Гоночный квадрокоптер 130-го размера для начинающих. JJRC JJPRO P130 Battler. Комплект RTF.

- Цена: 135,99$ c купоном и доставкой
- Перейти в магазин
Привет любителям квадрокоптеров и интересующимся!
Сегодня обозреваю модель 130-го размера (130 мм между осями моторов по диагонали) в полной комплектации JJRC JJPRO P130 Battler.
Сразу скажу, что модель достаточно спорная (по весу перебор), но интересная по ценнику.
Кого заинтересовало — прошу под cut
Доставка заняла 17 дней (отправлено было 13 марта) — неплохо:
Состояние упаковки я бы оценил на 4:
Обратная сторона:
Но внутренняя упаковка выше всяких похвал. Можно играть в футбол (как любят делать на почте) и содержимое останется целым:
Весь комплект выглядит так:
и включает в себя:
1 * JJPRO P130 квадрокоптер
1 * Передатчик FlySky I6
1 * 6-канальный приёмник
1 * 5.8ГГц видеопередатчик 40 каналов с камерой CMOS 800TVL
1 * Зарядное устройство
1 * Кабель для ЗУ
8 * Пропеллеров
1 * 11.1V 850mAh 30C Li-po аккумулятор
1 * Стяжка аккумулятора
2 * Шестигранника
2 * Держателя камеры
1 * Инструкция
1 * Компакт-диск с инструкцией к передатчику
Зарядное устройство JJPRO B3 Pro имеет побаночный контроль напряжения:
и может заряжать аккумуляторы 2S и 3S: током 800мА:
током 800мА: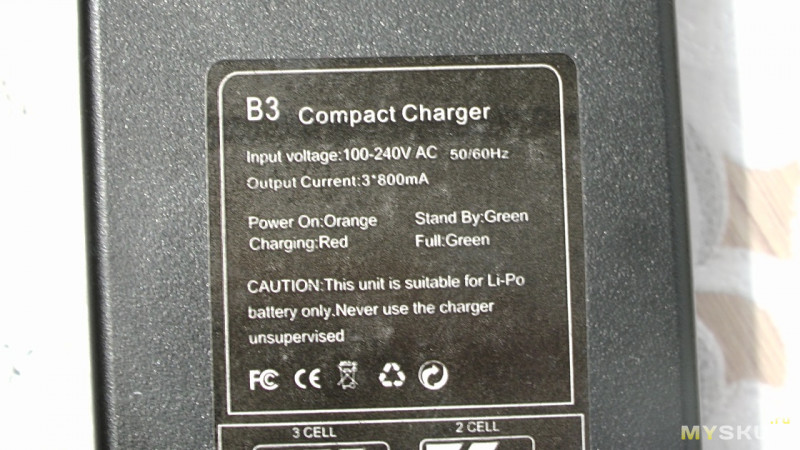 то есть, зарядка штатного аккумулятора занимает чуть больше часа.
то есть, зарядка штатного аккумулятора занимает чуть больше часа.
Инструкция номинальная, как говорится — «ни о чём»: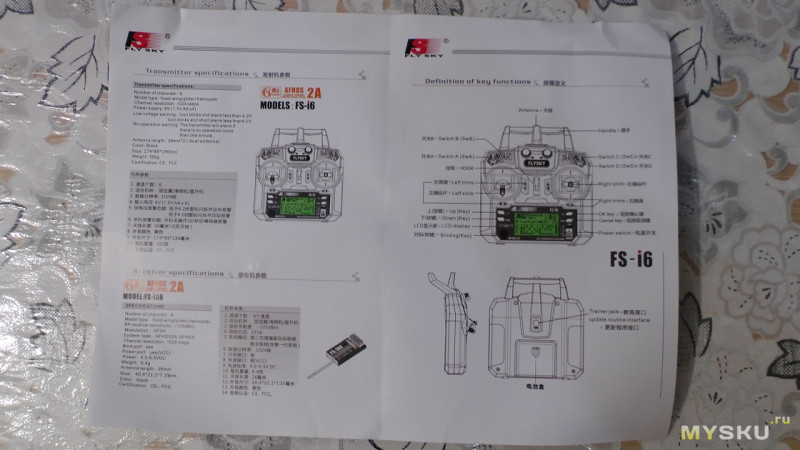 Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике.
Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике.
Запасные пропеллеры размера 3045: Это хорошо. Для гоночных квадриков пропеллеры — первый расходник.
Это хорошо. Для гоночных квадриков пропеллеры — первый расходник.
Аккумулятор 3S 850мАч 30С: весит 70г:
весит 70г:
и обеспечивает 4-5 минут активного полёта.
Моторы и регуляторы поддерживают напряжение 14,8В, поэтому протестируем этот квадрокоптер и на аккумуляторе 4S 1000мАч: Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.
Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.
Передатчик Flysky i6 в представлении не нуждается. Надёжная бюджетная модель:
Питание от четырёх элементов формата АА:
Очень цепкие стики регулируемой длины: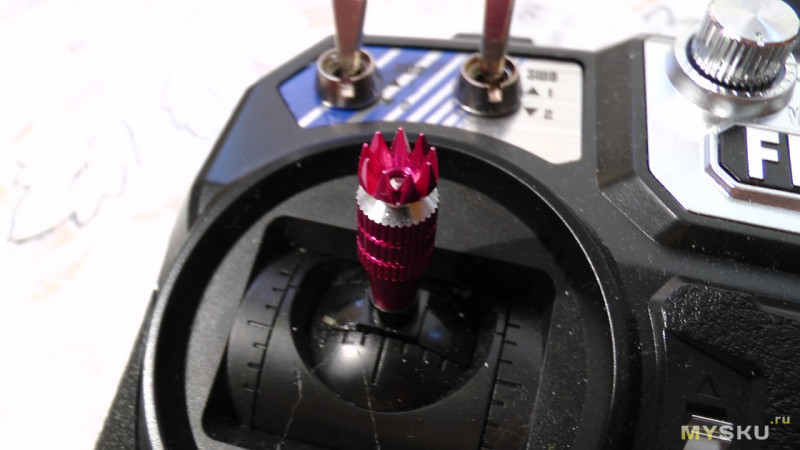
Есть две «крутилки» для управления подвесом:
Меню на английском языке, простое и понятное для освоивших хотя бы школьный курс:
Настройки коптера, первый экран: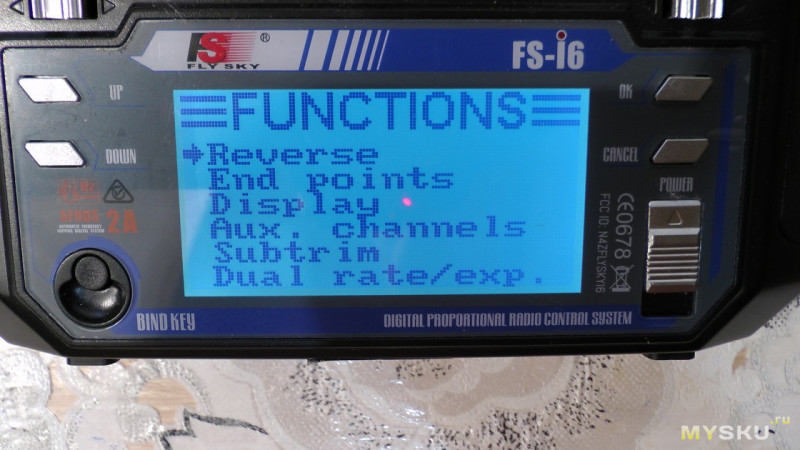
Второй экран:
Системное меню, первый экран: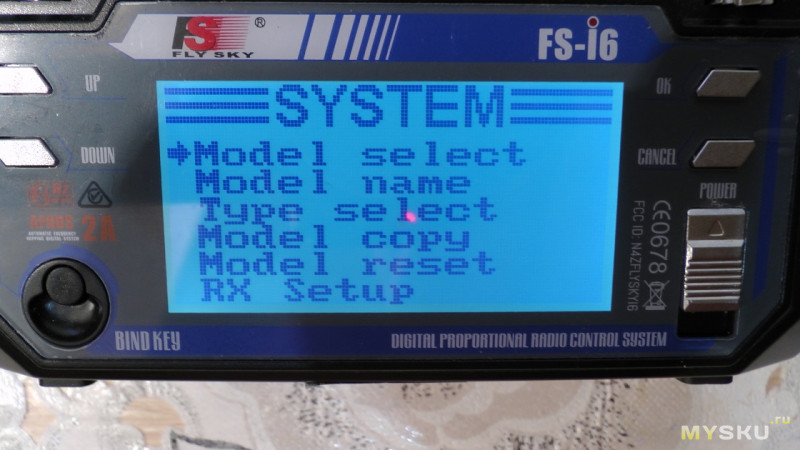
Второй экран: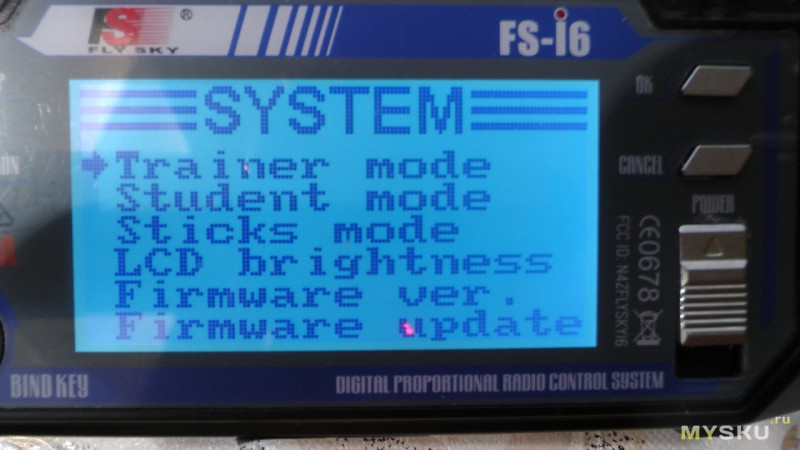
Особенности и характеристики квадрокоптера (перевод со страницы магазина):
Полётный контроллер CC3D
Прочная рама из карбона и стекловолокна (сэндвич)
Возможность 3D пилотажа
Светодиодная подсветка для ночных полётов
Бесколлекторные моторы 1806 2300KV. Поддержка батарей 2-4S Lipo
Курсовая камера 800TVL с передатчиком 5.8G 40ch
Регуляторы Flycolor 12A, максимальный ток 18A, поддержка 2-4S Lipo
Диагональ между осями моторов: 130мм
3 цвета на выбор
Приёмник: FS-iA6 6CH
Камера снабжена сенсором 1/3" CMOS
Угол обзора по горизонтали: 150°
Диаметр линзы: 2.1мм
Видеопередатчик работает в системах NTSC/PAL
Сопротивление: 75 Ohm
Выходной сигнал: 12-14dB
Мощность: 25mW
Количество каналов: 40CH
Аккумулятор: 11.1V 850mAh 30C Li-po
Размеры аккумулятора: 65 * 25 * 23mm
Полётное время 5-6 минут
Время зарядки около 60 минут
Вес квадрокоптера без аккумулятора: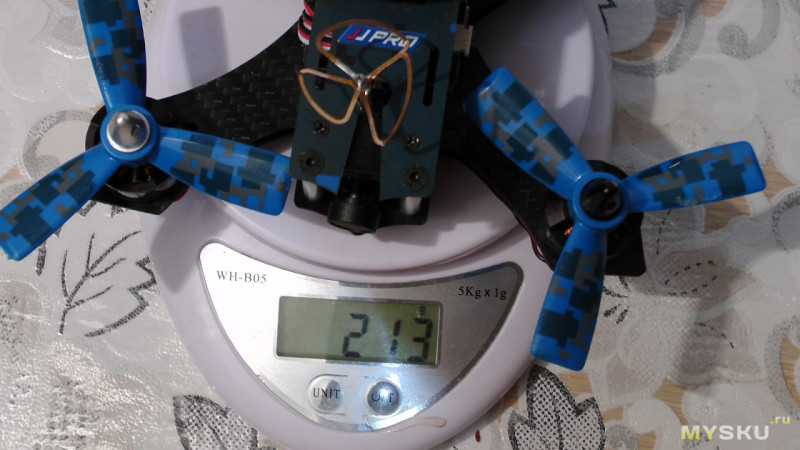 Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус.
Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус.
Вид анфас: Наклон камеры регулируется в достаточно широком диапазоне.
Наклон камеры регулируется в достаточно широком диапазоне.
Есть разъём miniUSB для настройки контроллера, к которому мне не удалось подключиться: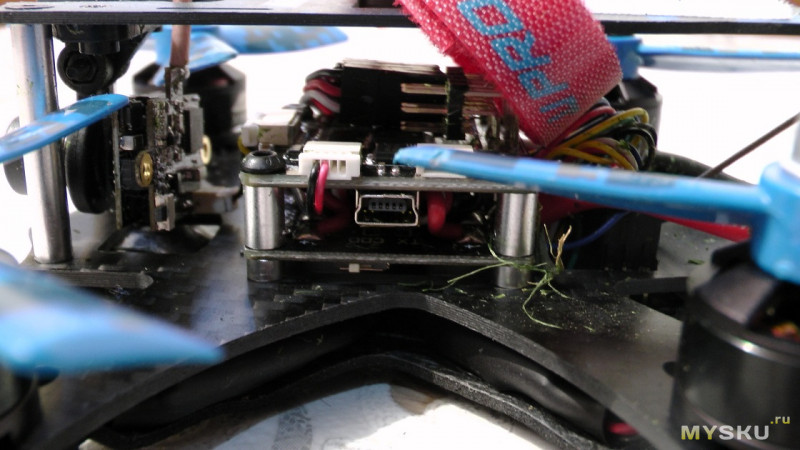 Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.
Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.
Силовой разъём XT60 закрепил пластиковым хомутом, антенны вывел под углом 90 градусов:
Вид сверху:
Снизу: Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.
Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.
На мой взгляд, крепление регуляторов было бы надёжнее, если бы было выполнено с помощью пластиковых хомутов:
Маркировка моторов: к ним претензий нет (смотрите видео распаковки).
к ним претензий нет (смотрите видео распаковки).
Полётный контроллер CC3D: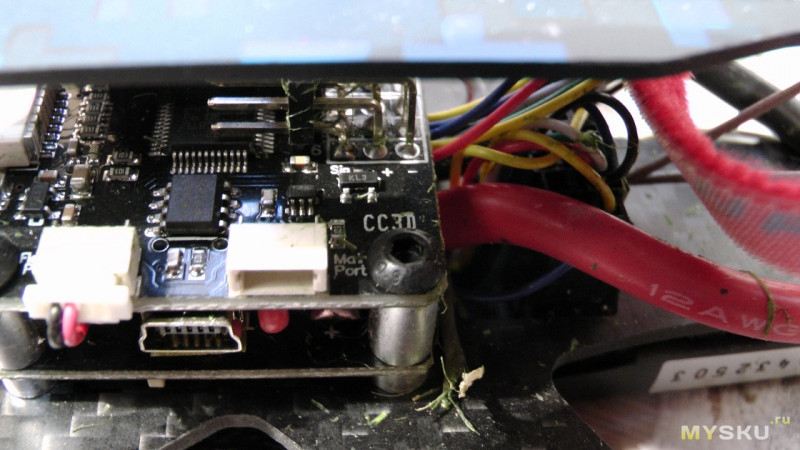
Светодиодная подсветка не вызывает нареканий:

Видео распаковки и облёта:
Тест аккумулятора 4S и FPV полёт с крашем:
Купон на скидку 20$ LCXRM6853
Подведём итоги обзора:
В «плюсе» имеем полный комплект, готовый к полёту «из коробки», вполне гуманный ценник с учётом купона, прочнейшую карбоновую раму, прочные пропеллеры, неплохую курсовую камеру, поддержку 4S батарей, проверенный передатчик.
В «минусе» — устаревший контроллер с проблемной настройкой, большой вес, спорную компоновку регуляторов.
Покупать или нет — выбор сугубо индивидуальный. Я лишь постарался предоставить максимально объективную информацию.
Подходящий шлем для этого квадрокоптера за 44$: www.tomtop.com/rc-quadcopter-1192/p-rm7350.html
До новых встреч, друзья!
Сегодня обозреваю модель 130-го размера (130 мм между осями моторов по диагонали) в полной комплектации JJRC JJPRO P130 Battler.
Сразу скажу, что модель достаточно спорная (по весу перебор), но интересная по ценнику.
Кого заинтересовало — прошу под cut
Доставка заняла 17 дней (отправлено было 13 марта) — неплохо:
Состояние упаковки я бы оценил на 4:
Обратная сторона:
Но внутренняя упаковка выше всяких похвал. Можно играть в футбол (как любят делать на почте) и содержимое останется целым:
Весь комплект выглядит так:
и включает в себя:
1 * JJPRO P130 квадрокоптер
1 * Передатчик FlySky I6
1 * 6-канальный приёмник
1 * 5.8ГГц видеопередатчик 40 каналов с камерой CMOS 800TVL
1 * Зарядное устройство
1 * Кабель для ЗУ
8 * Пропеллеров
1 * 11.1V 850mAh 30C Li-po аккумулятор
1 * Стяжка аккумулятора
2 * Шестигранника
2 * Держателя камеры
1 * Инструкция
1 * Компакт-диск с инструкцией к передатчику
Зарядное устройство JJPRO B3 Pro имеет побаночный контроль напряжения:
и может заряжать аккумуляторы 2S и 3S:
током 800мА:то есть, зарядка штатного аккумулятора занимает чуть больше часа.Инструкция номинальная, как говорится — «ни о чём»:
Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике.Запасные пропеллеры размера 3045:
Это хорошо. Для гоночных квадриков пропеллеры — первый расходник.Аккумулятор 3S 850мАч 30С:
весит 70г:и обеспечивает 4-5 минут активного полёта.
Моторы и регуляторы поддерживают напряжение 14,8В, поэтому протестируем этот квадрокоптер и на аккумуляторе 4S 1000мАч:
Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.Передатчик Flysky i6 в представлении не нуждается. Надёжная бюджетная модель:
Питание от четырёх элементов формата АА:
Очень цепкие стики регулируемой длины:
Есть две «крутилки» для управления подвесом:
Меню на английском языке, простое и понятное для освоивших хотя бы школьный курс:
Настройки коптера, первый экран:
Второй экран:
Системное меню, первый экран:
Второй экран:
Особенности и характеристики квадрокоптера (перевод со страницы магазина):
Полётный контроллер CC3D
Прочная рама из карбона и стекловолокна (сэндвич)
Возможность 3D пилотажа
Светодиодная подсветка для ночных полётов
Бесколлекторные моторы 1806 2300KV. Поддержка батарей 2-4S Lipo
Курсовая камера 800TVL с передатчиком 5.8G 40ch
Регуляторы Flycolor 12A, максимальный ток 18A, поддержка 2-4S Lipo
Диагональ между осями моторов: 130мм
3 цвета на выбор
Приёмник: FS-iA6 6CH
Камера снабжена сенсором 1/3" CMOS
Угол обзора по горизонтали: 150°
Диаметр линзы: 2.1мм
Видеопередатчик работает в системах NTSC/PAL
Сопротивление: 75 Ohm
Выходной сигнал: 12-14dB
Мощность: 25mW
Количество каналов: 40CH
Аккумулятор: 11.1V 850mAh 30C Li-po
Размеры аккумулятора: 65 * 25 * 23mm
Полётное время 5-6 минут
Время зарядки около 60 минут
Вес квадрокоптера без аккумулятора:
Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус.Вид анфас:
Наклон камеры регулируется в достаточно широком диапазоне.Есть разъём miniUSB для настройки контроллера, к которому мне не удалось подключиться:
Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.Силовой разъём XT60 закрепил пластиковым хомутом, антенны вывел под углом 90 градусов:
Вид сверху:
Снизу:
Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.На мой взгляд, крепление регуляторов было бы надёжнее, если бы было выполнено с помощью пластиковых хомутов:
Маркировка моторов:
к ним претензий нет (смотрите видео распаковки).Полётный контроллер CC3D:
Светодиодная подсветка не вызывает нареканий:
Видео распаковки и облёта:
Тест аккумулятора 4S и FPV полёт с крашем:
Купон на скидку 20$ LCXRM6853
Подведём итоги обзора:
В «плюсе» имеем полный комплект, готовый к полёту «из коробки», вполне гуманный ценник с учётом купона, прочнейшую карбоновую раму, прочные пропеллеры, неплохую курсовую камеру, поддержку 4S батарей, проверенный передатчик.
В «минусе» — устаревший контроллер с проблемной настройкой, большой вес, спорную компоновку регуляторов.
Покупать или нет — выбор сугубо индивидуальный. Я лишь постарался предоставить максимально объективную информацию.
Подходящий шлем для этого квадрокоптера за 44$: www.tomtop.com/rc-quadcopter-1192/p-rm7350.html
До новых встреч, друзья!
| +42 |
8487
22
|
| +107 |
36972
169
|
Самые обсуждаемые обзоры
| +63 |
4623
129
|
| +42 |
2717
105
|
| +43 |
3089
51
|
Поставить virtualbox и там хочешь XP, хочешь 7-8-10-Линух, что угодно.
2. можно установить livecd
3. и можно установить нужную ос дополнительной
а учитывая
я бы не стал такое предлагать simavskij
да и на ос7 не плохо работе режим совместимости
Если коротко:
1. Скачиваем Oracle VM VirtualBox с www.virtualbox.org
1.1 Устанавливаем и запускаем.
2. Вставляем установочный диск WindowsXP или образ ISO выбираем в качастве установочного.
3. Устанавливаем Windows как обычно, только в качестве виртуальной системы.
4. Запускаем и пользуемся. После использования закрываем мкно и возвращаемся в текущую операционку.
5. Возможно, понадобится установить драйвера. Также не исключено, что соединяться с контролером все равно не захочет — такое случается на виртуалках (хотя и достаточно редко).
simavskij
На ноуте, где стоит Win7, нажимаешь на запускающий файлик Openpilot или Librepilot правой клавишей, в самом низу выбираешь СВОЙСТВА, далее выбираешь вкладку СОВМЕСТИМОСТЬ, ставишь галочку в Запускать в режиме совместимости с: Windows XP (выбрать в выпадающем меню). Пробуешь запустить Openpilot или Librepilot по новой.
«мальчик жестами объяснил — что его зовут Хуан»
.
и хорошо если ещё батарею не пробьёшь (так как она не защищена )
?
У вас какой размер?
фантом4 — пример квадрика с хорошо продуманной аэродинамикой.
Давно хотел приобщиться к клубу гонщиков на квадрокоптерах. Но не знаю с чего начать копать эту тему
Посоветуйте, пожалуйста, что нужно купить начинающему? Заранее спасибо
В общем, так (муськовчане, не сочтите за рекламу):
1. Смотрим серию видео www.youtube.com/watch?v=oYB5XStjWKs&list=PLOT_HeyBraBuv_lUBfvNJs9sE7AbNT4U0
2. Как вариант, также www.youtube.com/watch?v=YpjNDHv0ipI&index=7&list=PLITAVEgbjl8rdD02f95D4XVmC2ShltGh5
3. Смотрим эти два хороших обзора с инструкциями, чтобы понять, потяните ли:
mysku.club/blog/china-stores/26614.html
mysku.club/blog/china-stores/30852.html
4. Удачи!
Я не встретил в обзоре слово «стабилизация», возможно оно из видео?
youtu.be/CDL9jnsSo3A?t=9m31s
Скорее всего брак контроллера.
И запасы их еще велики.
В принципе в cc3d заливаются вполне современные прошивки, типа ClearFlight, Betaflight, iNav, Harakiri.
И вполне работают, с некоторыми ограничениями, последние две даже умеют навигацию по gps.
Конечно скоро сс3d снимут с поддержки, покупать его, а также остальное на stm32f1, не имеет смысла, но если он уже есть, почему бы не использовать.
Так что проблему с драйвером придется решать