3d сканер Ciclop

- Цена: 125.99 usd
- Перейти в магазин
Приветствую всех. Сегодня — маленький обзор настольного сканера Ciclop.
В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).
Ссылки на полные комплекты документации:
www.cowtechengineering.com/downloads
www.bq.com/ru/support/ciclop/support-sheet
В комплекте имеем вот такую «рассыпуху»:

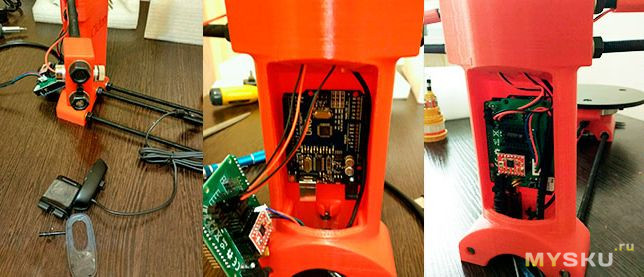
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.




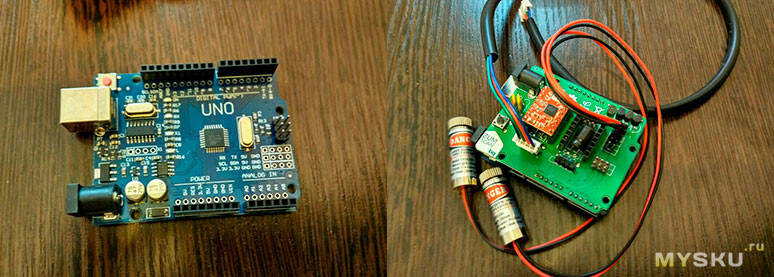
Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
После сборки, сканер прошел калибровочные процедуры в родном софте Horus.
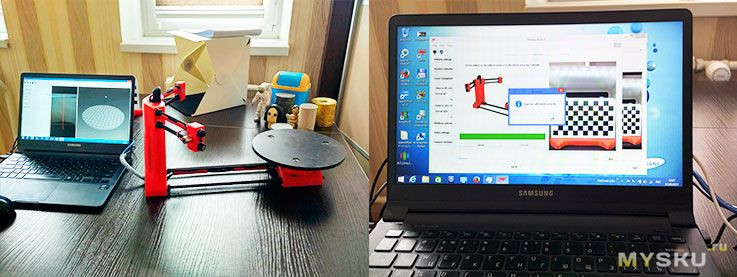
Поскольку к этому моменту я уже знал, что качество сканирования очень сильно зависит от качества освещения (стабильности, рассеянности, цветовой температуры) я заранее озаботился наличием маленького лайтбокса, чтобы хотя бы обеспечить мало-мальски сопоставимые условия для проб.

Подобрав «кандидатов» для проб, я приготовился.

Требования к объекту заявлены такие:
1. Объект должен быть больше 5х5 см, но меньше чем 20х20см
2. Объект должен быть непрозрачным и неподвижным
3. Объект должен весить не больше 3 кг
Затруднительно сканировать:
1. Блестящие, светящиеся объекты
2. Слишком темные объекты
3. Объекты с размытой поверхностью (например, мягкие игрушки)
Результатом сканирования является облако точек в формате PLY (которые потом необходимо преобразовать в поверхность). Вот здесь руководство для пост-обработки облака и подготовки STL-файла.
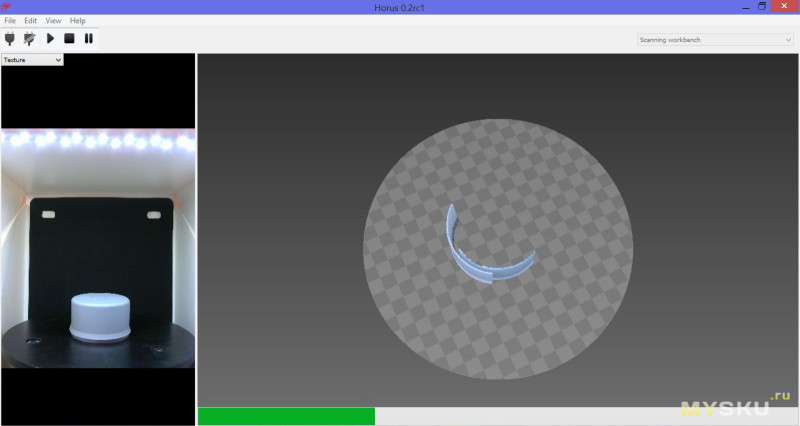
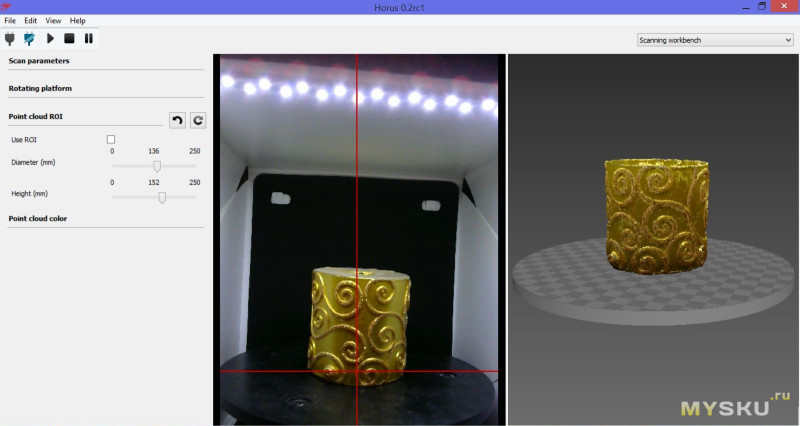
Почитав руководство по оптимизации сканирования, попробовать я решил с простого цилиндрического предмета.
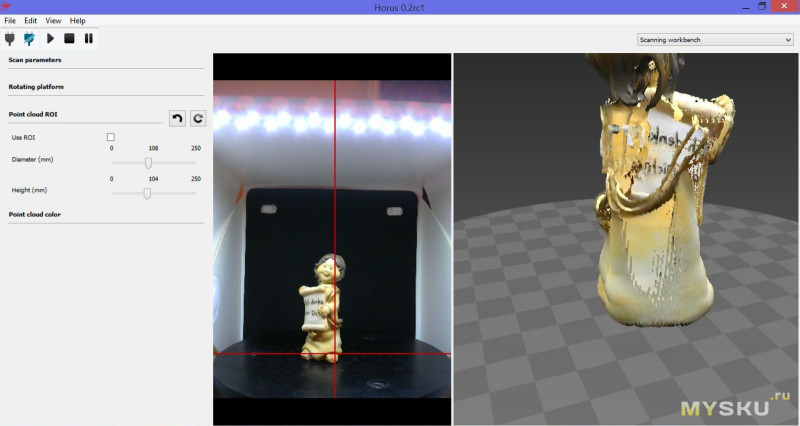
После нескольких попыток я убедился, что имею распространенную проблему — несовпадения облаков точек от правого и левого лазера, да и с пропорциями вопрос.

Ничего путного по данному поводу кроме попытки откалибровать настройки вебкамеры (они не калибруются при работе мастера калибровки) найти не удалось (чувак по имени Иисус из саппорта BQ — давно не отвечает на вопросы). Для этого необходимо наделать несколько снимков с различными положениями калибровочной таблицы. Наделал. Положение улучшилось, но не до конца.
Пришлось ручками править калибровочный файл (calibration.json в папке Horus-a) и методом проб ошибок, сканируя цилиндрический предмет — добиваться совпадения облаков.
И вот вроде все ок:
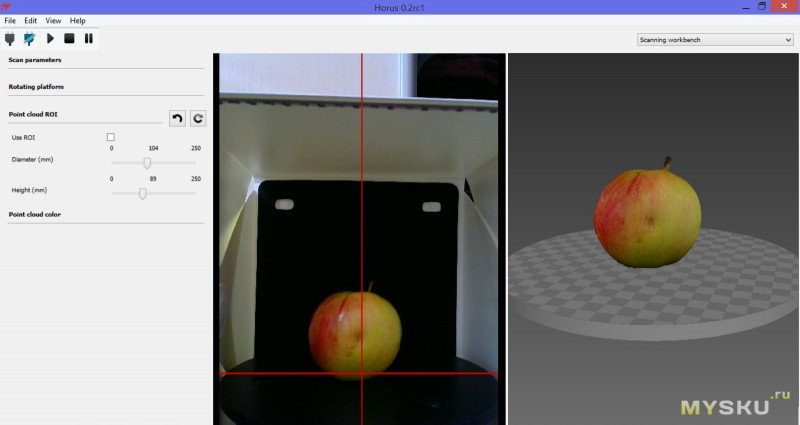
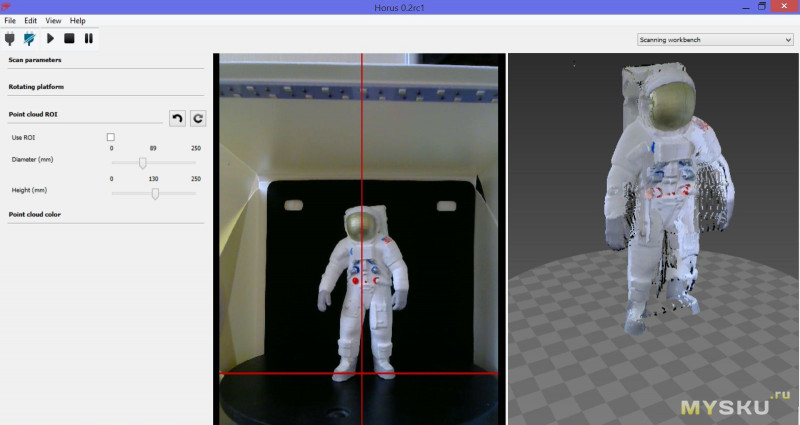
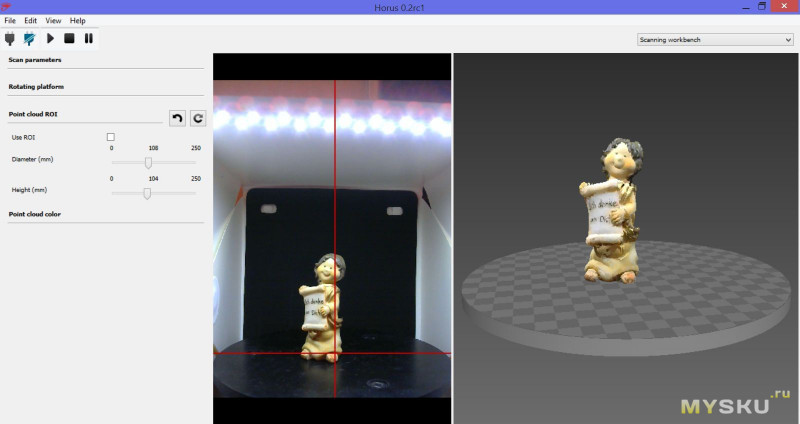
Но нет — на сложных предметах фрагменты облаков все равно порой не совпадают, к тому же образуется много «слепых» зон:
Кроме того, очевидно, что сканирование ярко красных предметов будет невозможно, во всяком случае с штатными лазерами.
Можно, конечно продолжать экспериментировать со сканированием отдельными лазерами и попытками в стороннем софте совместить все это хозяйство, а потом попытаться приводить в жизнеспособный для STL вид.
В общем, я понял, что адептом подобного творчества не являюсь, и имею подозрение, что с нуля смоделировать предметы, которые по силу сканеру — проще.
А сложные — со сложными не справляется сканер в штатном режиме, маловато ему двух лазеров -остаются слепые зоны. Для устранения данной проблемы — надо сканировать в других положениях и потом опять мучиться с совмещением облаков. Нет уж, спасибо.
В итоге — штука сгодится только для изучения основ лазерного сканирования, для чего то более — абсолютно бесполезная. Нет, конечно, получить нечто очертаниями похожее на исходную модель — можно, но на этом (и это с учетом всех бубнов с обработкой облаков) — всё. Не зря видать испанцы закинули это дело.
Магазин подстраховался — в описании честно изложено, что результат зависит от положения планет и настроения тети Сони с третьего этажа. Опенсорс и все такое, давайте плясать вместе. Нет уж, спасибо.
Вывод — не брать, а если охота экстрима -собрать самому из того же, из чего товарищ из анекдота делает кораблики.
В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).
Ссылки на полные комплекты документации:
www.cowtechengineering.com/downloads
www.bq.com/ru/support/ciclop/support-sheet
В комплекте имеем вот такую «рассыпуху»:
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.
Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
После сборки, сканер прошел калибровочные процедуры в родном софте Horus.
Поскольку к этому моменту я уже знал, что качество сканирования очень сильно зависит от качества освещения (стабильности, рассеянности, цветовой температуры) я заранее озаботился наличием маленького лайтбокса, чтобы хотя бы обеспечить мало-мальски сопоставимые условия для проб.
Подобрав «кандидатов» для проб, я приготовился.
Требования к объекту заявлены такие:
1. Объект должен быть больше 5х5 см, но меньше чем 20х20см
2. Объект должен быть непрозрачным и неподвижным
3. Объект должен весить не больше 3 кг
Затруднительно сканировать:
1. Блестящие, светящиеся объекты
2. Слишком темные объекты
3. Объекты с размытой поверхностью (например, мягкие игрушки)
Результатом сканирования является облако точек в формате PLY (которые потом необходимо преобразовать в поверхность). Вот здесь руководство для пост-обработки облака и подготовки STL-файла.
Почитав руководство по оптимизации сканирования, попробовать я решил с простого цилиндрического предмета.
После нескольких попыток я убедился, что имею распространенную проблему — несовпадения облаков точек от правого и левого лазера, да и с пропорциями вопрос.
Ничего путного по данному поводу кроме попытки откалибровать настройки вебкамеры (они не калибруются при работе мастера калибровки) найти не удалось (чувак по имени Иисус из саппорта BQ — давно не отвечает на вопросы). Для этого необходимо наделать несколько снимков с различными положениями калибровочной таблицы. Наделал. Положение улучшилось, но не до конца.
Пришлось ручками править калибровочный файл (calibration.json в папке Horus-a) и методом проб ошибок, сканируя цилиндрический предмет — добиваться совпадения облаков.
И вот вроде все ок:
Но нет — на сложных предметах фрагменты облаков все равно порой не совпадают, к тому же образуется много «слепых» зон:
Кроме того, очевидно, что сканирование ярко красных предметов будет невозможно, во всяком случае с штатными лазерами.
Можно, конечно продолжать экспериментировать со сканированием отдельными лазерами и попытками в стороннем софте совместить все это хозяйство, а потом попытаться приводить в жизнеспособный для STL вид.
Все это напоминает один анекдот с корабликами в бутылках.
-Как ты делаешь кораблики в бутылках?
-В бутылку помещаю песок, силикатный клей, палочки и трясу.
Получается всякое говно, а иногда — кораблики.
-В бутылку помещаю песок, силикатный клей, палочки и трясу.
Получается всякое говно, а иногда — кораблики.
В общем, я понял, что адептом подобного творчества не являюсь, и имею подозрение, что с нуля смоделировать предметы, которые по силу сканеру — проще.
А сложные — со сложными не справляется сканер в штатном режиме, маловато ему двух лазеров -остаются слепые зоны. Для устранения данной проблемы — надо сканировать в других положениях и потом опять мучиться с совмещением облаков. Нет уж, спасибо.
В итоге — штука сгодится только для изучения основ лазерного сканирования, для чего то более — абсолютно бесполезная. Нет, конечно, получить нечто очертаниями похожее на исходную модель — можно, но на этом (и это с учетом всех бубнов с обработкой облаков) — всё. Не зря видать испанцы закинули это дело.
Магазин подстраховался — в описании честно изложено, что результат зависит от положения планет и настроения тети Сони с третьего этажа. Опенсорс и все такое, давайте плясать вместе. Нет уж, спасибо.
Вывод — не брать, а если охота экстрима -собрать самому из того же, из чего товарищ из анекдота делает кораблики.
Самые обсуждаемые обзоры
| +223 |
3676
137
|
| +23 |
966
40
|
Естественно брать и не думаю )))
в любом случае спасибо автору за честный обзор
вроде бы есть программы, которые перегоняют энное кол-во фотогорафий предмета с разных рвкурсов (лайтбокс+поворотный круг ) в 3д модель.моюет так и проще даже будет
Время летит…
а так очень даже не плохо набор идёт
а сейчас купил игру и фиг поиграешь если нет сети ;((
Я по этому поводу уже написал — я быстрее в SW нужное смоделирую, чем сканер окончит сканировать
Тут без всяких проб скажу — минимальный габарит в 5 см — это очень оптимистично BQ заявили.
Себестоимость раза в 4 ниже (движок, пара вертикальных лазеров, Web камера и Arduino nano).
Думаю, что если бы детали были литые качеством повыше — может и результат был бы получше. Мёртвые зоны, конечно, вряд ли бы убрал, но вот облако было бы поплотнее.
И хотелось бы, что бы по рекомендации выше вы попробовали откалибровать сканер по комплектной шахматке — и отписались бы по результату, если не сложно.
Никаких разных пропорций калибровка не предусматривает, в настройках только длина стороны квадрата.
Gorex пошутил, а Вы восприняли всерьез