Storm32 - бюджетный 3-х осевой подвес

- Цена: $68.77
- Перейти в магазин
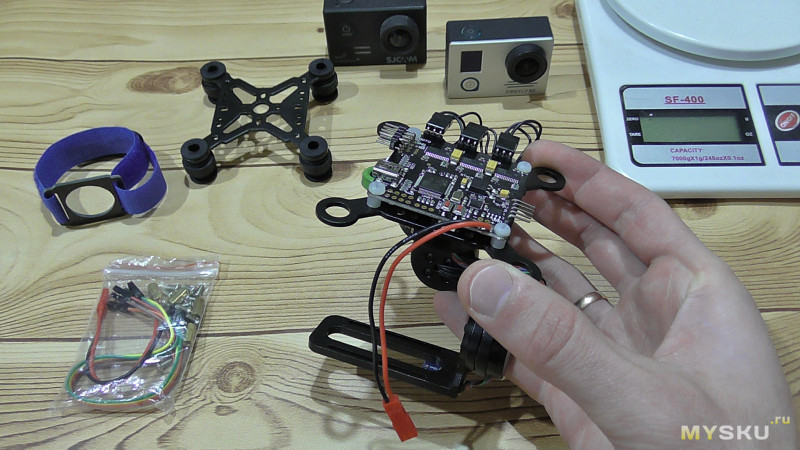
Здравствуйте, в этот раз рассмотрим бюджетный 3-х осевой подвес для RC модели в моем случае он будет установлен на квадрокоптер «Cherson CX-20».

Вот такая скромная коробочка была запакована в почтовый пакет.

Комплектация:
— подвес;
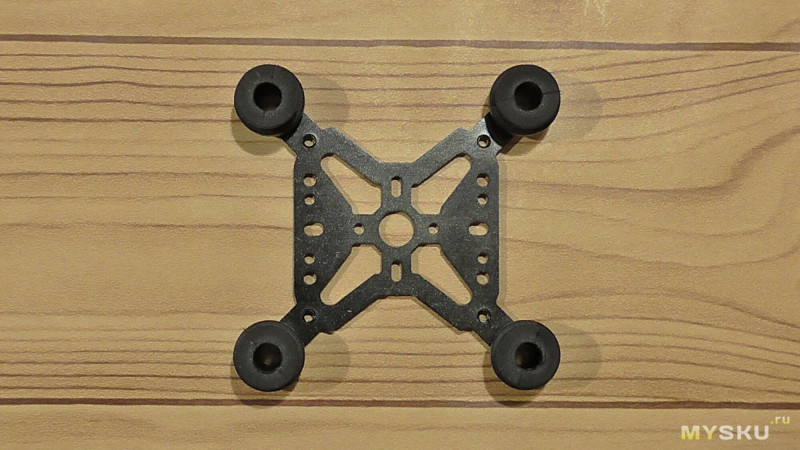
— крепежная площадка с демпферами;
— крепеж камеры на подвес;
— болтики для крепежа подвеса на раму модели;
— провод из штекером JST;
— шлейф из пяти проводов для управления с аппаратуры подвесом.
Характеристики:
— процессор: STM32F103;
— гироскоп и акселерометр MPU6050;
— драйвера моторов DRV8313
— моторы бесколлекторные;
— размер крепежной площадки — 60х60мм
— полная высота подвеса — 120мм
— вес — 197грамм.
— питание подвеса — 10-18V,
— подвес работает на три управляемые оси;
— моторы БК
— материал рамы подвеса — металл;
— возможность настройки работы подвеса через ПК
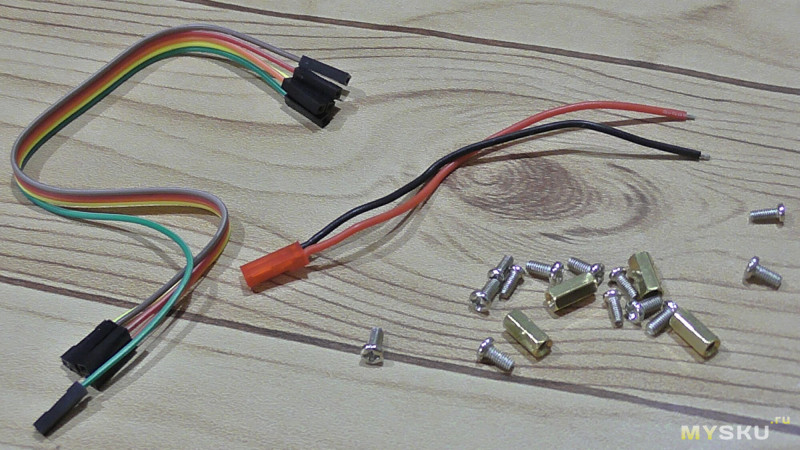
Провод из штекером JST можно припаять к распределительной плате питания RC модели, таким образом мы можем за питать подвес.
Шлейфом из пяти проводов можно соединить подвес из приемником радиоаппаратуры и таким образом получить управления наклонами камеры.

Металлическая площадка из силиконовыми демпферами крепится на раму например квадрокоптера, а затем к ее демпферам крепится весь подвес.

В комплекте получаем ремешок для крепежа камеры на площадку подвеса.
На ремешке карбоновая пластинка с диаметром отверстия 22мм.

Рассмотрим основные детали на которых собран данный подвес.
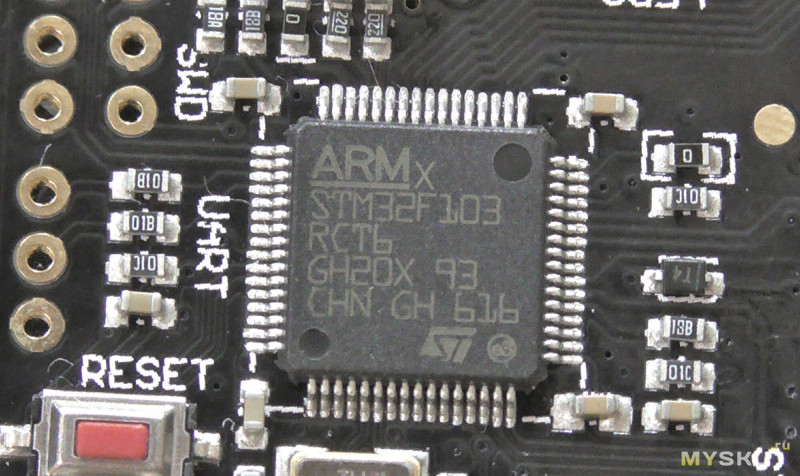
Подвес работает на 32-х битном микроконтроллере STM32F103 который часто можно увидеть у программируемых устройствах.
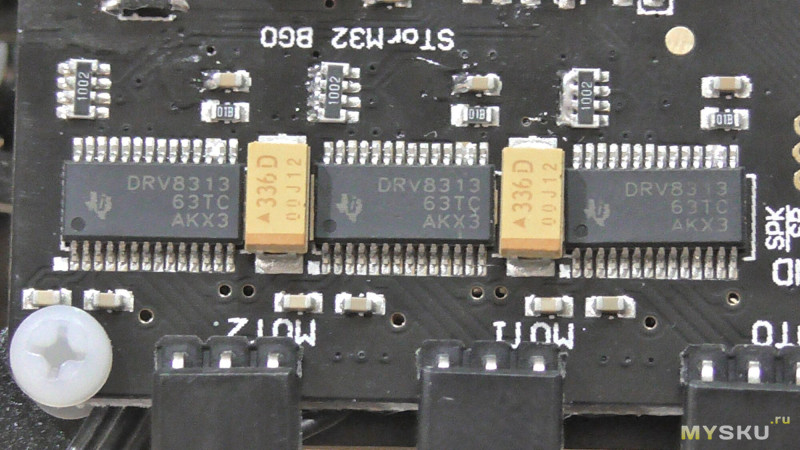
Моторами подвеса управляют три драйвера в микросхемах DRV8313

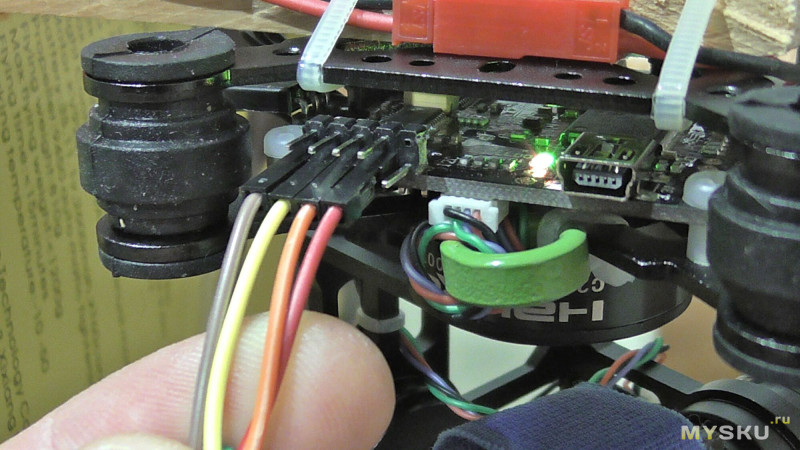
На плате имеется гнездо mini USB которое предназначено для соединения платы подвеса с ПК.
То есть, скачав нужную программу можно настроить подвес на свои параметры, но замечу что данный подвес «Storm 32» не плохо работает из коробки.
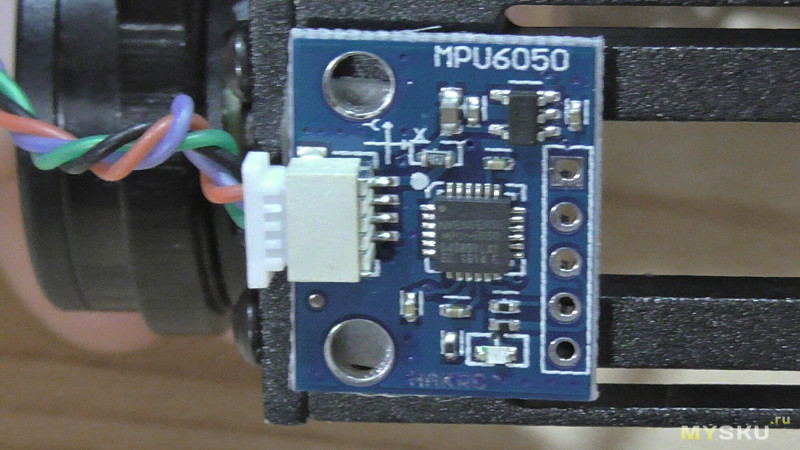
За стабилизацию оси «X» и «Z» отвечает акселерометр и гироскоп на микросхеме MPU6050
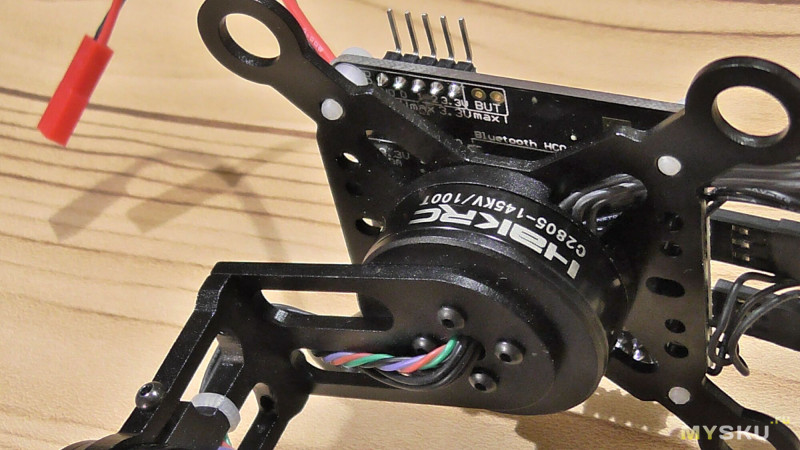
За повороты подвеса по оси отвечает бесколлекторный мотор С2805 145Kw.
Наклоны камеры исполняют два бесколлекторных мотора 2206.
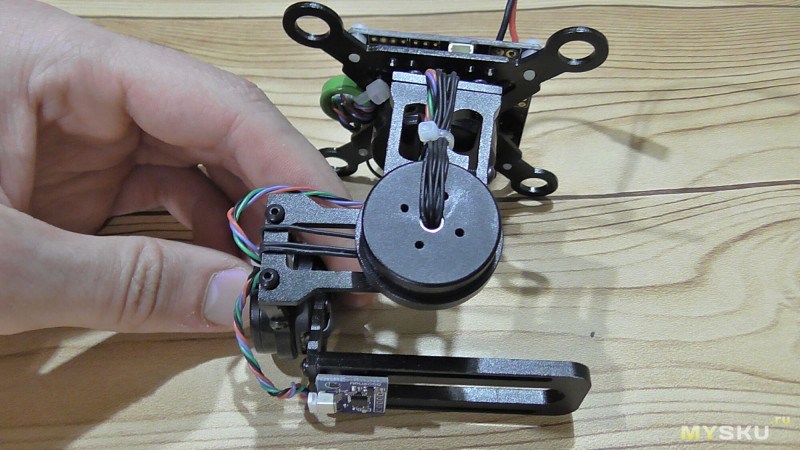
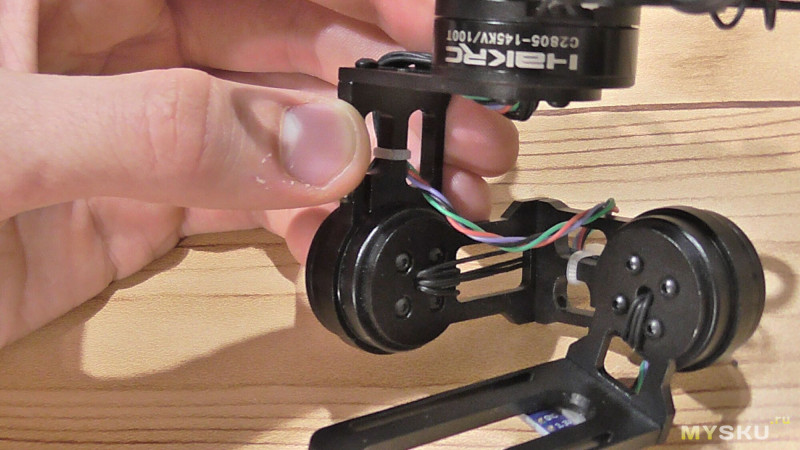
Конечно все сделано отлично, провода заложены в каналы и проходят сквозь моторы, это конечно хорошо, но провода слишком натянуты и боюсь если подвес резко дерниться то может отсоединится провод идущий к плате MPU6050.

Вес подвеса — 197грамм. что является не плохим результатом для 3-х осевого подвеса на металлической раме.

Красивая ровная картинка с камерой FireFly S6 будет весить в 277грамм.

Пора проверить подвес)))
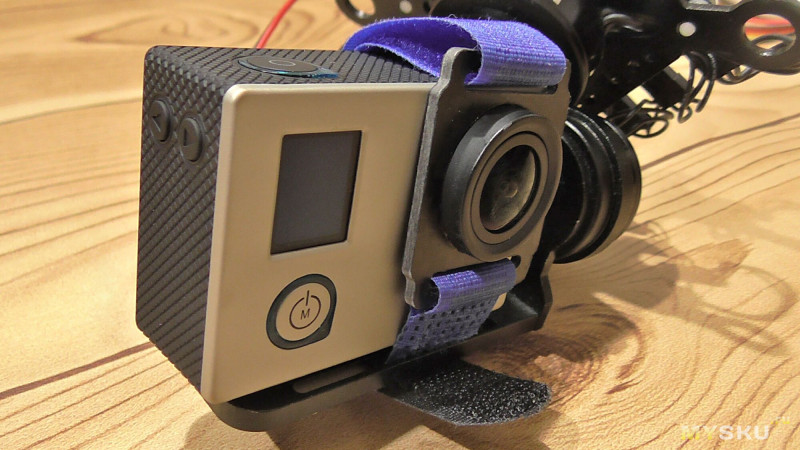
Вот еще косяк, крепежный ремешок для камеры слишком длинный при этом я его сильно не затягивал.
Во время подключения подвеса его лучше не тормошить так как идет инициализация (10-15ск.) после этого подвес сигнализирует кратким сигналом о готовности к работе.
Подключаем управления подвесом через радиоаппаратуру:
— коричневый провод — общий минус;
— желтый провод — наклон камеры вверх-низ;
— оранжевый провод — наклон камеры на право-налево;
— красный провод — вращение камеры по оси (YAW).
То есть, коричневым проводом соединили минус подвеса с минусом приемника.
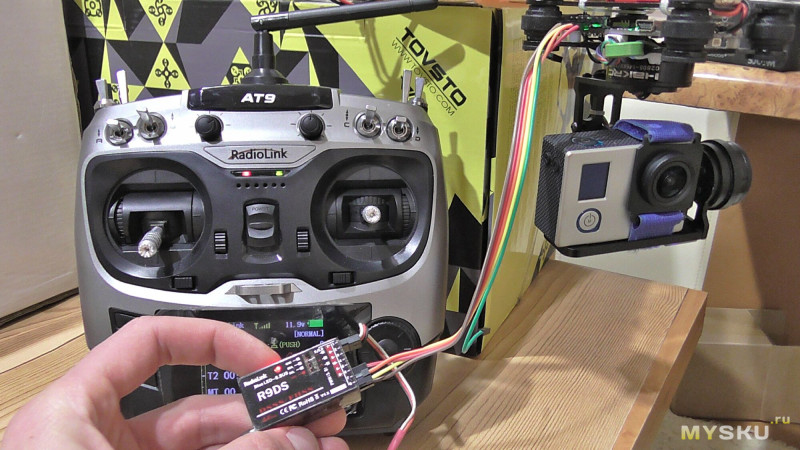
Остальные сигнальные провода для подключения к свободным каналам приемника радиоаппаратуры, но не обязательно их все подключать, например мне нужен только наклон камеры вниз-вверх знач подключаем только желтый провод, при этом минус всегда соединен.
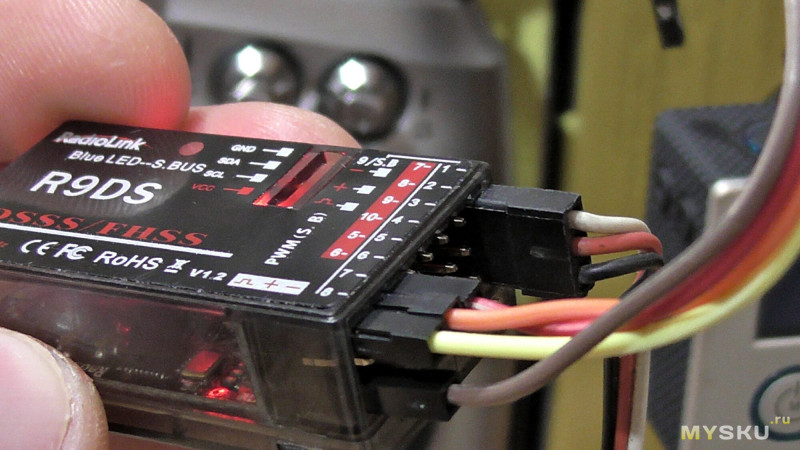
Пример соединения на приемнику радиоаппаратуры «RadioLink AT9»
Пора уже его на квадрокоптер цеплять)))
Рекомендую к просмотру видео где я постараюсь подробно рассказать о подключении подвеса к радиоаппаратуре.
Установка и подключения подвеса на квадрокоптер Cherson CX 20
Полезные ссылки:
Обсуждения данного подвеса — форум
Программу для настройки подвеса можно найти тут
Подключения подвеса к компьютеру
На этом все, всем спасибо за внимание.
Вот такая скромная коробочка была запакована в почтовый пакет.
Комплектация:
— подвес;
— крепежная площадка с демпферами;
— крепеж камеры на подвес;
— болтики для крепежа подвеса на раму модели;
— провод из штекером JST;
— шлейф из пяти проводов для управления с аппаратуры подвесом.
Характеристики:
— процессор: STM32F103;
— гироскоп и акселерометр MPU6050;
— драйвера моторов DRV8313
— моторы бесколлекторные;
— размер крепежной площадки — 60х60мм
— полная высота подвеса — 120мм
— вес — 197грамм.
— питание подвеса — 10-18V,
— подвес работает на три управляемые оси;
— моторы БК
— материал рамы подвеса — металл;
— возможность настройки работы подвеса через ПК
Провод из штекером JST можно припаять к распределительной плате питания RC модели, таким образом мы можем за питать подвес.
Шлейфом из пяти проводов можно соединить подвес из приемником радиоаппаратуры и таким образом получить управления наклонами камеры.
Металлическая площадка из силиконовыми демпферами крепится на раму например квадрокоптера, а затем к ее демпферам крепится весь подвес.
В комплекте получаем ремешок для крепежа камеры на площадку подвеса.
На ремешке карбоновая пластинка с диаметром отверстия 22мм.
Рассмотрим основные детали на которых собран данный подвес.
Подвес работает на 32-х битном микроконтроллере STM32F103 который часто можно увидеть у программируемых устройствах.
Моторами подвеса управляют три драйвера в микросхемах DRV8313
На плате имеется гнездо mini USB которое предназначено для соединения платы подвеса с ПК.
То есть, скачав нужную программу можно настроить подвес на свои параметры, но замечу что данный подвес «Storm 32» не плохо работает из коробки.
За стабилизацию оси «X» и «Z» отвечает акселерометр и гироскоп на микросхеме MPU6050
За повороты подвеса по оси отвечает бесколлекторный мотор С2805 145Kw.
Наклоны камеры исполняют два бесколлекторных мотора 2206.
Конечно все сделано отлично, провода заложены в каналы и проходят сквозь моторы, это конечно хорошо, но провода слишком натянуты и боюсь если подвес резко дерниться то может отсоединится провод идущий к плате MPU6050.
Вес подвеса — 197грамм. что является не плохим результатом для 3-х осевого подвеса на металлической раме.
Красивая ровная картинка с камерой FireFly S6 будет весить в 277грамм.
Пора проверить подвес)))
Вот еще косяк, крепежный ремешок для камеры слишком длинный при этом я его сильно не затягивал.
Во время подключения подвеса его лучше не тормошить так как идет инициализация (10-15ск.) после этого подвес сигнализирует кратким сигналом о готовности к работе.
Подключаем управления подвесом через радиоаппаратуру:
— коричневый провод — общий минус;
— желтый провод — наклон камеры вверх-низ;
— оранжевый провод — наклон камеры на право-налево;
— красный провод — вращение камеры по оси (YAW).
То есть, коричневым проводом соединили минус подвеса с минусом приемника.
Остальные сигнальные провода для подключения к свободным каналам приемника радиоаппаратуры, но не обязательно их все подключать, например мне нужен только наклон камеры вниз-вверх знач подключаем только желтый провод, при этом минус всегда соединен.
Пример соединения на приемнику радиоаппаратуры «RadioLink AT9»
Пора уже его на квадрокоптер цеплять)))
Рекомендую к просмотру видео где я постараюсь подробно рассказать о подключении подвеса к радиоаппаратуре.
Установка и подключения подвеса на квадрокоптер Cherson CX 20
Полезные ссылки:
Обсуждения данного подвеса — форум
Программу для настройки подвеса можно найти тут
Подключения подвеса к компьютеру
На этом все, всем спасибо за внимание.
Самые обсуждаемые обзоры
| +74 |
3122
118
|
| +47 |
3057
49
|
| +132 |
4418
57
|
Работает хорошо, особенно если включить второй MPU.
Делаем ручку, к ней цепляем джойстик и кнопки.
В ручку прячется аккумулятор 2-4s или 18650 2-3штуки.
Ручку прикручиваем к подвесу.
Всё это дело настраивается в программе от создателя подвеса и собственно всё)))
Сейчас у меня джойстик от xbox, но он громоздкий очень, посему жду другой)))
Жду вот уже почти 70 дней когда ко мне приедет мини версия шторма, чтобы таки дорисовать корпус(
Кнопка от psp в пути, но уже в мск.
Ручка, она же отсек под два 18650 защищенных.
Выглядит так, но его нужно калибровать обязательно
Откройте лог и посмотрите thrust out.
Хотя некоторые и на 75% летают и говорят, что ничего страшного :)
На при этом запас мощности есть, при газе квад набирает быстро высоту
hobbyking.com/en_us/photography-action-cams-1/gimbals/aircraft-multi-rotor.html
Ну и сам коптер тоже должен быть совершенно другим — таскать 600-700 грамм полезной нагрузки — это очень много.
Видео для самого подвеса не нужно — нужно, чтобы с земли контролировать — что снимаете.
«образом мы можем за питать подвес.
не плохо работает из коробки.
и боюсь если подвес резко дерниться то может отсоединится
Пример соединения на приемнику радиоаппаратуры»