Робот-луноход Moon Walker. DIY KIT

- Цена: 11$
- Перейти в магазин
И снова всем привет!
Сегодня будем собирать и паять робота Moon Walker.
Сразу скажу, что впечатление от игрушки неоднозначное. Все подробности ниже.
Желаю приятного чтения)
Как всегда начну с упаковки.
Обычный почтовый пакет, внутри много поролона, который так и не смог защитить упаковку робота от повреждений.




Я даже не уверен, что это дело рук Почты России, что-то подсказывает, что упаковка изначально такая и была.
Но, как бы там не было, сам робот оказался целым, чему я был чрезвычайно рад)

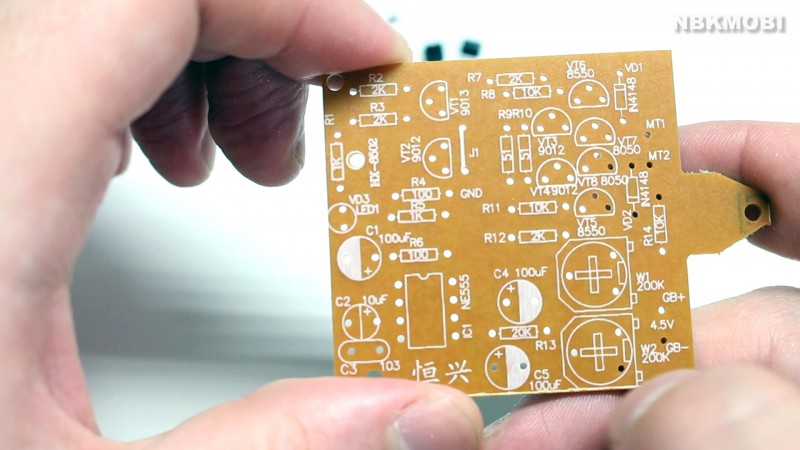
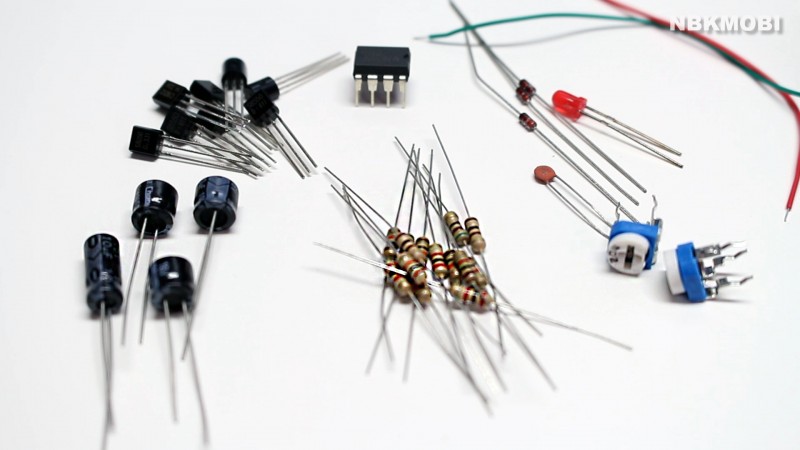
Помимо самого робота в коробке лежал пакетик с платой, радиоэлементами и инструкцией по сборке на китайском языке.
Перед тем, как описать процесс сборки, я хочу сказать, что изначально собрал неправильную схему, в связи с чем, робот работал неправильно.
Чтобы вы понимали всю суть этого набора, нужно описать вкратце принцип его работы.
Сам по себе робот функционирует уже из коробки, достаточно поставить три пальчиковых батарейки. Он может ходить вперед, что-то болтает и у него светятся глаза. Плата, которую необходимо спаять и установить — расширяет его функционал до возможности делать несколько шагов назад.
И всёё!
После неправильной сборки схемы, робот все так же ходил, болтал и сверкал глазами. Я даже изначально не понял, что вообще должно было измениться. Но погуглив пару часов, я выяснил, что схему сборки необходимо изменить. И вот именно о правильном варианте я буду рассказывать)
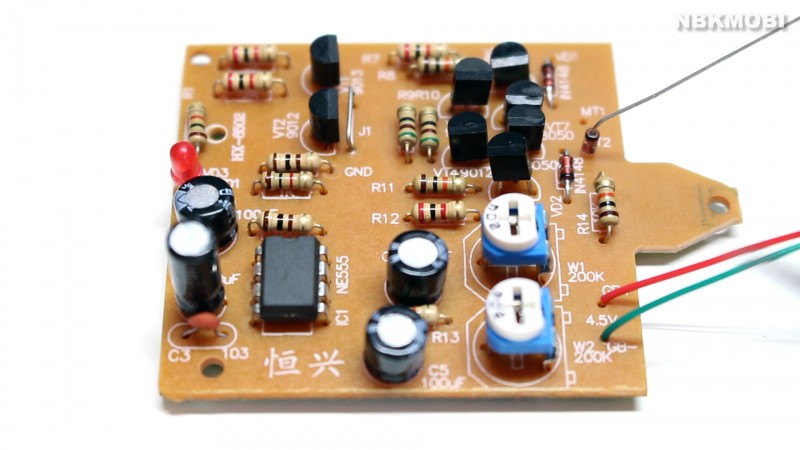
Паяем все элементы из набора на монтажную плату, должен остаться только один диод (на фото он припаян вертикально, но это не правильная схема, т.е. монтировать на плату его не нужно).
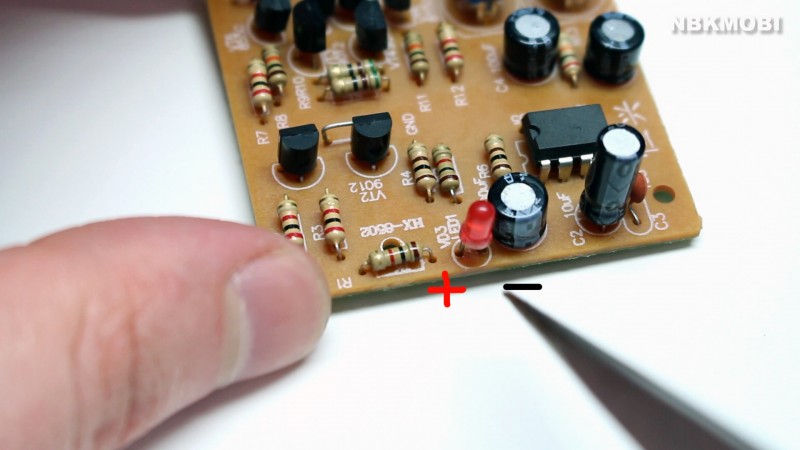
Естественно не забываем соблюдать полярность светодиода, диодов и электролитических конденсаторов.
На плате не обозначено, где плюс и минус у светодиода, поэтому выкладываю фото с обозначением.
Так же на плату необходимо было установить элемент с обозначением «J1». С трудом понял, что это обычная перемычка=)
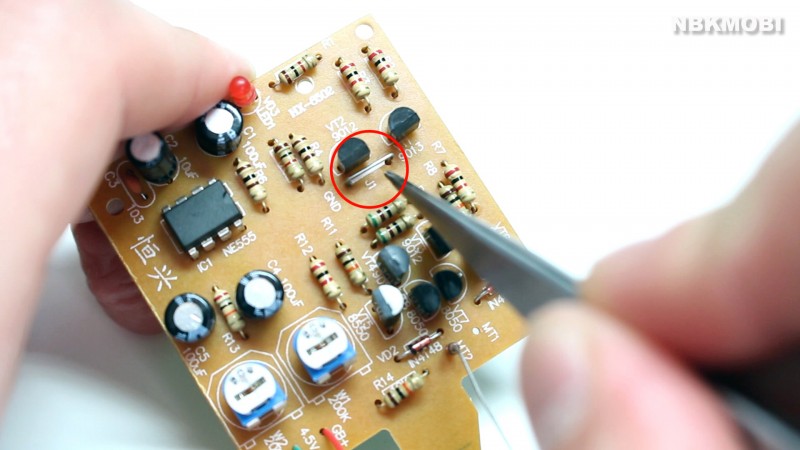
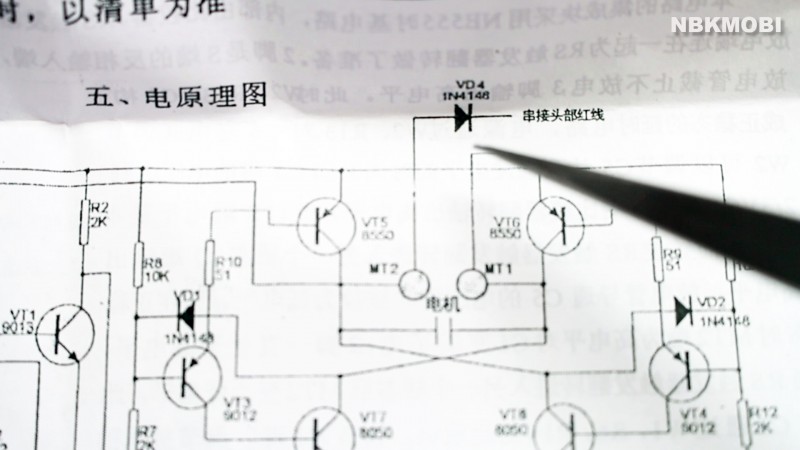
Ну и напоследок, вернемся к диоду, о котором я говорил ранее. Паять его на плату не нужно!!!
Хотя судя по схеме я реально думал, что все делаю верно=)
После того, как установили и припаяли все радиоэлементы на плату, переходим к разбору корпуса робота!
Для этого снимаем черную крышку отсека с батарейками и выкручиваем три винтика.
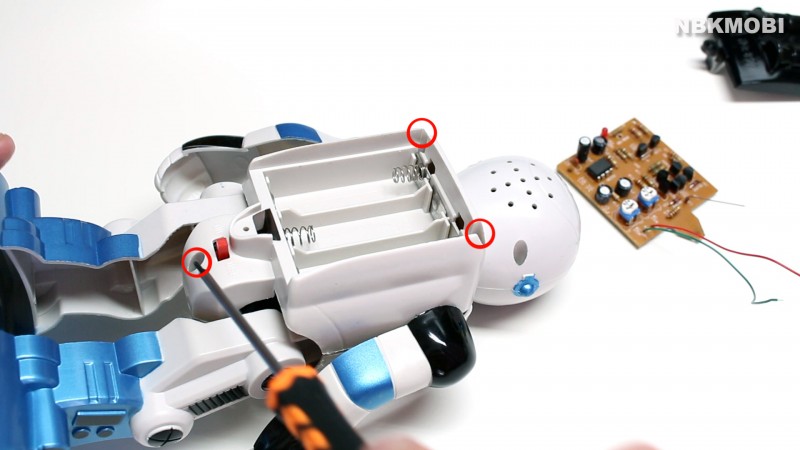
Внутри располагается электромоторчик и несколько проводков. Два провода от моторчика идут на питание и два уходят в голову робота.
Наша задача отпаять провода от минусовой клеммы разъема под батарейки и плюсовой провод от кнопки включения, вместо них мы припаиваем нашу плату. Т.е. плюс от платы паяем на кнопку, а минус на клемму от разъема батареек.
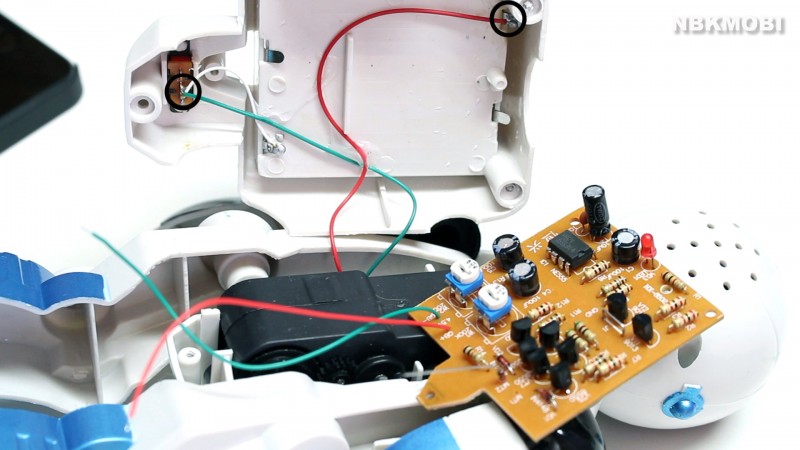
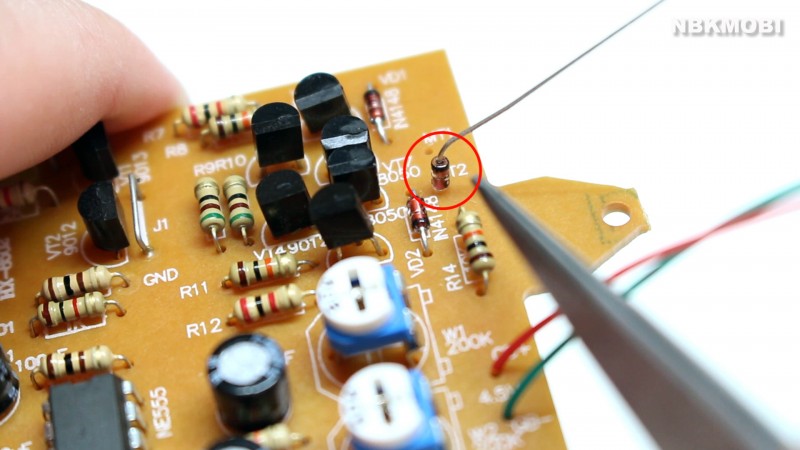
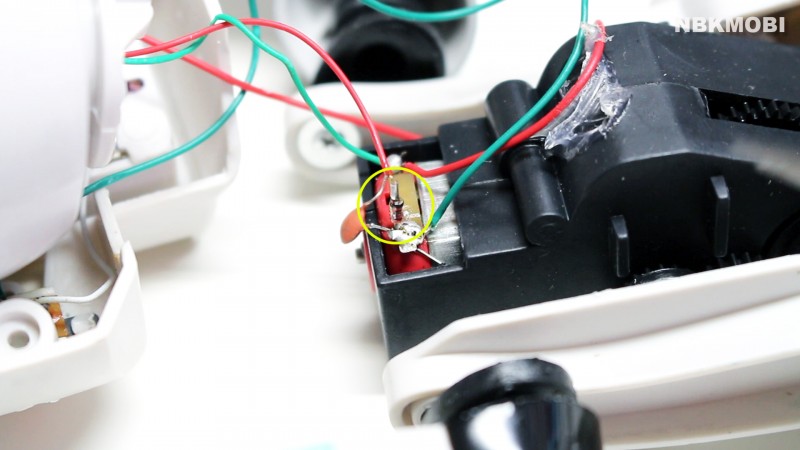
Теперь отпаиваем красный провод (со стороны моторчика), который выходит из головы робота и к нему минусом припаиваем оставшийся диод, а второй конец диода паяем обратно на моторчик.
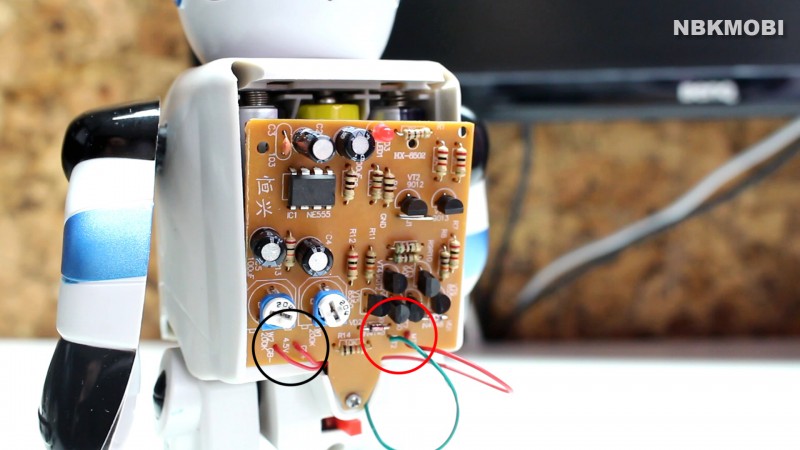
У нас осталось два проводка. Красный паяем в разъем «Mt1», а зеленый в «Mt2».
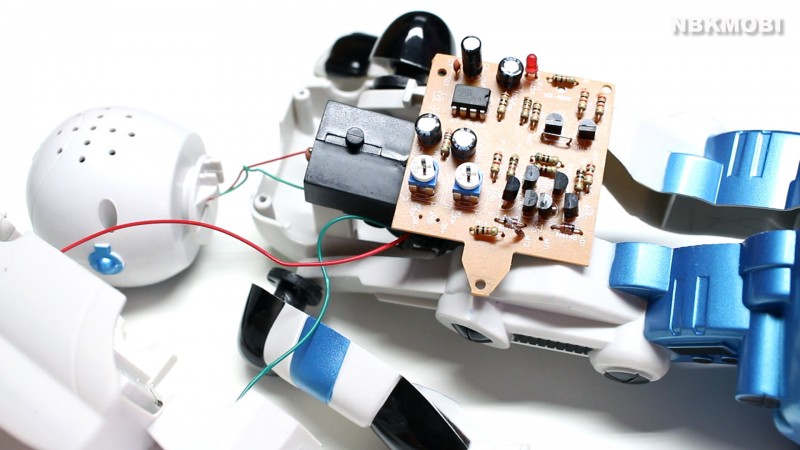
Поздравляю, сборка окончена.)
Как видно, плата устанавливается поверх батареек, вместо черной крышки. На мой взгляд выглядит не эстетично, да и не совсем практично.

После проверки, оказалось, что всё работает отлично, теперь робот научился ходить вперед и делать пару шагов назад. Но если честно, душевного удовлетворения от проделанной работы я не получил. Ожидал чего-то большего…
Больше подробностей по сборке смотрите в видеоверсии.
Оценить этот набор могу, как — СЛОЖНАА!
Удовольствие от сборки — РАЗОЧАРОВАНИЕ!
Нет, если конечно имеете огромное желание, что-то паять и собирать, то можно купить. Но мне кажется, что покупка этого набора не оправдает ваших надежд.

Желаю всем удачи.
И пока!=)

Сегодня будем собирать и паять робота Moon Walker.
Сразу скажу, что впечатление от игрушки неоднозначное. Все подробности ниже.
Желаю приятного чтения)
ПИАР
Этот набор я получил бесплатно от Китайского интернет-магазина BangGood, но несмотря на это, я с полной уверенностью заявляю, что никаких обязательств перед магазином я не несу, поэтому обзор будет честным и не предвзятым.
Погнали!=)
Погнали!=)
Как всегда начну с упаковки.
Обычный почтовый пакет, внутри много поролона, который так и не смог защитить упаковку робота от повреждений.
Я даже не уверен, что это дело рук Почты России, что-то подсказывает, что упаковка изначально такая и была.
Но, как бы там не было, сам робот оказался целым, чему я был чрезвычайно рад)
Помимо самого робота в коробке лежал пакетик с платой, радиоэлементами и инструкцией по сборке на китайском языке.
Перед тем, как описать процесс сборки, я хочу сказать, что изначально собрал неправильную схему, в связи с чем, робот работал неправильно.
Чтобы вы понимали всю суть этого набора, нужно описать вкратце принцип его работы.
Сам по себе робот функционирует уже из коробки, достаточно поставить три пальчиковых батарейки. Он может ходить вперед, что-то болтает и у него светятся глаза. Плата, которую необходимо спаять и установить — расширяет его функционал до возможности делать несколько шагов назад.
И всёё!
После неправильной сборки схемы, робот все так же ходил, болтал и сверкал глазами. Я даже изначально не понял, что вообще должно было измениться. Но погуглив пару часов, я выяснил, что схему сборки необходимо изменить. И вот именно о правильном варианте я буду рассказывать)
Паяем все элементы из набора на монтажную плату, должен остаться только один диод (на фото он припаян вертикально, но это не правильная схема, т.е. монтировать на плату его не нужно).
Естественно не забываем соблюдать полярность светодиода, диодов и электролитических конденсаторов.
На плате не обозначено, где плюс и минус у светодиода, поэтому выкладываю фото с обозначением.
Так же на плату необходимо было установить элемент с обозначением «J1». С трудом понял, что это обычная перемычка=)
Ну и напоследок, вернемся к диоду, о котором я говорил ранее. Паять его на плату не нужно!!!
Хотя судя по схеме я реально думал, что все делаю верно=)
После того, как установили и припаяли все радиоэлементы на плату, переходим к разбору корпуса робота!
Для этого снимаем черную крышку отсека с батарейками и выкручиваем три винтика.
Внутри располагается электромоторчик и несколько проводков. Два провода от моторчика идут на питание и два уходят в голову робота.
Наша задача отпаять провода от минусовой клеммы разъема под батарейки и плюсовой провод от кнопки включения, вместо них мы припаиваем нашу плату. Т.е. плюс от платы паяем на кнопку, а минус на клемму от разъема батареек.
Теперь отпаиваем красный провод (со стороны моторчика), который выходит из головы робота и к нему минусом припаиваем оставшийся диод, а второй конец диода паяем обратно на моторчик.
У нас осталось два проводка. Красный паяем в разъем «Mt1», а зеленый в «Mt2».
Поздравляю, сборка окончена.)
Как видно, плата устанавливается поверх батареек, вместо черной крышки. На мой взгляд выглядит не эстетично, да и не совсем практично.
После проверки, оказалось, что всё работает отлично, теперь робот научился ходить вперед и делать пару шагов назад. Но если честно, душевного удовлетворения от проделанной работы я не получил. Ожидал чего-то большего…
Больше подробностей по сборке смотрите в видеоверсии.
Оценить этот набор могу, как — СЛОЖНАА!
Удовольствие от сборки — РАЗОЧАРОВАНИЕ!
Нет, если конечно имеете огромное желание, что-то паять и собирать, то можно купить. Но мне кажется, что покупка этого набора не оправдает ваших надежд.
Желаю всем удачи.
И пока!=)
Самые обсуждаемые обзоры
| +87 |
5122
174
|
| +88 |
3581
85
|
| +58 |
1950
31
|
Я когда проверял, у меня жена кричала, что б я его выключил)))
Уже исправил.
Только недавно стал писать сюда обзоры и еще не привык ко всем этим нюансам.
Картинка
ЗЫ картинки тоже не вставляются почему-то…
Приятно почитать и посмотреть.
Он сказал «Поехалэ!» и вильнул хвостом: