3D сканер Revopoint MINI 2

- Цена: 93 000 рублей
- Перейти в магазин
Я занимаюсь 3Д печатью уже не первый год и некоторое время назад хобби начало приносить хоть и небольшой, но доход, вот только вместе с этим возникла потребность в создании копий нужных деталей, которых зачастую нет в свободном доступе. В моделирование вник, но всё же постоянно смотрел в сторону 3Д сканеров, позволяющих быстро создавать черновые слепки, а затем дорабатывать или даже использовать в «сыром» виде для быстрой подгонки геометрии. Сегодня покажу насколько это стало просто.
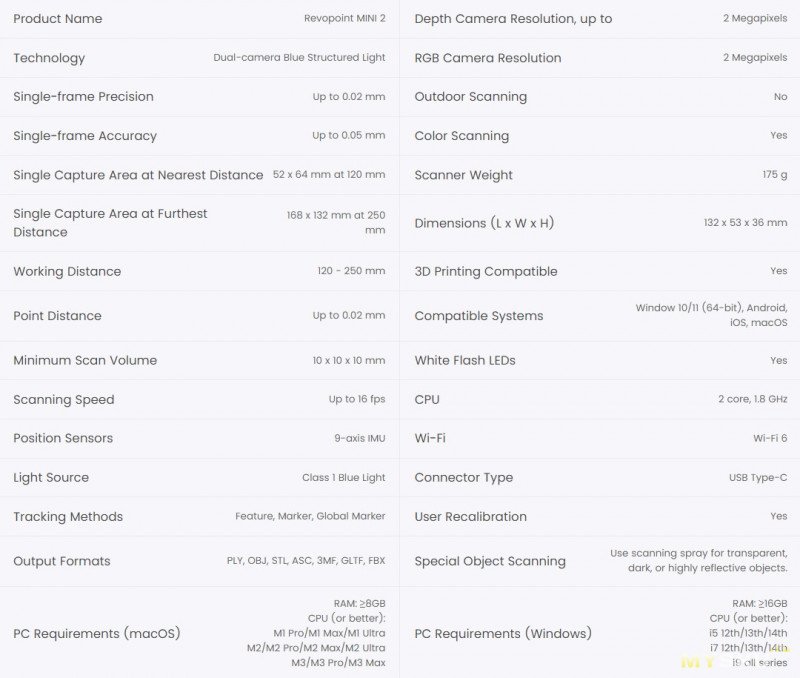
Характеристики
Распаковка и внешний вид
Основная коробка приходит в картонной, её можно видеть на заднем плане. С лицевой стороны изображен сканнер на подставке, сзади напечатана дополнительная информация о производителе.


В ней находится кейс с жестким каркасом и отделкой, напоминающей мягкую кожу.

Внутри он поделен на две секции, одна из которых отделена перегородкой.


В основной размещен сканер, штатив, поворотный стол и тестовый бюст. Во второй спрятаны калибровочная панель, большой кусок темной ткани с маркерами, круглый виниловый диск для стола, комплект самоклеящихся маркеров для крупных деталей, Type-C кабель для подключения к ПК, еще один с дополнительным питанием для телефона, холдер, переходник USB-A — Type-C, инструкция и гарантийный талон.


Корпус сканера алюминиевый, на лицевой стороне по бокам находятся две камеры для построения карты глубины, цветной сенсор для наложения текстуры, в центре расположено окошко проектора с синим излучателем. В нижней части разместили башмак для крепления на штативе или холдере телефона.


Сзади есть три кнопки, центральная запускает или приостанавливает процесс сканирования, боковые корректируют экспозицию. Это удобно при использовании в связке с телефоном. Слева Type-C разъем с двумя индикаторами, отображающими текущий режим и процесс передачи данных. Сначала думал, что где-то отвалилась заглушка, но оказалось, что оба комплектных кабеля могут фиксироваться винтом, предотвращая сбои подключения и деградацию разъема.


В штативе есть несколько дополнительных секций, выдвинув которые можно поднять сканер на высоту до 35 см, что позволит охватить практически всю поверхность небольших деталей без необходимости смещать её на платформе.


Поворотный стол питается только от сети, но может в будущем добавлю в него аккумулятор самостоятельно, благо места внутри полно. Есть возможность выбрать направление и скорость вращения. Диаметр платформы 125 мм, движение плавное, без рывков.


Платформа держится на защелках и для обслуживания её можно снять. Для снижения трения используется конструкция, похожая на шариковый подшипник. За счет этого двигатель без проблем сможет поворачивать довольно увесистые объекты.

Рабочее расстояние сканирования составляет от 120-250мм, но в программе можно увеличить предел до 300мм, вот только при выходе из диапазона по умолчанию, поверхность детали будет не в фокусе и мелкие детали могут потеряться.

В основном креплении и холдере имеется механизм фиксации, так что можно смело наклонять сканер в любых направлениях и не переживать, что он слетит с крепления.


На минимальном расстоянии фокусировки в 120 мм, рабочая область составляет 52х64 мм, на 250мм она увеличивается до 168х132 мм. При максимальных 300мм, практически заполняет лист А4(210×297 мм).

В режиме ожидания проектор заполняет область равномерным синим светом, при активации сканирования, он начинает динамически меняться.

Я снял видео с высокой частотой на телефон. При 480 кадрах в секунду видеоряд должен замедлиться примерно в 20 раз, но этого не хватило, чтобы разглядеть все пять форм, да и скорее всего реальная картина искажается из-за наложения частот.
Тестирование
Для начала нужно скачать и установить приложение Revo Scan 5.
При первом запуске система просит произвести калибровку гироскопа. Владельцы квадрокоптеров сразу вспомнят предполетную подготовку.


Интерфейс начального экрана не перегружен, тут отображаются подключенные устройства и выводится список проектов.

Есть раздел обучения, в котором можно скачать руководство пользователя и посмотреть видео с рекомендациями по настройке и работе.


В настройках сканера отображается информация о модели, производится принудительная калибровка гироскопа, во второй вкладке находятся параметры беспроводного подключения. Сканер может быть как точкой доступа, так и подключаться к домашней сети. Рекомендуется использовать роутер с поддержкой Wi-Fi 6, но и на классических 5 ГГц картинка вполне плавная, а вот 2.4 ГГц сеть использовать я бы не стал, там уже слайдшоу.


Основных настроек не так много, задается путь по умолчанию для проектов и скриншотов, выбирается язык, а так же можно разрешить использование видеокарты для ускорения рендеринга.

После нажатия кнопки «Новый проект», открывается окно сканирования. Тут первым делом нужно обратить внимание на индикатор фокуса в правой части экрана. Зеленые столбики показывают на каком расстоянии расположена обнаруженная поверхность относительно оптической системы. Нужно расположить деталь так, чтобы шкала находилась в пределах отметок «Отлично» и «Хорошо». Это обеспечит максимальную детализацию модели.
Немаловажным является и правильная экспозиция.
Слева необходимо следить за экспозицией кадра. Автоматический режим в большинстве случаев спасает, но иногда невозможно обеспечить равномерный фон и приходится выставлять её вручную. Красные зоны свидетельствуют о пересветах поверхности, синие о недостатке освещения. Обратите внимание на превью в центре, в красных зонах возникает приличный шум.

Нужно добиться такого значения, при котором деталь будет равномерно светлой с минимальным количеством цветных маркеров, чего там с фоном в кадре уже не так важно. Затем можно увеличить и покрутить превью, чтобы убедиться в отсутствии крупной ряби. Так же при желании можно использовать масштабирование до 2Х для исключения лишних предметов из кадра.

Настройки сканирования по умолчанию обеспечивают максимальную детализацию модели, но в зависимости от вашего проекта, их можно откорректировать для ускорения процесса обработки. Чуть ниже есть подсказки по каждому пункту.

Не буду их переписывать своими словами, просто скину скриншоты.


Нажимаем на кнопку пуска в программе или на корпусе сканера и ждем, пока вся видимая поверхность нашей детали не окрасится зеленым цветом. Центральную часть можно свободно вращать в процессе для осмотра каждого уголка. Достаточно одного полного оборота, дополнительные без изменения ракурса не принесут пользы, а только замедлят процесс обработки. Ставим на паузу.

Поворачиваем модель на бок и снова жмём "начать". Сначала система сообщит о проблемах с позиционированием, но через несколько секунд алгоритмы просчитают новое положение.

Ждем еще один оборот и внимательно осматриваем результат. Если пропустите какую-то область, ничего страшного, в любой момент можно будет добавить ракурсов, но желательно не трогать рабочую область, чтобы условия съемки не слишком сильно отличались.

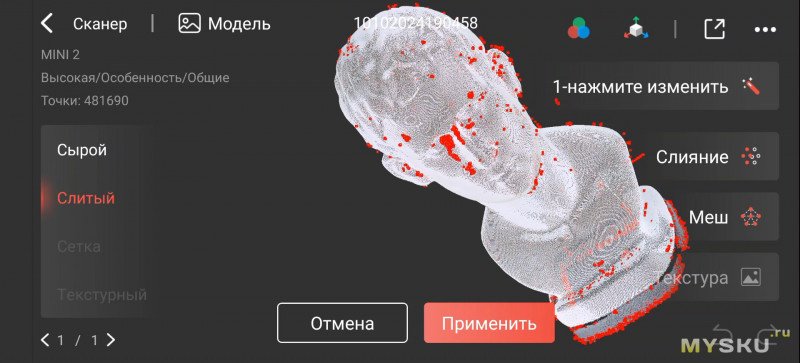
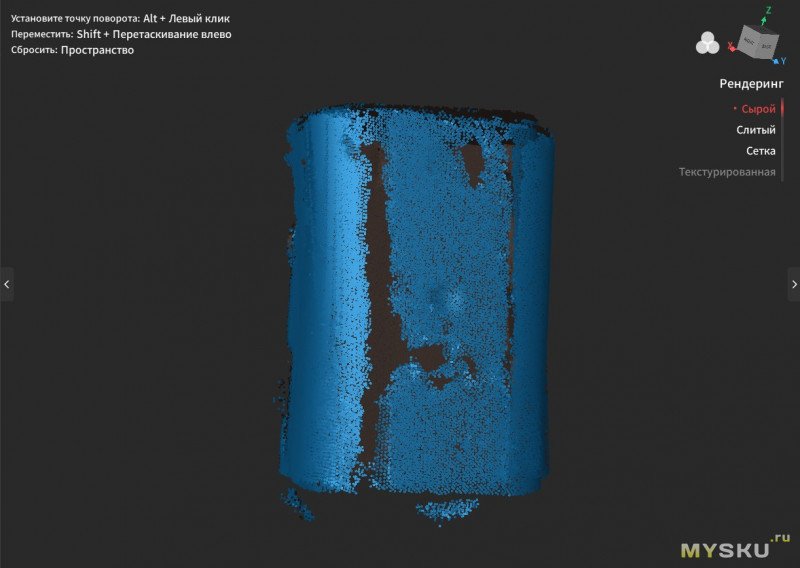
Далее нажимаем выполнить и получаем облако точек, которые сформировались из множества снимков.

Далее можно либо воспользоваться «волшебной кнопкой», которая сама определит степень детализации по полученным 1030 кадрам и выполнит несколько этапов обработки автоматически с оптимальными параметрами, указанными в правой части. Это экономит время при воссоздании крупных элементов с низкой детализацией.

Но я предпочитаю проходить через все этапы вручную, так что перехожу в пункт "объединение облака точек", в расширенном режиме выбираю минимальное расстояние между точками 0.05 мм и нажимаю применить. Через 2-3 минуты получаем вполне достойный результат, а в информации начинают отображаться не кадры, а количество полученных точек, в моем случае это 3 с лишним миллионов.

А где же обещанные 0.02мм, спросите вы? Они доступны в стандартном режиме, вот только процесс занимает раза в два больше времени, количество точек возрастает до 18 миллионов и внешний вид получается не такой аккуратный, т.к. не отсеивается лишний шум.


Слышал, что для работы с подобным оборудованием нужен довольно мощный ПК, но в основном страдает процессор и оперативная память. При чем ЦП отвечает только за скорость обработки, а вот если закончится ОЗУ, задача прервется. Благо не весь прогресс сбрасывается, а только последняя задача.

На этапе изоляции это всё убирается до приемлемого уровня, потом разглаживается, исключаются совпадения и становится намного лучше.


Потом натягиваем сетку и получаем вполне адекватную модель. Но стоит ли оно того?

Давайте вернемся к расширенному режиму и перейдём в изоляцию. Тут подсветилось гораздо меньше мусора.

Сразу же уберем и излишки, которые сформировались из-за отражения платформы. Выбираем любой удобный инструмент выделения и нажимаем Del на клавиатуре.

Следующий инструмент обнаруживает совпадения поверхностей, в моём случае проблем нет.

При желании можно сгладить поверхность. Может быть полезно если на оригинале есть какие-то царапины или загрязнения, которые не удалось устранить механически.

Главное не переборщить, чтобы детали не залило.


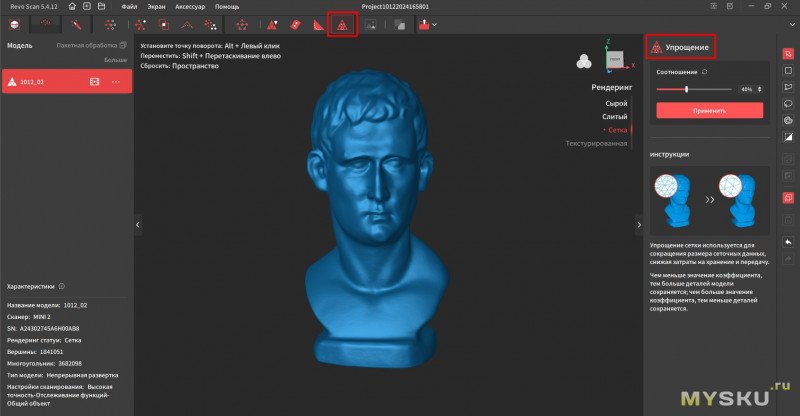
Ну и «упрощение» сокращает количество точек, чтобы уменьшить размер проекта и ускорить дальнейшую обработку. В моем случае упрощение даже на 30% практически никак не повлияло на качество, но я бы сильно не увлекался, тем более на этом этапе, потому что это еще не конец.

Да, модель уже выглядит отлично, но если увеличить масштаб, мы вспомним, что она целиком состоит из точек, ничем между собой не соединенных

Чтобы получить полноценную поверхность, необходимо перейти во вкладку "Конструкция сетки", выбрать степень детализации. Минимальный шаг при ручной регулировке составляет 0.06 мм, если нажать на кнопку со стрелками, система подберет этот параметр автоматически, при чем он может быть как больше, так и меньше ручного минимума. В данном случае автоматика предлагает вообще 0.1мм из-за отсутствия мелких деталей, поэтому я не вижу смысла ставить на начальном этапе расстояние между точками 0.02мм и ждать намного больше обработку на следующих. Нажимаем применить и получаем поверхность без пробелов.

Далее снова можно прогнать изоляцию на случай, если повылазило чего лишнего.

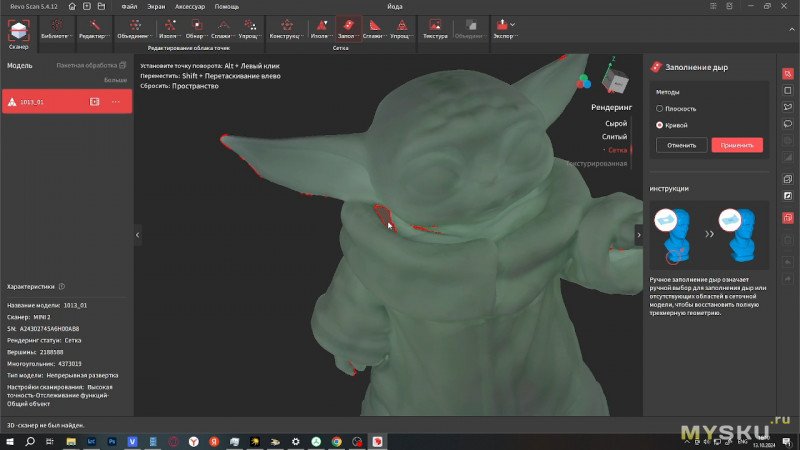
Я только один раз повернул деталь, поэтому сканер не смог воссоздать участок в месте прилегания к платформе и получилось небольшое отверстие. Но это не проблема, ведь есть инструмент заполнения дыр, который даже в автоматическом режиме неплохо находит и заполняет разрывы. При желании можно добиться результата получше, но мне и так пойдет.


На последних этапах можно повторно разгладить и упростить модель. Неактивные кнопки отвечают за накладывание текстуры при цветном сканировании и объединении нескольких частей деталей в единое целое, но сейчас этого не нужно.

Если в процессе обработки возникли какие-то критичные проблемы, типа задвоеных периметров, сложного мусора или дыр, можно нажать правую кнопку мыши и в выпадающем списке выбрать "Редактирование ключевых кадров".

В отдельном окне откроется список всех кадров с возможностью просмотра зоны, которую они формируют и удаления «бракованных» участков.

А еще можно переключиться на отображение сетки, чтобы лучше просматривались неровности.

Вот и всё, если результат устраивает, остаётся экспортировать его.

Оптом сохранять можно в формате ply и obj, но если выгружать только сетку, вариантов становится больше, в том числе stl и 3mf, которые сразу можно кидать на печать.


Каждый проект сохраняется в своей папке, в кэш складываются файлы dph, inf и img если включено цветное сканирование.


Полученный при экспорте файл без проблем закинул напрямую в слайсер. Нижняя площадка оказалась неровной и я сначала думал, что это косяк сканирования, но оказалось, что у оригинала она так же не ровная. Сделал срез, модель внутри не пустотелая, это хорошо, т.к. ранее мне скидывали результат в виде «скорлупы», который был непригоден для работы.


Запустил печать и получил точную копию, только другого цвета. Точки сзади это следы от поддержек, не обращайте на них внимания.


Даже все косяки на месте, на оригинальном бюсте счесана левая сторона за ухом и на правой брови есть вкрапление. На оранжевом они не так бросаются в глаза, но если присмотреться, заметны.


При использовании в качестве портативного варианта в связке с телефоном, нужно использовать другой кабель с дополнительным питанием. Отдельно продается штатив-павербанк, чтобы не нужно было таскать в кармане внешний. Из минусов, у такой конструкции пропадает возможность наклонять сканер и в большинстве случаев придется держать его в руках.


Мобильное приложение Revo Scan скачивается из плеймаркета, интерфейс относительно привычный, имеется монохромное и цветное изображение для оценки освещенности, полоса фокусировки перенесена в верхнюю часть.

Настройки такие же, как и в основной программе, просто разнесены по разным кнопкам.


Сканирование запускается кнопкой на дисплее, либо на корпусе устройства, после чего нужно перемещать штатив для равномерного окрашивания детали и при этом стараться выдерживать оптимальную дистанцию. Поначалу это не так уж просто, но со временем привыкаешь, да и система прощает незначительные ошибки.

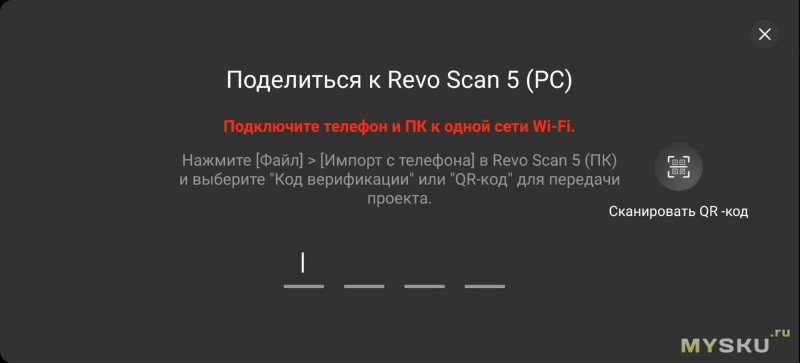
Далее приложение предлагает перенести проект на ПК для дальнейшей обработки, но мне было интересно, можно ли от начала и до конца обойтись без компьютера.

Так что пошел по порядку: слияние облака точек, изоляция лишних.

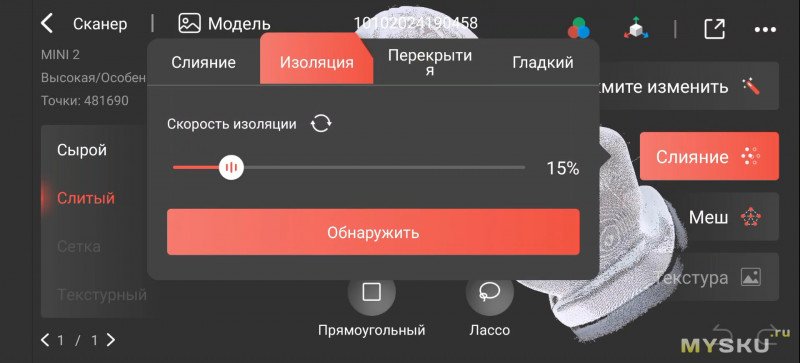
Мусора не так уж много, учитывая, что снимал на весу. Очистилось без проблем.

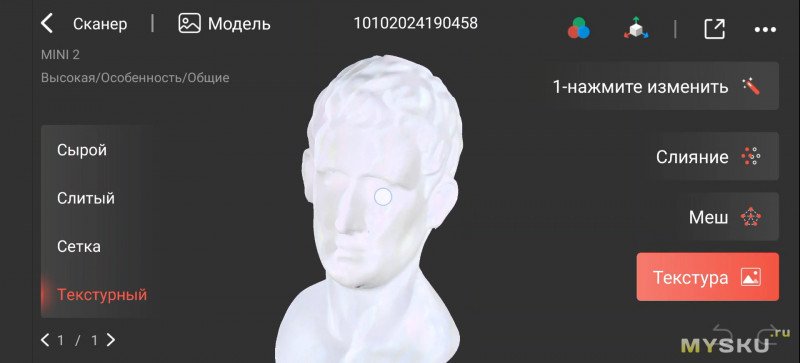
Я включил цветное сканирование, так что помимо сетки накинул еще и текстуру. Не очень удачный пример получился с абсолютно белой деталью, но всё же результат очень неплохой. Обратите внимание, в мобильном приложении можно выставить шаг сетки 0.03мм (максимальное качество 7).

При этом проект всегда можно передать на ПК и начать заново с любого этапа.


В основной программе нужно нажать "Файл" — "Импорт с телефона" и сформировать код.


Далее вводим его в телефоне и ждем окончания передачи данных.

Но комплектная модель довольно простая, с плавными переходами и гладкой, но относительно матовой поверхностью, к тому же из-за размера в любом положении остается в фокусе. Давайте усложним задачу и возьмем что-то крупнее, а так же сформируем текстуру. Выставляем сканер по высоте, прогоняем модель стоя, ставим на паузу, затем кладем на бок, чтобы заполнить пустоты с нижнего ракурса и сформировать закрытую подставку. Нажимаем продолжить и получаем косячные данные, т.к. дно платформы слишком сильно перекрывает кадр и системе просто не за что зацепиться для определения положения детали.

Так что мало выдержать расстояние и экспозицию, нужно заранее понять при каких ракурсах анализ будет затруднен и избегать их. В случае Йодой достаточно было выдвинуть штатив и приподнять сканер. Все получилось с одного захода и две паузы.

Шаг точек поставил 0.05мм, хотя можно было так не заморачиваться, ведь сканировал я напечатанную на ФДМ принтере модель и высокой детализации точно не будет.


Система высчитала, что достаточно будет сетки размером 0.11мм, не стал спорить.

Двумя кликами заполнил дыры.

И окончательно зафиксировал текстуру. Окрашивание вершин понравилось меньше.


Выгрузил получившуюся модель и сравнил с начальной. Да, мелких деталей не так много, но нужно учитывать, что это скан распечатки.

Вот используемый образец ближе. Видно, что он так же не дотягивает до оригинала.


Нашел небольшую фигурку с большим количеством небольших элементов. На слепке детализация несколько хуже, но ничего не пропустило и не замазало.


В случае с мелким дракончиком, система позволила снизить шаг сетки до 0.04мм.

Вот так он выглядит вживую на фоне получившегося «слепка».

Шестерня обернулась с минимальным шагом сетки 0.02мм. Расстояние между вершинами зубьев 1.5 мм, нижнюю часть не сканировал. Сканировал уже напечатанную деталь и точки на поверхности это следы от поддержек, которые на светлой поверхности я не заметил глазом. Визуально высоту зубьев поело от основания, так что для полноценного дублирования мелкоты данный метод скорее всего не подойдет, но можно использовать такой черновик для подгонки создаваемой модели.

Крупный слепок создавал комбинированной съемкой, сначала сделав круг с неподвижным штативом, а затем взял сканер в руку, плавно переместился в верхнюю точку и подождал пока платформа совершит полный оборот. Тут главное научиться держать дистанцию и понимать, есть ли за что зацепиться при смене ракурса. Думал будет сложнее.


Статуэтку обрабатывал на предлагаемых системой настройках, просто прожал по порядку всё кроме сглаживания и упрощения. Но вот на начальном этапе возникли проблемы. Дело в том, что основание руки высокое и на рекомендуемой дистанции в кадре нет деталей, за которые может ухватиться алгоритм. Пришлось поднять сканер так, чтобы цепляло и лицо и платформу, при этом верхняя часть была в зоне «слишком близко», а нижняя «слишком далеко». Учитывая низкую детализацию оригинала, на это можно не обращать внимания.

Но для получения идеального результата, стоило использовать маркеры на нижней части, чтобы сканер цеплялся к ним, а не структуре детали. Я тут немного переборщил, оптической системе достаточно 4 штуки в поле зрения, чтобы не терять позиционирование.

Лицо портить не хотел, так что отсканировал его в стандартном режиме как отдельную деталь внутри одного проекта. По-хорошему производитель рекомендует так и поступать при повороте детали, но меня устраивает как система подстраивается «на лету» после снятия с паузы.


Если использовались маркеры, при объединении облака точек можно сделать вырезы в месте их нанесения, чтобы потом проще было заделывать ровные отверстия.

После начальной обработки активируется пункт "Объединение моделей".

Можно попробовать совместить детали в автоматическом режиме, опираясь на совпадения структуры и в большинстве случаев получается вполне неплохо.

Но если детали были изначально отделены друг от друга или образец разбит, придется собирать её вручную, указав маркеры в ключевых точках для скрепления.

После нажатия кнопки "Создать модель", в списке появляется позиция с именем "Merge", которую можно довести до ума: натянуть сетку, изолировать излишки и т.д. Получилось не хуже, чем до этого при съемке одним дублем, при этом возни с основанием не было. Вот только следы от маркера остались видны, так что придется сгладить их позже в другой программе.

Наткнулся на модели универсальных многоразовых маркеров и это просто мастхэв для сканирования, лепишь на них наклейки, расставляешь вокруг модели в нужном количестве и позиция фиксируется намертво.

Результат получается гораздо чище и с меньшим количеством кадров. Далее примеры будут без них, т.к. обнаружил их когда уже собрал материал для обзора.

Научился сохранять модели с нормальными текстурами. Для этого нужно вручную выставлять экспозицию, добиваясь равномерного распределения пересвеченых и недосвеченых областей, либо в типе объекта выбрать «Темный» и она сама задерется на автомате.


После объединения облака точек, динозаврик стал выглядеть чуть счастливее.


В изоляции убираем всё лишнее.

Рекомендуемый размер сетки 0.15мм, что даже меньше, чем я сам хотел поставить, ну ок.

Заделываем дыры, небольшая была на подбородке и одна в основании. Из-за высокой выдержки не хотел смещать игрушку, т.к. был риск поймать блики и начать всё заново.

Натягиваем текстуру и становится совсем хорошо. Даже глаза на место стали.

Как по мне, очень неплохо, затраты времени и нервов минимальны.

При использовании маркеров можно воссоздавать и крупные детали. Я хотел попробовать «оцифровать» корпус PS5, но комплектных наклеек не хватило, чтобы покрыть всю площадь, а перекидывать их по очереди и потом объединять как разные детали то еще извращение. Для таких нужд всё же лучше покупать модель линейки Pop или Range.
Копирование деталей это конечно хорошо, но точности данной модели достаточно для использования в обратном проектировании.
Например, хочу я сделать какое-то электронное устройство с питанием от аккумуляторов фотоаппарата, которых у меня немаленькое количество, либо кастомную зарядку для них.
Берем аккумулятор, закидываем на поворотный стол и понимаем, что ничего не получится. Да, это потому, что он черный и сливается с основанием. Не помогает и выбор темного объекта.


А значит нужно отбелить корпус. Для этого есть много вариантов: если не жалко, можно покрасить из баллончика, заливать не обязательно, достаточно будет мелких светлых вкраплений. Кто-то пользуется тальком, мукой, либо специализированными спреями. У меня даже есть такой, при чем не простой, а исчезающий со временем.


Если честно, ведет он себя очень странно, в одном месте может испариться за 5 минут, в другом за пару часов. На аккумулятор наносил в два слоя, но уже через 10 минут основание начало проявляться, а окончательно следы исчезли спустя 2 часа.

На превью видно, что одна из стенок успела частично «облезть», из-за чего образовались дыры.

Но мне было лень снова идти в мастерскую для повторного нанесения, да и воняет состав не особо приятно.

Так что будем работать с тем, что есть. Самое главное залатать отверстия, чтобы получился замкнутый контур.


А неровности можно разгладить и потом. Я немного потер модель в мешмиксере.

Утопил в стол на миллиметр, чтобы не поднимать на поддержках, а так же сделал деталь пустотелой для экономии смолы.


Вроде похоже.

Проверил размер, практически идеально, не забывайте, что и смола дает небольшую усадку.


В фотоаппарат и зарядное устройство входит как родной, самостоятельно не выпадает.


А если взять что-то еще меньше, например плату и использовать 3д модель для подгонки корпуса создаваемого устройства? В первом случае использовал матирующий спрей, который частично испарился еще в процессе, во втором подождал пока поверхность очистится.


Размер модуля 17.27 х 22.16 мм.


Размер полученной модели 17.25 х 22.22 мм. Думаю разбег получился из-за большого контраста на стыке платы, где текстолит окрасился в белый цвет и засветил кадр.

Решил окончательно измерить точность, используя готовую ровную тестовую пластину с равномерным окрасом. Жаль белой смолы нет, результат был бы еще лучше. Поверхность телесного цвета, так что пришлось выкрутить экспозицию и начало цеплять коврик. Чтобы избежать появления лишних артефактов, можно увеличить картинку. Это цифровой зум, так что не стоит надеяться на повышение детализации, но разница всё же есть.


Я думаю это из-за того, что без лишних предметов экспозиция еще больше поднимается и становятся заметны более темные участки конструкции. Не сказать, что прирост значительный, но как минимум хуже не становится, а значит можно смело пользоваться.


Размер внешнего квадрата по чертежу 20мм, внутреннего 15мм. Во время печати состав дал небольшую усадку, это нормально.


Закидывать в принтер полученный слепок не стал, т.к. усадка исказит картину. Вместо этого измерил расстояние между внешними и внутренними стенками квадрата. Получилось 19.92мм и 14.94мм, погрешность 2-5 сотых. Штангенциркуль у меня не поверенный, так что возможно и больше, но не намного.

Если очень хочется, можно сканировать и людей. Экспериментировал на жене в режиме высокой частоты и расширением фокуса до 300мм, получилось довольно неплохо в плане построения модели, но вот при наложении текстуры получается крипота с глазами в разные стороны ))
Данный образец мне запрещено скидывать в открытый доступ под угрозой развода, так что сделал слепок своего лица. То еще приключение корректировать кадр в зеркальном отражении, засвечивая глаза синим излучателем, так что использовал покадровый режим со стандартной точностью, позиционировал снимок на мониторе и нажимал кнопку спуска на корпусе. Всего сделал 79 кадров с разных ракурсов, ограничившись передней частью головы.

После всех обработок в автоматическом режиме, получилось как-то так. В высокоскоростном режиме получалось гораздо быстрее и не намного хуже по детализации, правда обработка с небольшим шагом занимала довольно много времени из-за большого количества точек в каждом кадре.

Калибровка
Если вас совсем не радуют полученные результаты и алгоритм формирования облака точек ведет себя неадекватно, возможно стоит провести полную калибровку сканера, нажав кнопку в левом нижнем углу Revo Scan. Далее потребуется использовать специальную панель, которая есть в комплекте.

Процесс состоит из нескольких этапов, в каждом из них пользователю нужно будет размещать корпус под определенным углом на заданной высоте и наводиться на указанные точки. Ничего сложного, я еще и скриншоты умудрялся в процессе делать. Только потом догадался, что можно было снять видео и надергать кадры оттуда.


Купон
В данный момент работает купон REXCLUSIVE30, который снижает цену до 93 тысяч рублей, думаю во время распродажи 11.11 увидим цену ниже 80 тысяч.

Итоги
Устройства для детализированного 3Д сканирования хоть и стоят не очень дешево, но все равно стали доступнее. Пару лет назад я облизывался на модели с точностью 0.1мм и стоимостью 300 тысяч рублей, а тут облако точек с шагом 20 микрон, да и сам процесс стал гораздо проще. Я даже уроки не смотрел, распаковал, минут 10 потыкал все кнопки пока мучил тестовый бюст и особо вопросов не возникало. Но давайте распишу плюсы и минусы по порядку:
+ Минимальное расстояние между точками составляет всего 0.02 мм, погрешность геометрии 0.05 мм, в точности я лично удостоверился во время тестирования, сравнив размер исходной и полученной модели.
+ Скорость сканирования от 8 кадров в секунду в режиме с повышенной выдержкой(темный объект), 13 кадров в секунду в высокоточном и 16 кадров в секунду в высокочастотном. Чем выше частота, тем быстрее можно проходить по поверхности без разрывов геометрии и потери трекинга.
+ Поддержка беспроводной сети. Данная модель поддерживает Wi-Fi 6, но и на WiFi 5 я не заметил каких-то отличий от проводного подключения. Вставляешь в павербанк и можно спокойно перемещаться по комнате. Я использовал обычный Type-C кабель удобной мне длины.
+ Программное обеспечение переведено на русский язык, интуитивно понятно и работает без нареканий. Нагрузка на ПК при этом не очень большая. На этапе объединения облака точек, мучает в основном процессор, а при накладывании сетки начинает жрать оперативную память при большом количестве точек. Видеокарта практически не используется, хотя галочка в настройках имеется, только на этапе сканирования нагружается в пределах 20%. При правильном подходе результат получается отличный без особой возни и в любое время можно откатиться на предшествующие этапы, в том числе удалить неудачные кадры и добавить новых повторным сканированием, либо сформировать дополнительную модель для объединения и перекрытия пропущенных областей.
+ Есть полнофункциональная мобильная версия, которая требует больше времени для обработки, но в итоге получается не намного хуже, разве что не очень удобно работать с обрезкой на маленьком экранчике и можно пропустить какие-то небольшие косяки. Так же можно экспортировать проект напрямую в ПК версию и продолжить обработку там. При сканировании на весу, пользоваться телефоном намного удобнее, т.к. они со сканером находятся в одной плоскости и ракурс смещается более предсказуемо.
+ В стандартном комплекте помимо проводов есть неплохой поворотный стол с регулировкой направления и скорости, штатив с регулировкой высоты, холдер для телефона, дополнительная круглая пластина с маркерами, тряпка, «жвачка» для горизонтальной фиксации деталей с узким основанием. По сути ничего больше докупать не нужно, я поглядываю на двухосевой стол.
Минусов как таковых я даже не могу придумать, разве что всё еще высоковатую цену, но ближайший конкурент это раптор от креалити, который стоит 100+к и лично мне их ПО не нравится. Хотя может уже довели до ума.
Зато есть особенности, о которых стоит напомнить, чтобы потом не было разочарования:
* Линейка Mini предназначена для точного сканирования небольших объектов. Да, при использовании маркеров можно сформировать большую площадь, а если оперативной памяти мало, просто сохранять её небольшими кусками и потом сшить, но честно говоря, «срисовывать» её областью 16х13 см такое себе удовольствие. Для более масштабных задач стоит посмотреть в сторону более дешевого Pop3(до 24х18 см, шаг 0.05мм) или Range(до 86х138 мм, шаг 0.1мм).
* По логичным причинам 3Д сканеры плохо считывают черную и отражающую поверхность, так что детали нужно будет матировать и отбеливать. Есть как дешевые способы типа талька, гуаши, так и дорогие в виде специальных спреев, состав которых либо легко стирается тряпкой, либо исчезает самостоятельно. Я покупал 400мл за 1500 рублей и это не самый дорогой вариант.
* При сканировании крупных объектов с гладкой поверхностью, нужно пользоваться комплектными маркерами, т.к. оптической системе нужно за что-то цепляться для позиционирования геометрии. Люто рекомендую напечатать многоразовые модули, которые можно россыпью накидывать вокруг. Жалею, что раньше на них не наткнулся, сэкономил бы много времени и наклеек. Поначалу в основном пользовался отслеживанием по деталям поверхности, но оказалось, что маркеры очень удобная штука и хуже не сделают даже если думаете, что они не нужны.
Как всегда, приветствуется конструктивная критика в комментариях. Всем добра =)
| +72 |
3586
152
|
| +70 |
3475
79
|
p.s. Не увидел Ваше упоминание об этом девайсе.
Просто тут, скажем так, результат не то чтобы совсем сильно впечатляет, особенно что касается шестерёнок. Девайс по цене равняется топовому смарту, ну может прошлогоднему флагману.
То что я на видео в ютьюбе смотрел, выглядело вполне неплохо, но, понятно, без сравнения «в лоб» на одних и тех же же объектах не скажешь.
Точности хватает, чтобы при приближении обнаружить точки, сформированные от мелких частичек пыли, приходилось протирать и продувать некоторые образцы.
С шестеренкой проблема в том, что при повороте соседние зубья перекрывают обзор друг другу и оптической системе проблемно формировать отпечатки в этих зонах, поэтому основание поело, подобный эффект проявляется и при использовании более совершенного оборудования. Вершины же получились хорошо, как и мелкие дефекты.
Тот же Pop3 стоит как смартфон с лидаром, а детализация получится гораздо лучше. Но фотограмметрия всё равно интересная тема и даже при помощи бюджетного телефона можно делать общие планы средних объектов, в том числе текстурированные. Для технички сразу нет, т.к. соответствие размеров будет не очень.
Фотограмметрия — восстановление объекта по фотографиям, а лидар непосредственно измеряет расстояние до поверхности.
Не знаю какие современные андроид телефоны имеют лидар на борту. Самсунг из своих топовых телефонов его убрал. У меня была последняя модель с сенсором и в общем я намучался со сканированием. Оно все никак не могло завершиться, понадобилось куча попыток, чтобы хоть какой-то результат получился.
Помню я с помощью зеркалки с фиксом пытался 3д модель своего авто получить. Если сильно не приближать, получилось даже неплохо, вот только возился на улице и пока делал один круг, менялось освещение, так что кузов пятнами пошел(еще и краска хамелеон).
Ну и точность размеров конечно никакая )
Геодезисты тем же Metashape профессионально пользуются. Сантиметровая точность — не проблема. Учитывая, что размеры сцен там могут составлять сотни метров — весьма не плохо.
Но задумался и решил проверить. Попробовал на скорую руку накидать пример.
Да деталька не оптимальна для такой проверки, фотографировал как попало на телефон (большинство снимков получились со смазами), да и я в этой теме на уровне «поиграться», так что вероятно много чего не оптимально сделал. Кстати, модель масштабировал, указывая расстояния между маркерами (измерял обычной линейкой). И конечно же будете правы, если заметите, что так не корректно измерять деталь.
Тем не менее этого примера достаточно. Получившееся у меня отклонение около 1%. И думаю, что при должном подходе к процессу можно повысить точность как минимум на порядок.
Но я с вами согласен, что этот метод плохо подходит для технических деталей. Но не из-за точности, а из-за ограничений по построению частично или полностью закрытых пространств – то что у вас хорошо показано на примере шестерни.
Кстати, я понял, что в случае с шестерней неправильно позиционировал оптическую систему, из-за чего перекрытие оказалось больше, чем могло. Стоило отодвинуть сканер чуть дальше, отцентрировать и увеличить картинку. На днях делал фигурку, у которой сбоку шестерня выпирала, и зубья получились гораздо лучше, несмотря на то, что пользовался матирующим спреем, который немного сглаживает поверхность.
Как я уже говорил, геодезисты профессионально используют метод и его точность достаточна. Но по удобству и скорости, фотограмметрия конечно значительно уступает сканерам.
Отлично!
Но мы с вами понимаем, что остаётся немало случаев, когда сканером сложно подлезть, чтоб получить пригодный результат. Что уж говорить о фотограмметрии…
Простая конфигурация:
Центральный процессор: 4 — 12 ядер, производитель Intel, AMD или Apple, частота от 2.0 ГГц
Оперативная память: 16 — 32 Гб
Графический процессор: производитель NVIDIA или AMD, от 1024 и более унифицированных шейдерных ядер
(Например: GeForce RTX 2060 или Radeon RX 5600М)
Для тех кто хочет поиграться в 3D сканирование на бюджетном уровне — покрутите модель перед камерой смартфона со всех сторон, а обработку съемки сделать в программах Agisoft Metashape или Pix4DMapper. Обе предлагают демонстрационный период
Когда человек делает кучу снимков на телефон или фотоаппарат, а алгоритмы уже сами додумывает геометрию, это фотограмметрия. И там и там данные получены с помощью камер, но есть нюансы )
Я отдавал от 1500 рублей за небольшую деталь с относительно несложной геометрией. Если оператору требовалось повозиться: менять ракурс несколько раз и чего-то лишнего тыкать в программе, выходило 3-5 тысяч. Во время тестирования понял, что у меня результат получается не хуже, а если заморочиться и помучить модель в мешмиксере/блендере, то еще лучше )
А если реально нужно сделать модель чего-то маленького и нужна детализация, то можно поискать стоматологический 3D-сканер. Там и разрешение 1-2 микрона и цены от миллиона, но договориться с ортопедом для разовых съёмок не в пример дешевле выйдет ;)
Помню как креалитискан бесил своими сообщениями о нехватке оперативки, в то время как она использовалась на 30% )
Про оперативку, такое могло быть и из-за 32-битного приложения или его библиотек, виндовое ограничение памяти на процесс.
CloudCompare скачал, нужно будет гайды почитать что дают все инструменты, думаю новичкам тяжеловато будет осваивать. Но выглядит интересно, нужно разобраться и пользоваться. Спасибо за совет )
Видеокарта по показателям вообще практически не работает, возможно нвидиа не подхватывается. Помню сталкивался с ПО, рендер с GPU в котором только с красными картами работал.
А разве это не структурированный свет как у обозреваемого или у вас отдельно стоят камеры и проекторы? Я, кстати, видел интересное решение из нескольких камер с фиксированным фокусом и проектора, который транслирует видео с двигающимися полосками, говорили результат отличный получается за счет высокого качества нормальных матриц, но с настройкой возни много и софт специфичный. Да и не портативно ни разу получается конечно.
Интересно как обеспечивается глубина больших объектов, с учетом небольшого разноса камер друг от друга.
Да и техничку черновую можно быстро накидать, буквально пара минут и есть слепок платы, для которой нужно выделить место в проектируемом корпусе. Подогнал, булевыми вычел поверхность и паз готов с учетом высоты элементов.
А и плевать в большинстве случаев. Техничка всегда обладает такой штукой как сопрягаемый поверхности, они всегда имеют простую геометрию, потому что по ту сторону инженера тоже не дураки сидят рассчитывать сопряжение поверхностей высокого порядка.
Плюс очень опять же помогает тот факт, что детали(пока) рисуют такие же живые люди, которые любят круглые размеры(иногда правда они зачем-то используют имперскую систему. Таких людей мы не любим и не уважаем), любят касательные к дуге и всякие такие элементы, которые определяют сами себя. И в итоге обычный радиусный шаблон за 150р позволяет с достаточной точностью эти криволинейности воспроизвести. Опять же если речь не идёт о художке
Я вот для подобных целей в последнее время и делаю мастер формы. И они зачастую декоративные, прямых линий минимум )
Насчёт вулканизации не понял. Обычно же просто заливают гипсом распечатку, вытапливают пластик из формы и пока она горячая — заливают металл. Ещё на ютьюбе видел прикольнный вариант создания формы для всяких сложных геометрий — распечатку обмакивают в некую жидкую керамику и потом просыпают кварцевым песком. И так несколько раз подряд. На выходе получается очень прочная скорлупа, которая прекрасно держит нагрев и при этом хорошо заполняет все полости(т.к. эта самая жидкая керамика весьма жидкая).
Насчет керамики разговаривали, но заморочек много. В случае с резиной вулканизируется за раз 20 форм )
Ну не было на алике нормальных книжек на мою трубку, пришлось морочиться.
Правда в итоге, после всех экспериментов, самым удобным и надёжным вариантом оказалось купить копеечный полиуретановый чехольчик и наклеить на него крышку. Пользуюсь до сих пор, недавно вот заново крышку печатал, старая уж очень истрепалась.
Это ж можно сканировать морду лица людям, чтобы после кончины дешево и сердито лепить им памятники в масштабе 1 к 1
Да можно и полностью отсканировать, в том числе с текстурой, чтобы в будущем памятник и раскрасить правильно. Но при использовании mini 2 это будет муторно, у него упор на высокую точность, а оно в данном случае не особо надо. Вот Pop 3 лучше справится и стоит вдвое дешевле. Им можно уже заморочиться со сканами кошек, людей и прочих животных )
Хотя вот эту шестеренку я бы все же отсканировал, но с обратной стороны, т.к. там извращений наделали. Но не редактировал бы полученный слепок, а использовал его геометрию для построения шаблона.
Сейчас попробовал STL крупный закинуть — солид его открыл, но вот графику в тело сетки не смог преобразовать, подавившись оперативкой ))