Электронный стедикам для видеосъемки на плате AlexMos 8-бит своими руками

- Цена: $49.00
- Перейти в магазин
Где-то пару лет назад меня очень впечатлил ролик о Movi — электронном стабилизаторе для видеосъемки. Производитель тогда выставил просто заоблачный ценник, однако почти в то же время на Ютубе появилось видео о контроллере AlexMos, разработанном для аналогичных задач. Почитав разные форумы, еще раз впечатлившись невероятно плавным стабилизированным видео, я решил по мере возможности собрать свой стедикам на бесщеточных моторах. Покупка комплектующих происходила постепенно, с выжиданием скидок, купонов.
Это не руководство по сборке стабилизатора, а лишь обзор, в котором показано, что при желании можно собрать аппарат дешевле в 4-5 раз, чем серийные, и при этом он будет достаточно неплохо работать. У меня нет схем или чертежей, все делалось интуитивно, после просмотра роликов на ютубе, чтения форумов (например).
Контроллер AlexMos
https://aliexpress.com/item/item/AlexMos-Latest-Version-V2-4-8bit-Firmware-Simple-Brushless-Gimbal-Controller-W-IMU-3-axis-Module/2027209503.html
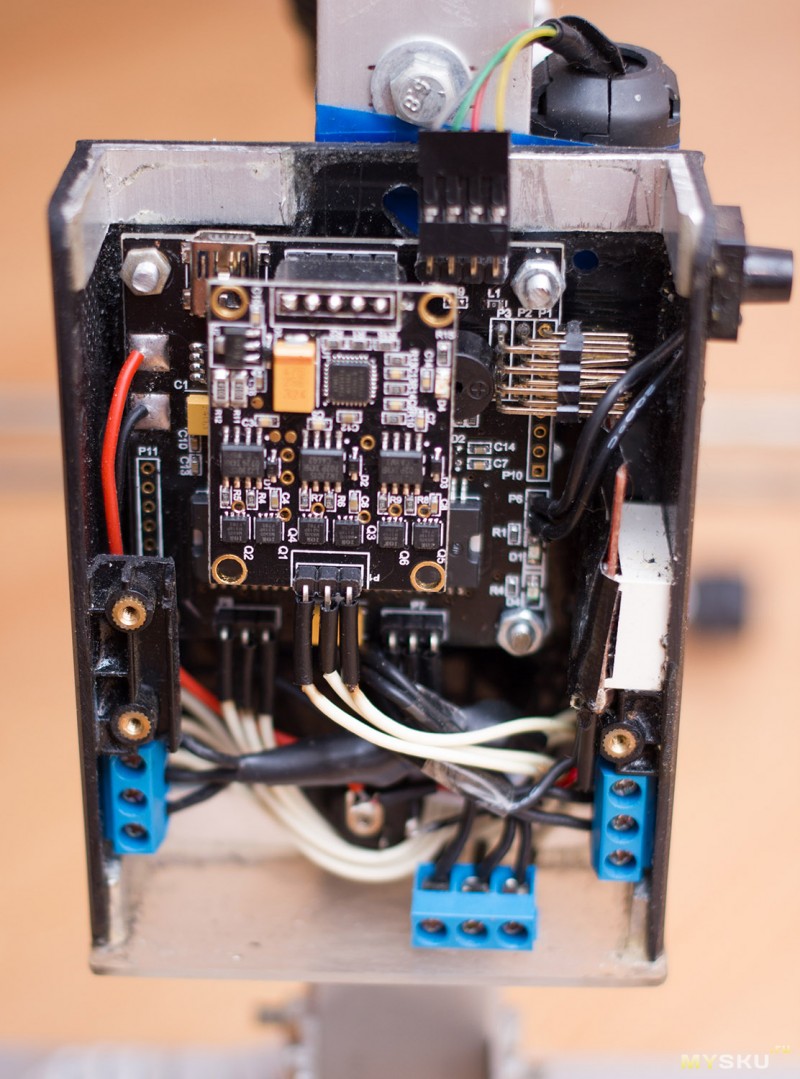
Собственно плата управления с датчиком положения (гироскоп+акселлерометр). Плата старая, 8-битная. Сейчас уже выпущена 32-битная, которая проще настраивается и эффективнее стабилизирует. Сам принцип стабилизации основан на том, что контроллер определяет положение датчика в пространстве и подает импульсы тока на двигатели, которые компенсируют отклонение датчика от нормального положения. Настройка параметров платы осуществляется на компьютере через usb-порт с помощью удобного приложения SimpleBGC (Сайт разработчика).Этот процесс на 8-битной плате из разряда танцов с бубном и требует немало времени для понимания влияния параметров на поведение стедикама. Коробочка самодельная, склеена эпоксидкой из пластмассового хлама.
Моторы
https://aliexpress.com/item/item/DYS-Brushless-Gimbal-Motor-GBM6324-180T-w-Slipring-Sealed-Case-for-DSLR-FPV-Aerial-Photography/1872805864.html
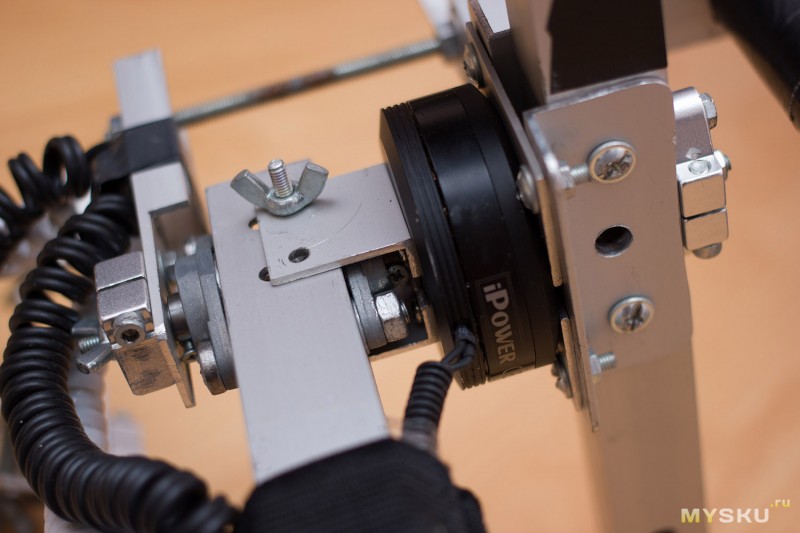
Требуются специальные моторы, в описании которых указано «for gimbal». Они отличаются от квадрокоптерных бесщеточных моторов толщиной провода обмотки. Мне удалось по акционной вкусной цене взять отличные моторы IPower GBM6324-180T. Они имеют пылезащищенный корпус, а по параметрам аналогичны распространенным GBM5108-180T. Моторы имеют довольно слабенький подшипник, поэтому рекомендуется ставить их через усиленный опорный подшипник на раме. Hollow shaft говорит о том, что вместо привычного якоря в двигателе дырка, удобная для проводки проводов или, как в моем случае, для опорного стержня.
Подшипники и фиксаторы
https://aliexpress.com/item/item/wholesales-10pcs-8mm-caliber-zinc-alloy-bearing-KFL08-FL08-flange-bearing-with-pillow-block/1540375712.html
https://aliexpress.com/item/item/10PCS-SHF8-Horizontal-Type-Shaft-End-Supports-Linear-Rod-Rail-Shaft-Support-XYZ-Table-CNC-Parts/1298770600.html
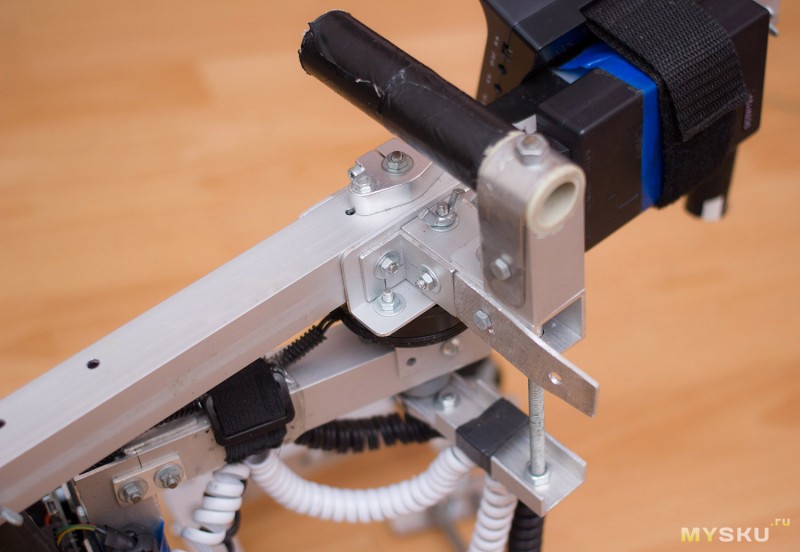
У меня мало опыта в этой сфере. Путем долгих поисков были выбраны элементы, используемые для 3д-принтеров. К сожалению, они достаточно тяжеловаты. Однако за аналогичную цену ничего лучше не нашлось. Диаметр подшипников и фиксаторов 8 мм, все моторы установлены на опорные подшипники, закрепленные на 8 мм металлических стержнях, которые в свою очередь крепятся к раме зажимами (фиксаторами). Моторы жестко закреплены к раме только с одной стороны, со второй стороны нет жесткого крепления, только боковые фиксаторы, которые толкают подвижный элемент. Т.е. элементы рамы держаться на металлических стержнях, проходящих через моторы, на самих моторах ничего не висит — их задача только толкать. Кое-где на для страховки установлены болты в боковых фиксаторах (на моторе оси Yaw это видно). Фиксаторы на моторе оси Roll обмотаны в несколько слоев черной изолентой для обеспечения демпфирующего эффекта.
Рама
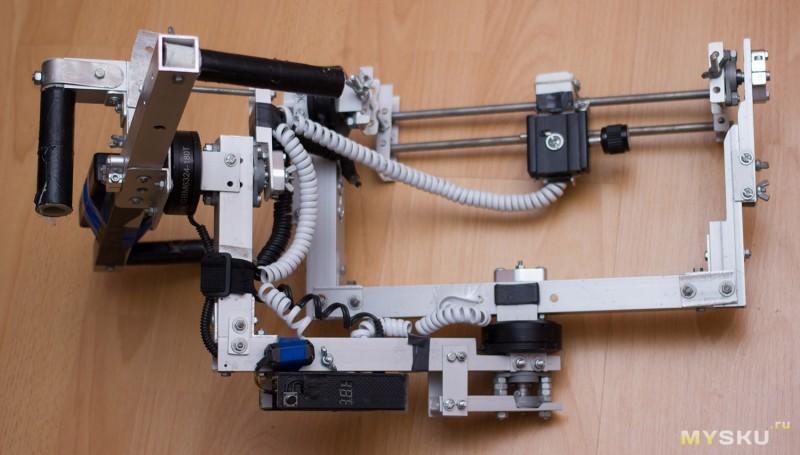
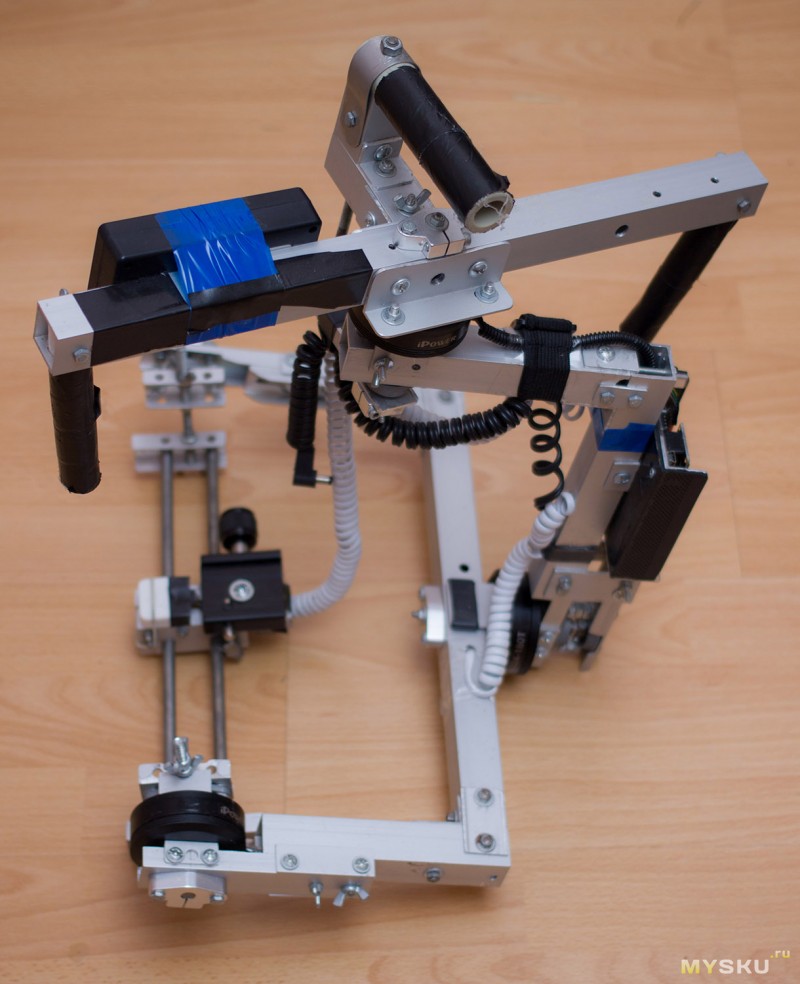
Рама создавалась чисто интуитивно из алюминиевого профиля 25х25х2 мм из строительного магазина. Сейчас, после опыта эксплуатации, есть мысли как можно было сделать лучше. Хотя вцелом стаб работает и улучшить радикально его может лишь 32-битная версия платы. Рама имеет регулировку по одной оси. Этого достаточно для нахождения механической балансировки равновесия по осям. Витые провода — телефонные провода (от трубки к аппарату) из местного радиомагазина. Датчик IMU расположен чуть спереди площадки для камеры (к нему идет длинный белый витой кабель).
Аккумулятор
Ссылка на другого продавца, по моей ссылке уже нет в продаже:
https://aliexpress.com/item/item/12V-DC-USB-5V-Rechargeable-Li-po-Battery-4-CCTV-Camera-ECOS-2600/32310491737.html
Для питания требуется 12В аккумулятор. В моем случае отлично подошел powerbank. При заявленной емкость в 3800 мАч, он обеспечивает около 3 часов работы. Контроллер Alexmos имеет функцию компенсации напряжения для поддержки заданного значения (11,1 Вольт).
Внешний монитор
https://aliexpress.com/item/item/TFT-LCD-MONITOR-COLOR-CCTV-Security-Surveillance-CAMERA-TESTER-TEST-12V-OUTPUT-F2024A-Alishow/874066812.html
В качестве дисплея для мониторинга съемки можно использовать дисплей камеры (особенно, если есть поворотный). Или же поставить выносной. Тестер камер наблюдения хорошо выполняет эту роль, а огромный его плюс — встроенный аккумулятор. Нагрузка на основной аккумулятор и так достаточно высокая, поэтому я бы не решился еще монитор туда вешать.
Площадка для камеры

https://aliexpress.com/item/item/In-stock-Clamp-and-QR-Quick-Release-Plate-Compatible-for-Tripod-Ball-Head-free-shipping-gLjGB/2032085315.html
Неожиданно тяжелая цельнометаллическая площадка. Тем не менее, очень удобная. Камеры быстро снимается с крепление и также быстро ставится обратно. Есть кнопка фиксации, можно двигать камеру вперед-назад, чтобы выставить точку равновесия. Площадка расположена на двух стальных трубках (туристический инвентарь), по которым может быть сдвинута вправо-влево для балансировки по оси двигателя Roll.
Настройка механики
Хорошее руководство по настройке механического баланса есть для Dji Ronin — www.youtube.com/watch?v=JINyZMYN-tI.
Первым делом нужно выставить механический баланс, т.е. по каждой оси площадка с камерой должна быть уравновешена. Это очень важно, так как при неправильном балансе моторы будут греться, быстрее расходовать батарею, а то и вовсе стедикам не сможет откалиброваться. Начинается процесс с площадки с камерой:
1) камера не должна заваливаться вперед или назад. Центр тяжести камеры с площадкой должен как можно точнее совпадать с осью мотора Pitch
2) площадка с камерой не должна заваливаться вправо или влево по оси Roll, т.е. центр тяжести должен проходить через ось мотора Roll
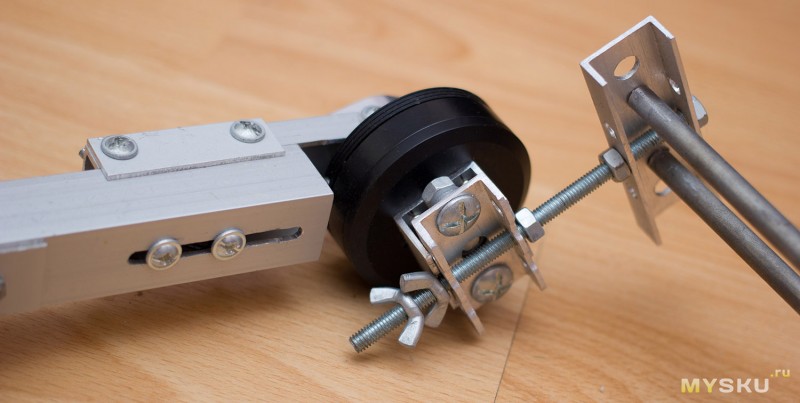
3) вся нижняя часть рамы вместе с камерой должна быть уравновешена по оси Yaw. Для регулировки у меня используются два зажима, позволяющие сдвинуть мотор и площадку с камерой вперед-назад.
Настройка электроники
Важно проверить правильность подключения всех компонентов, проверить чтобы не было обрывов цепи, плохих контактов. Также на кабель датчика рекомендую поставить ферритовый фильтр. И размещать его подальше от других. На практике самую сильную наводку давал видеокабель от камеры к выносному монитору. В первой версии я хотел на один кабель подключить датчик и пару свободных контактов подключить на видеосигнал, но наводка полностью сбивала гироскоп, в итоге все реализовано отдельно.

Далее следует настройка через USB в специальной программе. Не подключайте подвес на USB в выключенном состоянии, т.к. он попытается запитать моторы от 5 Вольт порта и могут слететь настройки контроллера. Настройка PID на 8-битной плате — это довольно долгое занятие, которое сложно описать последовательно, т.к. процесс больше похож на интуитивное ощущение изменений. Вкратце: P — делитель мощности импульсов, I — интервал импульсов, D — длительность серии импульсов. Это определение не совсем правильное, в оригинале параметры обозначают немного другое, но такое описания я составил для себя, как более удобное для понимания. Грубо говоря, если двигатель не может повернуть площадку, то добавляем ему мощности в полях Power и уменьшив делитель Р. Если двигатель дрожит, гудит или входит в резонансное колебание — регулируем I, если происходят срывы в момент доворачивания площадки, то пробуем увеличить D и динамическую мощность в поле + (возле Power). Последняя очень полезна для экономии батареи, дополнительная мощность подается только в момент резкого поворота и контроллер имеет запас для избежания срывов при резких движения. В обычном состоянии контроллер использует просто значение Power. Также рекомендую в закладке Settings выставить поддержку постоянного напряжения и значение напряжения, при котором отключаются двигатели. Без этого есть большая вероятность сброса настроек в случае сильной просадки напряжения.
Небольшое видео со стороны:
Итоги
Видео, снятое с помощью этого стабилизатора, камера Canon 550d 18-55.


Стедикам получился тяжелым, около 4 кг без камеры. С непривычки первый раз было нелегко, рекомендую в качестве приспособления для физических упражнений. Качество стабилизации не сравнится с обычным механическим стабилизатором. Даже при далеко не идеальной конструкции и настройке картинка более стабильна, уверенно держит горизонт. Переключение профилей позволяет снимать в разных режимах. Однако это не оборудование «работающее из коробки». Нужно учиться им пользоваться, даже чувствовать, так как, например, слишком резкий поворот может продавить сопротивление двигателя и прийдется перезапускать контроллер для возврата к нормальной работе. Разумеется, можно увеличить мощность двигателей, но это уже потребует и более мощной батареи.
p.s. Предвидя ряд сложных вопросов, я не занимаюсь изготовлением на заказ, не знаю про другие моторы и другие типы контроллеров. Все знания и опыт касаются только этого конкретного экземпляра. Для тех, кто имеет финансовую возможность — настоятельно рекомендую Dji Ronin — аккуратненький заводской аппарат, очень удобный, которым можно пользоваться почти с коробки, www.dji.com/product/ronin
Это не руководство по сборке стабилизатора, а лишь обзор, в котором показано, что при желании можно собрать аппарат дешевле в 4-5 раз, чем серийные, и при этом он будет достаточно неплохо работать. У меня нет схем или чертежей, все делалось интуитивно, после просмотра роликов на ютубе, чтения форумов (например).
Контроллер AlexMos
https://aliexpress.com/item/item/AlexMos-Latest-Version-V2-4-8bit-Firmware-Simple-Brushless-Gimbal-Controller-W-IMU-3-axis-Module/2027209503.html
Собственно плата управления с датчиком положения (гироскоп+акселлерометр). Плата старая, 8-битная. Сейчас уже выпущена 32-битная, которая проще настраивается и эффективнее стабилизирует. Сам принцип стабилизации основан на том, что контроллер определяет положение датчика в пространстве и подает импульсы тока на двигатели, которые компенсируют отклонение датчика от нормального положения. Настройка параметров платы осуществляется на компьютере через usb-порт с помощью удобного приложения SimpleBGC (Сайт разработчика).Этот процесс на 8-битной плате из разряда танцов с бубном и требует немало времени для понимания влияния параметров на поведение стедикама. Коробочка самодельная, склеена эпоксидкой из пластмассового хлама.
Моторы
https://aliexpress.com/item/item/DYS-Brushless-Gimbal-Motor-GBM6324-180T-w-Slipring-Sealed-Case-for-DSLR-FPV-Aerial-Photography/1872805864.html
Требуются специальные моторы, в описании которых указано «for gimbal». Они отличаются от квадрокоптерных бесщеточных моторов толщиной провода обмотки. Мне удалось по акционной вкусной цене взять отличные моторы IPower GBM6324-180T. Они имеют пылезащищенный корпус, а по параметрам аналогичны распространенным GBM5108-180T. Моторы имеют довольно слабенький подшипник, поэтому рекомендуется ставить их через усиленный опорный подшипник на раме. Hollow shaft говорит о том, что вместо привычного якоря в двигателе дырка, удобная для проводки проводов или, как в моем случае, для опорного стержня.
Подшипники и фиксаторы
https://aliexpress.com/item/item/wholesales-10pcs-8mm-caliber-zinc-alloy-bearing-KFL08-FL08-flange-bearing-with-pillow-block/1540375712.html
https://aliexpress.com/item/item/10PCS-SHF8-Horizontal-Type-Shaft-End-Supports-Linear-Rod-Rail-Shaft-Support-XYZ-Table-CNC-Parts/1298770600.html
У меня мало опыта в этой сфере. Путем долгих поисков были выбраны элементы, используемые для 3д-принтеров. К сожалению, они достаточно тяжеловаты. Однако за аналогичную цену ничего лучше не нашлось. Диаметр подшипников и фиксаторов 8 мм, все моторы установлены на опорные подшипники, закрепленные на 8 мм металлических стержнях, которые в свою очередь крепятся к раме зажимами (фиксаторами). Моторы жестко закреплены к раме только с одной стороны, со второй стороны нет жесткого крепления, только боковые фиксаторы, которые толкают подвижный элемент. Т.е. элементы рамы держаться на металлических стержнях, проходящих через моторы, на самих моторах ничего не висит — их задача только толкать. Кое-где на для страховки установлены болты в боковых фиксаторах (на моторе оси Yaw это видно). Фиксаторы на моторе оси Roll обмотаны в несколько слоев черной изолентой для обеспечения демпфирующего эффекта.
Рама
Рама создавалась чисто интуитивно из алюминиевого профиля 25х25х2 мм из строительного магазина. Сейчас, после опыта эксплуатации, есть мысли как можно было сделать лучше. Хотя вцелом стаб работает и улучшить радикально его может лишь 32-битная версия платы. Рама имеет регулировку по одной оси. Этого достаточно для нахождения механической балансировки равновесия по осям. Витые провода — телефонные провода (от трубки к аппарату) из местного радиомагазина. Датчик IMU расположен чуть спереди площадки для камеры (к нему идет длинный белый витой кабель).
Аккумулятор
Ссылка на другого продавца, по моей ссылке уже нет в продаже:
https://aliexpress.com/item/item/12V-DC-USB-5V-Rechargeable-Li-po-Battery-4-CCTV-Camera-ECOS-2600/32310491737.html
Для питания требуется 12В аккумулятор. В моем случае отлично подошел powerbank. При заявленной емкость в 3800 мАч, он обеспечивает около 3 часов работы. Контроллер Alexmos имеет функцию компенсации напряжения для поддержки заданного значения (11,1 Вольт).
Внешний монитор
https://aliexpress.com/item/item/TFT-LCD-MONITOR-COLOR-CCTV-Security-Surveillance-CAMERA-TESTER-TEST-12V-OUTPUT-F2024A-Alishow/874066812.html
В качестве дисплея для мониторинга съемки можно использовать дисплей камеры (особенно, если есть поворотный). Или же поставить выносной. Тестер камер наблюдения хорошо выполняет эту роль, а огромный его плюс — встроенный аккумулятор. Нагрузка на основной аккумулятор и так достаточно высокая, поэтому я бы не решился еще монитор туда вешать.
Площадка для камеры
https://aliexpress.com/item/item/In-stock-Clamp-and-QR-Quick-Release-Plate-Compatible-for-Tripod-Ball-Head-free-shipping-gLjGB/2032085315.html
Неожиданно тяжелая цельнометаллическая площадка. Тем не менее, очень удобная. Камеры быстро снимается с крепление и также быстро ставится обратно. Есть кнопка фиксации, можно двигать камеру вперед-назад, чтобы выставить точку равновесия. Площадка расположена на двух стальных трубках (туристический инвентарь), по которым может быть сдвинута вправо-влево для балансировки по оси двигателя Roll.
Настройка механики
Хорошее руководство по настройке механического баланса есть для Dji Ronin — www.youtube.com/watch?v=JINyZMYN-tI.
Первым делом нужно выставить механический баланс, т.е. по каждой оси площадка с камерой должна быть уравновешена. Это очень важно, так как при неправильном балансе моторы будут греться, быстрее расходовать батарею, а то и вовсе стедикам не сможет откалиброваться. Начинается процесс с площадки с камерой:
1) камера не должна заваливаться вперед или назад. Центр тяжести камеры с площадкой должен как можно точнее совпадать с осью мотора Pitch
2) площадка с камерой не должна заваливаться вправо или влево по оси Roll, т.е. центр тяжести должен проходить через ось мотора Roll
3) вся нижняя часть рамы вместе с камерой должна быть уравновешена по оси Yaw. Для регулировки у меня используются два зажима, позволяющие сдвинуть мотор и площадку с камерой вперед-назад.
Настройка электроники
Важно проверить правильность подключения всех компонентов, проверить чтобы не было обрывов цепи, плохих контактов. Также на кабель датчика рекомендую поставить ферритовый фильтр. И размещать его подальше от других. На практике самую сильную наводку давал видеокабель от камеры к выносному монитору. В первой версии я хотел на один кабель подключить датчик и пару свободных контактов подключить на видеосигнал, но наводка полностью сбивала гироскоп, в итоге все реализовано отдельно.
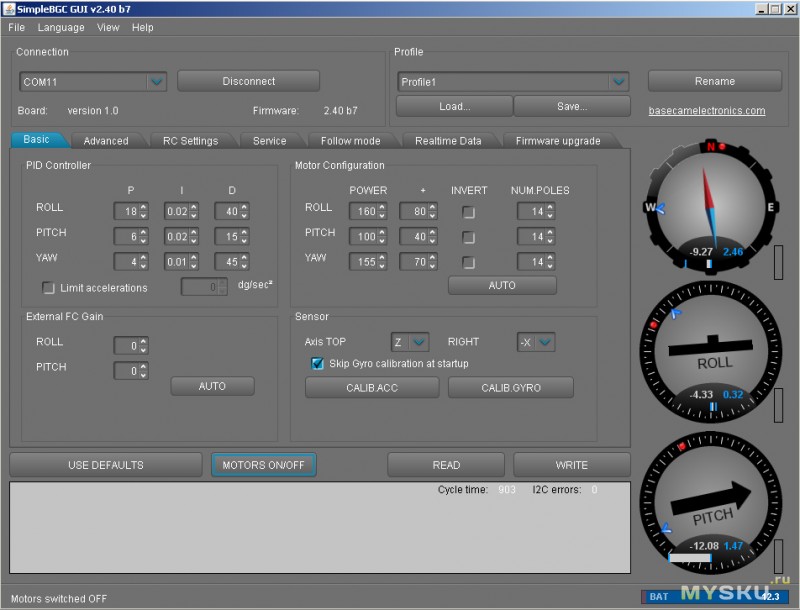
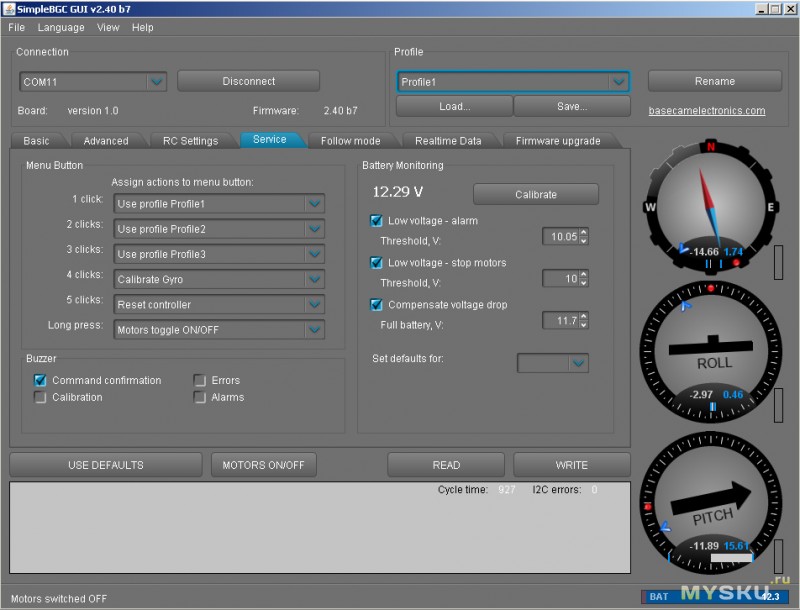
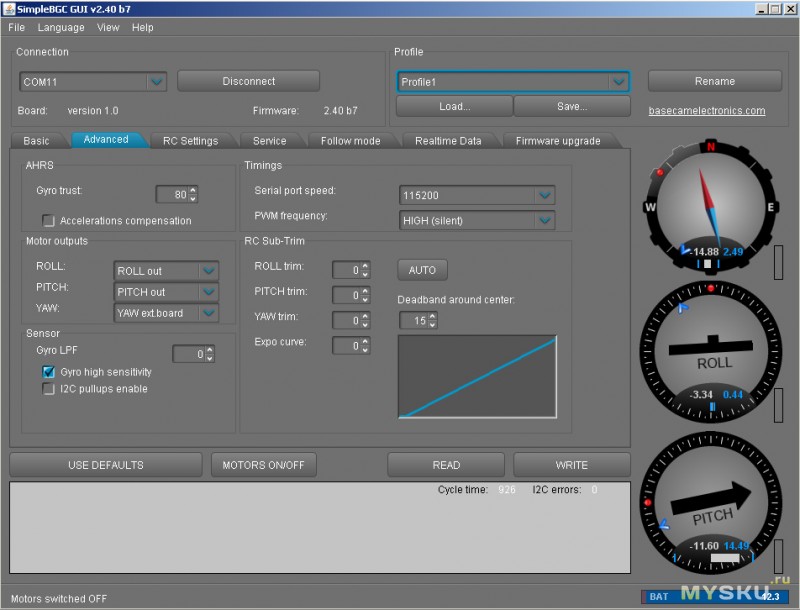
Скриншоты моих настроек
Далее следует настройка через USB в специальной программе. Не подключайте подвес на USB в выключенном состоянии, т.к. он попытается запитать моторы от 5 Вольт порта и могут слететь настройки контроллера. Настройка PID на 8-битной плате — это довольно долгое занятие, которое сложно описать последовательно, т.к. процесс больше похож на интуитивное ощущение изменений. Вкратце: P — делитель мощности импульсов, I — интервал импульсов, D — длительность серии импульсов. Это определение не совсем правильное, в оригинале параметры обозначают немного другое, но такое описания я составил для себя, как более удобное для понимания. Грубо говоря, если двигатель не может повернуть площадку, то добавляем ему мощности в полях Power и уменьшив делитель Р. Если двигатель дрожит, гудит или входит в резонансное колебание — регулируем I, если происходят срывы в момент доворачивания площадки, то пробуем увеличить D и динамическую мощность в поле + (возле Power). Последняя очень полезна для экономии батареи, дополнительная мощность подается только в момент резкого поворота и контроллер имеет запас для избежания срывов при резких движения. В обычном состоянии контроллер использует просто значение Power. Также рекомендую в закладке Settings выставить поддержку постоянного напряжения и значение напряжения, при котором отключаются двигатели. Без этого есть большая вероятность сброса настроек в случае сильной просадки напряжения.
Небольшое видео со стороны:
Итоги
Видео, снятое с помощью этого стабилизатора, камера Canon 550d 18-55.
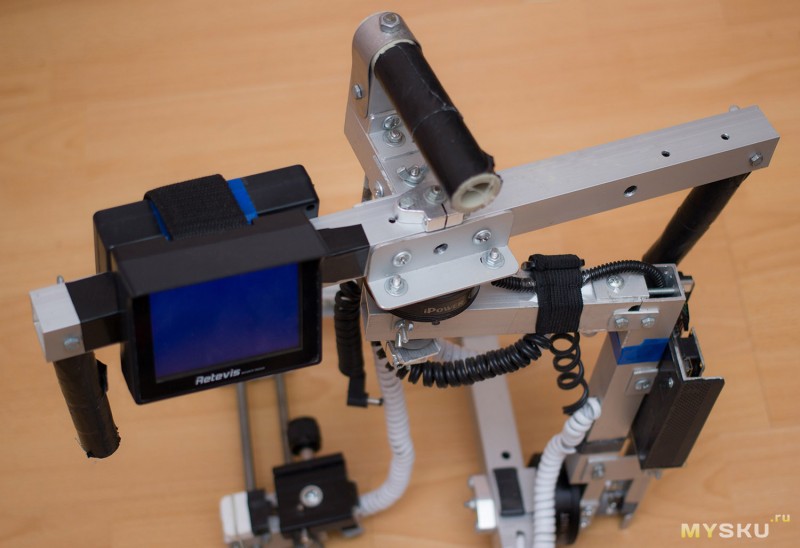
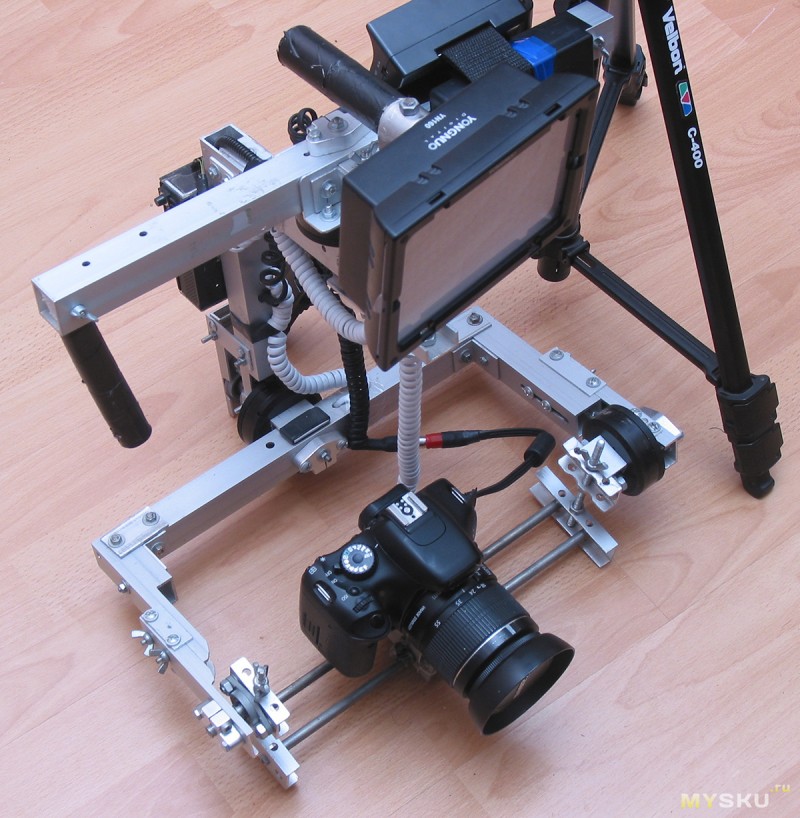
Стабилизатор в сборе (штатив просто для опоры)
Стедикам получился тяжелым, около 4 кг без камеры. С непривычки первый раз было нелегко, рекомендую в качестве приспособления для физических упражнений. Качество стабилизации не сравнится с обычным механическим стабилизатором. Даже при далеко не идеальной конструкции и настройке картинка более стабильна, уверенно держит горизонт. Переключение профилей позволяет снимать в разных режимах. Однако это не оборудование «работающее из коробки». Нужно учиться им пользоваться, даже чувствовать, так как, например, слишком резкий поворот может продавить сопротивление двигателя и прийдется перезапускать контроллер для возврата к нормальной работе. Разумеется, можно увеличить мощность двигателей, но это уже потребует и более мощной батареи.
p.s. Предвидя ряд сложных вопросов, я не занимаюсь изготовлением на заказ, не знаю про другие моторы и другие типы контроллеров. Все знания и опыт касаются только этого конкретного экземпляра. Для тех, кто имеет финансовую возможность — настоятельно рекомендую Dji Ronin — аккуратненький заводской аппарат, очень удобный, которым можно пользоваться почти с коробки, www.dji.com/product/ronin
| +46 |
17878
42
|
Самые обсуждаемые обзоры
| +15 |
1821
53
|
| +54 |
1577
36
|
По облегчению конструкции можно порекомендовать только фрезеровку / резку пластика — уйдут болты и уголки, но из хорошего пластика будет дорого, увы.
P.S. Кто не в курсе про Ронин — эта штучка в сборе обойдется в 2500$ — т.е. примерно 145000р.
P.P.S. Есть совсем не дорогой биологический вариант — любой представитель семейства куриных, но проблемы с креплением и весом камеры :D
У меня такой-же недостаток в поделках — вес — ибо все на кронштейнах с болтиками.
Кстати, не смотря на кустарное производство у Вас это вышло очень даже акууратно, тем более для первого прототипа.
Знакомый парнишка увлекается фото, видео и делает эти стедикамы под названием кинематик.
Может кому пригодиться:
www.kinematik.pro/
Такой же хочу сделать, только максимально компактнее,
думал сам лепить гироскоп/акселерометр к стм, а оказывается готовые платы и софт есть, спасибо большое!
Зачет!
Нет возможности оперативного управления настройками или хотя-бы профилей?
Система «Стэдикам» изобретена кинооператором Гарретом Брауном, который 12 апреля 1977 года получил патент США на изобретение под названием «Оборудование для использования с ручными кинокамерами». Появление «Стэдикама» произвело такое впечатление на кинематографистов, что в 1978 году Гаррету Брауну был присуждён Оскар за технические достижения.
PS Ваш обзор хорош, но это не стэдикам ) В видео (если не ошибаюсь) нет моторов и батарей, только механика с балансирами, противовесами и пружинами.
Да, в «Чужих» именно стидикамы «ГБ» и испльзовались под «МГ-42».
Джон Уорд:
Меня никогда не приглашали работать над «Aliens», поскольку я уже был занят работой над «Full Metal Jacket». Над «Aliens» начинал работать другой человек — Иэн Пестер. А мне просто однажды позвонили и сказали, что там какой-то Джеймс Кэмерон на другом конце провода. Я сказал: «На свете есть только один Джеймс Кэмерон»! Его жена в то время вела все его дела, кажется, она была продюсером. Ну, в любом случае, я взял трубку, и Джим спросил, что я думаю по поводу того, чтобы соединить пулемет и steadicam… По-моему, я говорил с ним об этом два раза, а потом поехал в «Пайнвуд», чтобы посетить декорации. Рукояти и жилеты, которые использовались для создания оружия Васкез и Дрэйка, являлись моделями «Cinema Products Mk III». Я привез их непосредственно для производства «Aliens». Один был, кажется, номер 325, а другой — 286. Я принес их в «BAPTY», надел это устройство и этот парень положил пулемет на рукоять…
Им пришлось добавить дополнительный вес, так как эта конструкция не была сбалансирована, поскольку пулемет весил меньше, чем стандартная видеокамера. Затем они сделали несколько фотографий меня в этом оборудовании, хотя я их так никогда и не увидел. После съемок эти устройства вернулись ко мне не совсем в таком же хорошем состоянии, какими я их отдавал. Одно было в порядке, а со вторым возникли проблемы — актриса была для него слишком маленькой, и его пришлось обрезать, позже они это мне компенсировали. После съемок я продал оба устройства. Один полный образец отправился к Винсу МакГэхону в Йорк, а рукоять второго ушла каналу новостей Channel 5 News, в то время как жилет от него был так сильно поврежден, что был уже никуда не годен. Кажется, наушники ушли Найджелу Кертану, наверно у него также есть и броня.
Вот здесь еще интересно: http://nnm.me/blogs/sharion/oruzhie_v_kino_nastoyawee_i_vymyshlennoe/
По сабжу- афигенно, молодец!
www.youtube.com/watch?v=ecXBLlrqwTk
Если «копия» шьется всеми прошивками и визуально 1 в 1 как оригинал, то может это все-таки оригинал?
Там много полезного можно подчерпнуть, в рунете крупнее обсуждения не видел.
А вы стабилизация… Лежит стабикам (стедикам) за 16 тыс. уже три года без дела, не юзанный. Баловство.
Я думал, ангелочки отжили свое лет 10 назад.
А сейчас наоборот всем подавай два марк 3, стедикам и цветокоррекцию под кино.
www.basecamelectronics.com/simplebgc32bit/
вот за 13 баков — www.goodluckbuy.com/bgc-3-1-mos-large-current-two-axis-brushless-gimbal-controller-with-the-smallest-sensor.html
но то 2-х осевая, там и 3-х есть, не думаю что силньо дороже, лень искать.
подвес простенький под гоупро у них 50 стоит. готовый.
едиственно он 2-х осевой. потом при экспериментах спалил основную плату, заказал новую….по ссылке выше. все рабоатет. на плате новой с обратной строны как раз маркировка с фразой: Alexmos + V2.3B5
ну в общем не знаю…