Регулятор оборотов для бесколлекторных моторов Typhoon32 V2. Или работа над ошибками.
- Цена: $59.99
- Перейти в магазин
Сегодня посмотрим на обновлённую версию регулятора оборотов для бесколлекторных моторов Typhoon32 V2 и оценим работу проведённую компанией Airbot по исправлению своих ошибок.
Вкратце про прошлую версию.Из-за тонких дорожек на плате, происходил перегрев их и как следствие возгорание, и выход платы из строя подробнее можно узнать тут
Краткие характеристики V2:
— Питание (LiPo) 3-6s
— Поддержка всех протоколов (Оnehot / Multishot / Dshot / PWM)
— 32-х битная прошивка (BLHELI32)
— Поддержка полной телеметрии
— Монтажные отверстия 30.5x30.5mm
— Рабочий ток каждого регулятора 35А
Улучшения:
— Полностью переработана плата
— Добавление конденсаторов
— Перекомпоновка элементов на плате

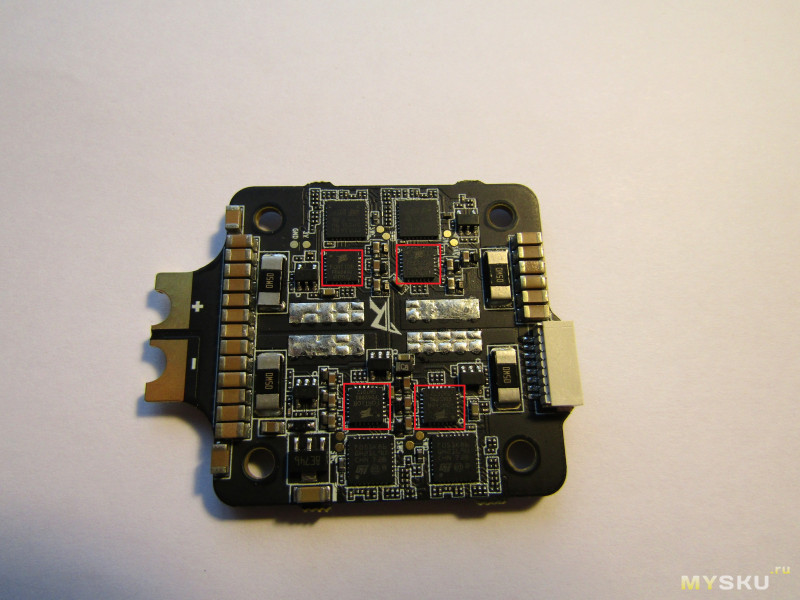
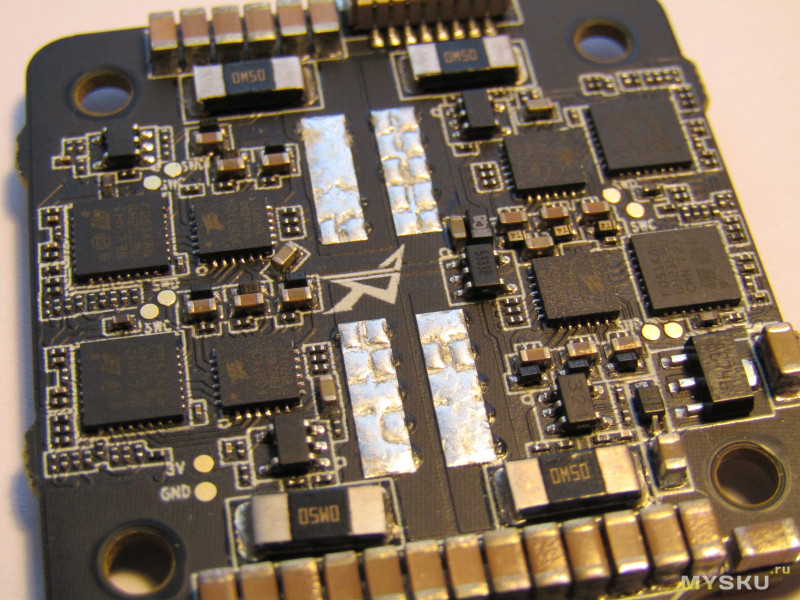
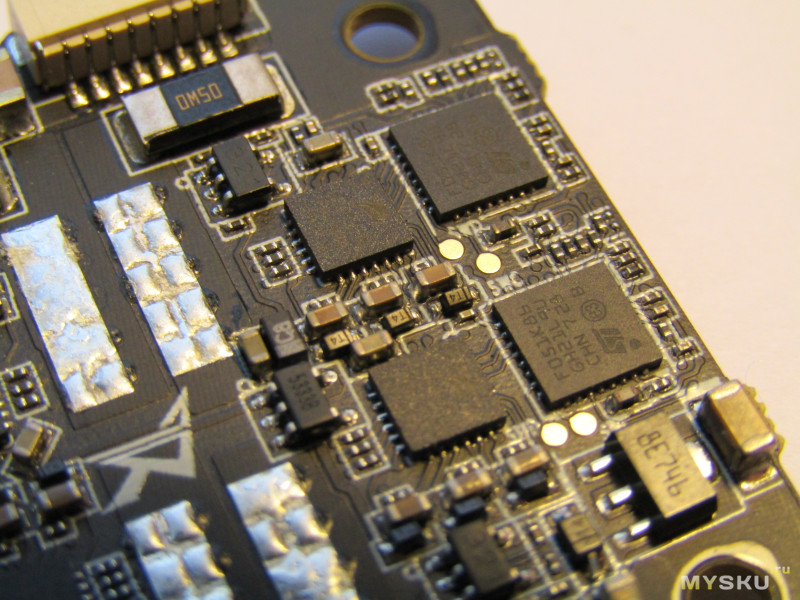
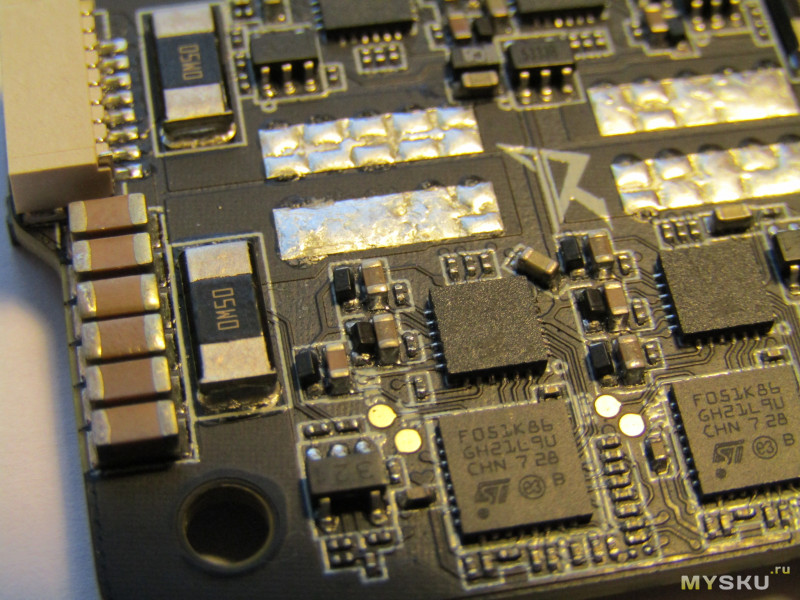
Осмотрим сначала нижнюю сторону платы.Как видно пайка хорошая, для каждого регулятора присутствует свой индивидуальный датчик тока(с которого мы можем получать данные).Так же в глаза бросается большое количество конденсаторов, по заявлению производителя их напаяно достаточно, так что установка доп. конденсаторов не нужна.
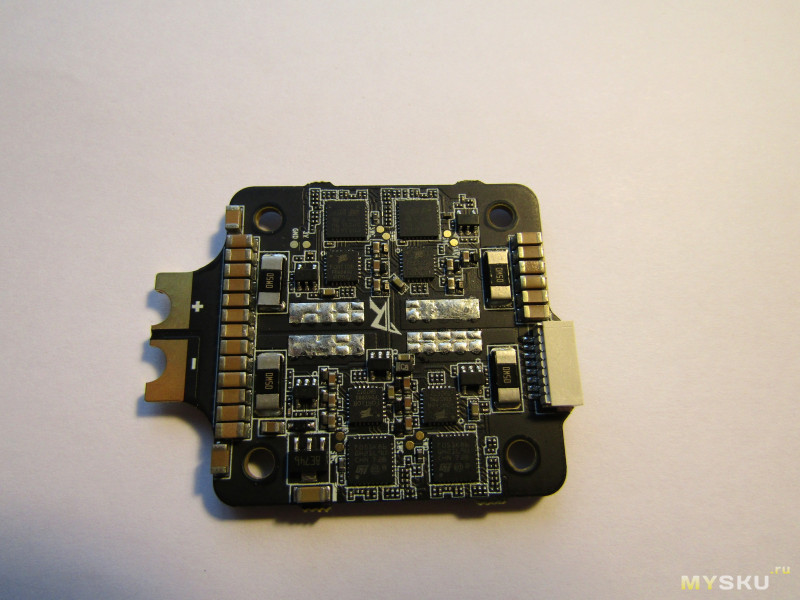
Странное и спорное решение насчёт оголённых участков платы.Зачем сделано не понятно, но опустим это.
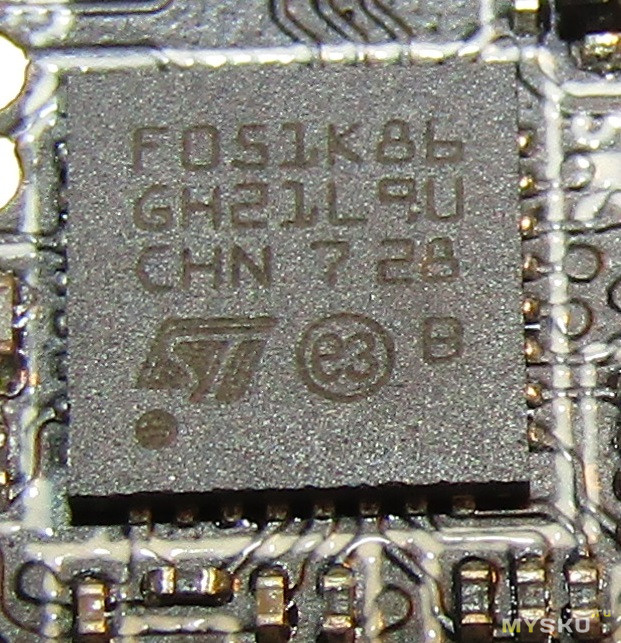
Видим 4 32-х битных STM процессора на плате.
Маркировка — f051k86
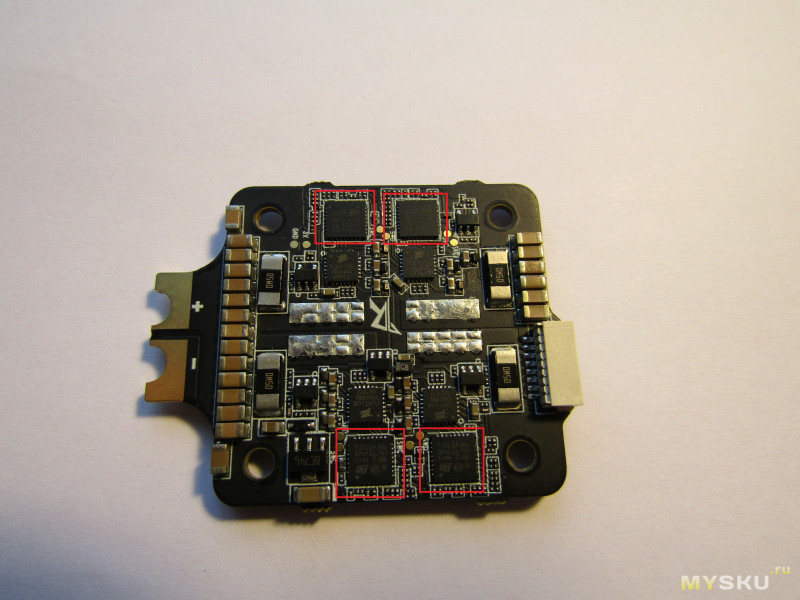
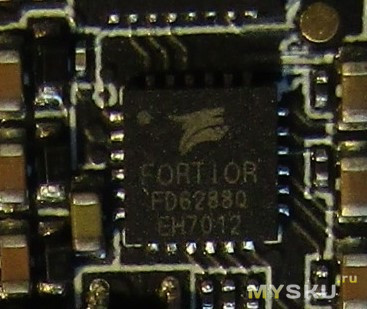
Потом идут 4 драйвера ключей.
Маркировка — fortior fd6288q
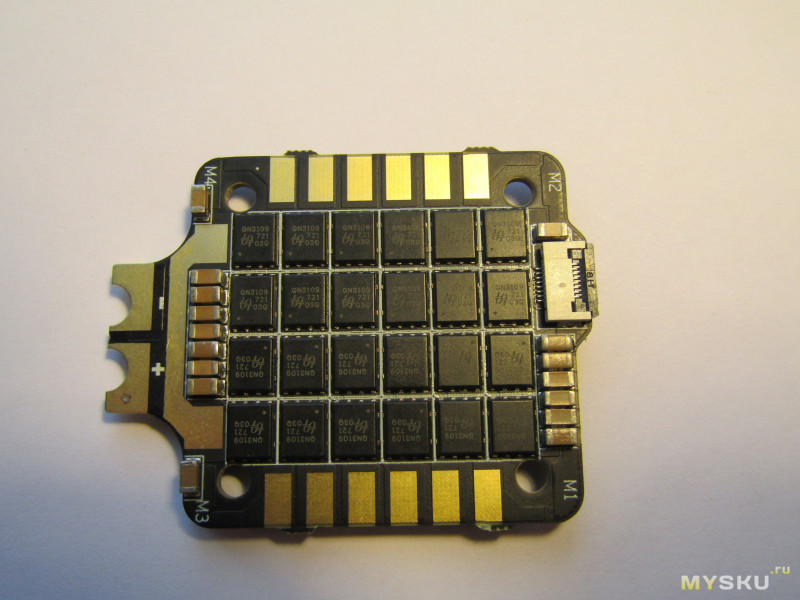
Перевернём плату и осмотрим другую её сторону.
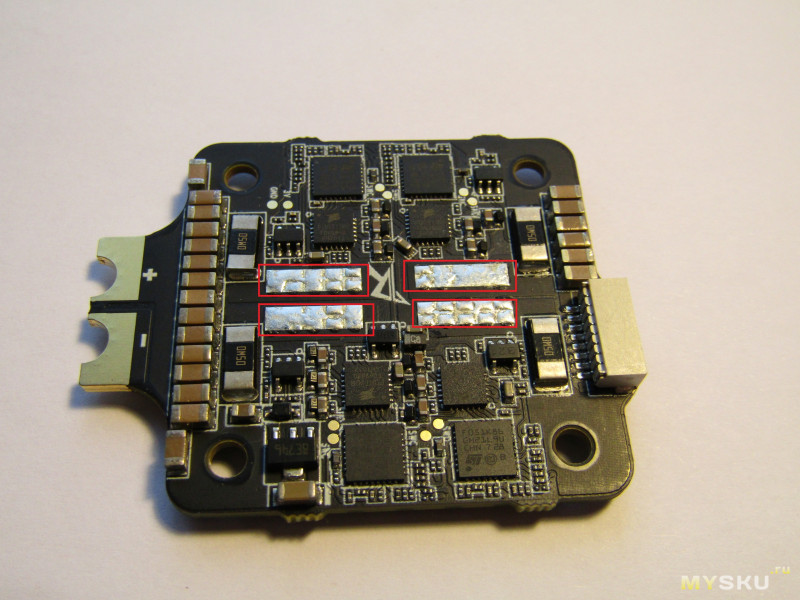
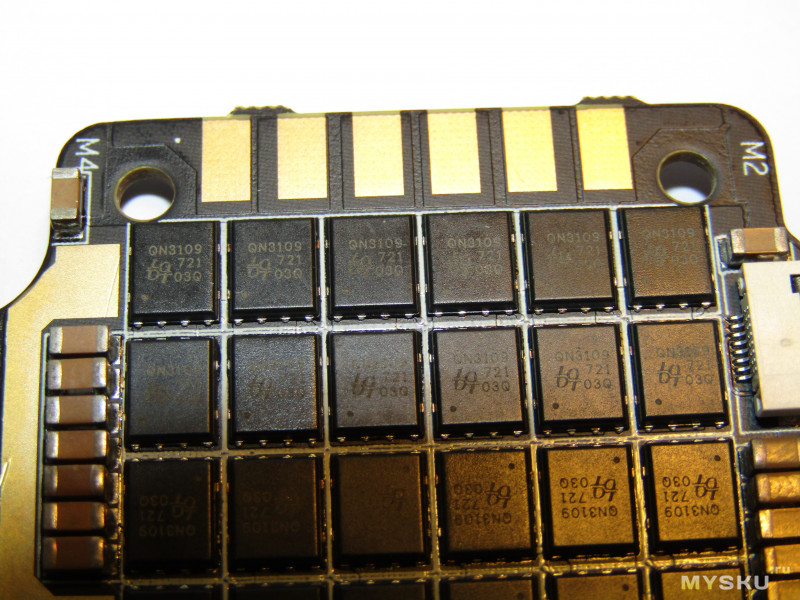
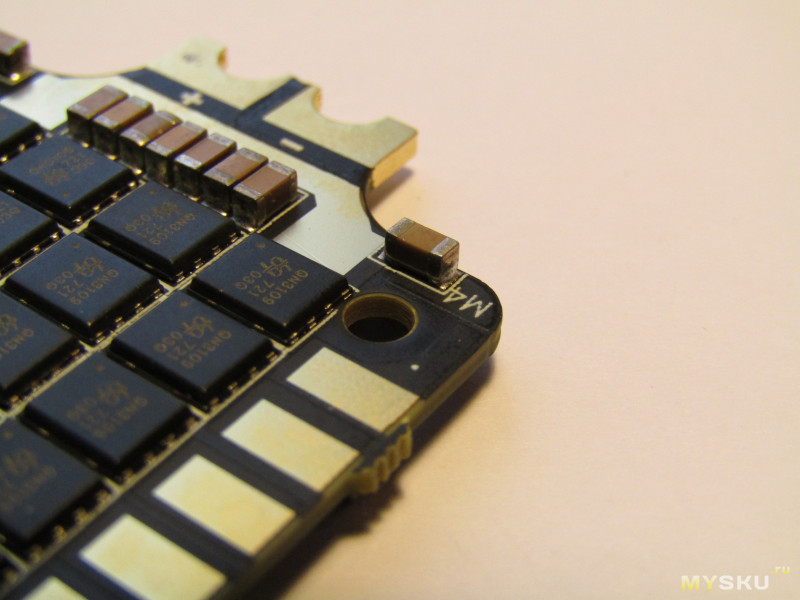
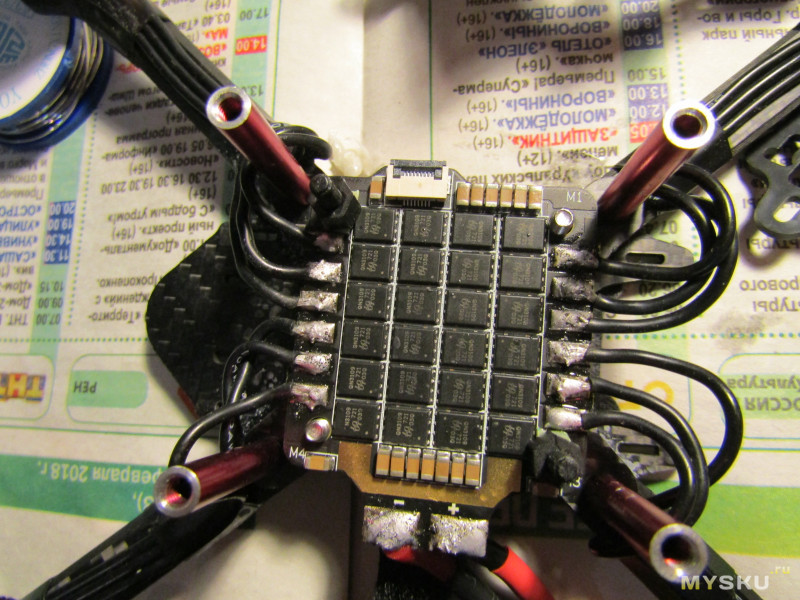
Как видно все мосфеты собраны в одно место.Моё мнение это только лучше так как минимум дорожек надо вести по плате, выглядит эстетичнее, больше места стало непосредственно для вывода дорожек к которым будут подпаиваться провода моторов.
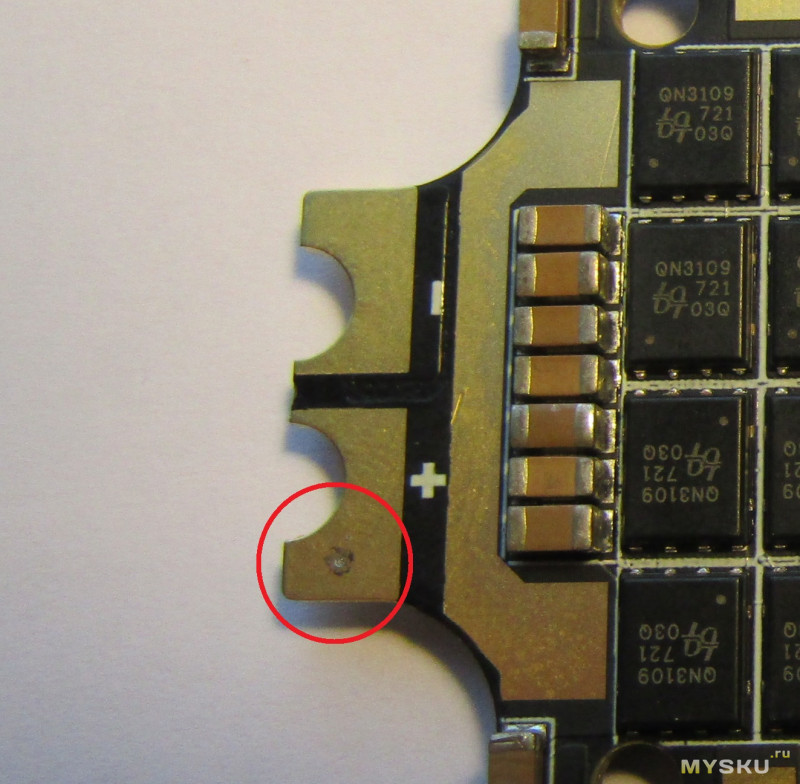
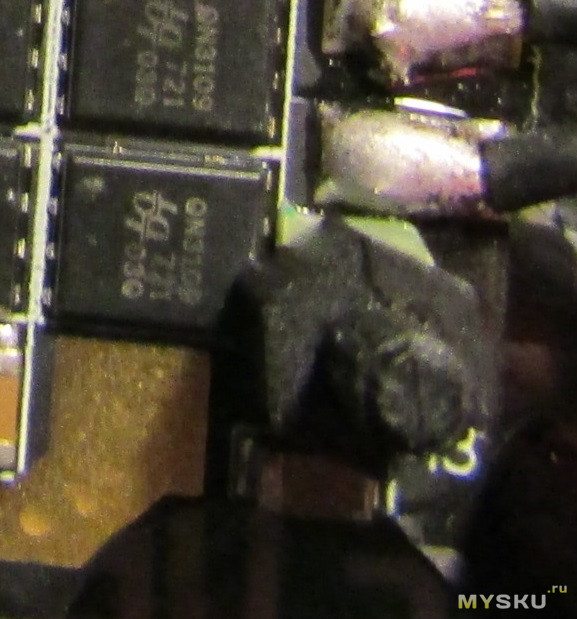
Маркировка мосфетов — QN3109 721 03Q
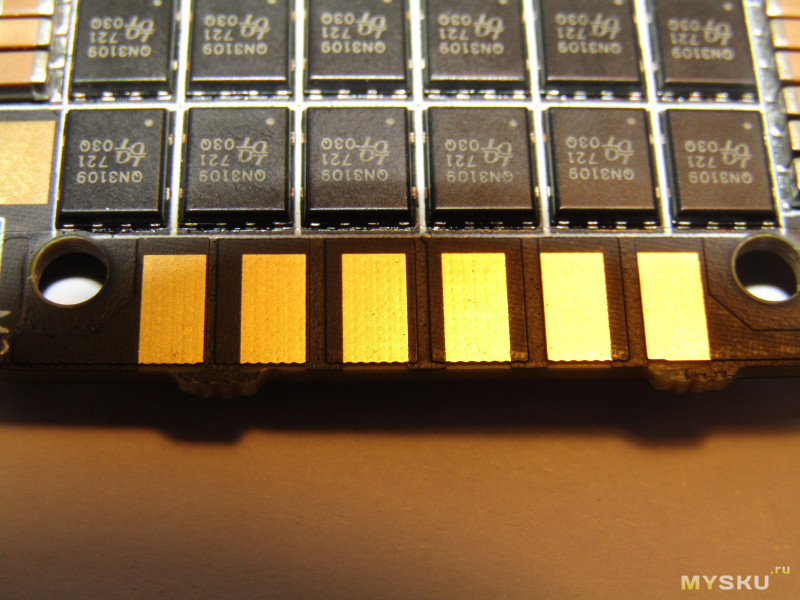
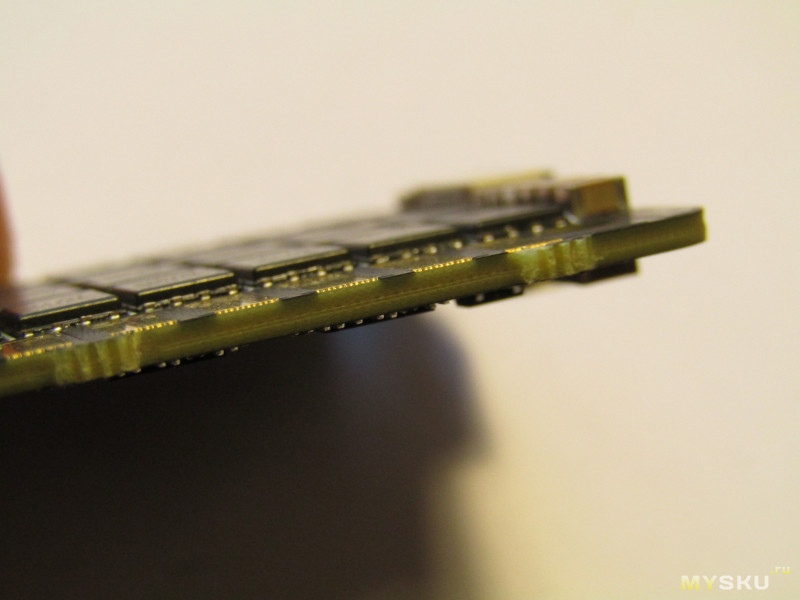
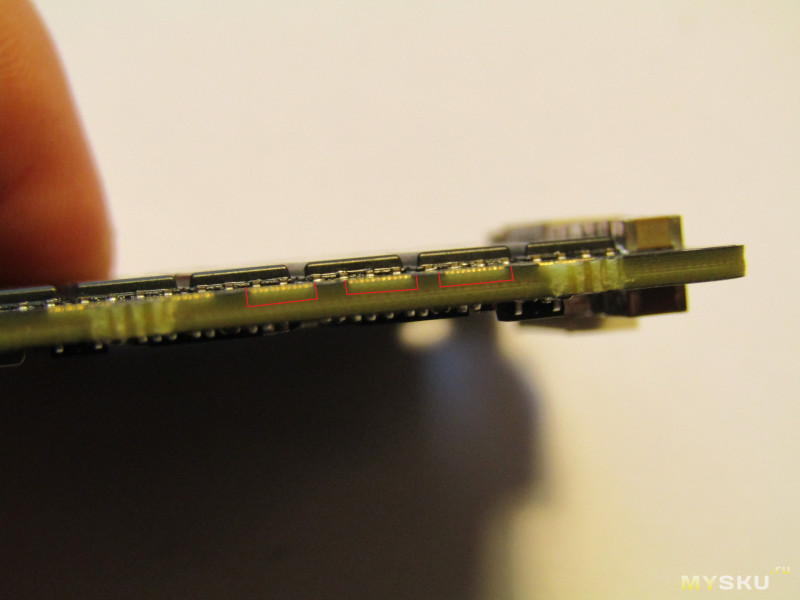
Теперь рассмотрим дорожки!
Как видно они стали больше.Так же видно что дорожка не кончается оголённой частью, по бокам есть непосредственно запас ещё! Выглядит внушительно.
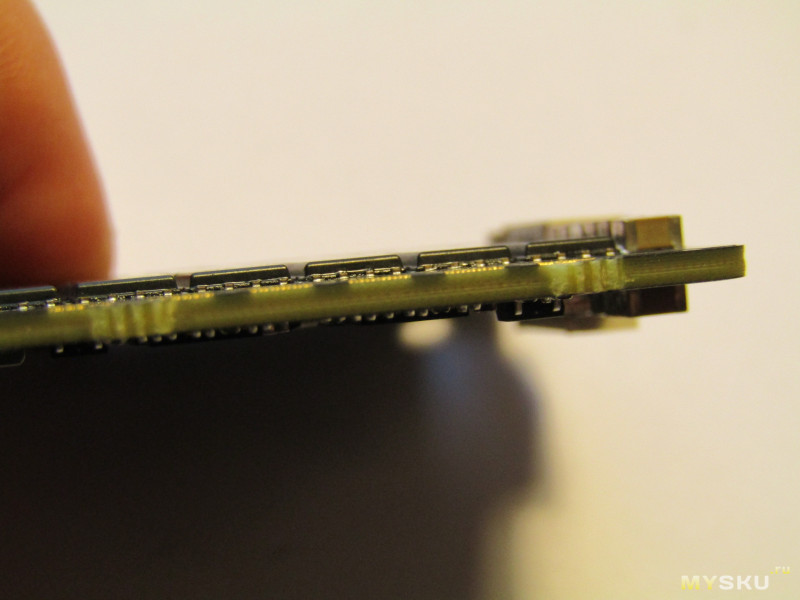
Если посмотреть как бы в разрез платы, есть ощущение что дорожки примерно утоплены на пол платы.К сожалению камера не смогла чётко показать это, и я могу ошибаться.Но, данный регулятор летает и проблем с дорожками нету, об этом подробнее далее.
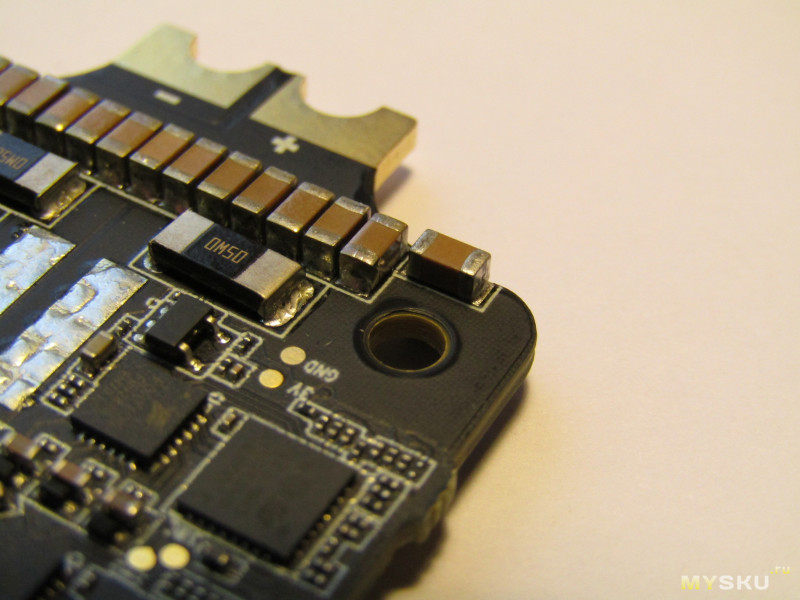
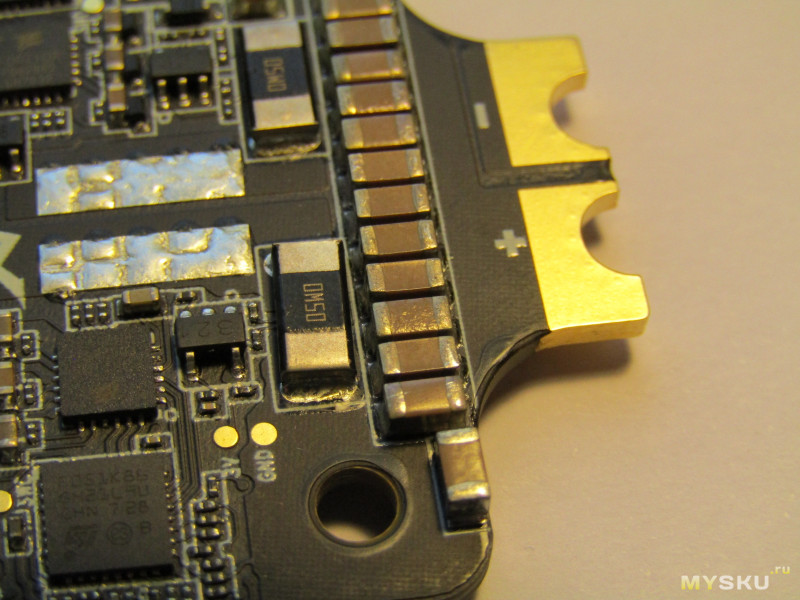
Небольшие опасения вызывают конденсаторы стоящие на краю платы.Но я на болт накрутил пластиковую гайку и всё прекрасно с запасом встало.
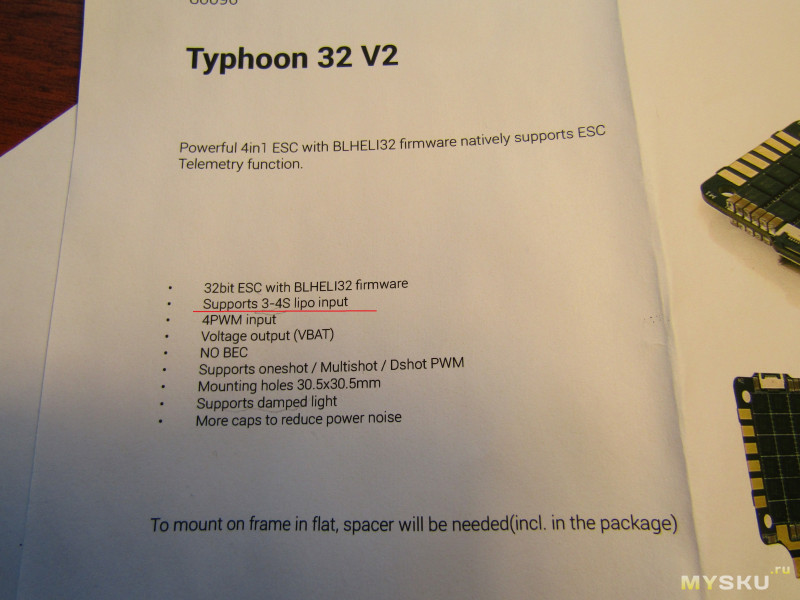
Взглянем на инструкцию.На что хочется обратить внимание, это на то что в инструкции стоит рабочее напряжение 3-4s а на сайте 3-6s! Лично я летал на 4s только.
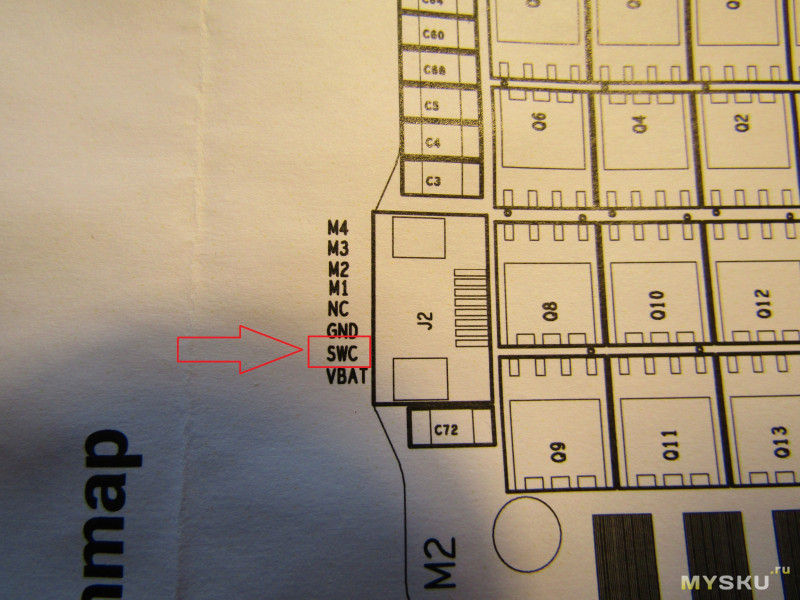
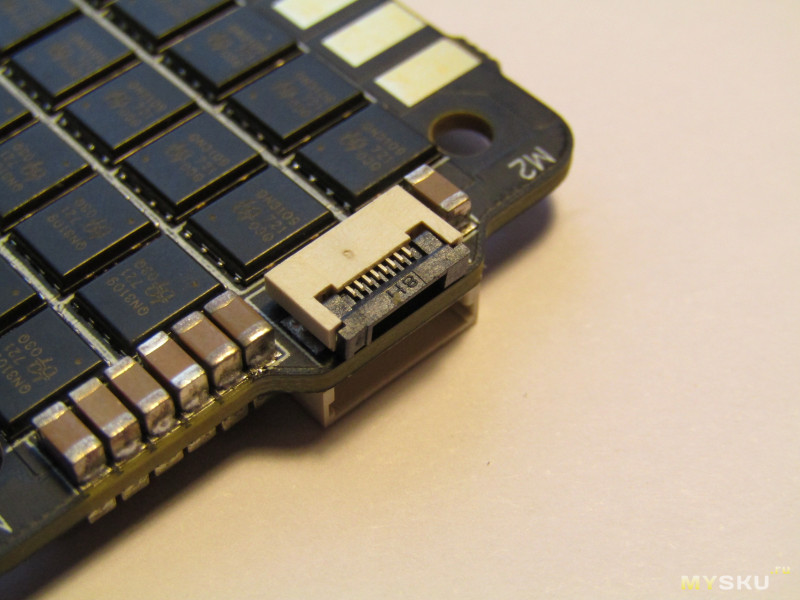
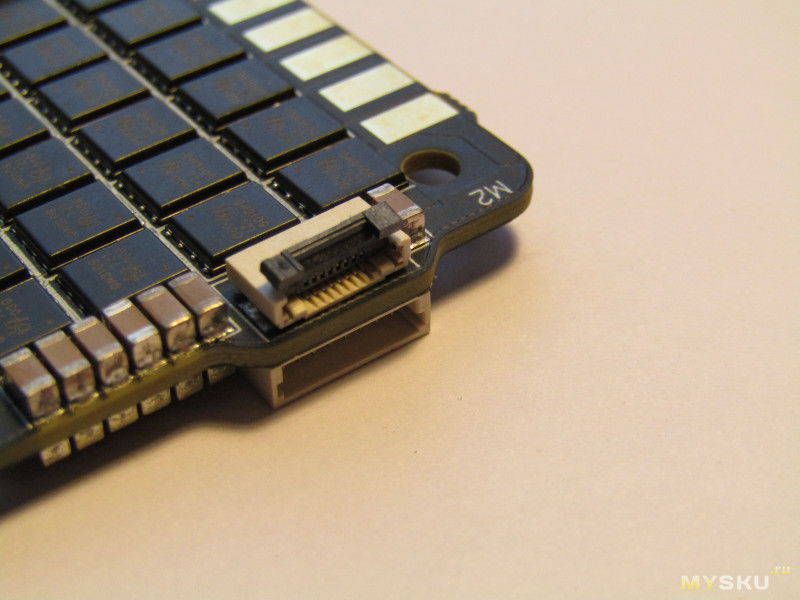
Чему я очень обрадовался, так это тому что они добавили в разъём вывод телеметрии!!! Теперь одним «шлейфом» всё соединили и ни какой доп пайки.Но! Если вам нужно Airbot оставил пятаки (SWC) на плате с выводом телеметрии
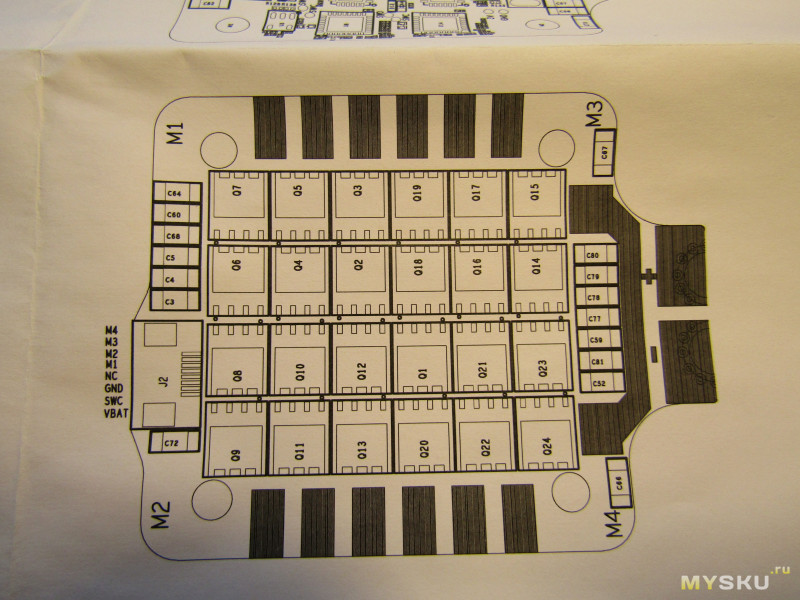
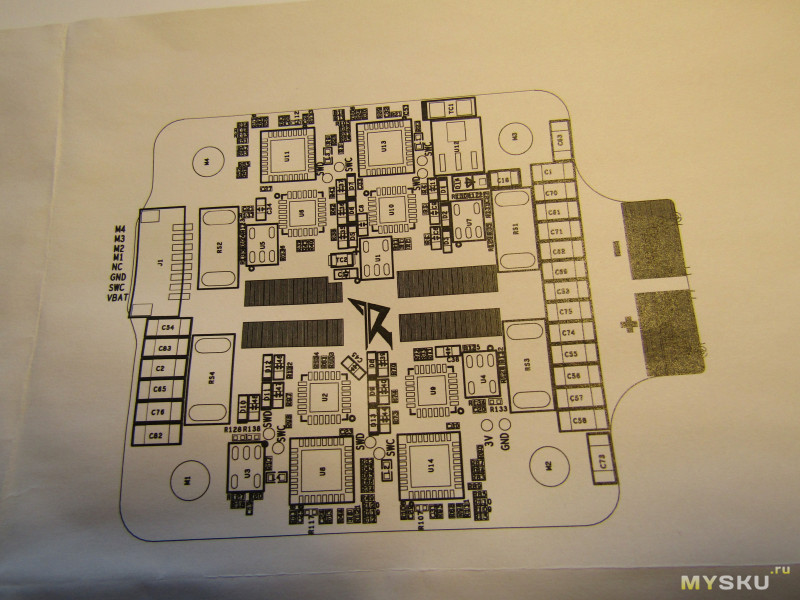
Общий план распиновки и нумерации деталей на плате.
1)Стандартный разъём с подключаемой фишкой и проводами.
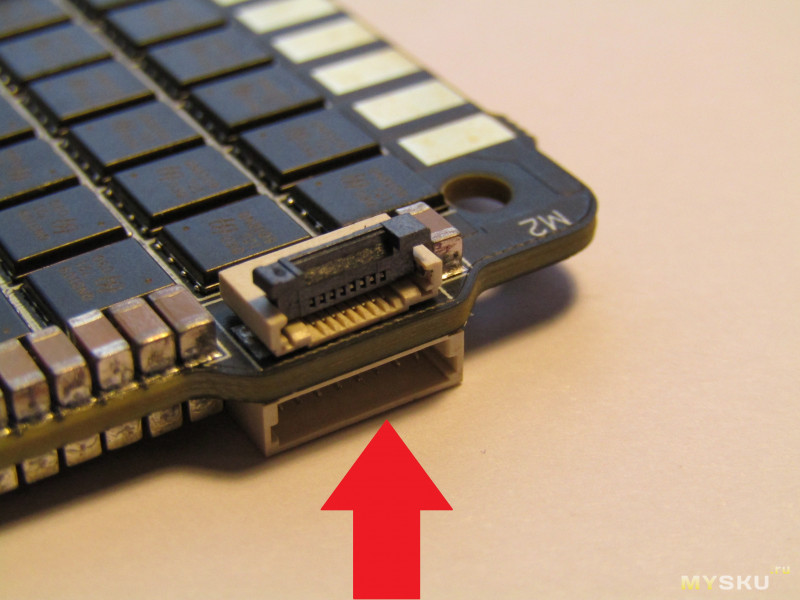
2)Разъём для подключения шлейфа, но пока что шлейф купить негде, и нету ПК с таким разъёмом.Безусловно это облегчает вес, но при сильном ударе может всё сломаться, по этому очень спорное решение, но что ж пусть будет.
Предлагаю взглянуть ещё на фото платы и пайки.Есть некоторые элементы которые стоят как бы под углом, но всё припаяно качественно.Но хочу обратить внимание на то, что мне выслали данный регулятор до того как он поступил в продажу, по этому возможно собирался вручную.
Насчёт точки на плюсовом контакте… Я так и не понял что это, перетравили плату, не до травили.Но она не сквозная, и буквально как царапина, на работу ни как не влияет.


Настройка телеметрии с регуляторов происходит аналогичным образом как тут, за исключением того что паять провода телеметрии уже не надо.(В середине статьи на которую привёл ссылку расписано подробно о настройке телеметрии.)
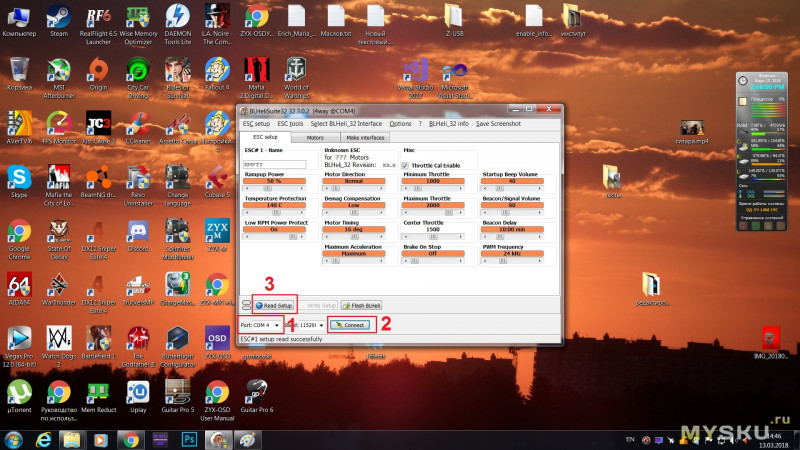
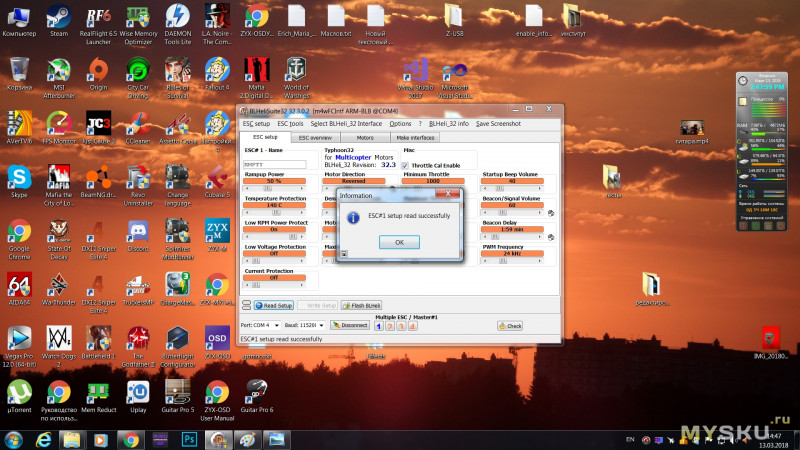
После всех манипуляций, подключаем мозг к компьютеру, и подсоединяем батарейку к квадрокоптеру.В окне выбираем нужный нам ком порт и жмём коннект.Для того что бы прочитать настройки регуляторов жмём Read setup.
Выскакивает окно о версиях прошивки каждого регулятора и то что с ними всё в порядке.
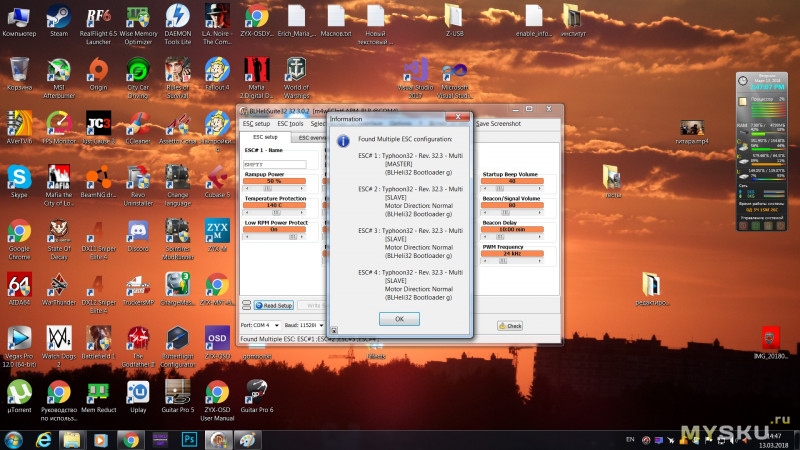
Жмём ок и нам сообщают что настройки 1 регулятора прочитаны, жмём окей и можем приступить к настройке если надо.
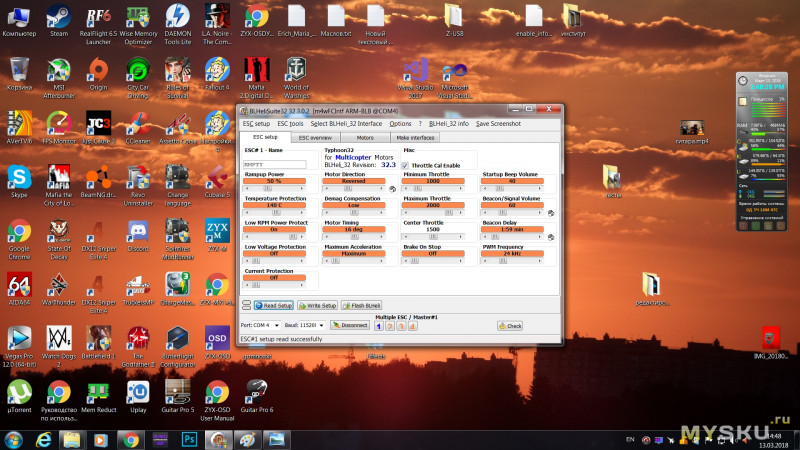
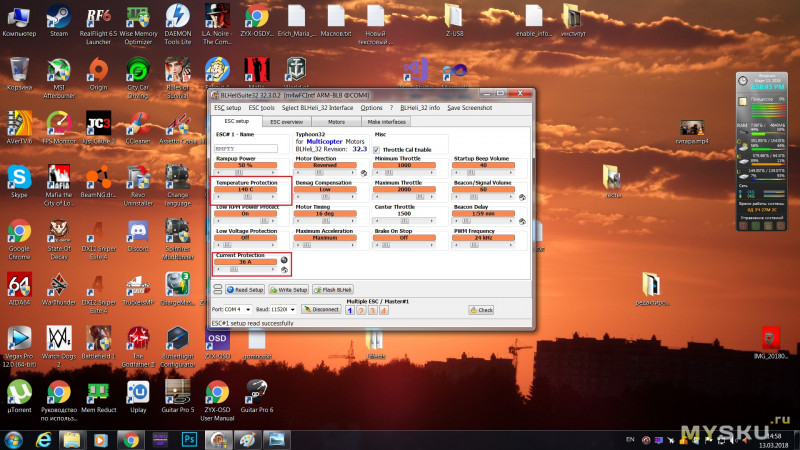
Из интересного я бы выделил это тепловую защиту каждого регулятора и защиту по току, то-есть больше указанного значения Ампер регулятор не будет потреблять.
На счёт цены.Многие в прошлом обзоре говорили вот 60$ это дорого зачем покупать? Несомненно это не дешёвые регуляторы, но посмотри в сторону других производителей, те же DYS,Littelbee продают регуляторы по таким же ценам, так ещё и на старых процессорах собраны.Не берите эти слова близко к сердцу, это лично моё мнение.
Так что регулятор исправен, напайка доп. конденсаторов не нужна, все системы работают исправно.Брать или не брать зависит от вас, информацию я предоставил =)
На первом видео в правой части находится показания оборотов двигателей а чуть ниже температура регуляторов.
А тут просто полёт уже с экшен камерой(как оказалось она ещё не очень плотно сидела и немного ёрзала, отсюда лёгкие так скажем вибрации)
Вкратце про прошлую версию.Из-за тонких дорожек на плате, происходил перегрев их и как следствие возгорание, и выход платы из строя подробнее можно узнать тут
Краткие характеристики V2:
— Питание (LiPo) 3-6s
— Поддержка всех протоколов (Оnehot / Multishot / Dshot / PWM)
— 32-х битная прошивка (BLHELI32)
— Поддержка полной телеметрии
— Монтажные отверстия 30.5x30.5mm
— Рабочий ток каждого регулятора 35А
Улучшения:
— Полностью переработана плата
— Добавление конденсаторов
— Перекомпоновка элементов на плате
Что такое BLHELI32?
Blhelli это прошивка непосредственно для самих регуляторов оборотов.Предыдущая версия называлась Blhelli_s, работала с 8 битными процессорами и была написана на ассемблере.Blhelli32 работает уже с процессорами 32 бита и написана на языке С(си).
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов.Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты.Но это на словах, реально подтвердить или опровергнуть пока что я не могу.Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов.
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов.Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты.Но это на словах, реально подтвердить или опровергнуть пока что я не могу.Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов.
Приступим к осмотру посылки и содержимого.
Приходит регулятор в простом почтовом пупырчатом конверте.Внутри находиться регулятор в антистатическом пакете, пакетик с 4 проставками из текстолита и инструкция с распинвокой.Осмотрим сначала нижнюю сторону платы.Как видно пайка хорошая, для каждого регулятора присутствует свой индивидуальный датчик тока(с которого мы можем получать данные).Так же в глаза бросается большое количество конденсаторов, по заявлению производителя их напаяно достаточно, так что установка доп. конденсаторов не нужна.
Странное и спорное решение насчёт оголённых участков платы.Зачем сделано не понятно, но опустим это.
Видим 4 32-х битных STM процессора на плате.
Маркировка — f051k86
Потом идут 4 драйвера ключей.
Маркировка — fortior fd6288q
Перевернём плату и осмотрим другую её сторону.
Как видно все мосфеты собраны в одно место.Моё мнение это только лучше так как минимум дорожек надо вести по плате, выглядит эстетичнее, больше места стало непосредственно для вывода дорожек к которым будут подпаиваться провода моторов.
Маркировка мосфетов — QN3109 721 03Q
Теперь рассмотрим дорожки!
Как видно они стали больше.Так же видно что дорожка не кончается оголённой частью, по бокам есть непосредственно запас ещё! Выглядит внушительно.
Если посмотреть как бы в разрез платы, есть ощущение что дорожки примерно утоплены на пол платы.К сожалению камера не смогла чётко показать это, и я могу ошибаться.Но, данный регулятор летает и проблем с дорожками нету, об этом подробнее далее.
Небольшие опасения вызывают конденсаторы стоящие на краю платы.Но я на болт накрутил пластиковую гайку и всё прекрасно с запасом встало.
Фото установки
Постарался максимально понятно сфоткать 

Взглянем на инструкцию.На что хочется обратить внимание, это на то что в инструкции стоит рабочее напряжение 3-4s а на сайте 3-6s! Лично я летал на 4s только.
Чему я очень обрадовался, так это тому что они добавили в разъём вывод телеметрии!!! Теперь одним «шлейфом» всё соединили и ни какой доп пайки.Но! Если вам нужно Airbot оставил пятаки (SWC) на плате с выводом телеметрии
Общий план распиновки и нумерации деталей на плате.
Варианты подключение регулятора к ПК
На плате реализована два разъёма для соединения регулятора с мозгом квадрокоптера.1)Стандартный разъём с подключаемой фишкой и проводами.
2)Разъём для подключения шлейфа, но пока что шлейф купить негде, и нету ПК с таким разъёмом.Безусловно это облегчает вес, но при сильном ударе может всё сломаться, по этому очень спорное решение, но что ж пусть будет.
Предлагаю взглянуть ещё на фото платы и пайки.Есть некоторые элементы которые стоят как бы под углом, но всё припаяно качественно.Но хочу обратить внимание на то, что мне выслали данный регулятор до того как он поступил в продажу, по этому возможно собирался вручную.
Доп. фото
Насчёт точки на плюсовом контакте… Я так и не понял что это, перетравили плату, не до травили.Но она не сквозная, и буквально как царапина, на работу ни как не влияет.
Вес
15.76 граммУстановка на квадрокоптер
Для корректной установки нам понадобятся текстолитовые проставки которые идут в комплекте.Они кладутся на сторону где распаяны мосфеты, что бы выровнять высоту относительно мосфетов.Потом припаиваются моторы к выводом регуляторов и соединяется кабелем регулятор с ПК!Настройка телеметрии с регуляторов происходит аналогичным образом как тут, за исключением того что паять провода телеметрии уже не надо.(В середине статьи на которую привёл ссылку расписано подробно о настройке телеметрии.)
Настройки регуляторов
Что бы войти в настройки регуляторов нам нужна специальная программа BLHeliSuite32.Скачиваем её, устанавливаем и запускаем.В роли адаптера выступает сам мозг квадрокоптера.После всех манипуляций, подключаем мозг к компьютеру, и подсоединяем батарейку к квадрокоптеру.В окне выбираем нужный нам ком порт и жмём коннект.Для того что бы прочитать настройки регуляторов жмём Read setup.
Выскакивает окно о версиях прошивки каждого регулятора и то что с ними всё в порядке.
Жмём ок и нам сообщают что настройки 1 регулятора прочитаны, жмём окей и можем приступить к настройке если надо.
Из интересного я бы выделил это тепловую защиту каждого регулятора и защиту по току, то-есть больше указанного значения Ампер регулятор не будет потреблять.
Вывод
Отлетал я около 10 аккумуляторов на данном регуляторе.Ни каких сбоев глюков и прочего не было, жарил по полной, было несколько падений.Регулятор выжил ничего не сломалось и не погорело.Все функции работают исправно.Можно уверенно сказать что работа была проделана хорошая и ошибки убрали.На счёт цены.Многие в прошлом обзоре говорили вот 60$ это дорого зачем покупать? Несомненно это не дешёвые регуляторы, но посмотри в сторону других производителей, те же DYS,Littelbee продают регуляторы по таким же ценам, так ещё и на старых процессорах собраны.Не берите эти слова близко к сердцу, это лично моё мнение.
Так что регулятор исправен, напайка доп. конденсаторов не нужна, все системы работают исправно.Брать или не брать зависит от вас, информацию я предоставил =)
Полёт и работа телеметрии
Ниже я предлагаю посмотреть на то как работает телеметрия с регуляторов, а потом оценить просто сам полёт на квадрокоптере с данным регулятором.На счёт небольших трясок- это параметры PID до конца не настроены, рама оказалось очень шумной и гироскоп немного трудно справляется с фильтрацией шумов.На первом видео в правой части находится показания оборотов двигателей а чуть ниже температура регуляторов.
А тут просто полёт уже с экшен камерой(как оказалось она ещё не очень плотно сидела и немного ёрзала, отсюда лёгкие так скажем вибрации)
Самые обсуждаемые обзоры
| +90 |
2422
30
|
| +35 |
1978
63
|
Рациональненько.
Просто стоимость грамотной программы в разы дороже 4х отдельных деталек.
хотя у меня есть шпиндель с частотником, так там дсп стоит
там даже трансформатор не импульсный
Возьми Firefox 17 и работай на 4Гб комфортно.
Ах да, плюшек современных не хватает?
То-то и оно. А в данном случае — ESC — законченное и самодостаточное устройство.
Открою секрет:
там 3 фазы на движок — это 6 PWM ног, далее, PWM-capture нога для входа управления.
Далее идёт как минимум 1 АЦП на фазу и 1 общий АЦП.
Итого на 1 движок 7 ШИМ + 4 АЦП минимум
Оставим лирику расчётов требования математики всяких цифровых фильтров, т.к. видно, что 28 ШИМ и 16 АЦП в этом контроллере нету. И даже в больших контроллерах — ещё поискать надо.
… с этого (с того, с вон того) контакта…
ключевое слово — «как я понял»
Право, у меня жир из монитора уже сочится.
мосты… песок…
вы про что?
В то же время производители сего влепили 4 камня и косят бабло, выпустив решение раньше всех…
это наверно какой-то инженерный образец в единственном числе?)
Решаем обратную задачу. Допустим программеру заплатим 1000. Итого на том же тираже в 10000шт один жЫрный контроллер должен стоить не больше ~1,8бакса. Вот только про количество шимов выше сказали. А такое количество обычно в очень жирных корпусах. Который может и вообще на эту платку не поместиться.
В общем неоднозначно это все и кричать «фу, 4 контроллера на элементарную задачу!!»… как минимум не очень умно без пристального изучения всех аспектов задачи.
Там должны стоять полимерные низкопрофильные Ultra Low ESR
Типа таких
наверное у терминатора тоже был контроллер на 4 канала
В любом случае, это все галимая реклама. Программу обновляют — хорошо, никто не спорит. Перешли на новые процы — тоже похвально. Но результат пока не прямо таки аховый.
А так да, плохой программист на асме напишет хуже, чем хороший на си, вполне допускаю.
Размер кода тоже имеет значение.
Сам писал только на асме довольно долгое время. Так вот, зная и то, и другое, Си позволяет на порядки ускорить разработку не теряя в качестве.
Да и разработка на чистом асме имеет смысл разве что для очень простых архитектур, типа AVR8, на том же STM32 это будет просто баловством, ибо если писать что-то сложнее мигалки, то проще застрелиться. Естественно надо знать и железо, и поглядывать в результат работы компилятора в спорных местах, возможно где-то делать ассемблерные вставки (хотя необходимость их — признак неверно выбранной структуры программы) но полностью писать — бред.
Удобно, быстро. Для входа в увлечение — самое то. Но раньше все были довольны самодельными платами. Даже навесняком. Разработке конструкции это не мешало.
Бывает, надо подсказать компилятору, что надо бы использовать какие-то инструкции, специфичные для архитектуры во благо дела, так для этого в Си есть intrinsics aka builtins.
Они есть для битовых операций типа поиска ведущих нулей, переворачивания битов, есть для синхронизации потоков, есть для MMX/SSE/AVX ну, или NEON на ARM или VIS на SPARC, кому чего, FMA на F4 и т.д.
Тут уже ассемблер знать не надо, надо знать устройство архитектуры процессора, технику быстрой синхронизации и приёмы программирования векторных алгоритмов, их там довольно много.
Преимущества в в виде цифры 32 (все же понимают, что это лучше чем 8) и телеметрии, которая непонятно для чего нужна (ну кроме как внедрения не продающихся ПК на F7)…
На этой плате JST.