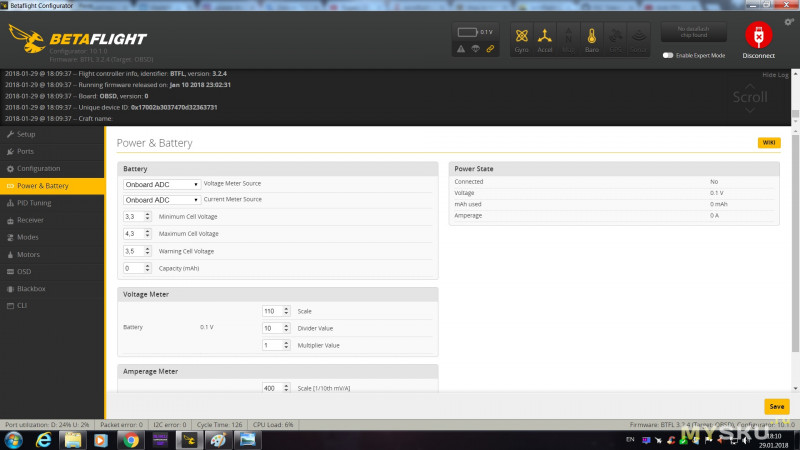
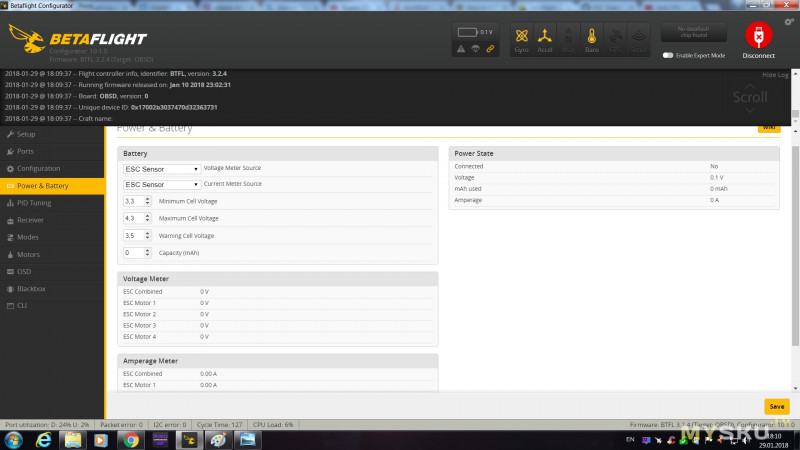
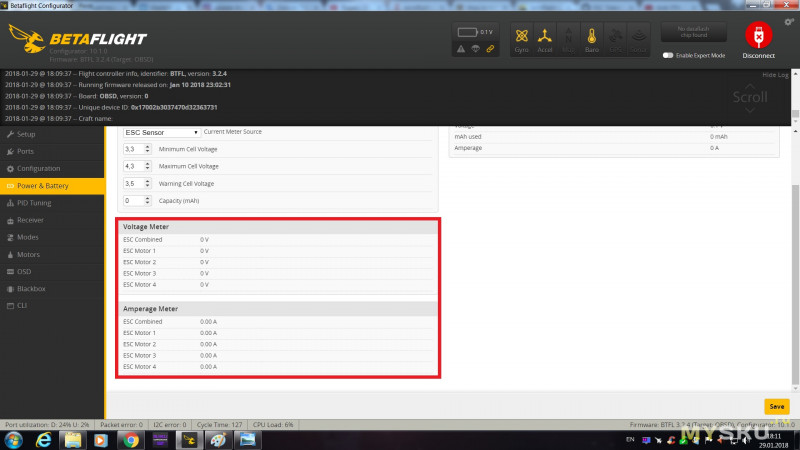
Теперь у нас открылись большие вкладки Voltage Meter и Amperage Meter, здесь будет выводиться информация об общем токе и вольтаже, а также всё это для каждого регулятора.
Я буду использовать мозг от Airbot F4 V5
Для того что бы пины которые отмечены стрелкой стали RX, на мозге нужно запаять центральный и нижней контакт которые выделены красным квадратом.
Далее припаиваем к этим пинам в свободном порядке провода телеметрии с регулятора.
После подключаем мозг к компьютеру.
Я буду использовать прошивку Betaflight(рекомендуется прошить мозг версией выше 3.2.0).
Переходим во вкладку Ports, и выбираем в столбце Sensor Input режим ESC на UAR1 порту.После этого нажимаем в правом нижнем углу на кнопку Save and Reboot.
Потом вкладка Configuration, пролистываем её вниз и активируем переключатель ESC_SENSOR, так же опять нажимаем на Save and Reboot.
Следующая вкладка Power & Battery.В параметрах Voltage Meter Source и Current Meter Source нужно выбрать ESC Sensor и нажать внизу с права кнопку save.
Теперь у нас открылись большие вкладки Voltage Meter и Amperage Meter, здесь будет выводиться информация об общем токе и вольтаже, а также всё это для каждого регулятора.
Стоит отметить что плата прекрасно отмыта и следов флюсов как на более дешёвых комплектующих нету.Пайка аккуратная, олова везде в меру, всё очень точно и чётко.
После подключения телеметрии давайте посмотрим, а как же собственно мы можем в полёте получить данные?
Для этого в конфигураторе Betaflight нужно перейти во вкладку OSD(если ваш полётный контроллер поддерживает данную функцию, иначе вы ни как не сможете видеть данные в полёте), промотать список отображаемых параметров в самый низ и активировать Esc Temperature(температура регуляторов) и Esc Rpm(обороты двигателей).
Всё! Теперь данные будут отображаться на нашем OSD.
На данный момент температура берётся только самого горячего регулятора, а обороты двигателей это усреднённое значение всех 4-х двигателей.
По слухам в прошивке 3.3.0 должны добавить функцию вывода температуры, оборотов, токопотребления для каждого регулятора в отдельности.Но если вам нужны эти данные то можете перейти в конфигураторе во вкладку Power & Battery и там будут отображаться данные для каждого регулятора, к сожалению для этого полётный контроллер должен быть подключен к компьютеру.
А теперь перейдём к ответу что же с этим регулятором не так.Так вот он как и предыдущая версия горит ни с того ни с сего! Ниже распишу подробно об этом.
Собрав и настроив свой новый квадракоптер я включил моторы без пропеллеров(без пропеллеров потребление моторов очень низкое), поднял газ примерно до 40%, так квадракоптер проработал около 30 секунд, послышался лёгкий треск и из него пошёл лёгкий дым.Я моментально отключил аккумулятор от него.Добавлю что запуски и подключение аккумулятора производились только с припаянным конденсатором на 2200мкрф.
Разбираем квадракоптер и осматриваем регулятор.
Отчётливо видно что прогорела именно дорожка на плате! Все мосфеты целы, телеметрия работает, конфигуратор так же видит все четыре регулятора и позволяет сохранять настройки и прошивать их.Если же подключить батарею, то ничего не греется и всё адекватно работает.
В шоке от такой неожиданности я написал в поддержку Airbota.Оказалось это довольно распространённая проблема этих регуляторов именно, что выгорает дорожка.Собственно это самый натуральный брак.Поддержка сказала, что вышлет мне уже регуляторы V2 в которой как они заверяют данная проблема исправлена.И действительно если перейти на страничку товара Typhoon32 v2 то основным отличием это исправление каких либо возгораний.
Почитав различные форумы я пришёл к выводу, что проблему перезагрузки регуляторов исправили.Но к сожалению именно я не смог протестировать это.
Теперь выделим плюсы и минусы из всей статьи.
Плюсы:
1)32 битные регуляторы
2)телеметрия каждого отдельного регулятора
3)качественная элементная база и качество пайки
4)исправление перезагрузки при использовании батареи выше 4s
5)отдельный датчик тока для каждого регулятора
Минусы:
1)не самые удобные места для подпаивания пинов телеметрии
2)плохое качество печатной платы
Итог таков, регулятор достойный, но к покупке я бы не советовал, так как вышла уже вторая версия в которой нас уверяют об исправлении возгораний.Если вам прям очень хочется купить версию 1.1 вы можете это сделать, но повезёт ли вам тут дело случая, так как качество плат в этой версии хромает.
Всем кто дочитал огромное спасибо! :)
| +62 |
49253
47
|
Самые обсуждаемые обзоры
| +90 |
2447
32
|
| +35 |
1978
63
|
Кажеться ето драйвер двигателей для квадрокоптера.
Вопрос — зачем он нужен, если есть дешевые и качественные регули?
Представьте — у Вас на OSD инфа — высота, дальнось, сила тока, расход батареи, напряжение аккума, время полета, направление до дома, режим полета, спутники, расход газа и прочее. Зачем Вам еще четыре индикатора? Вы Юлий Цезарь, чтобы все это контролировать?
К тому же, выходит, что этот регуль еще и некачественный. Зачем?
Данный регулятор управляет вращением мотора квадрокоптера.А 32-х битная прошивка, это новая прошивка позволяющая использовать телеметрию и работать с более высокой скоростью недели предыдущие версии.
Какая дорожка сгорела?
У второго регулятора сгорела центральная дорожка вывода на мотор.На данный момент если припаять мотор то он не будет вращаться.
Само собой я припаял три фазы двигателя к трем фаза регулятора.Если раскроете вкладку подключение и настройка телеметрии то там отчётливо видно что моторы припаяны ко всем трём фазам.
Когда у Вас выгорела дорожка на плате, или не работает корректно драйвер, то уже не имеет значения сколько проводов припаяно, фактически подключено два.
потому как
Надеюсь крепили не винтами? Вообще аирботы за такой ценник могли бы поставить что нибудь получше этого нонейма…
И еще бросились в глаза шарики олова в разных местах.
Вообще не рекомендуется гонять регули без пропов. Особенно высокоскоростные. У них при этом очень высокий самоэдс и следствием как раз часто является дымок из регулей.
На счёт работы без пропов, так газа высокого не было, не думаю что это повлияло к выгоранию дорожки.
А выгорание дорожки — это вторичный эффект. Судя по всему пробился один из ключей и шарахнул сквозной ток.
Надо проверять все ключи.
Пока что все регули 4-в-1 сделаны методом чисто механического сцепления 4-х регулей.
Я пока что не видел регуля, где бы один процессор управлял сразу 4-мя моторами (хотя мощи современных процессоров хватит моторов на 10 :) ).
STM32F051 — ох сколько проблем я ними хватанул однажды. ADC ужасное UART глючный, как можно делать столь ответственный регулятор на нём…
На счёт процессор не знаю, не знаком с ним.Но тут новая прошивка написанная уже на языке Си как утверждают разработчики.Возможно они поправили все проблемы данной прошивкой.
Как приедет новая версия регулятора обязательно заострю внимание на процессоре.
Хотя я не в теме и пока не до конца понимаю что он должен вычислять, синусы-косинусы ориентации, pid регуляцию или просто шим какой-то генерировать…
Так можно и до ардуины докатиться, зачем её вылизывать эту производительность…
Не вижу предмета спора.
(Я имел в виду что производительность от частоты, а не от разрядности могла возрасти)
Я не против новых фич хоть на ардуине, хоть на дико жрущей электричество esp8266 если они работают хоть как-то…
Куча всяких сервисных фич (защиты от малых оборотов, стабилизация оборотов и много-много чего еще).
В общем-то — и на 8-ми битных процессорах работало, но только на ассемблере.
32-х битники в основном удобнее за счёт более быстрой адресной арифметики и повышения частоты. От самой 32-х битности выигрыш невелик.