Гироподвес на две оси Brushless PTZ Gimbal для камеры квадрокоптера

- Цена: $49.99
- Перейти в магазин
Гироподвес с контроллером для камеры на MJX Bugs 3.
В обзоре будет информация об установке подвеса на квадрик, плюс модели адаптера (для 3д печати), а также бонусом модель крепления подвеса к селфипалке (аля бюджетный стедикам).
2Axis Brushless PTZ Gimbal Camera Mount — недорогой и простой двухосевой подвес для камеры на р/у технику. Чаще всего такое устанавливают именно на мультикоптеры — именно из-за удобства (малый вес и габариты). Можно подвешивать не только экнш-камеру для записи полетов, но и FPV камеру — гораздо комфортнее пилотировать.

Для чего нужен подвес — все просто. Подвес стабилизирует рамку с камерой относительно притяжения земли и удерживает это положение. Причем при каждом включении он устанавливает баланс рамки (center-of-gravity posttion) с установленной камерой (либо пустой), причем масса камеры может быть различная (в пределах до 70 г). В полете это положение удерживается непрерывно за счет компенсации отклонений движениям моторчиков. В данном модели предусмотрена компенсация по двум осям, в более дорогих — по трем. Также на плате контроллера присутствует вход внешнего сигнала отклонения камеры Pan/Tilt — управление наклоном и поворотом камеры по требованию. Заданное положение будет также стабилизироваться.
Более дешевые модели, кстати, идут без контроллеров — только рамки с двигателями. Докупать контроллер нужно будет отдельно. А в обозреваемой модели все все есть + в комплекте есть провода для подключения и установочный комплект (винты, стойки).
Особенности: черный и металлический (серебристый) фрезерованный алюминиевый каркас.
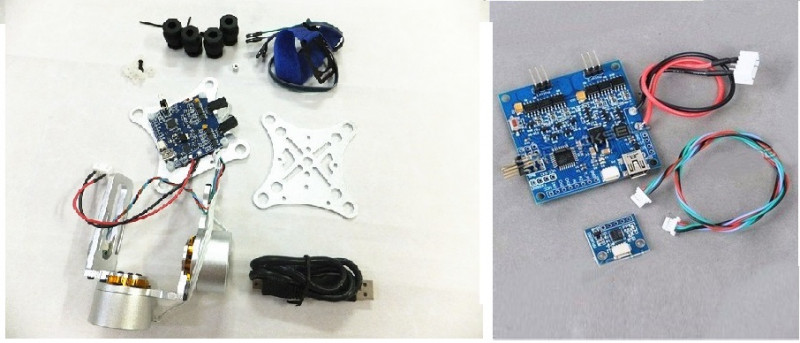
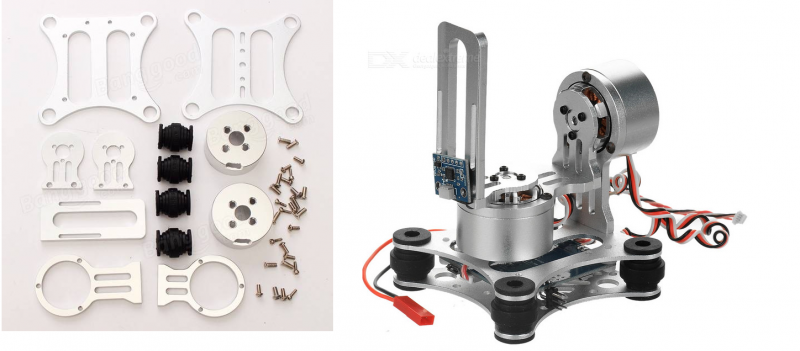
Особенности данного подвеса: простая и прочная конструкция и небольшой вес из-за применения фрезерованных алюминиевых деталей. Использование в качестве приводов бесколлекторных двигателей также повышает надежность и уменьшает вибрации самого подвеса. Дополнительно установлены резиновые амортизаторы. На подвесе установлен контроллер, плюс плата гироскопа. Нужно просто подать на него питания — и он начнет работать.
На фотографии представлены все комплектующие подвеса. Обратите внимание на четыре резиновых амортизатора — дополнительная защита от вибраций корпуса мультикоптера.
Характеристики:
— Type: PTZ Gimbal
— Axis: 2 axis gyro, brushless gimbal driver
— Flight controller: BGC
— Weight: 230/300gram with/without Gopro hero 3
— Compatible camera: Gopro hero camera( not included)
— Sensor: GY6050
— Power: 1A DC-DC LDO module
— Peak current: 10A
— Interface mini USB/IIC interface
— Firmware: Alexmos V2.3B5 (Updated from BGC3.1 by GLB).
— Battery plug type:JST plug
— Voltage:12V
Упаковка и комплект.
Пришло в коробке, картонной, просторной))))

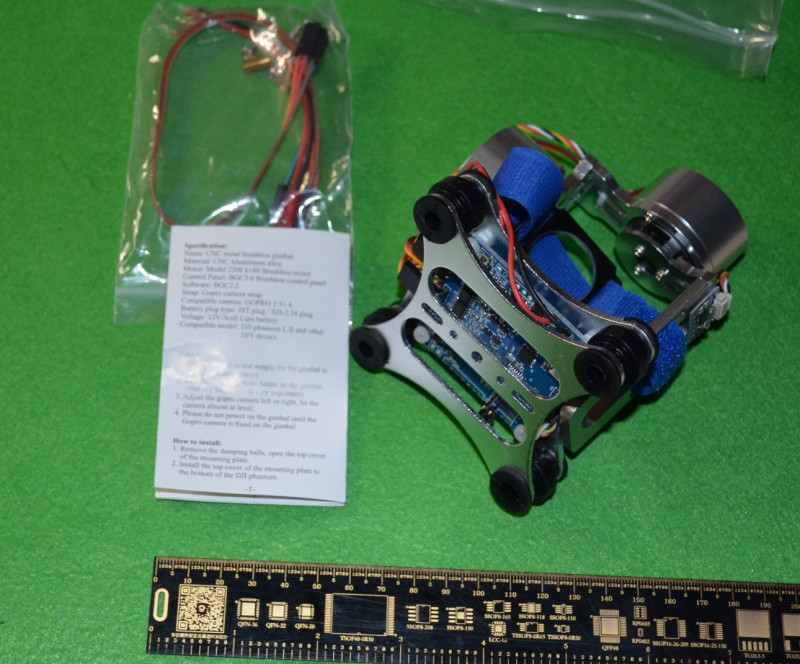
Внутри комплект: подвес в сборе, инструкция.
Провода: несколько проводников (типа Dupont), плюс JST plug для пайки (хвостик). На плате припаян штекер JST. Монтажный комплект — четыре латунных стойки М3 и 8 крепежных винтов к ним.

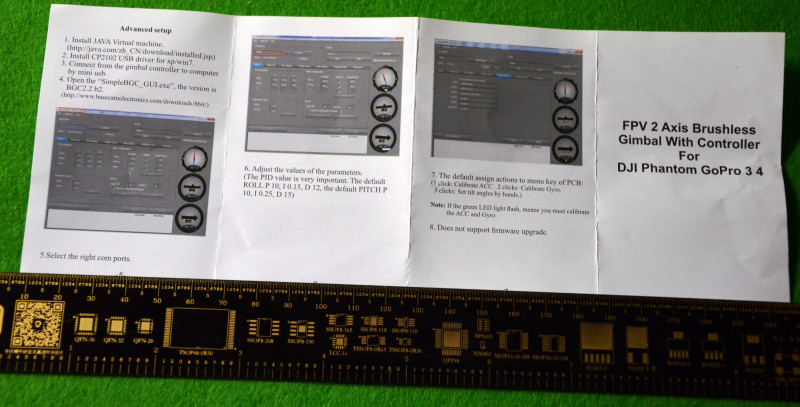
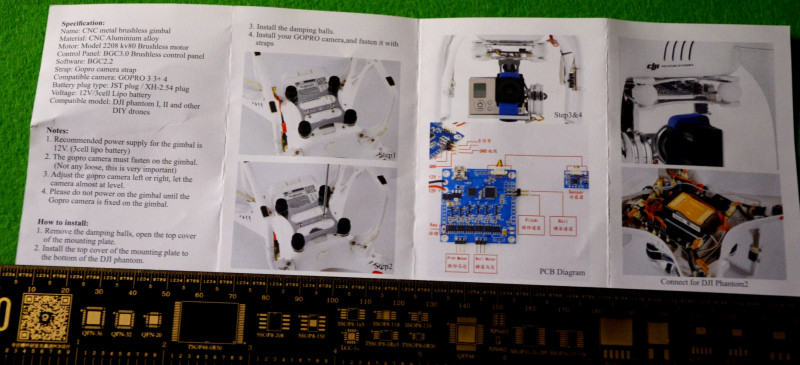
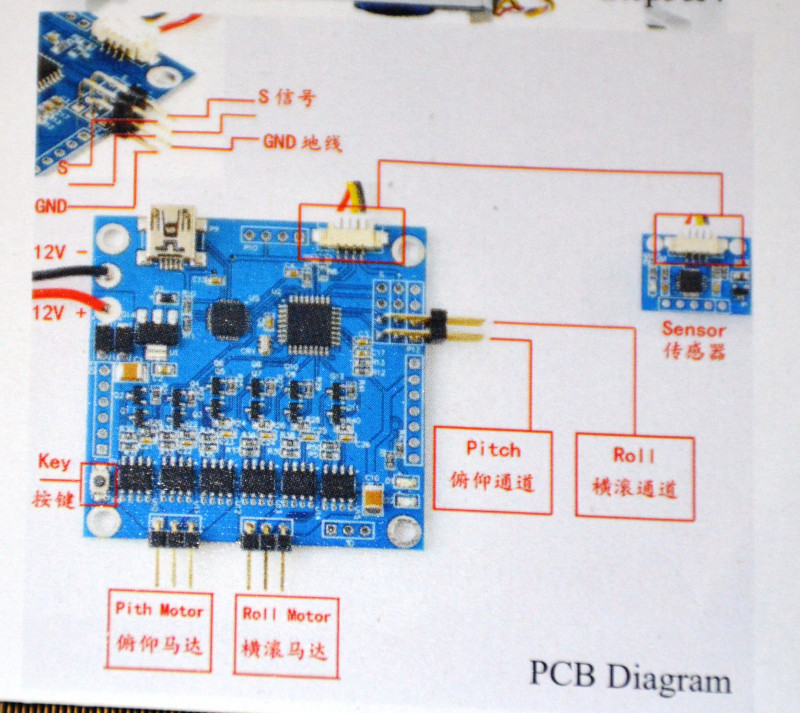
На всякий случай фото инструкции
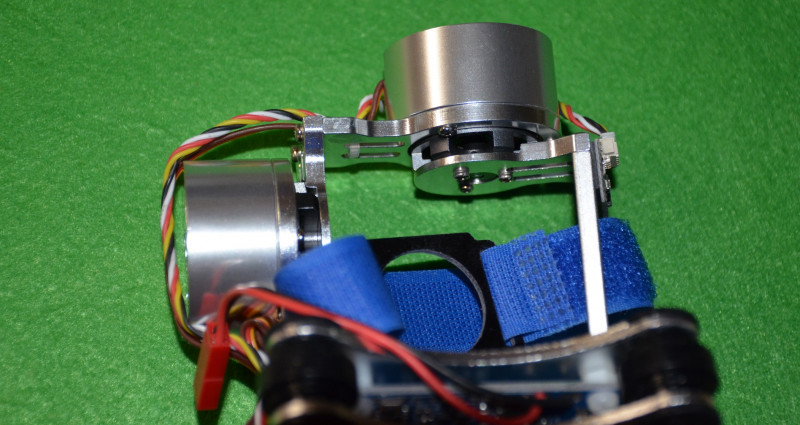
Внешний вид гироподвеса.
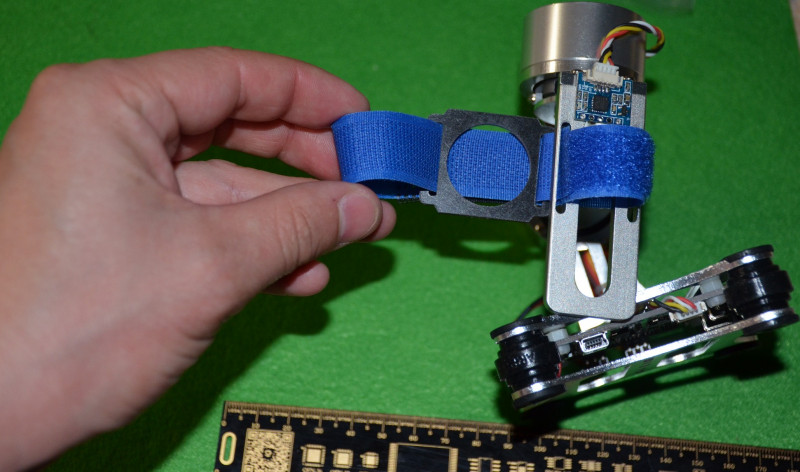
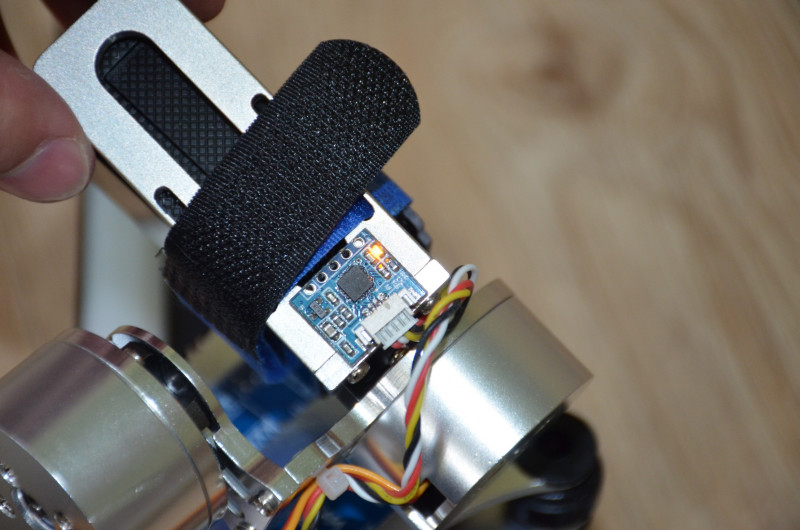
Как я уже сказал, подвес полностью собран и готов к работе. Камера фиксируется специальной липучкой с окошком *(на фото синего цвета).
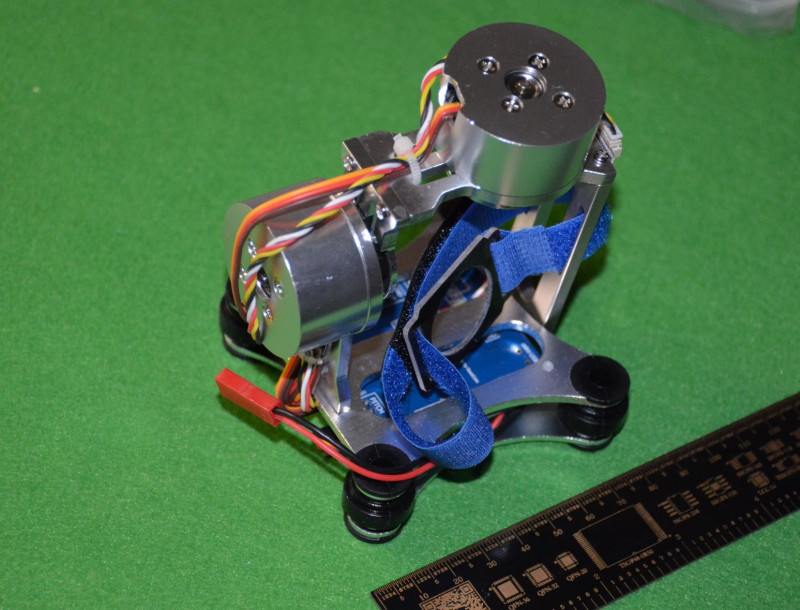
Двигатели в металлических корпусах — это одновременно и прочность, и неплохой отвод тепла.

Две оси — две рамки с двигателями. На первой рамке закреплена вторая рамка со вторым двигателем и креплением камеры.
В основании установлены амортизаторы. Вообще цвет амортизаторов может отличаться от партии к партии. А также встречал крашеные алюминиевые рамки.

По железу — используются бесколлекторные двигатели типоразмера 2208 (без маркировки), а вот с контроллером интереснее.
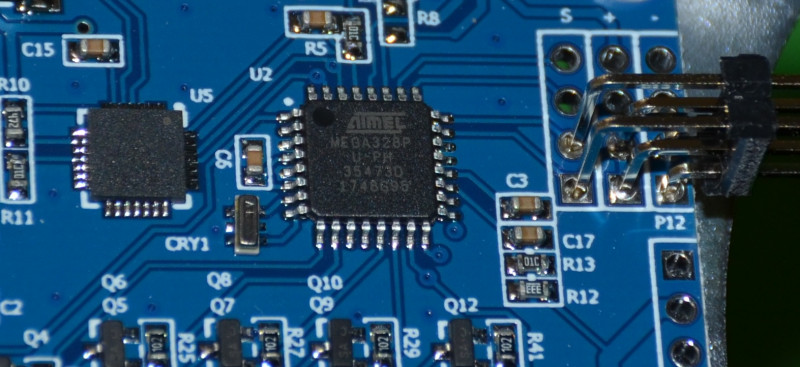
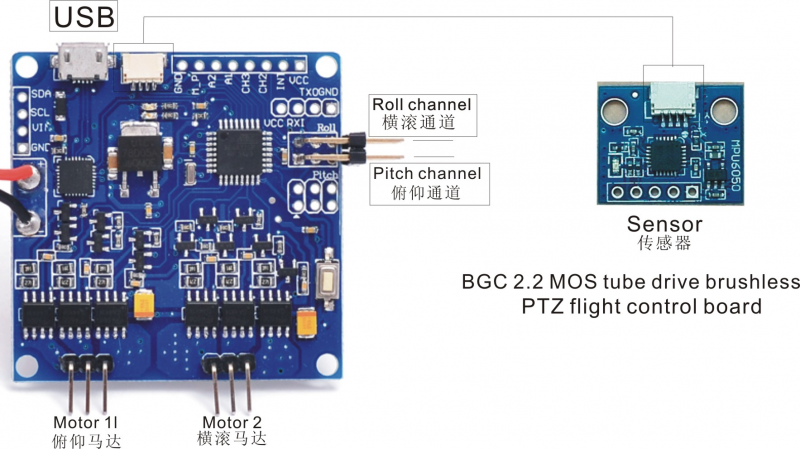
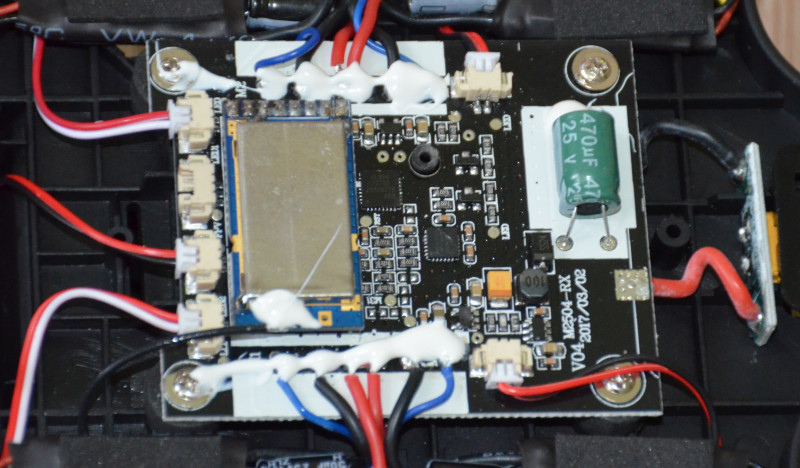
Контроллер SimpleBGC Gimbal Controller сделан на Атмега328. Прошивка доступна, можно отредактировать PID (по ссылке SimpleBGC _GUI_2_2b2 gimbal controller.
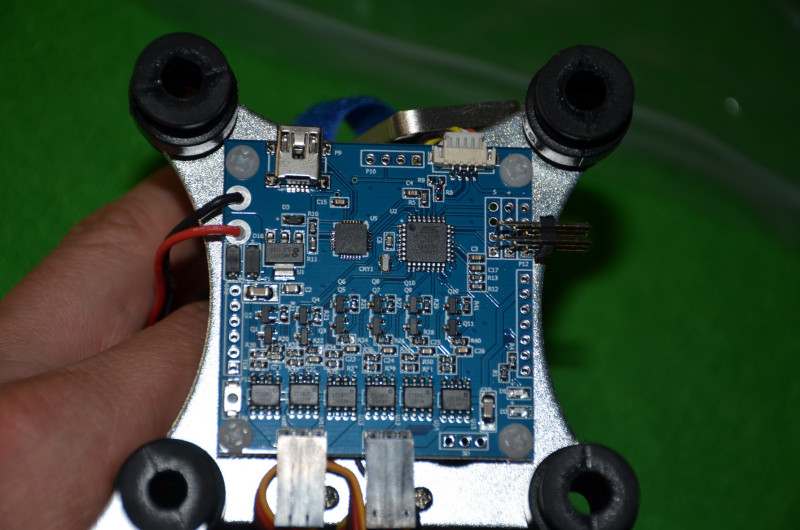
На плате видны диоды Шоттки (SS14), стабилизатор AMS1117, справа два входа установки угла Pan/Tilt
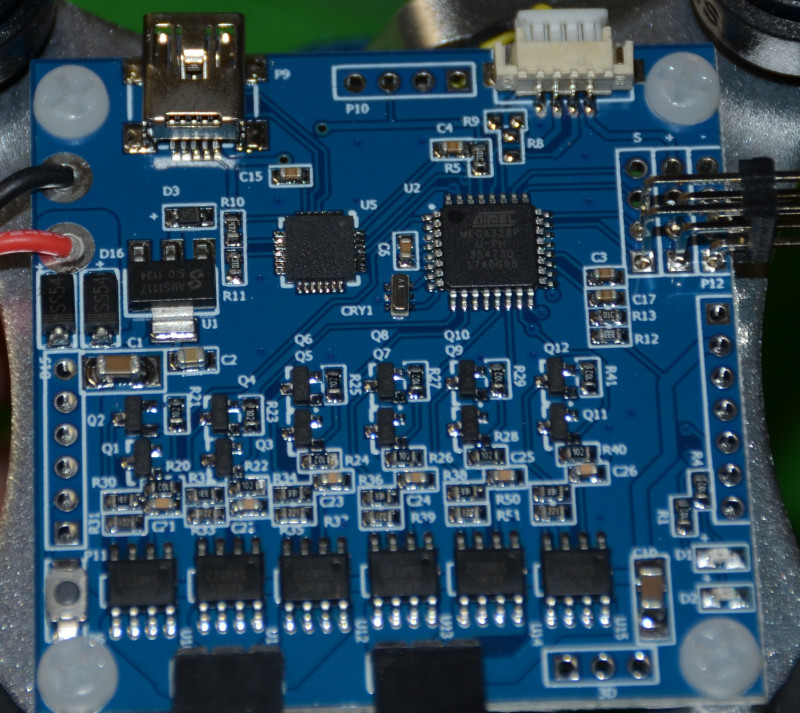
Мега крупным планом. Слева от меги стоит преобразователь CP2102 — подключен к шине USB.
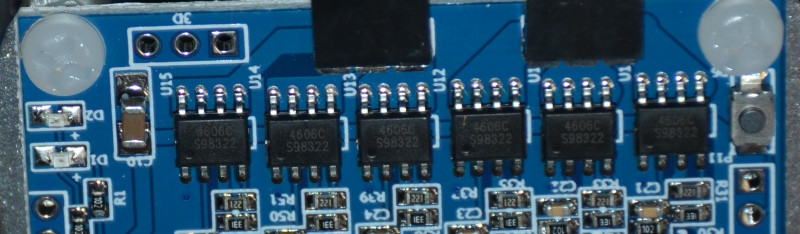
Выходы на двигатели запитаны через группу мосфетов 4606С (N-CHANNEL 60V/7.5A SO-8 STripFET POWER MOSFET)
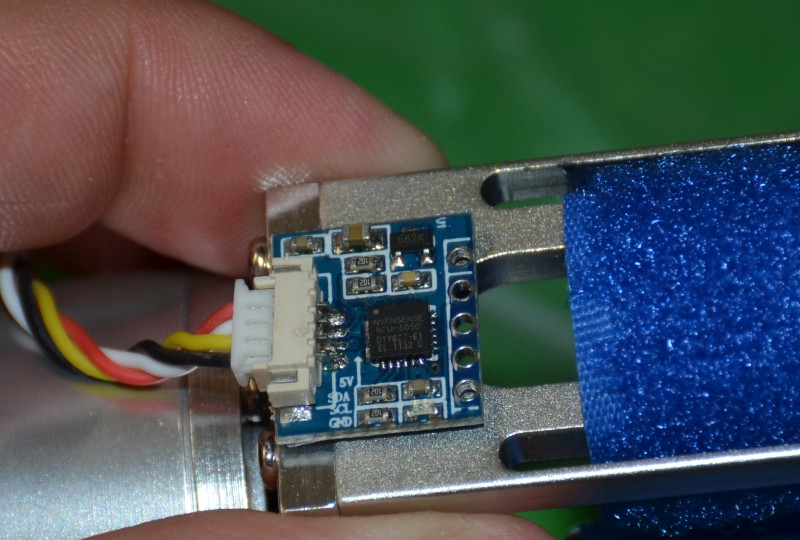
Маркировка акселерометра: INVENSENSE MPU-6050 DIY 627-E1 — Motion Processing Unit MPU-6050 на базе 3-осевого МEMS гироскопа.
Установка камеры.
Порядок установки простой. Сначала нужно расцепить резиновые амортизаторы-бочонки, и получить доступ к верхней крышке. Установить крышку на корпус мультикоптера, при необходимости можно использовать латунные стойки. Крепеж из комплекта (М3), но я использовал свой по месту.
Далее, устанавливаем обратно к крышке подвес и резиновые амортизаторы.
Крепим на липучку камеру.
Если есть дополнительно каналы на мультикоптере для управления камерой (Pan/Tilt), то можно подключить и их.
Небольшое примечание — сначала закрепите камеру на подвесе (и естественно — подвес на квадрике), и только потом подавайте питание. Иначе квадрик «запомнит» холостое положение, которое после установки камеры изменится, подвес начнет дергаться и т.п. То же самое касается установки камеры без аккумулятора — масса аккумулятора будет также влиять. Так что сначала установка, потом питание.

Для подключения питания подвеса нужно вывести от батарейки мультикоптера хвостик с JST. Подвес работает от 2S (7.4V), но желательно использовать 3S батареи (11.1V), в спецификации указано про 12В.
На плате, кстати, находится аппаратная кнопка — она будет нужна для установки положений и регулировки PID.
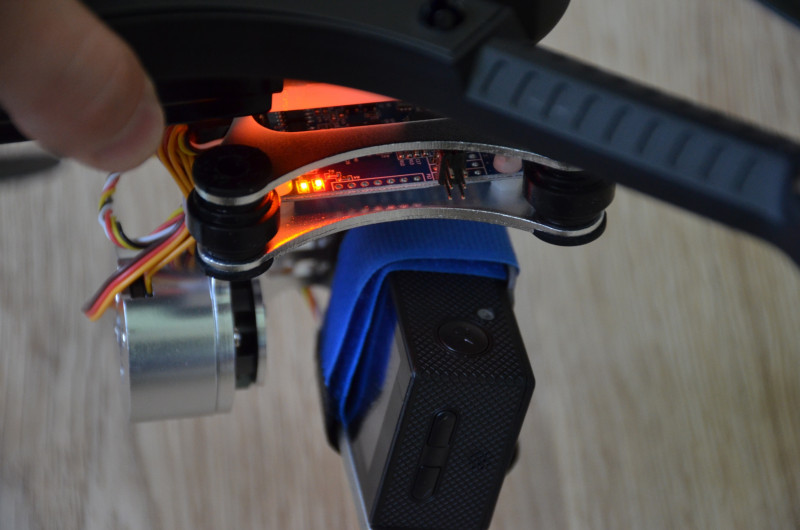
Пробуем подать питание — загораются светодиоды на плате контроллера и плате акселерометра.
Работа подвеса при питании — постепенно выходит на режим, при закритичных отклонениях начинается вибрация, если совсем перебор или превышение усилия (заклинивание), то двигатели временно отключаются.
Масса с камерой и адаптером в пределах 300 г. Лучше не превышать это значение.
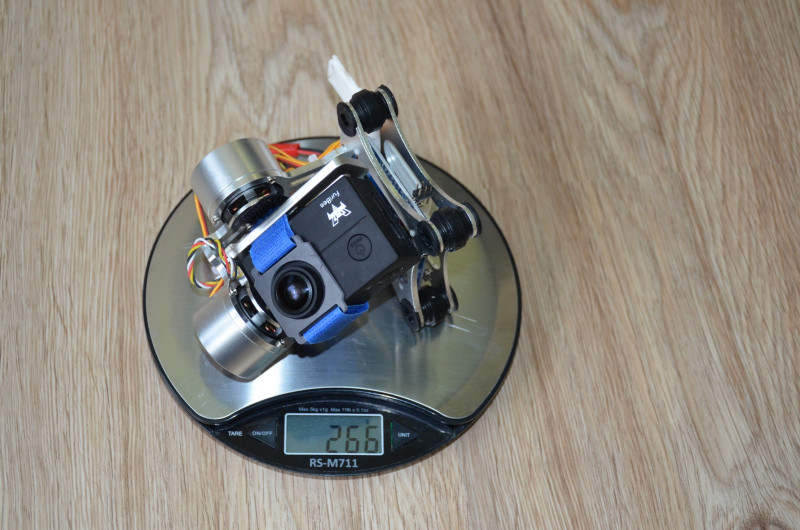
Отдельно подвес весит около 200 г. На фото подвес + адаптер.

Дальше стояла задача закрепить подвес на корпусе квадрокоптера, а конкретно — на неплохом бюджетном бесколлекторнике MJX Bugs3.
Будет несколько скринов, из разряда «как нарисовать сову».
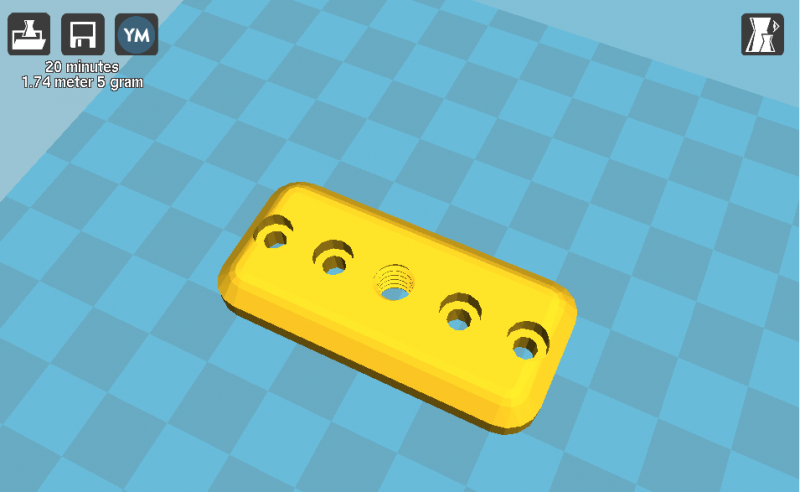
Мне пришлось по размерам посадочного места в квадрике (там сложная форма с замком) и крепления на подвесе (5 отверстий Ø3 мм, шаг 10 мм) рисовать с нуля адаптер для крепления. Примерно раза с третьего получилось сделать крепление.
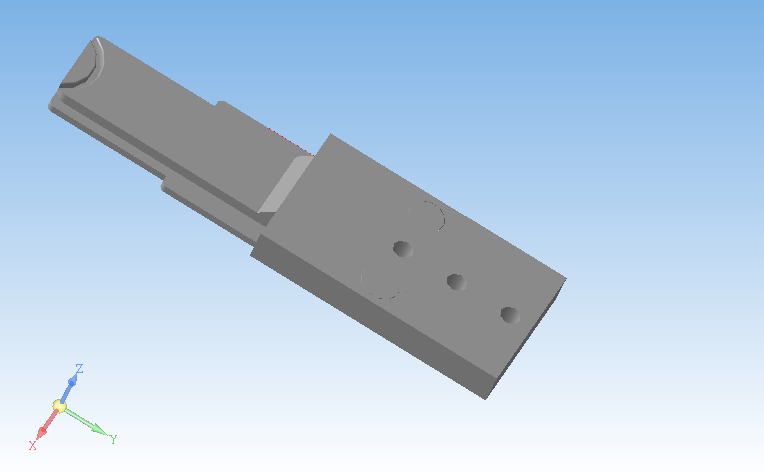
Естественно, все это проще сделать методом 3Д печати — дел на 20 минут и три копейки.
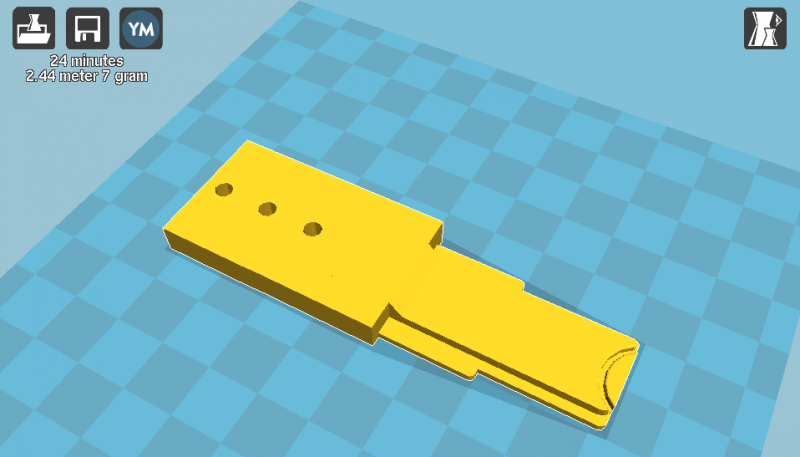
Особенно долго «попадал» в размеры замочка на корпусе квадрика. Зато подвес сейчас быстросъемный.

Получается достаточно неплохо.

Установленный адаптер на квадрик.


Для демонстрации подвеса попробовал сделать несколько видеороликов (будут гифки).
Наклоны квадрика из стороны в сторону подвес отрабатывает быстро))))

Будет вид сбоку. Квадрик наклоняется вперед и назад.
Хорошо видна стабилизация рамки с камерой.

Чуть усложнил задачу.
Наклоны по двум осям.
Камера остается в одном и том же положении.
Единственно — меняется высота. То есть на видео будет заметно перемещение вверх и вниз.
Хотя если записываете полет с большой высоты и рядом не за что зацепиться глазу, то заметно вообще не будет.
Аналогично, был сделан адаптер для крепления подвеса к штативу или сейфипалке (1/4" стандартная фоторезьба — дюймовая).
Крепление гироподвеса обеспечивается к стандартной резьбе от штатива 1/4".

Удобно использовать селфипалку с таким креплением, получается стедикам для экншкамеры.
Наклоны из стороны в сторону.
То же самое, сбоку.

Как стедикам можно использовать условно, хотя бы потому, что крепление предусмотрено в верхней части подвеса.
Либо перебирать подвес и перенастраивать контроллер (менять положение акселерометра), либо пользоваться как есть.
На плате есть два входа — можно проверить отклонение и установку углов сервотестором, но к сожалению, у Bugs3 нет дополнительно выходов Pan/Tilt для отклонения подвеса по требованию, и в данный момент не востребовано.

Питание лучше завести напрямую на вход с батарейки, а вот Pan/Tilt так и остаются не подключенными.
Камрад ResSet добавил в комментарии отличный видеообзор на этот гироподвес.
Выводы: неплохой и недорогой подвес. Я бы даже сказал, что один из самых недорогих в своем классе.
Больше предназначен для квадриков типа Фантома, так как на него устанавливается без адаптеров.
А на Bugs3 пришлось повозиться.
Квадрик еще не облетал — мешает непогода и сильный ветер. Достаточно важно при облете будет выставить центровку и баланс — все-таки добавляется приличная масса на корпусе.
В данный момент лот стоит $49.99, хотя цена начиналась от $30+, так что рекомендовать к покупке прямо сейчас я не буду, лучше поискать подешевле или подождать купон.
Прикладываю свои модели для установки данного подвеса:
3D-модель «Крепление гироподвеса на MJX Bugs 3»
3D-модель «Крепление гироподвеса к штативу/селфипалке»
В обзоре будет информация об установке подвеса на квадрик, плюс модели адаптера (для 3д печати), а также бонусом модель крепления подвеса к селфипалке (аля бюджетный стедикам).
2Axis Brushless PTZ Gimbal Camera Mount — недорогой и простой двухосевой подвес для камеры на р/у технику. Чаще всего такое устанавливают именно на мультикоптеры — именно из-за удобства (малый вес и габариты). Можно подвешивать не только экнш-камеру для записи полетов, но и FPV камеру — гораздо комфортнее пилотировать.
Для чего нужен подвес — все просто. Подвес стабилизирует рамку с камерой относительно притяжения земли и удерживает это положение. Причем при каждом включении он устанавливает баланс рамки (center-of-gravity posttion) с установленной камерой (либо пустой), причем масса камеры может быть различная (в пределах до 70 г). В полете это положение удерживается непрерывно за счет компенсации отклонений движениям моторчиков. В данном модели предусмотрена компенсация по двум осям, в более дорогих — по трем. Также на плате контроллера присутствует вход внешнего сигнала отклонения камеры Pan/Tilt — управление наклоном и поворотом камеры по требованию. Заданное положение будет также стабилизироваться.
Более дешевые модели, кстати, идут без контроллеров — только рамки с двигателями. Докупать контроллер нужно будет отдельно. А в обозреваемой модели все все есть + в комплекте есть провода для подключения и установочный комплект (винты, стойки).
Особенности: черный и металлический (серебристый) фрезерованный алюминиевый каркас.
Особенности данного подвеса: простая и прочная конструкция и небольшой вес из-за применения фрезерованных алюминиевых деталей. Использование в качестве приводов бесколлекторных двигателей также повышает надежность и уменьшает вибрации самого подвеса. Дополнительно установлены резиновые амортизаторы. На подвесе установлен контроллер, плюс плата гироскопа. Нужно просто подать на него питания — и он начнет работать.
На фотографии представлены все комплектующие подвеса. Обратите внимание на четыре резиновых амортизатора — дополнительная защита от вибраций корпуса мультикоптера.
Характеристики:
— Type: PTZ Gimbal
— Axis: 2 axis gyro, brushless gimbal driver
— Flight controller: BGC
— Weight: 230/300gram with/without Gopro hero 3
— Compatible camera: Gopro hero camera( not included)
— Sensor: GY6050
— Power: 1A DC-DC LDO module
— Peak current: 10A
— Interface mini USB/IIC interface
— Firmware: Alexmos V2.3B5 (Updated from BGC3.1 by GLB).
— Battery plug type:JST plug
— Voltage:12V
Упаковка и комплект.
Пришло в коробке, картонной, просторной))))
Внутри комплект: подвес в сборе, инструкция.
Провода: несколько проводников (типа Dupont), плюс JST plug для пайки (хвостик). На плате припаян штекер JST. Монтажный комплект — четыре латунных стойки М3 и 8 крепежных винтов к ним.
На всякий случай фото инструкции
Внешний вид гироподвеса.
Как я уже сказал, подвес полностью собран и готов к работе. Камера фиксируется специальной липучкой с окошком *(на фото синего цвета).
Двигатели в металлических корпусах — это одновременно и прочность, и неплохой отвод тепла.
Две оси — две рамки с двигателями. На первой рамке закреплена вторая рамка со вторым двигателем и креплением камеры.
В основании установлены амортизаторы. Вообще цвет амортизаторов может отличаться от партии к партии. А также встречал крашеные алюминиевые рамки.
По железу — используются бесколлекторные двигатели типоразмера 2208 (без маркировки), а вот с контроллером интереснее.
Контроллер SimpleBGC Gimbal Controller сделан на Атмега328. Прошивка доступна, можно отредактировать PID (по ссылке SimpleBGC _GUI_2_2b2 gimbal controller.
На плате видны диоды Шоттки (SS14), стабилизатор AMS1117, справа два входа установки угла Pan/Tilt
Мега крупным планом. Слева от меги стоит преобразователь CP2102 — подключен к шине USB.
Выходы на двигатели запитаны через группу мосфетов 4606С (N-CHANNEL 60V/7.5A SO-8 STripFET POWER MOSFET)
Маркировка акселерометра: INVENSENSE MPU-6050 DIY 627-E1 — Motion Processing Unit MPU-6050 на базе 3-осевого МEMS гироскопа.
Установка камеры.
Порядок установки простой. Сначала нужно расцепить резиновые амортизаторы-бочонки, и получить доступ к верхней крышке. Установить крышку на корпус мультикоптера, при необходимости можно использовать латунные стойки. Крепеж из комплекта (М3), но я использовал свой по месту.
Далее, устанавливаем обратно к крышке подвес и резиновые амортизаторы.
Крепим на липучку камеру.
Если есть дополнительно каналы на мультикоптере для управления камерой (Pan/Tilt), то можно подключить и их.
Небольшое примечание — сначала закрепите камеру на подвесе (и естественно — подвес на квадрике), и только потом подавайте питание. Иначе квадрик «запомнит» холостое положение, которое после установки камеры изменится, подвес начнет дергаться и т.п. То же самое касается установки камеры без аккумулятора — масса аккумулятора будет также влиять. Так что сначала установка, потом питание.
Для подключения питания подвеса нужно вывести от батарейки мультикоптера хвостик с JST. Подвес работает от 2S (7.4V), но желательно использовать 3S батареи (11.1V), в спецификации указано про 12В.
На плате, кстати, находится аппаратная кнопка — она будет нужна для установки положений и регулировки PID.
Пробуем подать питание — загораются светодиоды на плате контроллера и плате акселерометра.
Работа подвеса при питании — постепенно выходит на режим, при закритичных отклонениях начинается вибрация, если совсем перебор или превышение усилия (заклинивание), то двигатели временно отключаются.
Масса с камерой и адаптером в пределах 300 г. Лучше не превышать это значение.
Отдельно подвес весит около 200 г. На фото подвес + адаптер.
Дальше стояла задача закрепить подвес на корпусе квадрокоптера, а конкретно — на неплохом бюджетном бесколлекторнике MJX Bugs3.
Будет несколько скринов, из разряда «как нарисовать сову».
Мне пришлось по размерам посадочного места в квадрике (там сложная форма с замком) и крепления на подвесе (5 отверстий Ø3 мм, шаг 10 мм) рисовать с нуля адаптер для крепления. Примерно раза с третьего получилось сделать крепление.
Естественно, все это проще сделать методом 3Д печати — дел на 20 минут и три копейки.
Особенно долго «попадал» в размеры замочка на корпусе квадрика. Зато подвес сейчас быстросъемный.
Получается достаточно неплохо.
Установленный адаптер на квадрик.
Для демонстрации подвеса попробовал сделать несколько видеороликов (будут гифки).
Наклоны квадрика из стороны в сторону подвес отрабатывает быстро))))
Будет вид сбоку. Квадрик наклоняется вперед и назад.
Хорошо видна стабилизация рамки с камерой.
Чуть усложнил задачу.
Наклоны по двум осям.
Камера остается в одном и том же положении.
Единственно — меняется высота. То есть на видео будет заметно перемещение вверх и вниз.
Хотя если записываете полет с большой высоты и рядом не за что зацепиться глазу, то заметно вообще не будет.
Аналогично, был сделан адаптер для крепления подвеса к штативу или сейфипалке (1/4" стандартная фоторезьба — дюймовая).
Крепление гироподвеса обеспечивается к стандартной резьбе от штатива 1/4".
Удобно использовать селфипалку с таким креплением, получается стедикам для экншкамеры.
Наклоны из стороны в сторону.
То же самое, сбоку.
Как стедикам можно использовать условно, хотя бы потому, что крепление предусмотрено в верхней части подвеса.
Либо перебирать подвес и перенастраивать контроллер (менять положение акселерометра), либо пользоваться как есть.
На плате есть два входа — можно проверить отклонение и установку углов сервотестором, но к сожалению, у Bugs3 нет дополнительно выходов Pan/Tilt для отклонения подвеса по требованию, и в данный момент не востребовано.
Питание лучше завести напрямую на вход с батарейки, а вот Pan/Tilt так и остаются не подключенными.
Камрад ResSet добавил в комментарии отличный видеообзор на этот гироподвес.
Выводы: неплохой и недорогой подвес. Я бы даже сказал, что один из самых недорогих в своем классе.
Больше предназначен для квадриков типа Фантома, так как на него устанавливается без адаптеров.
А на Bugs3 пришлось повозиться.
Квадрик еще не облетал — мешает непогода и сильный ветер. Достаточно важно при облете будет выставить центровку и баланс — все-таки добавляется приличная масса на корпусе.
В данный момент лот стоит $49.99, хотя цена начиналась от $30+, так что рекомендовать к покупке прямо сейчас я не буду, лучше поискать подешевле или подождать купон.
Прикладываю свои модели для установки данного подвеса:
3D-модель «Крепление гироподвеса на MJX Bugs 3»
3D-модель «Крепление гироподвеса к штативу/селфипалке»
| +13 |
7894
28
|
Самые обсуждаемые обзоры
| +65 |
3412
112
|
| +94 |
4702
175
|
| +77 |
2851
82
|
| +58 |
4439
61
|
И как собрались сажать квадрокоптер с подвесом?
Выглядит это так
Хотя и комплектные ноги у Bugs3 длинные. Просто на фото не ставил, чтобы не мешали снимать.
По поводу полетов — попробовал на выходных с ним полетать — чуть не сдуло.
Жду штиля)))) Дома на нем категорически не полетаешь…
После всех добавлений изменится конфигурация квадрокоптера — увеличится вес коптера, повысится энергопотребление, что скажется на времени полета и поведении в полете. Нужно будет корректировать PIDы коптера, а это невозможно.
Проще собрать и настроить самодельный коптер
На первое время — просто полеты и запись видео с высоты. В соседней теме обсуждали усилители WiFi — так вот, моя камера с Wifi, подойдет на первое время.
К тому же, аппаратура управления коптером работает на частоте WiFi 2,4Гц — будут друг друга перебивать по частоте и создавать помехи друг другу. Коптер вообще может потерять связь и улететь в Китай из-за помех.
вот кадр из видео с его заднего двора, там олененок, живут же люди
немного дерзкого видео 3d www.youtube.com/watch?v=xkRa5PScUsM
Да, примерно так, только ни одна курица не пострадала)))))
Их принято называть демпферами.
Идея с 3d принтом отличная, не думали заменить металлические детали на свой пластик? Думаю, 50-70% массы подвеса можно сбросить таким образом.
Как коптер реагирует на смещение ЦТ?
Имхо на принтере детали будут целые до первого падения)))) А так да — дешево и быстро)))
После всех экспериментов я вернулся к заводской жесткой раме подвеса, а напечатанные детальки выкинул в помойку.
Ну и еще минус — детальки под тепловым воздействием могут «поплыть». Короче, фигня полная с этой 3D печатью
Вот только новые лопасти я бы прикупил бы)))
А потом я купил H501S, потом Phantom 3SE и дух авантюризма угас — так и лежат подвес и набор FPV где-то в коробке =)
Я вот перепиливаю трехосевой под соньку для использования в роли ручного гимбала.
Если появится купон — добавлю. Аналогичные модели продаются и в других магазинах, сейчас дешевле.
P.s. что за шторм? я не в курсе))))
Вот видео по настройке, если кому надо
там покупали кит для Bugs3, из этого кита использовали адаптер для камеры, просто цепляли на адаптер крепление подвеса.
Попробовал — для полетов нужно смещать баланс назад.
Если пластиковый адаптер переделывать — он уже будет массивнее, с проставками, так как конструкция корпуса Bugs3 не позволяет закрепить его вплотную.
И скорее всего буду использовать комплектные стойки М3.
Значительное смещение ЦТ. При установке штатной мелкой камеры грамм на 10-15 того еще достаточно, но подвес с камерой уже на порядок тяжелее.
Спасибо, что обратили внимание — я так понял он очень сильно кренится вперед при повороте?
Просто у тебя превышен полетный вес. И квадрик не справляется с ветром.