Asgard32 новый зверь на рынке комплектующих для квадрокоптеров.

- Цена: 79.99$
- Перейти в магазин
Относительно недавно появилось сие чудо на рынке, а так как предыдущая версия Asgard-a была более чем удачная я решил рассказать вам о новой версии Asgard-a которую можно в прямом смысле назвать зверем.
Перед обзором хочу сказать что Asgard32 находится в публичном тестировании вследствие чего в будущем возможны некие изменения(которые уже были замечены, но о всём по порядку.)
Уверен у 99% людей в голове возник вопрос, а что же такое собственно Asgard? Постараюсь в кратце ответить на этот вопрос.
Asgard это мозг для квадрокоптера совмещенный с 4 регуляторами оборотов для бесколлекторных двигателей.Всё это находится на одной плате что уменьшает количество пайки и даёт существенную экономию в весе.
-процессор F4
-гироскоп MPU6000 подключенный по шине spi(что даёт возможность увеличить частоту обновлений гироскопа до 8мгц)
-отверстия для крепления 30.5x30.5mm(стандартные)
-поддержка 3-4s lipo аккумуляторов
-5в бек на 2А
-наличие осд чипа
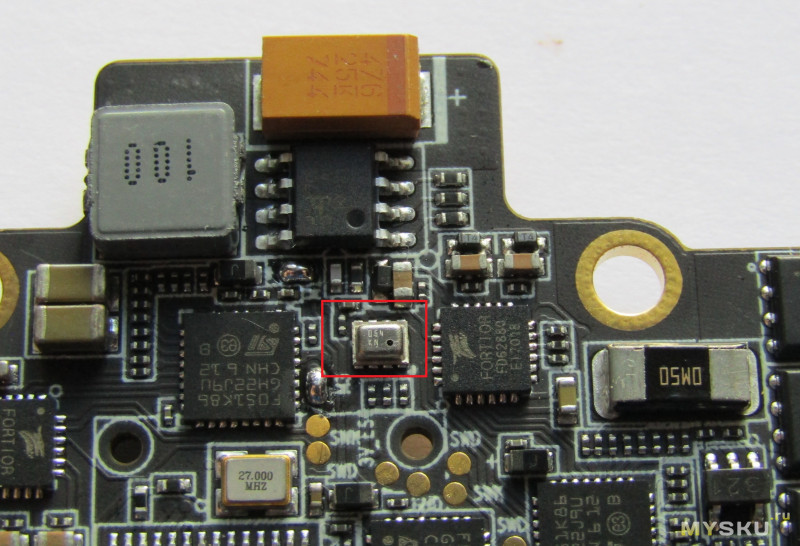
-барометр BMP280
-4 32-х битных регулятора оборотов
-6 юарт портов(на данные порты мы можем повесить различную переферию, к примеру gps, компас, управление камерой и т.д.)
Посылка пришла в картонной коробке, внутри был пакет с пупырками в котором лежал сам Asgard в антистатичном пакете.К упаковке претензий нет, риск поломки при транспортировке снижен к минимуму.
Плата и вся пайка выполнены на высоком уровне, всё чисто, отмыто от флюса.
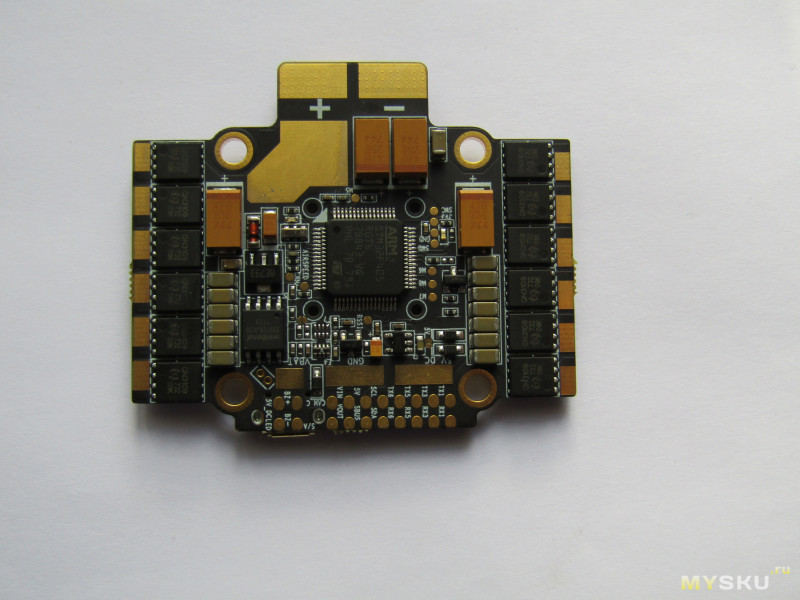

Теперь предлагаю детально осмотреть сначала одну сторону платы, потом другую, сделать некие выводы и перейти к установке на квадрокоптер.
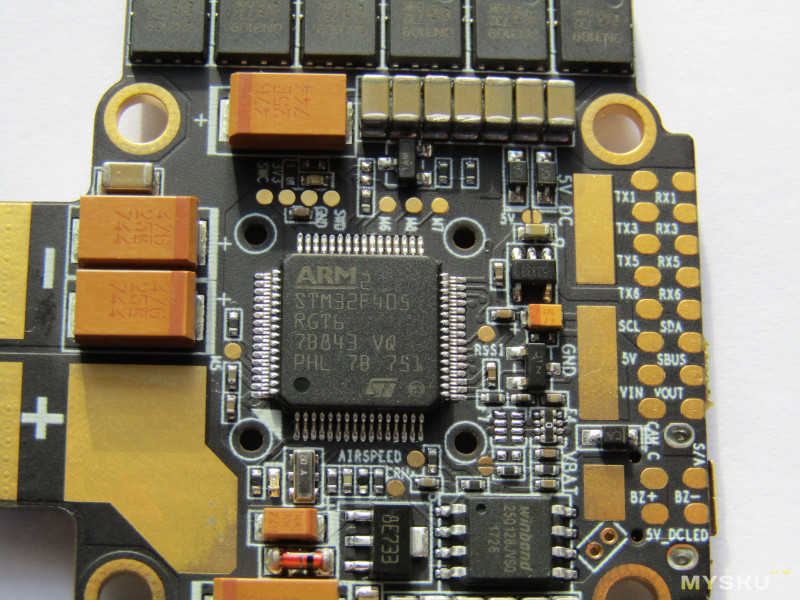
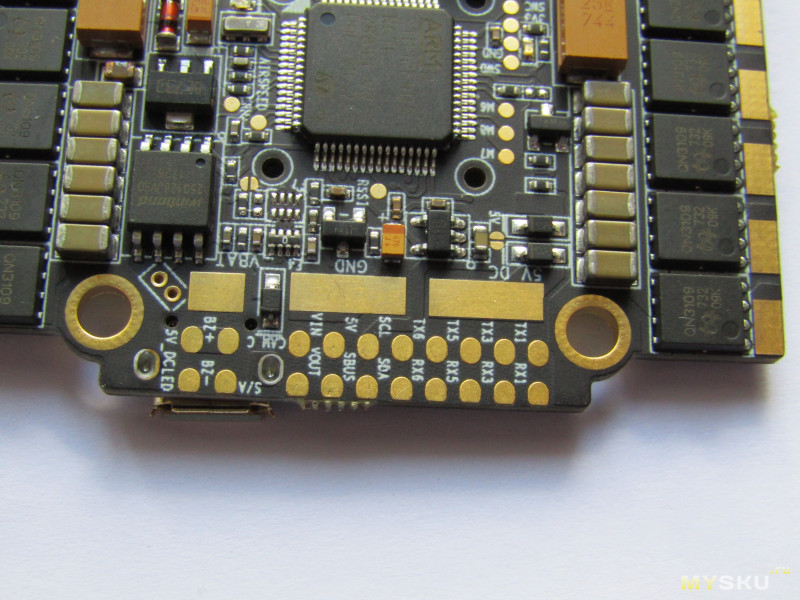
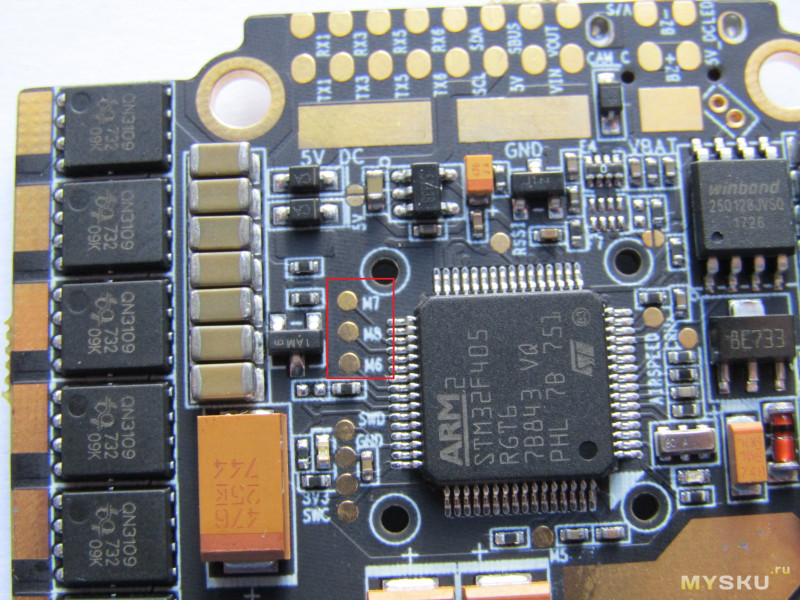
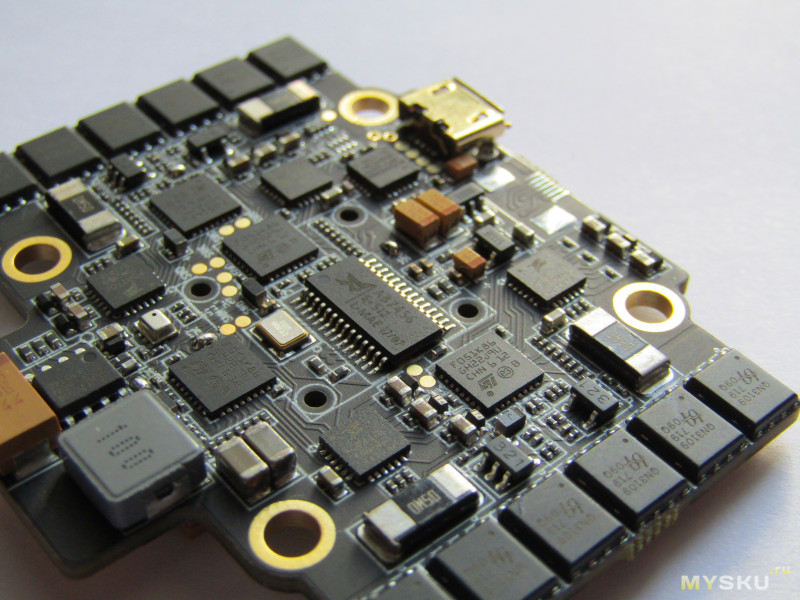
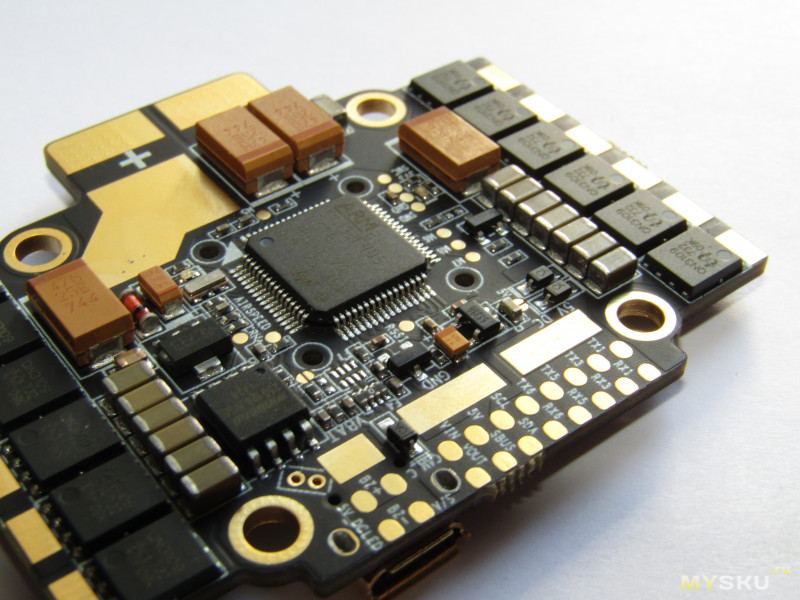
Центральный процессор у нас F405RGT6
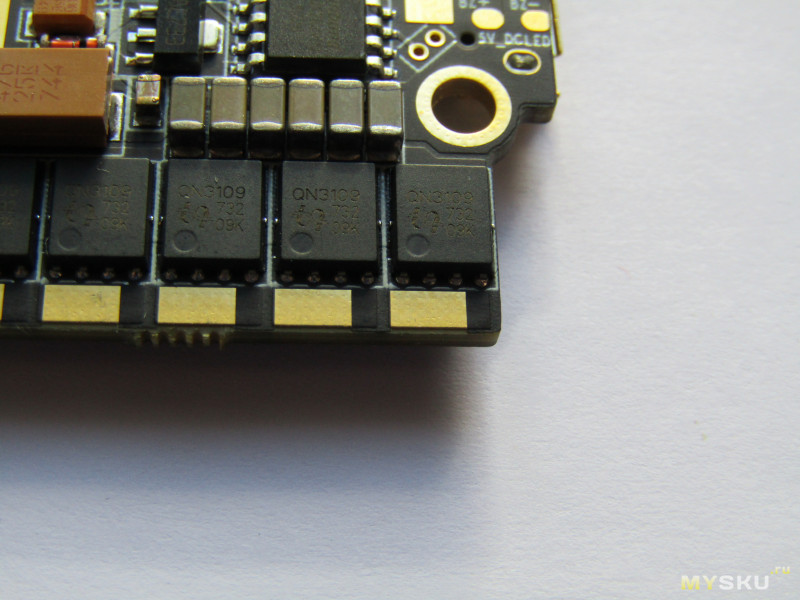
Мосфеты используются QN3109.Я либо плохо разбираюсь в даташитах либо мосфеты и вправду рассчитаны на максимальный ток 150А!!! Если это правда, то шанс выхода из строя мосфета сводится просто к минимуму!
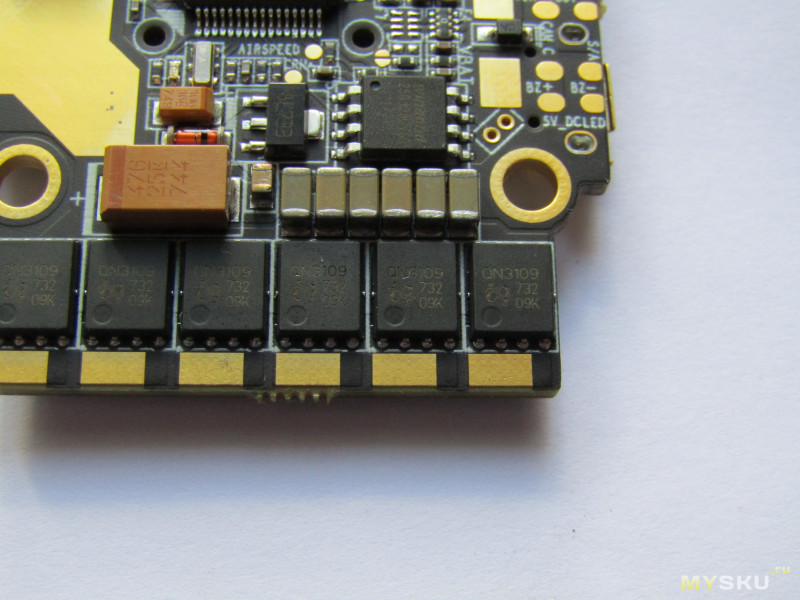
На входе стоят два больших танталовых конденсатора.Так же по бокам чуть выше стоят ещё 2 таких же конденсатора.По заявлению производителя использовать дополнительные конденсаторы не требуется.

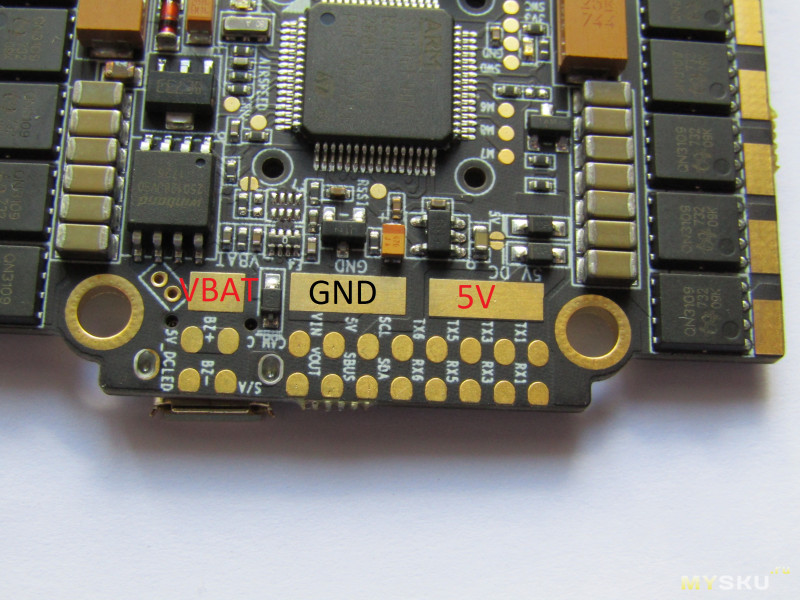
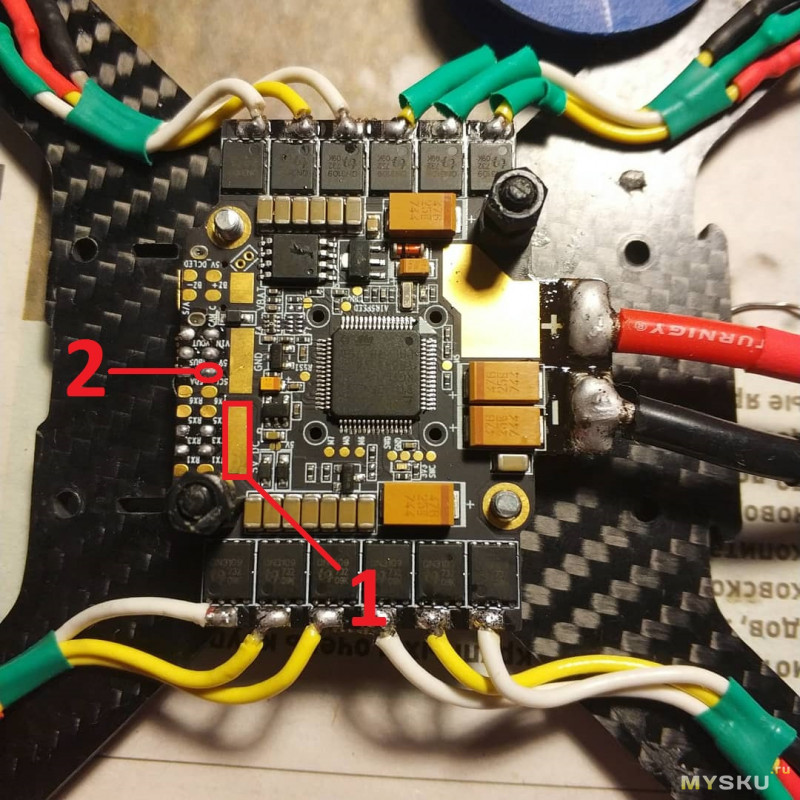
Далее находятся пяточки для припаивания приёмника радиоуправления, видео передатчика, видео камеры, различных периферийных устройств.Так же очень удобно сделаны дополнительные выводы земли,5в и одна площадка напрямую соединена с + контактом батарейки(эти 3 площадки выполнены в форме прямоугольников)
Порадовала возможность подключение доп регуляторов и сделанные под них отдельные управляющие пяточки(1 фото)
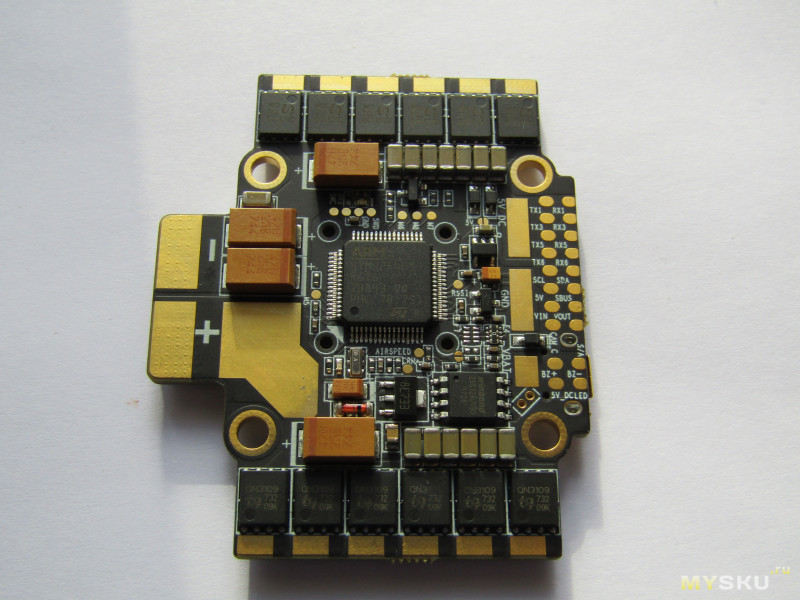
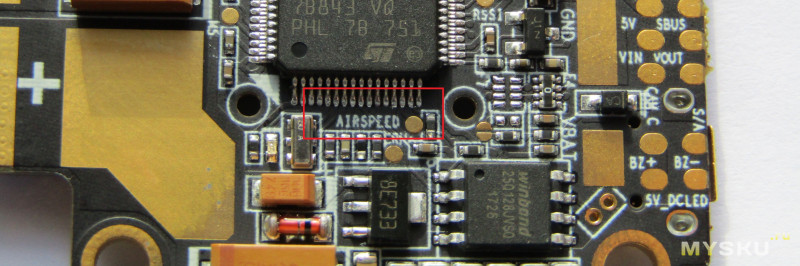
Из интересного есть пяточёк для подключения датчика воздушной скорости но на кой он нам на гоночном квадрокоптере я без понятия, пятак есть я и показываю :) (2 фото)
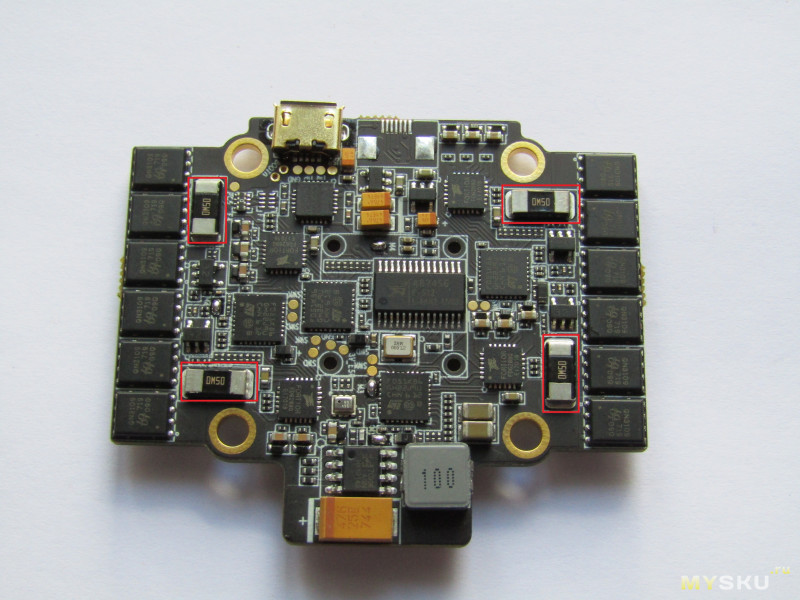
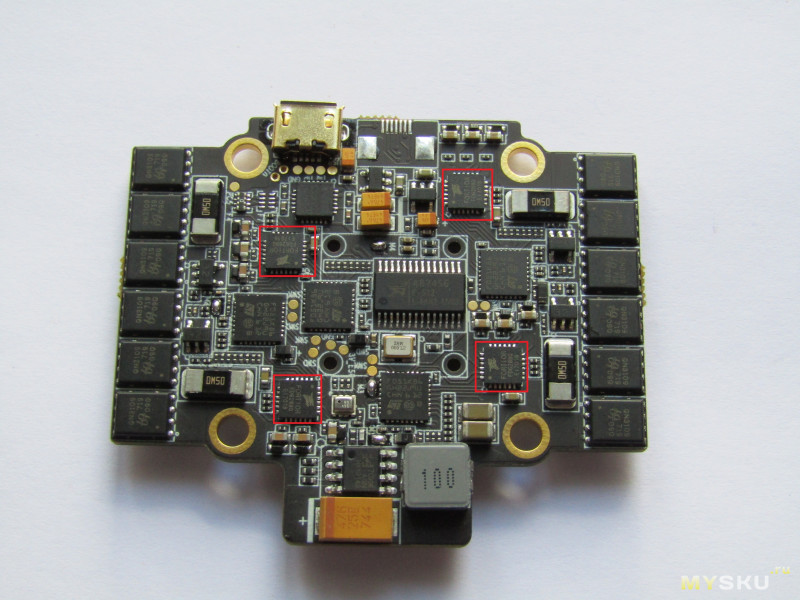
На обратной стороне находится у нас 4 датчика тока для каждого регулятора оборотов.
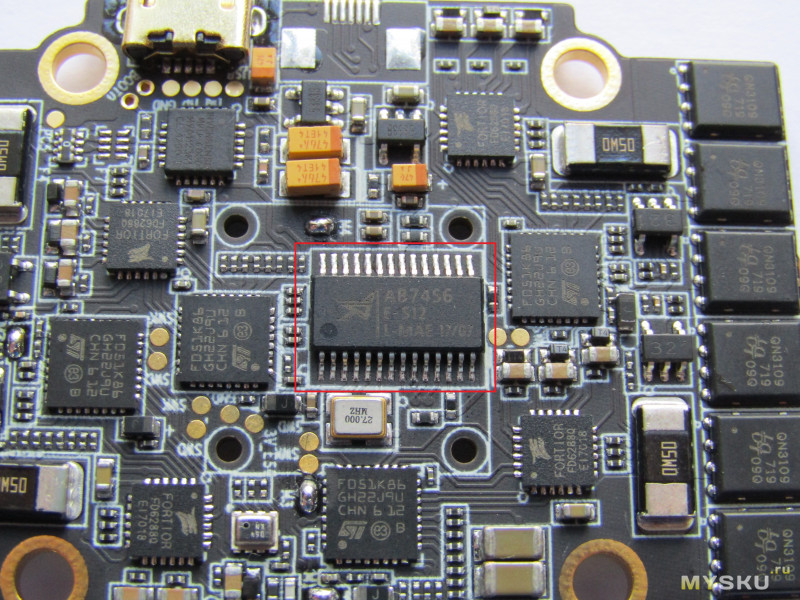
Чип ОСД AB7456.Данный чип имеет широкий диапазон рабочего напряжения так, что можно не бояться что ОСД пропадёт в полёте.
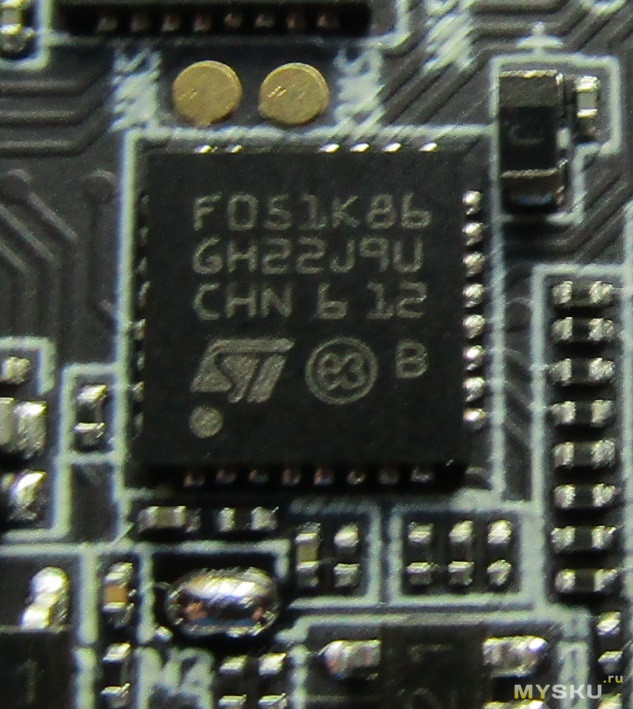
4 32-х битных процессора регуляторов F051k86
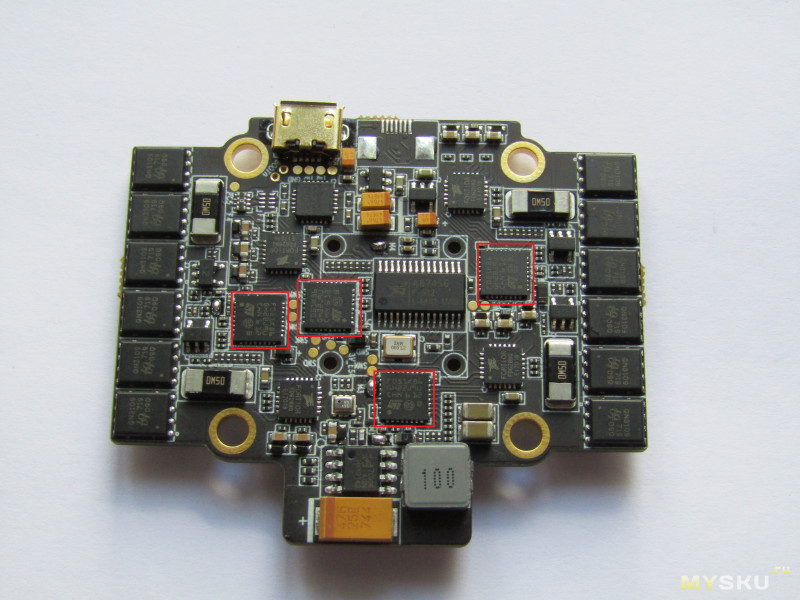
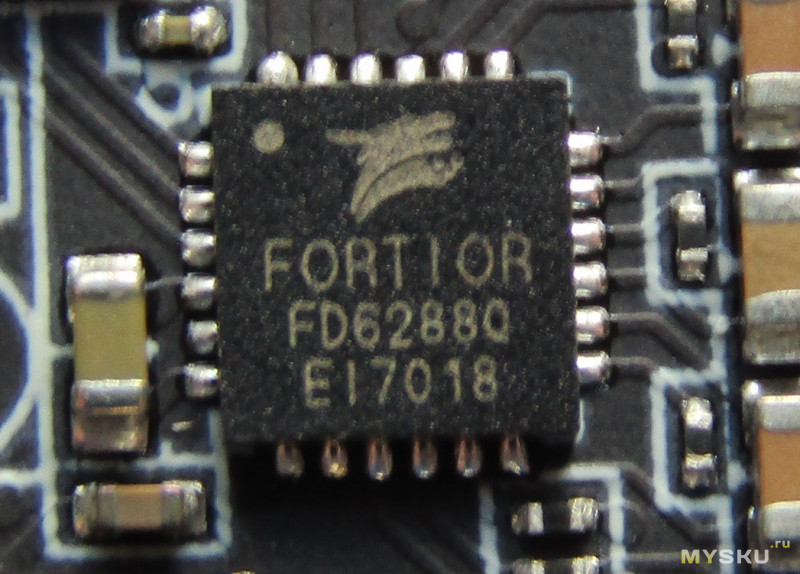
4 драйвера регуляторов FORTIOR fd6288q
Из интересного присутствует барометр BMP280
Теперь я хотел бы поговорить немного о возможных изменениях которые скоро могут произойти и были мною замечены.Дабы не засорять обзор, кому интересно прошу под спойлер.

Как бонус пара фотографий с разных сторон.Можете оценить качество и сделать для себя свои выводы.
Пара фоток процесса
Пара важных дополнений!
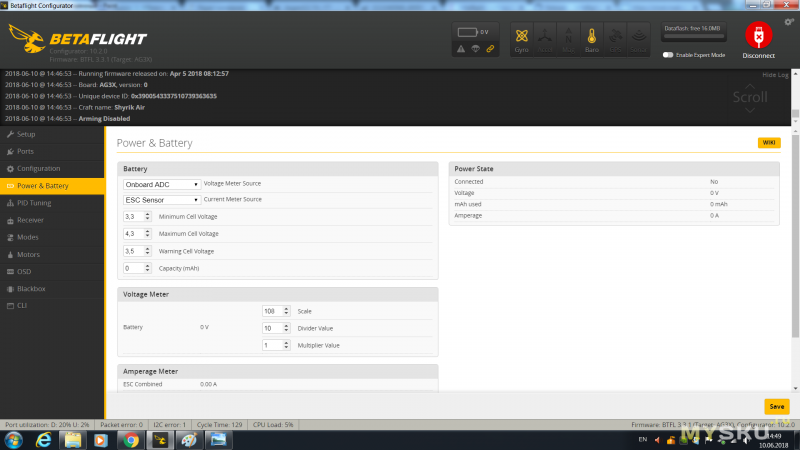
1) Конденсатор я напаял так как, установил камеру Runcam Split 2.Так как она питается напрямую от аккумулятора, то для уменьшения скачков напряжения я поставил кондёр.
2)На плате имеются два пятака с выводом 5в.И на 1 пятаке напряжение 5.01в, а вот на втором напряжение уже 4.67в.Для кого-то это может стать критично, а кому-то всё равно.Так как я использую аппаратуру Radiolink AT9, у неё рекомендуемое напряжение питание приёмника 5в.
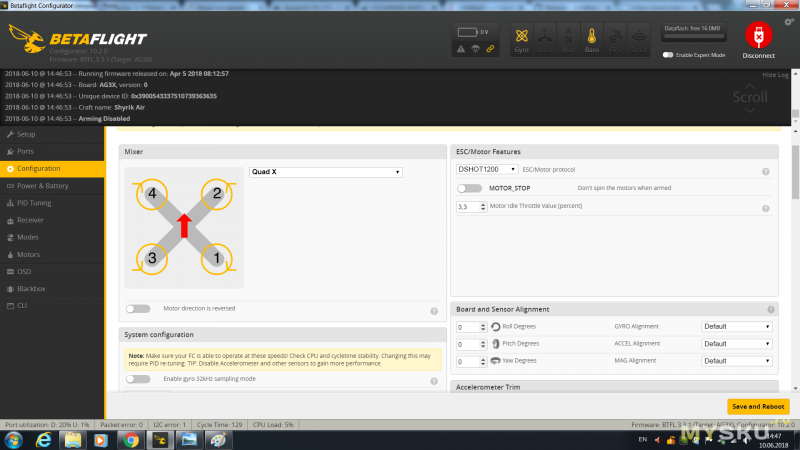
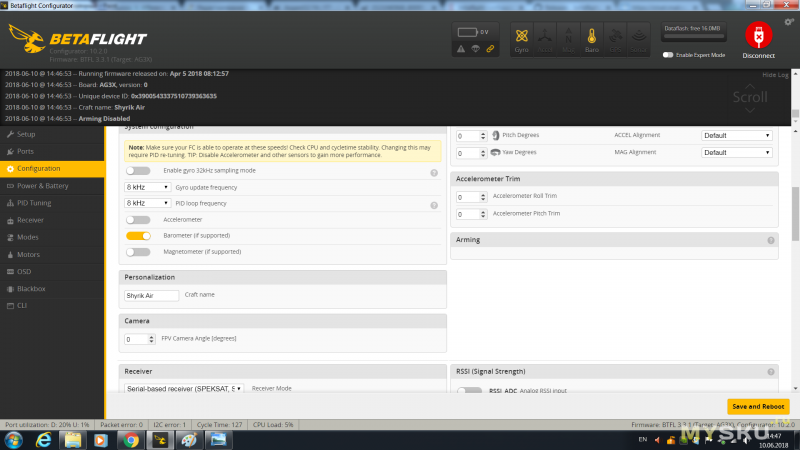
Из рекомендуемого, я бы всем посоветовал выставить протокол работы регуляторов dshot1200 и частоту обновления гироскопа и пид контроллера 8/8.
Если вы гонитесь за весом то пожалуй это лучшее решение на рынке.
Из минусов я заметил пожалуй один: это то что на одном пяточке мозг не выдаёт ровные 5в.
Спасибо всем кто дочитал!
А вот и видео как летает данный зверь:
Перед обзором хочу сказать что Asgard32 находится в публичном тестировании вследствие чего в будущем возможны некие изменения(которые уже были замечены, но о всём по порядку.)
Уверен у 99% людей в голове возник вопрос, а что же такое собственно Asgard? Постараюсь в кратце ответить на этот вопрос.
Asgard это мозг для квадрокоптера совмещенный с 4 регуляторами оборотов для бесколлекторных двигателей.Всё это находится на одной плате что уменьшает количество пайки и даёт существенную экономию в весе.
Осмотр
Сначала краткие характеристики:-процессор F4
-гироскоп MPU6000 подключенный по шине spi(что даёт возможность увеличить частоту обновлений гироскопа до 8мгц)
-отверстия для крепления 30.5x30.5mm(стандартные)
-поддержка 3-4s lipo аккумуляторов
-5в бек на 2А
-наличие осд чипа
-барометр BMP280
-4 32-х битных регулятора оборотов
-6 юарт портов(на данные порты мы можем повесить различную переферию, к примеру gps, компас, управление камерой и т.д.)
Посылка пришла в картонной коробке, внутри был пакет с пупырками в котором лежал сам Asgard в антистатичном пакете.К упаковке претензий нет, риск поломки при транспортировке снижен к минимуму.
Плата и вся пайка выполнены на высоком уровне, всё чисто, отмыто от флюса.
Теперь предлагаю детально осмотреть сначала одну сторону платы, потом другую, сделать некие выводы и перейти к установке на квадрокоптер.
Центральный процессор у нас F405RGT6
Мосфеты используются QN3109.Я либо плохо разбираюсь в даташитах либо мосфеты и вправду рассчитаны на максимальный ток 150А!!! Если это правда, то шанс выхода из строя мосфета сводится просто к минимуму!
На входе стоят два больших танталовых конденсатора.Так же по бокам чуть выше стоят ещё 2 таких же конденсатора.По заявлению производителя использовать дополнительные конденсаторы не требуется.
Далее находятся пяточки для припаивания приёмника радиоуправления, видео передатчика, видео камеры, различных периферийных устройств.Так же очень удобно сделаны дополнительные выводы земли,5в и одна площадка напрямую соединена с + контактом батарейки(эти 3 площадки выполнены в форме прямоугольников)
Порадовала возможность подключение доп регуляторов и сделанные под них отдельные управляющие пяточки(1 фото)
Из интересного есть пяточёк для подключения датчика воздушной скорости но на кой он нам на гоночном квадрокоптере я без понятия, пятак есть я и показываю :) (2 фото)
На обратной стороне находится у нас 4 датчика тока для каждого регулятора оборотов.
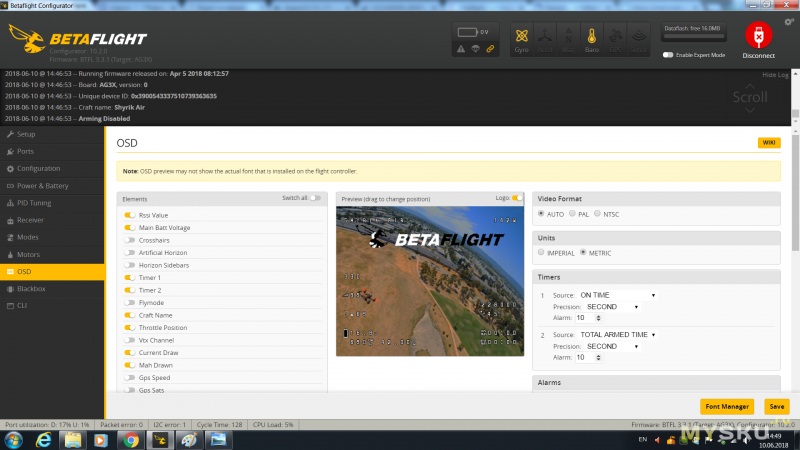
Чип ОСД AB7456.Данный чип имеет широкий диапазон рабочего напряжения так, что можно не бояться что ОСД пропадёт в полёте.
Что такое ОСД?
Смысл ОСД в том что видео сигнал проходит через чип ОСД и на изображение накладывается информация которая нужна пользователю(пользователь сам может настраивать какие данные требуется вывести).Проще говоря чип который накладывает телеметрию на видео сигнал.
4 32-х битных процессора регуляторов F051k86
Что такое 32-х битные регуляторы?
Blhelli это прошивка непосредственно для самих регуляторов оборотов.Предыдущая версия называлась Blhelli_s, работала с 8 битными процессорами и была написана на ассемблере.Blhelli32 работает уже с процессорами 32 бита и написана на языке С(си).
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов.Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты.Но это на словах, реально подтвердить или опровергнуть пока что я не могу.Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов.
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов.Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты.Но это на словах, реально подтвердить или опровергнуть пока что я не могу.Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов.
4 драйвера регуляторов FORTIOR fd6288q
Из интересного присутствует барометр BMP280
Теперь я хотел бы поговорить немного о возможных изменениях которые скоро могут произойти и были мною замечены.Дабы не засорять обзор, кому интересно прошу под спойлер.
Возможные изменения
Из замеченных мною возможных изменений это пожалуй только появление высокоскоростного гироскопа.Так как высокочастотные гироскопы устанавливаются в силиконовых боксах над процессором, то вокруг процессора должны быть отверстия для крепления этого бокса.А у асгарда они уже есть. 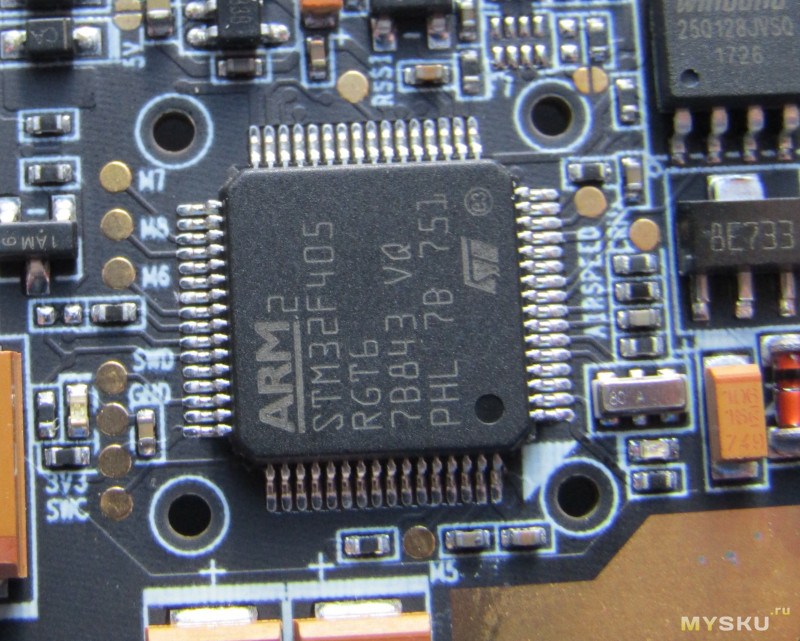 А ещё внимание приковывает нераспаяный разъём.К такому разъёму обычно подключается шлейф гироскопа, так что уверен скоро возможно будет приобрести данный мозг с высокочастотным гироскопом.
А ещё внимание приковывает нераспаяный разъём.К такому разъёму обычно подключается шлейф гироскопа, так что уверен скоро возможно будет приобрести данный мозг с высокочастотным гироскопом. 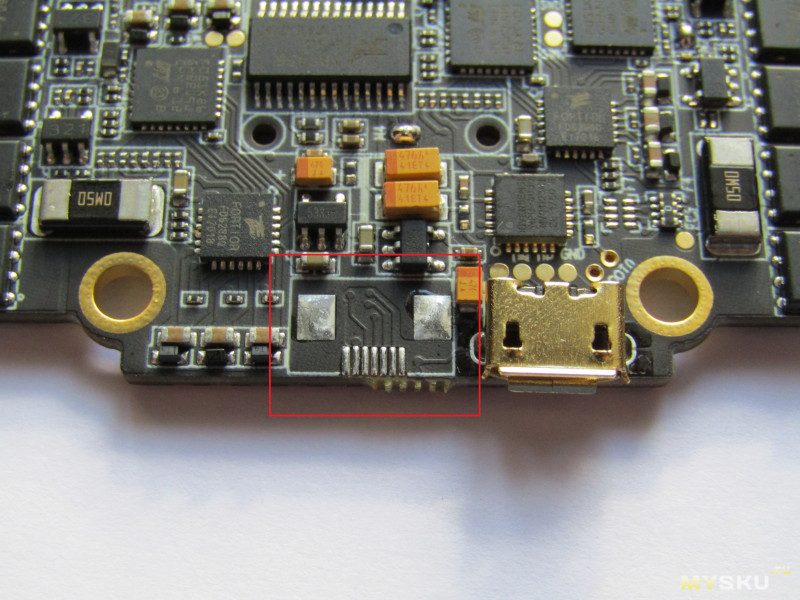 Хочется вставить пару слов об ещё одной вещи.В процессе написания обзора на странице магазина появилась возможность выбрать процессор F7 вместо F4, но на практике под F7 софт почти не оптимизирован и смысла в нём мало.
Хочется вставить пару слов об ещё одной вещи.В процессе написания обзора на странице магазина появилась возможность выбрать процессор F7 вместо F4, но на практике под F7 софт почти не оптимизирован и смысла в нём мало.
А ещё внимание приковывает нераспаяный разъём.К такому разъёму обычно подключается шлейф гироскопа, так что уверен скоро возможно будет приобрести данный мозг с высокочастотным гироскопом. Хочется вставить пару слов об ещё одной вещи.В процессе написания обзора на странице магазина появилась возможность выбрать процессор F7 вместо F4, но на практике под F7 софт почти не оптимизирован и смысла в нём мало.Дорожки
Как показала практика, а отлетал я прилично и пару раз хорошо приложил об землю квадрокоптер, дорожки не горят и всё максимально надёжно, проблем нету.Под спойлером приложу несколько фотографий кому интересно.Фото дорожек
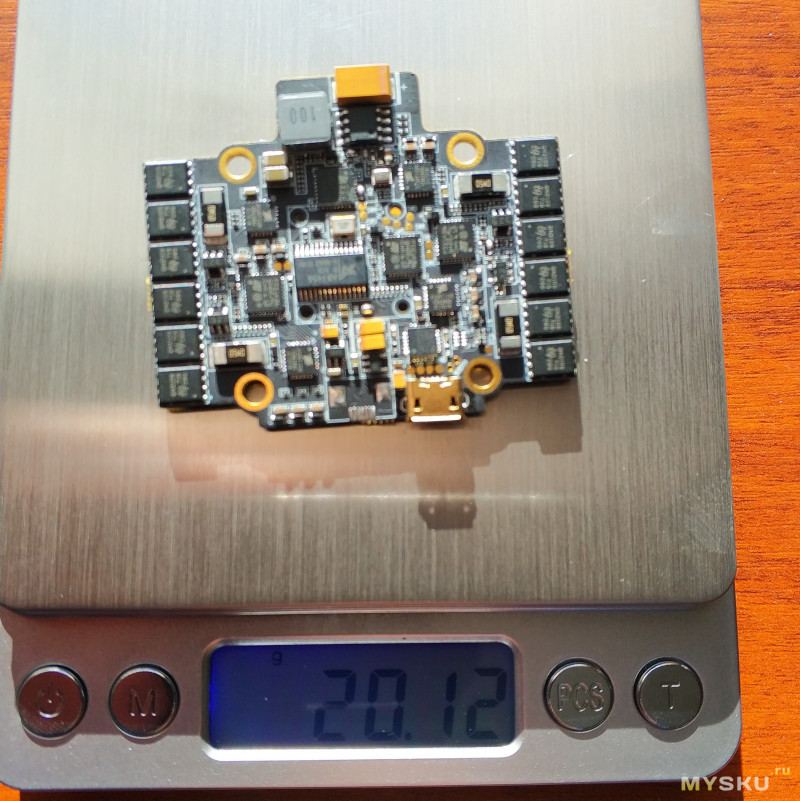
Вес
Для такого функционала вес в 20 грамм это фантастика.Как бонус пара фотографий с разных сторон.Можете оценить качество и сделать для себя свои выводы.
Инструкция
В инструкции ничего интересного особо нету, кому интересно могут скачать её и посмотреть.Сборка
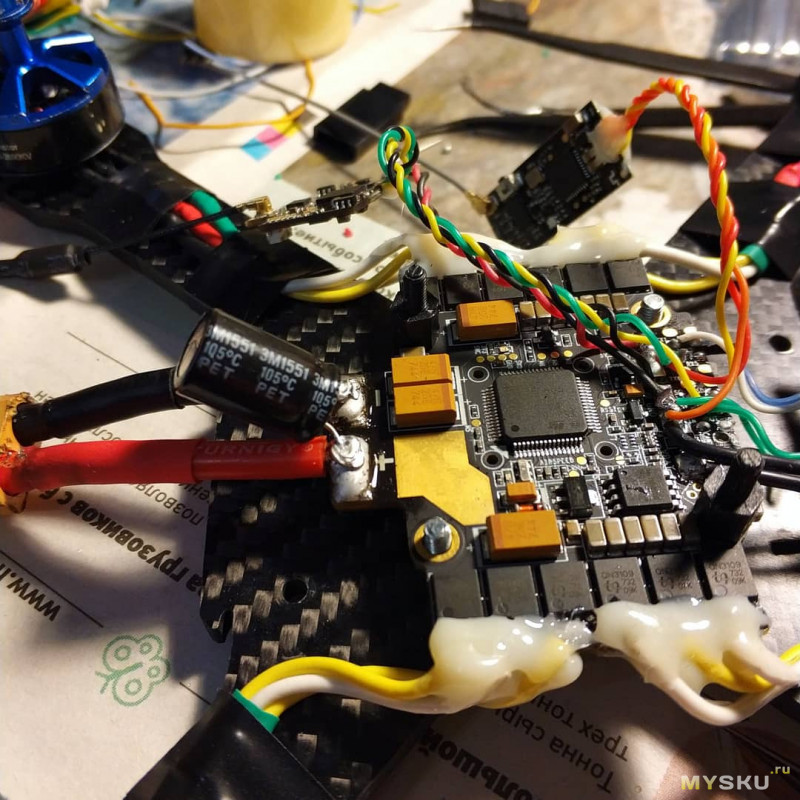
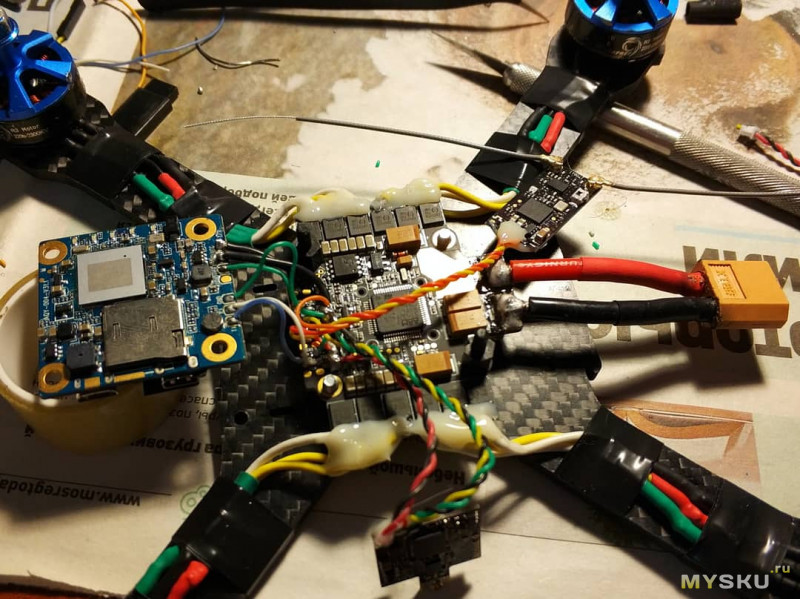
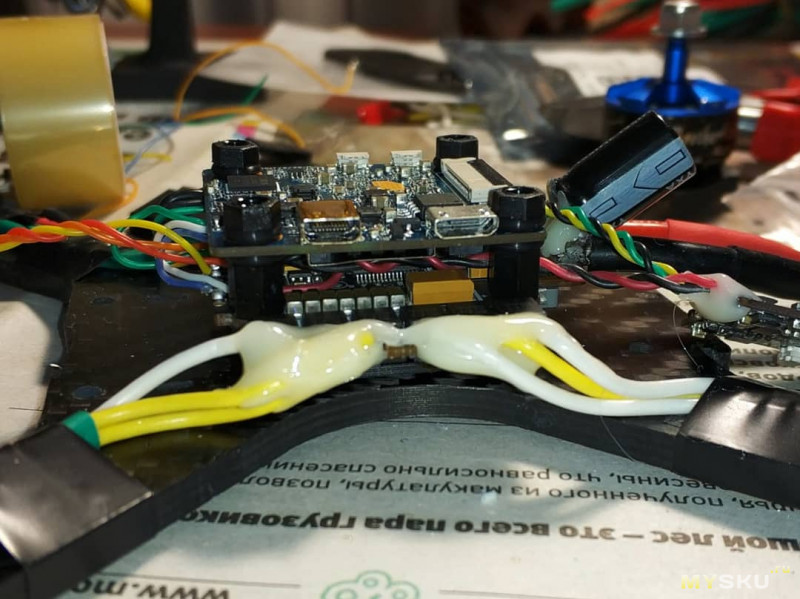
По сборке ничего трудного нету.Надо припаять моторы, приёмник радиоуправления, камеру и видео передатчик.И можно лететь :)Пара фоток процесса
Пара важных дополнений!
1) Конденсатор я напаял так как, установил камеру Runcam Split 2.Так как она питается напрямую от аккумулятора, то для уменьшения скачков напряжения я поставил кондёр.
2)На плате имеются два пятака с выводом 5в.И на 1 пятаке напряжение 5.01в, а вот на втором напряжение уже 4.67в.Для кого-то это может стать критично, а кому-то всё равно.Так как я использую аппаратуру Radiolink AT9, у неё рекомендуемое напряжение питание приёмника 5в.
Прошивка
Как прошить?
Для начала нам нужен Betaflight configurator.
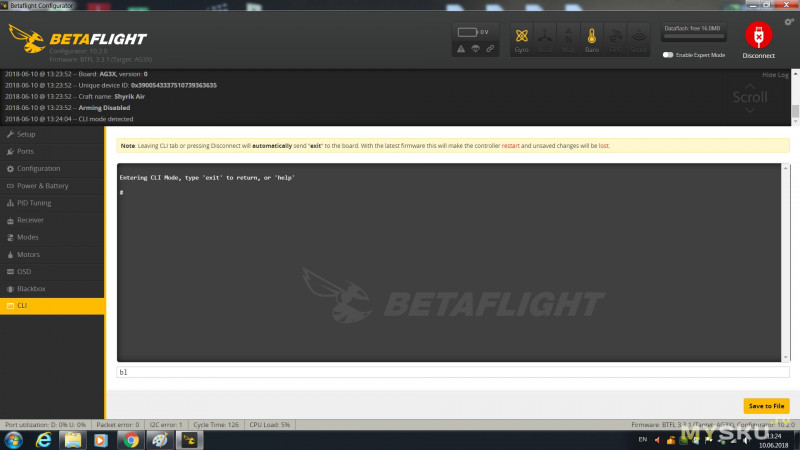
Потом подключаем асград к компьютеру, подключаемся и переходим во вкладку cli.В неё надо написать bl и нажать enter.После этого мозг перейдёт в режим прошивки.
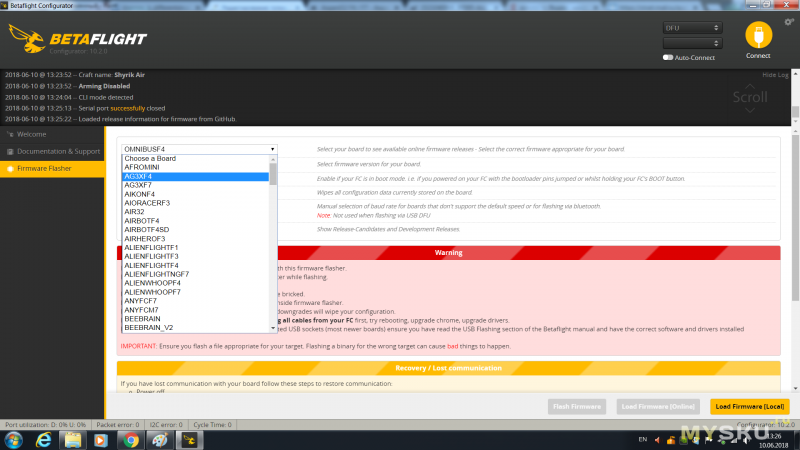
Идём во вкладку firmware flasher.
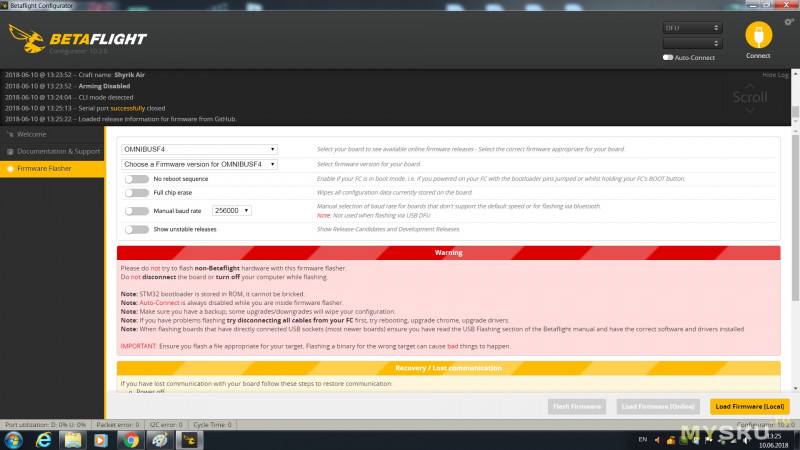
Из списка надо выбрать прошивку для AG3XF4
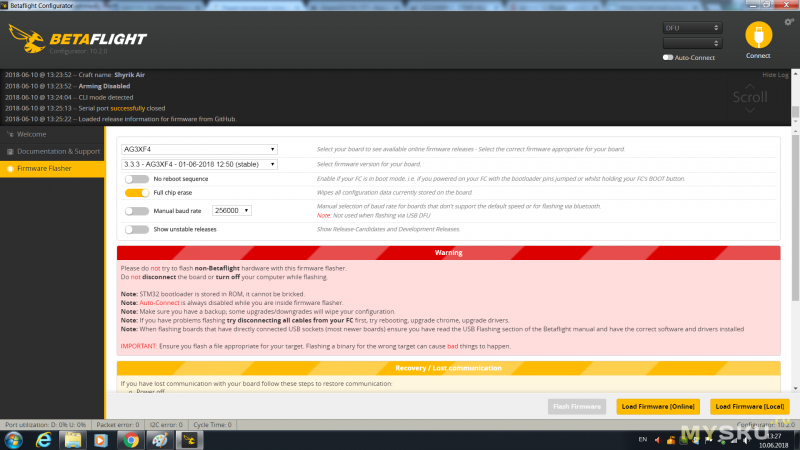
В пункте ниже выбираем версию прошивки.На данный момент доступно только 3.3.3, её и выбираем.Ставим галочку на full chip erase и нажимаем на load firmware online
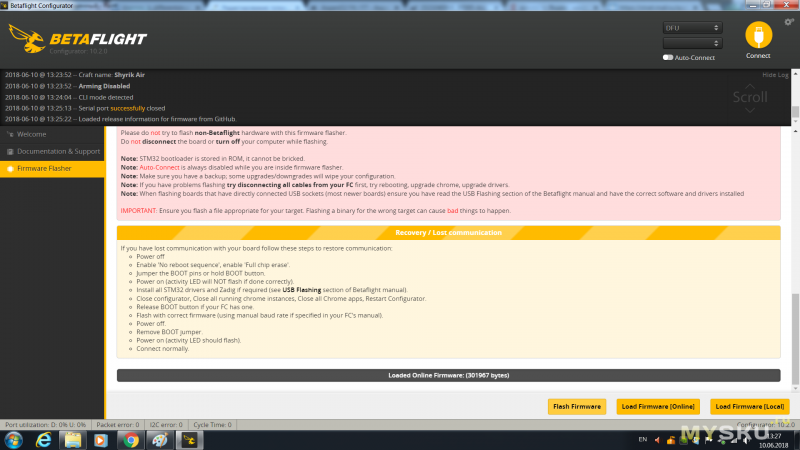
После того как прошивка скачалась, жмём flash firmware и всё, мозг прошит.
Потом подключаем асград к компьютеру, подключаемся и переходим во вкладку cli.В неё надо написать bl и нажать enter.После этого мозг перейдёт в режим прошивки.
Идём во вкладку firmware flasher.
Из списка надо выбрать прошивку для AG3XF4
В пункте ниже выбираем версию прошивки.На данный момент доступно только 3.3.3, её и выбираем.Ставим галочку на full chip erase и нажимаем на load firmware online
После того как прошивка скачалась, жмём flash firmware и всё, мозг прошит.
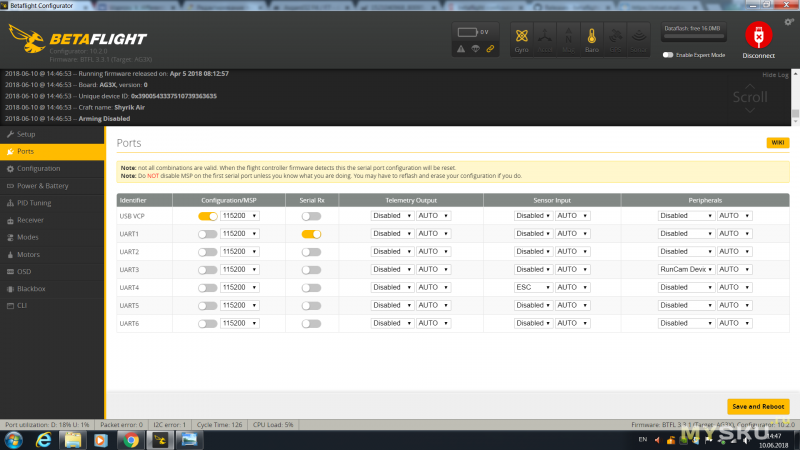
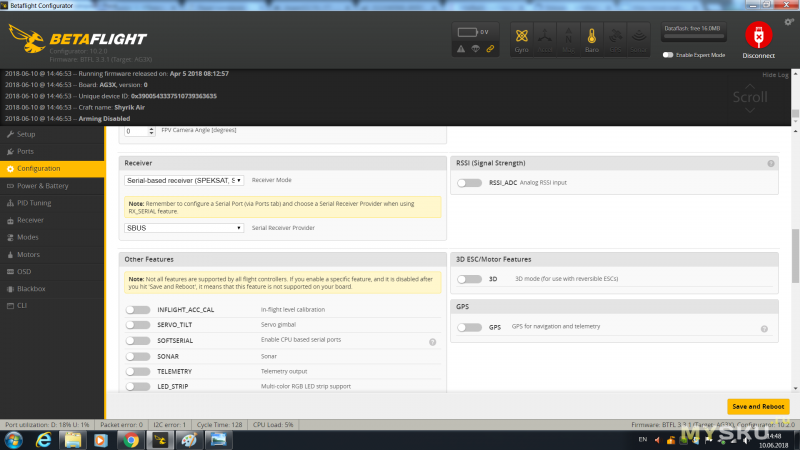
Настройка
Что касаемо настройки, то это очень индивидуальная вещь по моему мнению.Под спойлером я выложу свои настройки.В принципе вы можете их взять, но если у вас приёмник так же подключен, как и у меня к мозгу по протоколу sbus.Из рекомендуемого, я бы всем посоветовал выставить протокол работы регуляторов dshot1200 и частоту обновления гироскопа и пид контроллера 8/8.
Мои настройки
Впечатления и вывод
В целом Асград вышел отличным мозгом.Гироскоп mpu6000 очень не требователен к вибрациям, и именно благодаря ему с полётом квадрокоптера не возникло ни каких проблем.Пайки в мозге минимум, собран качественно.Если вы гонитесь за весом то пожалуй это лучшее решение на рынке.
Из минусов я заметил пожалуй один: это то что на одном пяточке мозг не выдаёт ровные 5в.
Спасибо всем кто дочитал!
А вот и видео как летает данный зверь:
Самые обсуждаемые обзоры
| +142 |
3687
147
|
| +41 |
2684
44
|
| +8 |
183
3
|
| +35 |
1701
25
|
Всегда умиляют любители повыёживаться. Ведь нельзя просто сказать, «там ошибка, „пятоки“ надо писать через А». Нет, надо выпячить высокомерие, чтоб ничего другого видно не было. Грустно и смешно.
очень мило
Посмотрел видео, никогда не задумывался о покупке квадрокоптера, а щас прям запал.
У людей, тесно занимающихся радиоэлектроникой, «пятаки» — жаргонное слово.
Открыл даташит на этот гироскоп (на самом деле это целый обработчик движений с тремя гироскопами, тремя акселерометрами, программируемыми фильтрами и программируемым цифровым обработчиком):
— макс. частота обновления значений гироскопов — 8 кГц
— макс. частота обновления значений акселерометров — 1 кГц
— макс. частота шины SPI для чтения значений датчиков и регистра прерываний — 20 МГц
— макс. частота шины SPI для чтения-записи других регистров — 1 МГц
То есть если бы она висели на огромном радиаторе, то да, с них можно было бы получить заявленные амперы, а так как они стоят без радиатора на маленькой плате (и друг друга греют) то и максимальный довловременный ток получается сильно меньше заявленного.
Лично от себя.Отлетал 1,5 месяца на такой платке, были серьезные падения.Пока что ничего не сгорело.
Вот что есть.Не закреплены только антены.
Моторы стоковые, не перемотанные?
В даташите указаны и температурные ограничения и ограничения по напряжению, при которых мосфеты пропускают 150А. Если вы их будите хорошо охлаждать и соблюдать другие параметры, то можно и 150А использовать. Но, как я посмотрю, тут нету радиаторов и охлаждение пассивное. Так что при определенных условия выход из строя возможен.
P.S. Если я правильно понимаю даташит, то они держат 150А, если используется активное охлаждение и температура корпуса не превышает 25С. С более слабым охлаждением, при котором температура корпуса доходит до 100С, максимальный ток составляет 97А. А без радиаторов вообще только 20-30А, все зависит от температуры воздуха и от скорости естественного воздушного потока.
Раньше за $5+ проавался, сейчас уже за $1. Его впаривали даже чтобы напряжение до 5В измерять, ROLF.
PPM вход совмещен с UART или можно его использовать отдельно?
Какой максимальный ток возможен по шинам 5V и 4.6V?
И зачем они MPU-6000 поставили?
Слабоват он для шустрого квадрокоптера.
Sbus можно повесить на любой uart если нету проблем с инвертированным сигналом с приемника.
На счёт ppm без понятия.Очень давно не встречал людей летающих на ppm.
5в шина и 4,6в шина совмещены.Просто где то падает напряжение пока доходит то площадки под пайку.Максимальный ток 2A, рекомендуемый 1А.
MPU-6000 по-моему отличная Гира.Все равно ещё нету полностью стабильной прошивки что бы можно было летать на частотах 32/32.И так как видно место под распайку шлейфа под другую гиру, можно сказать что скоро появится вариант и с более густой гирой.
И ещё один плюс в сторону mpu6000, она не так требовательна к вибрация, значит можно меньше парится над виброразвязками.
Дело в том, что реально нужно использовать OSD + компас + GPS + телеметрийный модем + SBUS приемник + SmartPort телеметрийный выход с контроллера. Последние четыре устройства требуют каждое по отдельному UART порту, а компас требует i2c. Полетный контроллер типа Omnibus F4 Pro V2 такое не позволяет — даже при задействовании soft uart, по uart'ам можно подключить только 3 устройства.
На счёт шины i2c я без понятия, возможно она там есть, а возможно и нет( к сожалению не могу точно ответить.
На счёт шины i2c я без понятия, возможно она там есть, а возможно и нет( к сожалению не могу точно ответить.
Если посмотреть инструкцию то возможно на uart3 как раз эта шина находится.По другому расшифровать не могу инструкцию :)
Я заново внимательно посмотрел плату и не нашел там UART2 и UART4.
Их нет. Всего доступны 4 uart'а (если используется i2c, то 3).
Это вполне согласуется с тем, что у stm32f4* контроллеров 4 uart по даташиту.
Странно, что Бетафлайт Конфигуратор показывает 6 на вкладке Serial.
UART4 вроде бы подсоединен к датчикам тока регуляторов внутри платы, а вот куда делся UART2 неясно.
Жаль, мне бы он как раз был бы нужен.
Благодарю за то что объяснили.
Может получиться что данные с датчиков не будут доходить, с одного или всех, т.к. они не разрабатывались для параллельного подключения могут напряжения не перетягивать, в этом случае скорее всего можно будет скорректировать резисторами.
как вы на такой скорости управлять умудряетесь в полете ))?
сколько часов налётано если не секрет?
На скорости на самом деле когда управляешь то довольно легко, привыкаешь и становится просто.
По поводу налета.Авиамоделями(р/у самолётами) занимаюсь 7 лет.Квадрокоптерами занимаюсь 1,6 года всего.
А так меня завлекает скорость, люблю погонять по трассе, адреналина хорошую порцию получить можно :)
Моторы brotherhobby R3 2206 2300kv
Камера стоит runcam split 2.Можно взять в принципе любую, от себя рекомендую с матрицей ccd.(foxer hs1177 или runcam swift 1/2)
Видео передатчики akk nano 2.Можно брать в принципе любой но лучше что б была возможность переключать мощность и была сетка частотная raceband.
Батарея 1300mah 4s от 65с брать.Лично я летаю на dinogy 1300 65c/75c 4s и на onbo 1300mah 90c 4s.
А что стоит на приеме сигнала от akk nano 2?
Я так понимаю, что runcam split 2 дает ещё и ТВ выход, так что его можно задействовать для FPV?
Если не смотреть на деньги, то onbo лучше dinogy?
Дайте пожалуйста ссылку(имя) на пропеллеры, которые вы используете со своими моторами.
Спасибо!
На приеме сигнала от akk nano 2 стоит комплектная диполь антена.
Вы правильно поняли, у runcam split 2 есть специальный тв выход где обеспечена минимальная задержка. НО! Если вы собираете первый коптерах я вам ее не рекомендую, лучше купить простую курсовую камеру с ccd матрицей.
Честно что лучше фиг его знает, спор этот вечный уже :) я бы свой голос отдал за dinogy ultra graphene, но они стоят прилично.
Пропеллеры стоят HQ 5048x3
air-hobby.ru/katalog/product/2197-propelleri-hqprop-dp5x48x3-krasnie-2-pari.html
Камеру уже заказал, хех. Да, это первый самосбор, но не первый коптер. На пластиковом JJRC уже налетал 100 часов.
Хотел уточнить, на приеме FPV какие железки стоят? Приемный диполь и дальше интересно? Какой приемник, на чём смотрите?
Немного не понимаю на счёт приема, стоит видео приемник, антена у него простой диполь.
Приемник стоит Radiolink R12DSM. Сам летаю на Radiolink AT9.
Видео принимаю на шлем Eachine VR D2.
Ещё один дурацкий вопрос, вижу в продаже радиоаппаратуру Radiolink AT9S и без S в конце. Что навскидку лучше взять?
Я свой радиолинк брал давно, и тогда был доступен только AT9.
Если по просто то у AT9S более новый алгоритм помехоустойчивости, и сигнал лучше стал по сравнению с AT9.
под хексу есть F3 EVO вариант
Набор проводов — 30+ проводов с обжатыми наконечниками и пластиковые разъемы с разным кол-вом дырок.
Поднял инвойс — там всё написано хитро:
Item
Asgard32 F4 / F7
Accessory
+ cable sets
SKU
80095-80004
Quantity
1
Считаете стоит бодаться с ними? Или пытаться приспособиться к новой плате?
Считайте вам крупно повезло!
Так как гира mpu 6000 максимальные частоты вы поставите 8/8. А F7 во много производительнее и уже достаточно хорошо оптимизирован. Так что вы за ту же цену получили проц во много раз мощнее!)
Мое мнение бодаться вообще не стоит :) А на счёт приспособлений. Так прикол в том что всё так же подключется и ни какой разницы нету по сравнению с F4. Наоборот у вас плюс в том что более производительный процессор достался!
Херня какая-то.
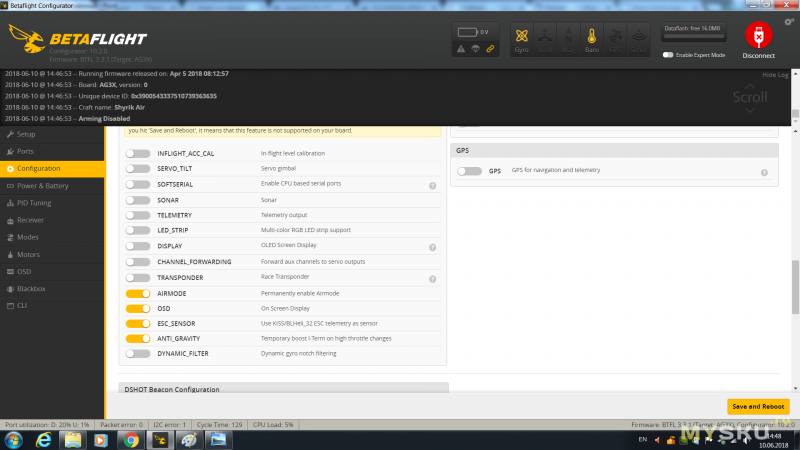
Плюс ко всему отключение акселерометра даёт возможность армить квадракоптер в любом положении (полезно когда застрял в дереве) и уменьшает нагрузку на процессор.
Развернул моторы, так чтобы они соответствовали картинке и перед в направлении разъема питания но не уверен, что правильно поставил гироскоп. Подскажи пожалуйста, если я смотрю в зад коптера и заваливаю его налево, то какая ось и в какую сторону от нуля должна изменяться? А когда я заваливаю нос вниз, то какая ось и в какую сторону от нуля должна изменяться?
Спасибо!
Как я понял вы в горизонтальной плоскости повернули полётный контроллер. Если так, то вы должны изменить значения оси yaw.
Попробуйте значения ±90 или ±180.
Относительно осей, вы смотрите только на горизонтальную ось и должны добиться такого что смотря сзади на квадракоптер и поворачивая его на лево, в конфигураторе картинка тоже должна повернуться на лево(как бы повторить движение вашего полётного контроллера).
Ну я ж погуглил, и нашел как переназначить ресурсы, ну и силой переназначил так, чтобы перед был вот так:
Сфазировал моторы, так чтобы крутились как на картинке выше. Прицепил соответствующие пропеллеры на каждый из моторов.
При включении акселерометра — у меня модель в бетафлайт двигается в соответствии с движениями реальными.
Но при включении на минимальном газу — моментально об стенку влево с огромной силой. Благо батарея ещё не долетая до стенки отцепилась, ибо ещё не пришел XT60 male.
А в настройках там отдельно задется угол для гиро и отдельно для акселерометра. Вот я и прошу, дабы разобраться с настройкой гиры. Если 1. крутнуть левый борт вниз, 2. завалить нос вниз, то какая из осей гиры пойдет и куда — в плюс или в минус
Вот настройки выравнивания платы и сенсоров.
Правую часть стоит трогать в том случае, если сенсоры выносные. Если сенсоры на плате, как в случае асгарда, то вместо этого правим Roll, Pitch, Yaw.
В моем случае(плата F7 на прошивке 3.4.х), я моторы сдвинул на 90 градусов, а Yaw — пришлось на 180. Почему так? Ума не приложу, но теперь летает отлично и не срывается с места в стену слева. Я счастлив! Спасибо автору поста!!!
Теперь оси:
и