Два 3,81 OLED HDMI дисплея для VR или DIY, с разрешением 2160x1200 и 90 Гц

- Цена: $163.84
- Перейти в магазин
Всем привет, сегодня я бы хотел немного рассказать о 3,81 дюймовых OLED HDMI дисплеях, с общим разрешением2160 на 1200 пикселей и частотой обновления 90 Гц. HDMI дисплей имеет хорошее разрешение, высокую частоту обновления и минимальный отклик, благодаря чему этот дисплей хорошо подходит для самодельного VR шлема.
Пришел дисплей в такой коробке.
Внутри две пластиковых коробки, обернутые в пупырку.


В комплекте имеется: два 3,81 дюймовых OLED дисплея, HDMI плата, шлейф на 14,5 см, а также плата с разъемом под дисплей.
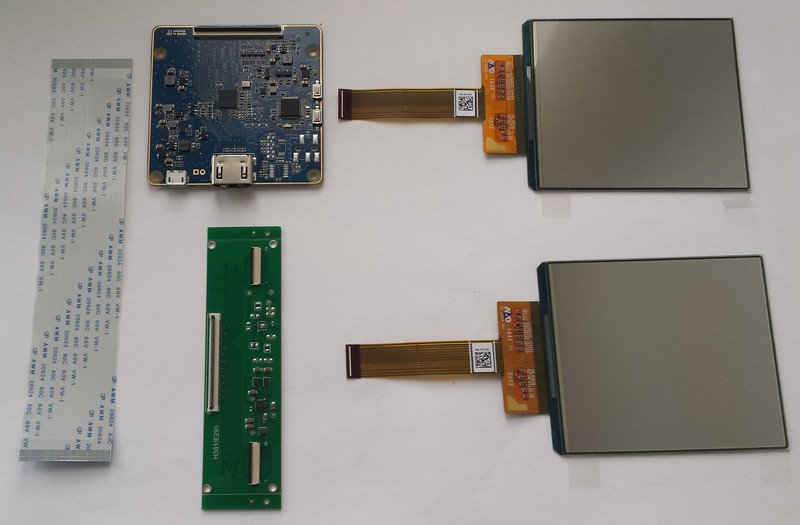
На плате используется HDMI декодер Toshiba 358870XBG, а также микроконтроллер STM32F103. На плате имеется 2 кнопки, первая никак не задействована, а вторая переключает режимы дисплея: дублирование дисплеев, с разрешением 1080 на 1200 и единый экран, с разрешением 2160 на 1200. Аудио разъем и другие компоненты под аудио, к сожалению, не распаяны, а для VR шлема он был бы очень кстати, чтобы избавиться от лишних проводов.

• Общее разрешение дисплеев:: 2160 на 1200;
• Частота обновления экрана: 90 Гц;
• Тип матрицы: OLED;
• Яркость: 100 кд/м2;
• Размер дисплея: с рамкой: 6.8 на 7.9 см, без рамки: 6.45 на 7.27 см;
• Общий размер: с рамкой: 13.5 на 7.9 см, без рамки: 13.1 на 7.27 см (с черной полосой рамок посередине);
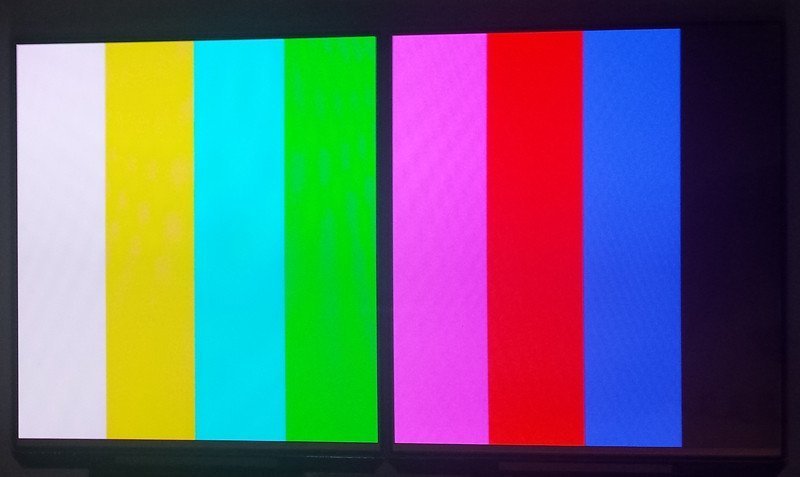
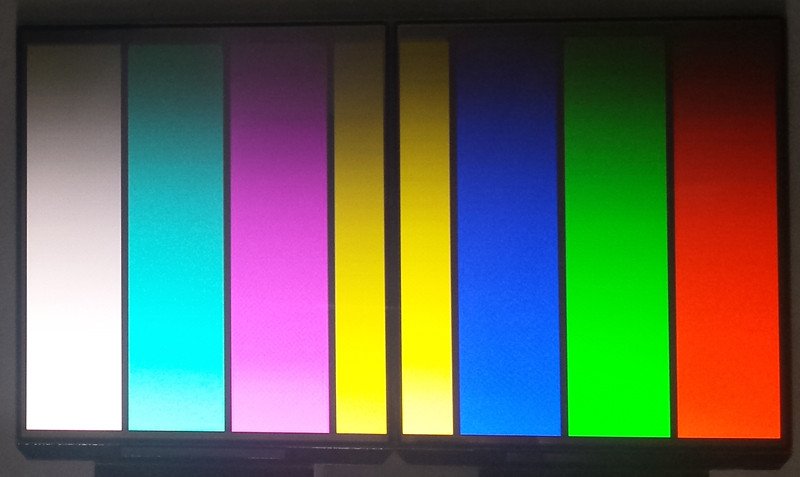
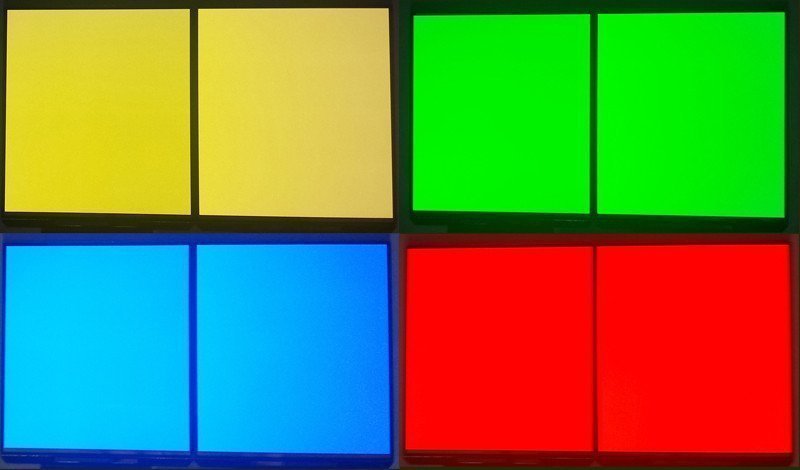
Дисплей имеет хорошее разрешение — 2160 на 1200 и выдает очень четкую, яркую, насыщенную картинку.

Какого либо мерцания на ярких изображениях нет.

Каких-либо битых пикселей на дисплее нет.
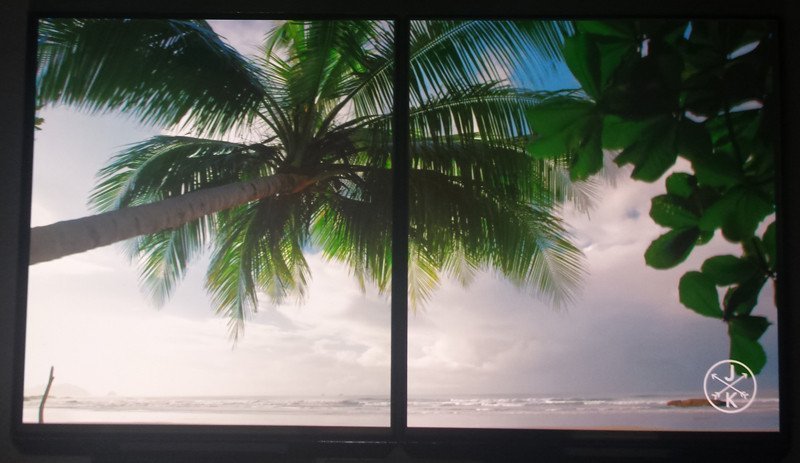

Благодаря высокой частоте обновления картинка очень плавная.



Цвета яркие, сочные.
Дисплей можно смело рекомендовать к покупке и использованию.
Спасибо за внимание.
Пришел дисплей в такой коробке.
Внутри две пластиковых коробки, обернутые в пупырку.
В комплекте имеется: два 3,81 дюймовых OLED дисплея, HDMI плата, шлейф на 14,5 см, а также плата с разъемом под дисплей.
На плате используется HDMI декодер Toshiba 358870XBG, а также микроконтроллер STM32F103. На плате имеется 2 кнопки, первая никак не задействована, а вторая переключает режимы дисплея: дублирование дисплеев, с разрешением 1080 на 1200 и единый экран, с разрешением 2160 на 1200. Аудио разъем и другие компоненты под аудио, к сожалению, не распаяны, а для VR шлема он был бы очень кстати, чтобы избавиться от лишних проводов.
Характеристики:
• Модель дисплеев: AUO H381DLN01;• Общее разрешение дисплеев:: 2160 на 1200;
• Частота обновления экрана: 90 Гц;
• Тип матрицы: OLED;
• Яркость: 100 кд/м2;
• Размер дисплея: с рамкой: 6.8 на 7.9 см, без рамки: 6.45 на 7.27 см;
• Общий размер: с рамкой: 13.5 на 7.9 см, без рамки: 13.1 на 7.27 см (с черной полосой рамок посередине);
Тесты:
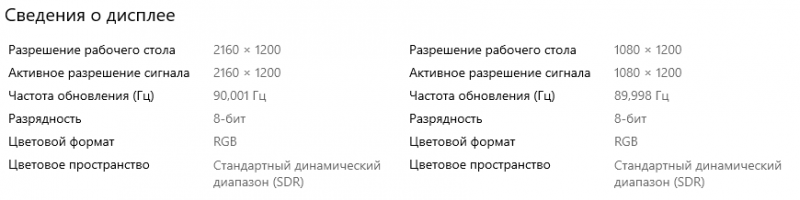
Дисплей имеет частоту обновления 90 Гц и может работать в двух режима: дублирование картинки на два дисплея, с разрешением 1080 на 1200 и единое изображение, с разрешением 2160 на 1200.Дисплей имеет хорошее разрешение — 2160 на 1200 и выдает очень четкую, яркую, насыщенную картинку.
Какого либо мерцания на ярких изображениях нет.
Каких-либо битых пикселей на дисплее нет.
Благодаря высокой частоте обновления картинка очень плавная.
Цвета яркие, сочные.
Итого:
В целом получился хороший дисплей, с хорошим разрешением и плавной картинкой в 90 Гц, который можно использовать для различных самодельных VR шлемов. Дисплеи имеют более быстрый отклик, в сравнении с IPS экранами.Дисплей можно смело рекомендовать к покупке и использованию.
Спасибо за внимание.
Самые обсуждаемые обзоры
| +48 |
3068
103
|
| +91 |
7550
75
|
| +38 |
1638
26
|
| +19 |
1593
35
|
Я ждал как минимум:
VR подразумевает 2 разные картинки(стерео).
Здесь этого в помине нет?
Что значит от запущенной и куда запущенной?
Ну и в целом обзор выглядит как «у меня для вас есть посылка, но я вам её не покажу». С таким же успехом можно сказать что дисплей отлично подойдет для сборки самодельного марсохода.
До странного бесполезная штука
Вот если бы на каждый дисплей можно было подавать свое изображение — была бы весчь реально крутая для стереовиденья
Ну а если клеить два изображения в одно то проще и дешевле и отображать на одном экране типа смартфона.
Смысл?
Глупость пишете
А если уж на то пошло то лично могу синхронизовать сигнал хоть с 50 источников с точностью 0.2-0.4 миллисексунды. Ваш экран правда такую точность не отобразит — я делал для робототехники
А, во-вторых, по секрету скажу — клеить ничего не надо, т.к. никто и никогда не рендерит напрямую в экранный буфер. Пока вы на экране видите текущий кадр, следующий подготавливается в памяти, после чего видеокарта просто переключается на его отображение (без копирования), если, конечно, речь идет о полноэкранном режиме. Это называется double buffering и известно, наверное, со времен того самого 2д-wolf, который был до Doom 1.
Так вот, что мешает мне установить такие параметры видеобуфера, чтобы он физически соответствовал левой половине экрана? Правильно, ничего. Таким образом, пока вы видите текущий кадр, карта сможет нарисовать левую половину следующего. Затем она нарисует правую, после чего переключит отображаемый буфер и займется подготовкой следующего кадра.
Более того, современные 3д-движки могут внутри рендерить в картинку большего размера, после чего «сжимать» до экранного для повышения качества. В этом случае копирование вообще оказывается «бесплатным». Также, после рендеринга может идти несколько проходов пост-процессинга, которые, опять-таки, сами по себе копируют данные в другой буфер.
Это и делает картонная «приставка» виртуальной реальности за 100+ рублей. Только в этом случае тяжело экран разделять качественно, чтобы каждый глаз видел свою половину и только её, да под нужным углом и т.д. Если захотите сделать свои VR-очки, рано или поздно придете к отдельным экранам для каждого глаза. Только заводить при этом на каждый экран отдельный сигнальный интерфейс — по меньшей мере глупо.
Во первых более чем
>> В 2022 году, когда филрейт видеокарт достигает сотен гигапикселей
А во вторых назовите мне «сотнегигапиксельную видеокарту» одноплатного компьютера которую можно встроить в очки или шлем чтобы полетать в поле на дроне.
>> Пока вы на экране видите текущий кадр, следующий подготавливается в памяти,
В третьих В какой еще бредовой памяти он подготавливается если камеры стоят на летящем дроне, а стереоочки у вас на на носу?
>> заводить при этом на каждый экран отдельный сигнальный интерфейс — по меньшей мере глупо.
Не заводить и склеивать два изображения в одно еще глупее
Если же перейти на предметную области «дронов», то как вы собираетесь передавать изображение с летательного аппарата? Наверное, будете какое-то цифровое сжатие использовать, иначе 1080p передавать попросту нереально. Так вот, декодирование видео происходит точно так же в дополнительный буфер. И ничто вам не мешает декодировать его только в половину кадра. Без какого-либо лишнего копирования.
Да даже если и аналог будете оцифровывать и апскейлить — все равно его в буфер сохранять надо, поэтому нет разницы, растягивать его на целый экран или только на половину. Опять же, никаких лишних ресурсов.
Так что не придумывайте тут.
Если у вас есть компьютер за 200 тыс рублей и к нему видеокарта за 150 тыс рублей для игр то нужно быть идиотом чтобы вместо готового oculus покупать на алиэкспрессе некий шлак который затем нужно самому паять и собирать из овна и палок к нему корпус и линзы.
Паяйте ога ога :)
Но, в целом, наверное, замечание справедливое, хотя ситуации разные бывают. Кто-то может брать чтобы «поиграться» с конструкцией, кто-то еще для чего-то.
Имхо для дрона это сложное решение, т.к. требует много сложных узлов типа цифрового кодировщика видео, широкополосного передатчика, приемника и декодера. Для дрона проще было бы иметь экранчики с меньшим разрешением и аналоговыми входами.