Набор для самостоятельной сборки РОБОТА-ПАУКА.Гексапод
- Цена: 582 руб.
- Перейти в магазин
Друзья, огромный привет!
Сегодня речь пойдет о замечательном радиоконструкторе, после сборки которого должен получится радиоуправляемый "РОБОТ-ПАУК" или ГЕКСАПОД.
Итак. По традиции начну обзор с упаковки.
Упаковано в обычный почтовый пакет, зато внутри была целая куча поролона, поэтому за целостность и сохранность конструктора можно не переживать.


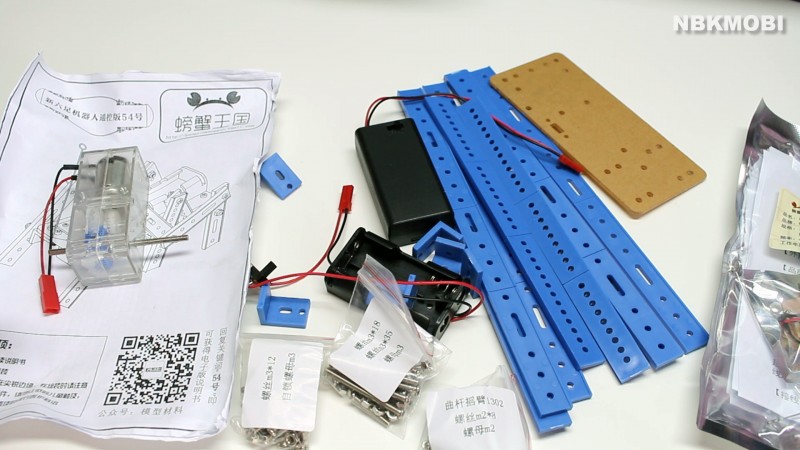
Сам конструктор упакован в несколько антистатических пакетов.

Внутри различные части корпуса, электромоторчик, платы управления, отсек для батареек и некое подобие пульта управления, который так же необходимо собрать.

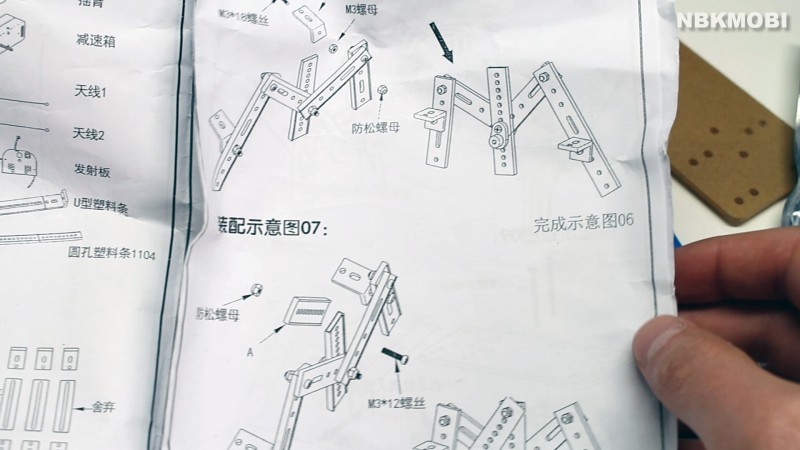
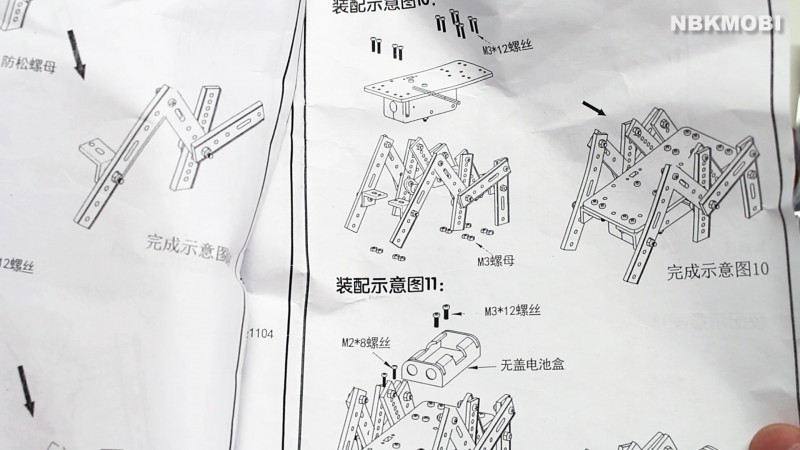
Есть и достаточно подробная инструкция по сборке, даже несмотря на то, что она на китайском языке — всё очень понятно.
Подробно расписывать весь процесс сборки я не буду, отмечу лишь самое главное.
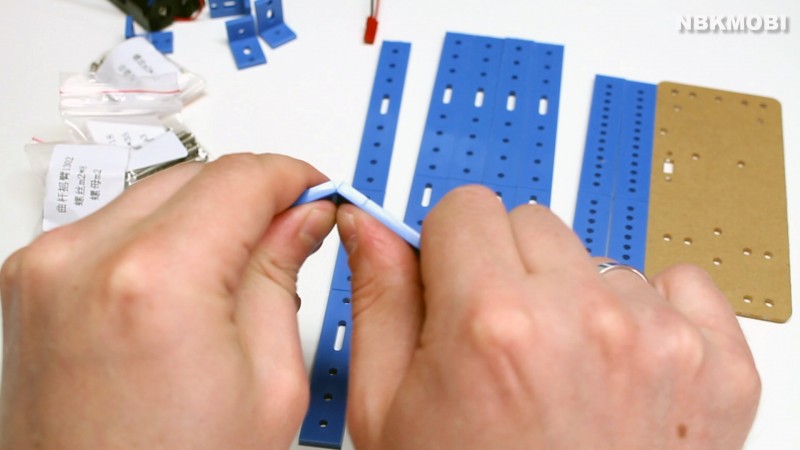
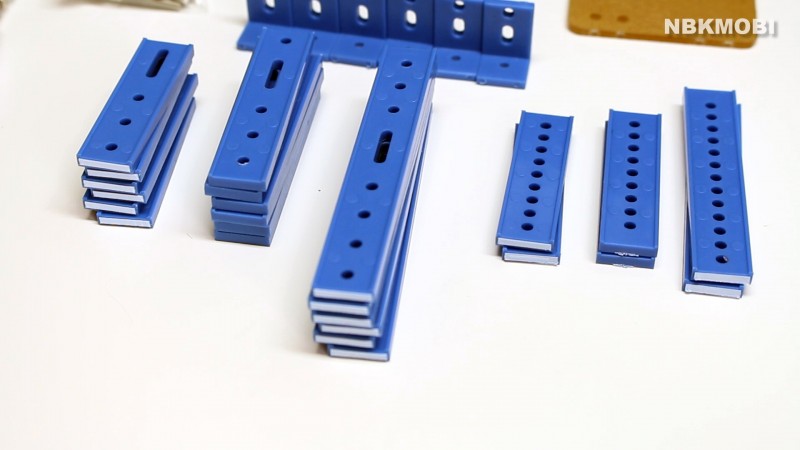
Начинается сборка с подготовки частей для сборки «ног». В наборе есть пластиковые элементы синего цвета, которые необходимо разделить на отдельные части. Для удобства я их все разложил по размерам.
Далее я взял все необходимые элементы для сборки «ног» одной стороны.

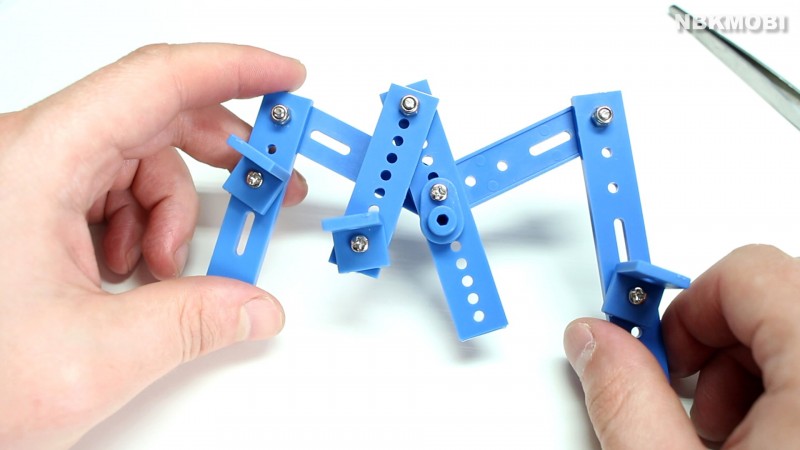
Следуя инструкции я собрал «ноги» одной стороны. Торопиться не стоит, просто внимательно следуйте инструкции. И не затягивайте сильно контргайки, все части должны свободно двигаться. Забегая вперед, скажу, что не обошлось без небольшой переделки. Но об этом чуть позже.

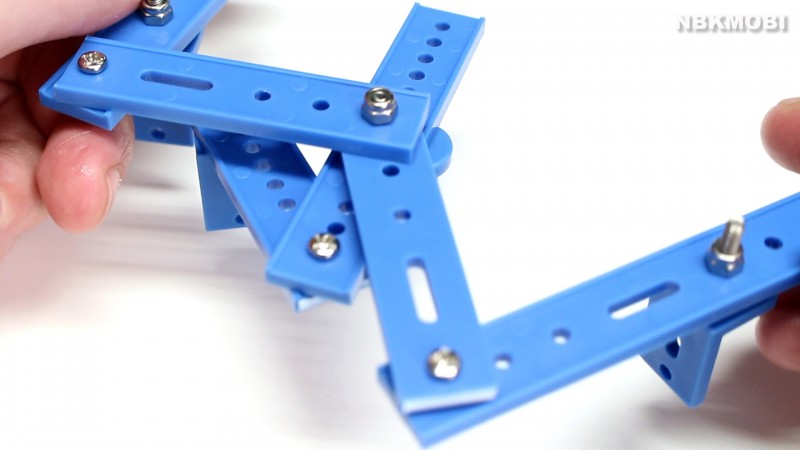
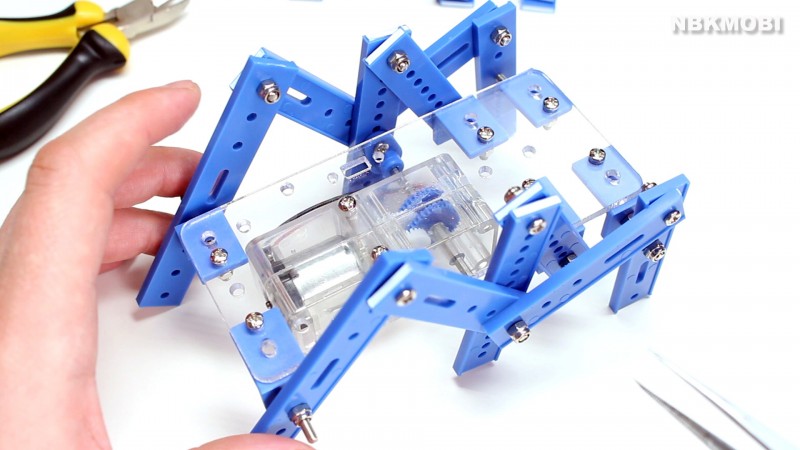
По аналогии я собрал «ноги» второй стороны. Получилось также, просто, как в зеркальном отражении.

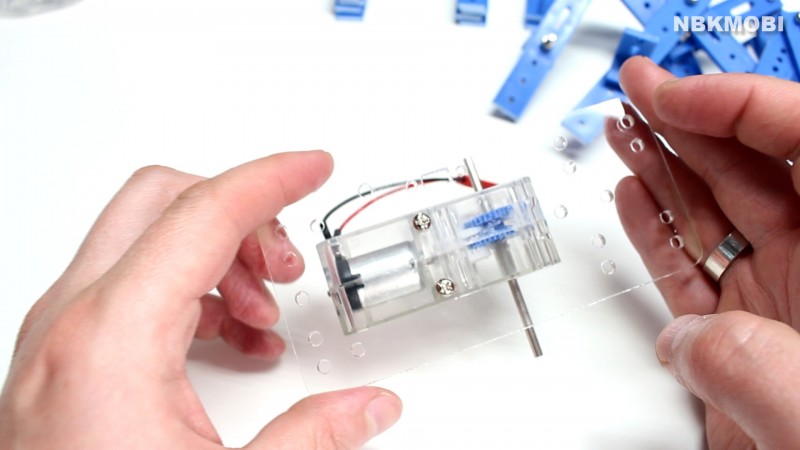
Далее необходимо собрать туловище робота. В комплекте была форма из оргстекла, к которой нужно прикрепить электромоторчик с помощью двух винтиков.


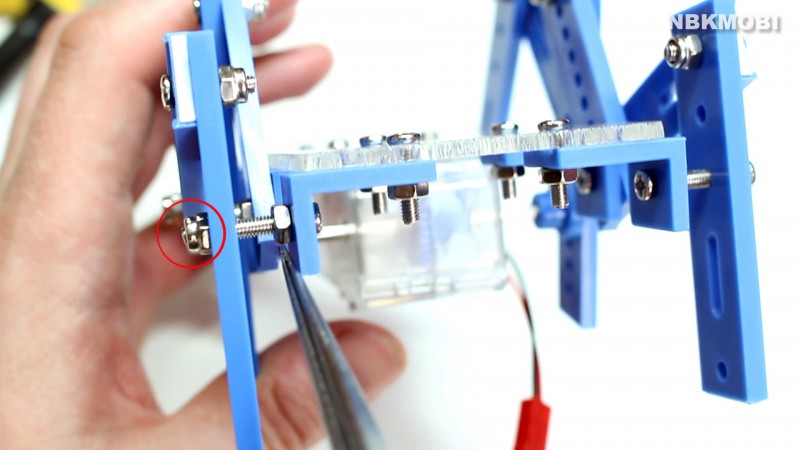
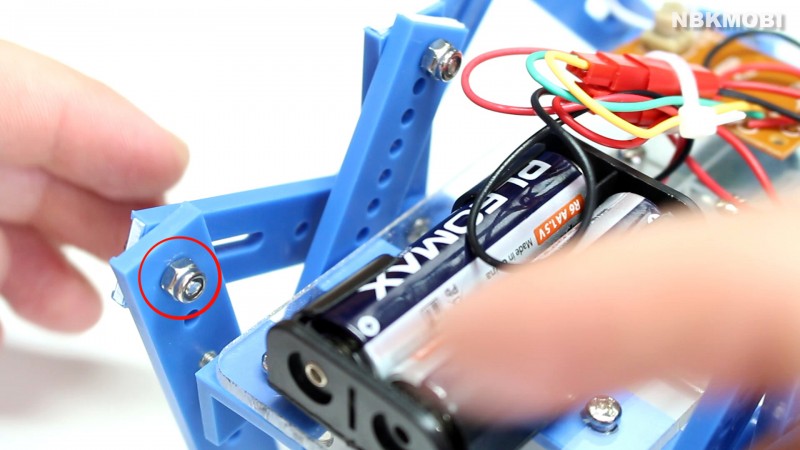
Теперь можно приступать к креплению ног к корпусу. Тут есть свои нюансы. С той стороны, где расположены короткие части ног, я предполагаю, что это задняя часть робота, необходимо ослабить контргайки, другими словами, нужно накрутить гайку таким образом, что бы кончик винтика не вылез за пределы гайки (см. фото).
После этого ноги легко прикручиваются к корпусу.
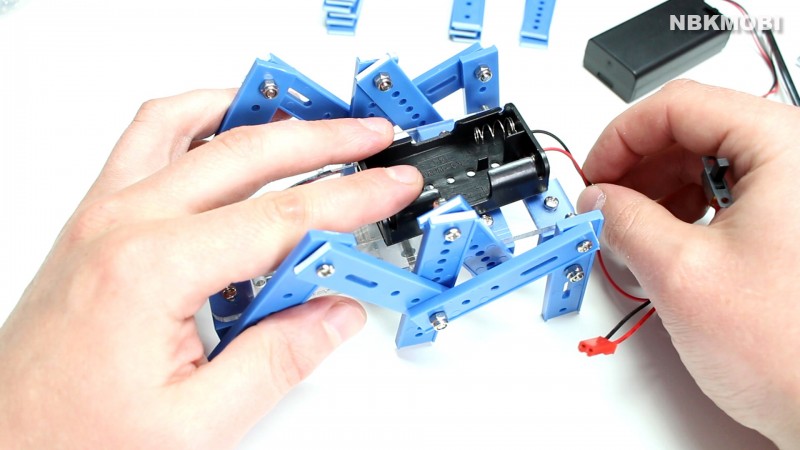
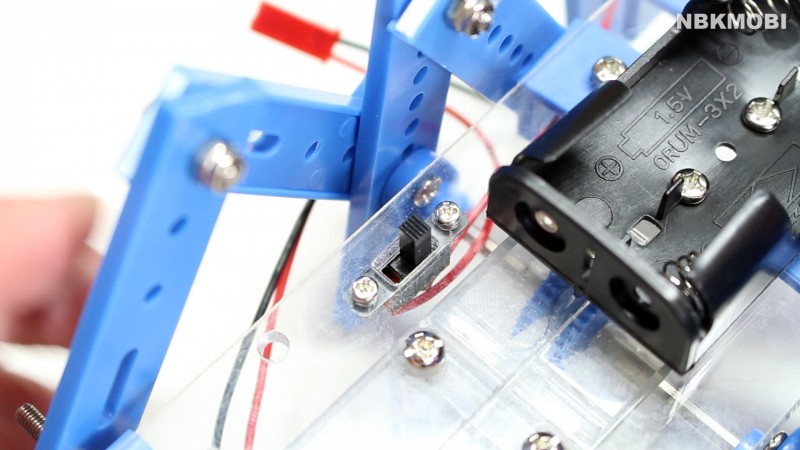
Когда корпус и ноги собраны, переходим к монтажу батарейного отсека и кнопки включения. Я поторопился и допустил ошибку, которую в дальнейшем исправил. Лучше располагать батарейный отсек таким образом, чтобы провода смотрели вперед и кнопку вкл/выкл располагать снизу корпуса, тогда все провода окажутся сверху и не будут путаться в ногах (на фото показано, как не надо размещать).
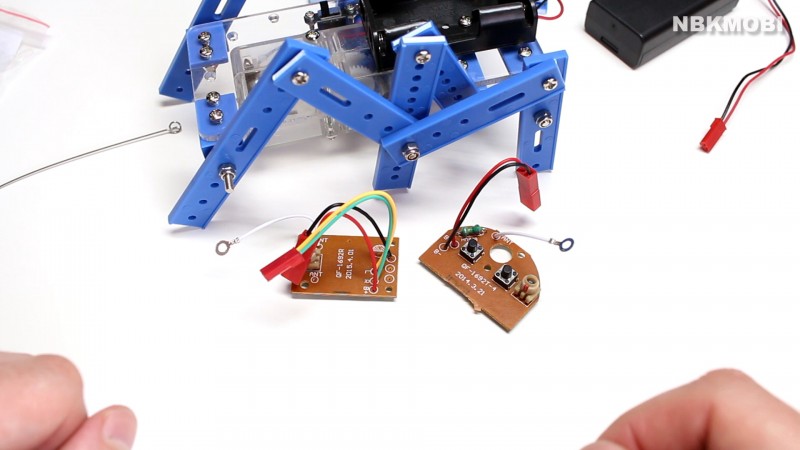
Теперь можно перейти к креплению плат управления на корпус робота и сборке пульта. Тут тоже возникли проблемы. Платы, которые были в комплекте отличаются от плат, которые указаны в инструкции, соответственно и разъемы крепления у них отличались. Пришлось «колхозить» и применять грубую физическую силу=)
Начал я со сборки пульта управления. Выкручиваем саморез из корпуса пульта и снимаем крышку. Устанавливаем две пальчиковые батарейки и закрываем крышку обратно. Берем плату для пульта и прикручиваем ее к корпусу, но уже не саморезом, а винтиком из набора m2 x 8, потом я взял винт m3 x 12 и вкрутил его в отверстие на плате. На этот винт я одел антенну и зафиксировал с помощью гайки.

Пульт готов!=)
Плата для приема сигнала, которая крепится на корпус робота собирается по аналогии. Естественно, что разъемы креплений тут тоже не совпадают, поэтому проявляем фантазию. И, как я и говорил ранее, у меня не правильно стоял батарейный отсек и кнопка включения, поэтому я их развернул.
Теперь можно выполнять первый запуск.=) Естественно, что ходить робот отказался. У меня были сильно затянуты контргайки, об этом я писал в самом начале. После того, как я их ослабил свершилось чудо — паучок задергал лапками=) Но полноценно ходить он все равно отказывался.
Выяснилось, что этому мешают винтики с одной и с другой стороны. При этом отмечу, что собрано все по инструкции.

Было принято ответственное решение по изменению конструкции ног ( на фото элементы «1» и «2»). Я поменял эти части корпуса местами в их обшей точке крепления к средней балке, за счет чего появилось место для свободного хода той части ноги, где располагаются винтики.
Теперь робот шагал увереннее, но все также неполноценно. Полного хода не получалось. Он мог сделать шаг вперед и шаг назад, после этого моторчик останавливался.
Я почитал комментарии людей, которые собирали этого гексапода и выяснилось, что это не я где-то накосячил, а это в принципе недоработки инструкции. Т.е. необходимо самому собрать ноги таким образом, что бы моторчик мог их проворачивать.
Но это уже совсем другая история…
Подробная сборка и пример работы робота смотрите на видео.
А я побежал осуществлять мозговой штурм, хочу все-таки довести этого робота до ума.
Спустя два дня
Прочитал все ваши комментарии. Попробовал все, что только можно, а проблема оказалась до неприличия простой и банальной.
Необходимо было ослабить всего лишь две гайки на задних лапах.

Теперь робот отлично ходит!=)
В итоге, инструкция правильная, за исключением крепления двух элементов, о которых я говорил. Самое главное не затягивать контргайки, как только винт вкрутился в пластиковое кольцо внутри гайки — крутить дальше не нужно.
Проблема решена.
Всем пока и желаю удачи!)
Сегодня речь пойдет о замечательном радиоконструкторе, после сборки которого должен получится радиоуправляемый "РОБОТ-ПАУК" или ГЕКСАПОД.
ПИАР
Этот набор я получил бесплатно от Китайского интернет-магазина BangGood, но несмотря на это, я с полной уверенностью заявляю, что никаких обязательств перед магазином я не несу, поэтому обзор будет честным и не предвзятым.
Погнали!=)
Погнали!=)
Итак. По традиции начну обзор с упаковки.
Упаковано в обычный почтовый пакет, зато внутри была целая куча поролона, поэтому за целостность и сохранность конструктора можно не переживать.
Сам конструктор упакован в несколько антистатических пакетов.
Внутри различные части корпуса, электромоторчик, платы управления, отсек для батареек и некое подобие пульта управления, который так же необходимо собрать.
Есть и достаточно подробная инструкция по сборке, даже несмотря на то, что она на китайском языке — всё очень понятно.
Подробно расписывать весь процесс сборки я не буду, отмечу лишь самое главное.
Начинается сборка с подготовки частей для сборки «ног». В наборе есть пластиковые элементы синего цвета, которые необходимо разделить на отдельные части. Для удобства я их все разложил по размерам.
Далее я взял все необходимые элементы для сборки «ног» одной стороны.
Следуя инструкции я собрал «ноги» одной стороны. Торопиться не стоит, просто внимательно следуйте инструкции. И не затягивайте сильно контргайки, все части должны свободно двигаться. Забегая вперед, скажу, что не обошлось без небольшой переделки. Но об этом чуть позже.
По аналогии я собрал «ноги» второй стороны. Получилось также, просто, как в зеркальном отражении.
Далее необходимо собрать туловище робота. В комплекте была форма из оргстекла, к которой нужно прикрепить электромоторчик с помощью двух винтиков.
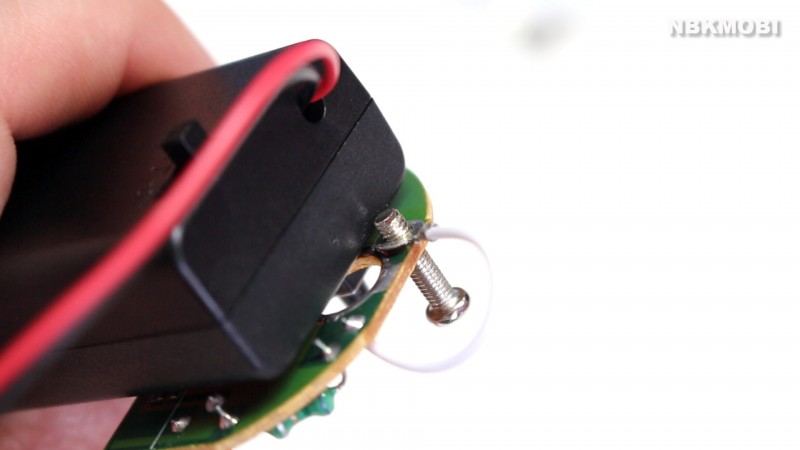
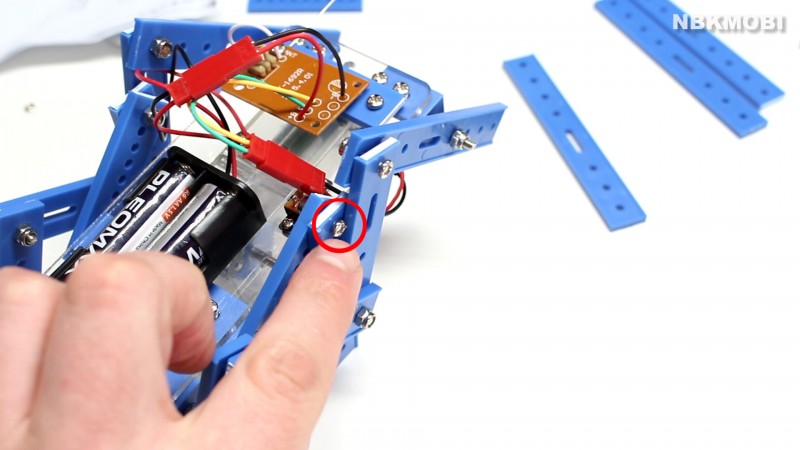
Теперь можно приступать к креплению ног к корпусу. Тут есть свои нюансы. С той стороны, где расположены короткие части ног, я предполагаю, что это задняя часть робота, необходимо ослабить контргайки, другими словами, нужно накрутить гайку таким образом, что бы кончик винтика не вылез за пределы гайки (см. фото).
После этого ноги легко прикручиваются к корпусу.
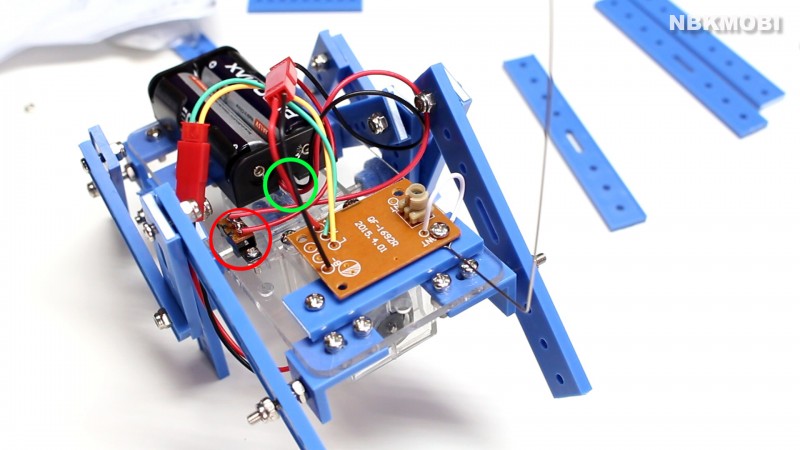
Когда корпус и ноги собраны, переходим к монтажу батарейного отсека и кнопки включения. Я поторопился и допустил ошибку, которую в дальнейшем исправил. Лучше располагать батарейный отсек таким образом, чтобы провода смотрели вперед и кнопку вкл/выкл располагать снизу корпуса, тогда все провода окажутся сверху и не будут путаться в ногах (на фото показано, как не надо размещать).
Теперь можно перейти к креплению плат управления на корпус робота и сборке пульта. Тут тоже возникли проблемы. Платы, которые были в комплекте отличаются от плат, которые указаны в инструкции, соответственно и разъемы крепления у них отличались. Пришлось «колхозить» и применять грубую физическую силу=)
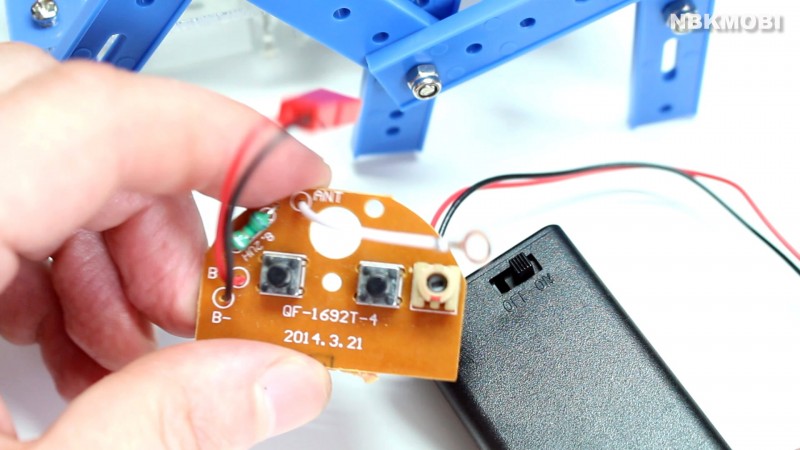
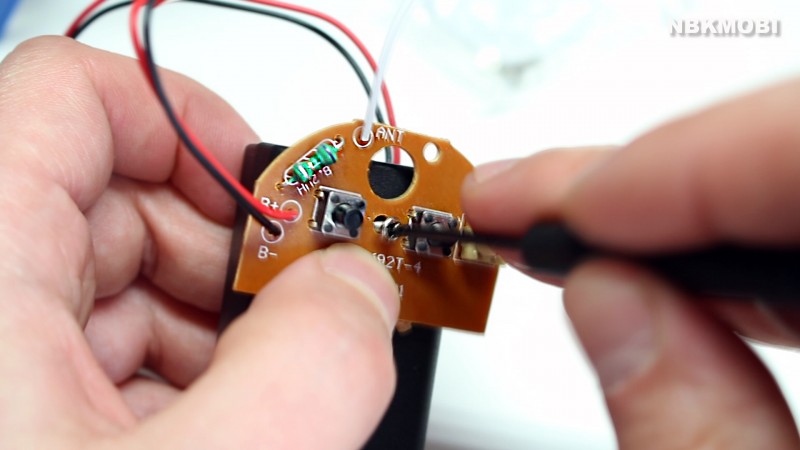
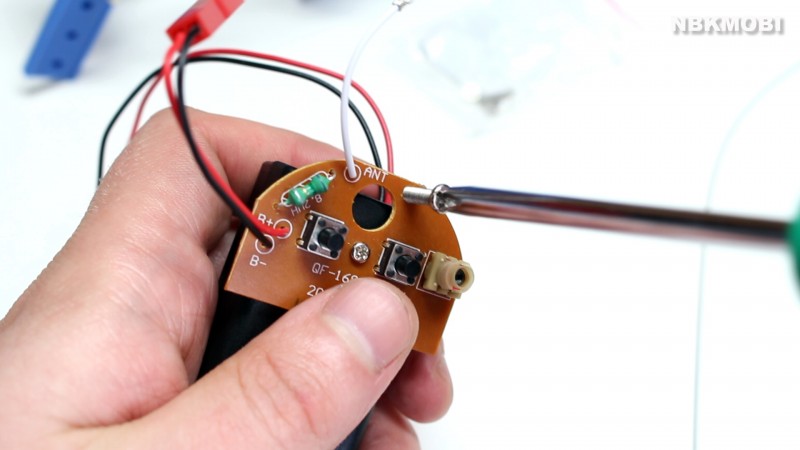
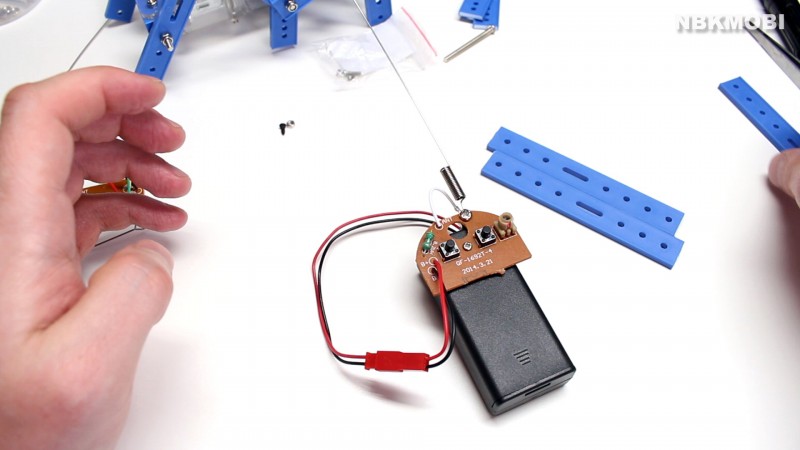
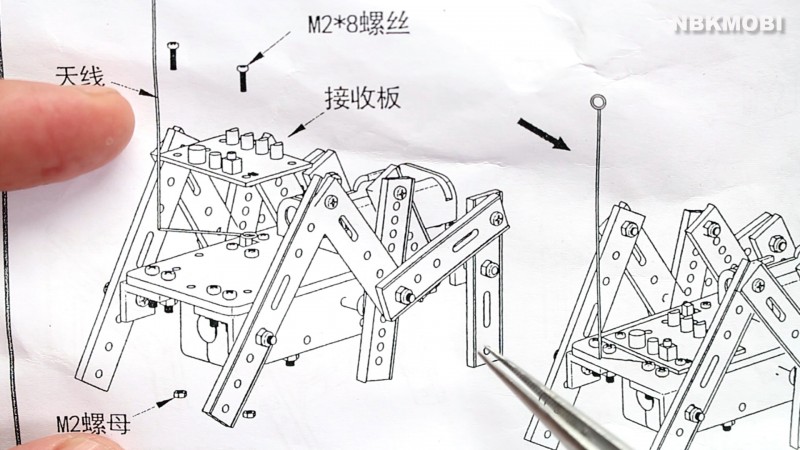
Начал я со сборки пульта управления. Выкручиваем саморез из корпуса пульта и снимаем крышку. Устанавливаем две пальчиковые батарейки и закрываем крышку обратно. Берем плату для пульта и прикручиваем ее к корпусу, но уже не саморезом, а винтиком из набора m2 x 8, потом я взял винт m3 x 12 и вкрутил его в отверстие на плате. На этот винт я одел антенну и зафиксировал с помощью гайки.
Пульт готов!=)
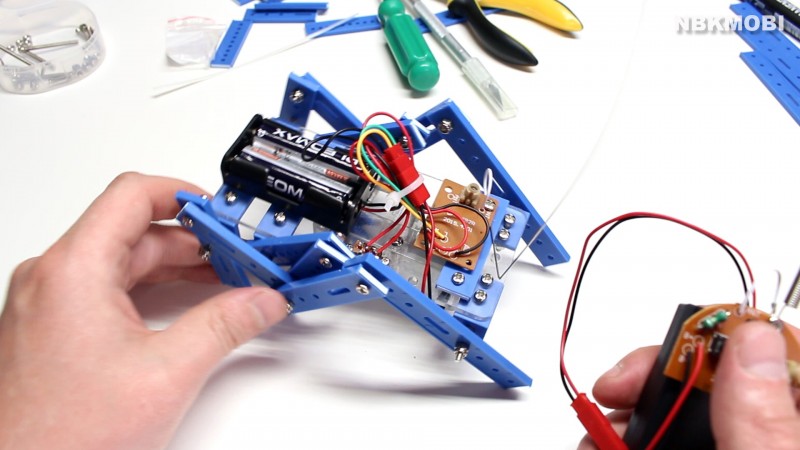
Плата для приема сигнала, которая крепится на корпус робота собирается по аналогии. Естественно, что разъемы креплений тут тоже не совпадают, поэтому проявляем фантазию. И, как я и говорил ранее, у меня не правильно стоял батарейный отсек и кнопка включения, поэтому я их развернул.
Теперь можно выполнять первый запуск.=) Естественно, что ходить робот отказался. У меня были сильно затянуты контргайки, об этом я писал в самом начале. После того, как я их ослабил свершилось чудо — паучок задергал лапками=) Но полноценно ходить он все равно отказывался.
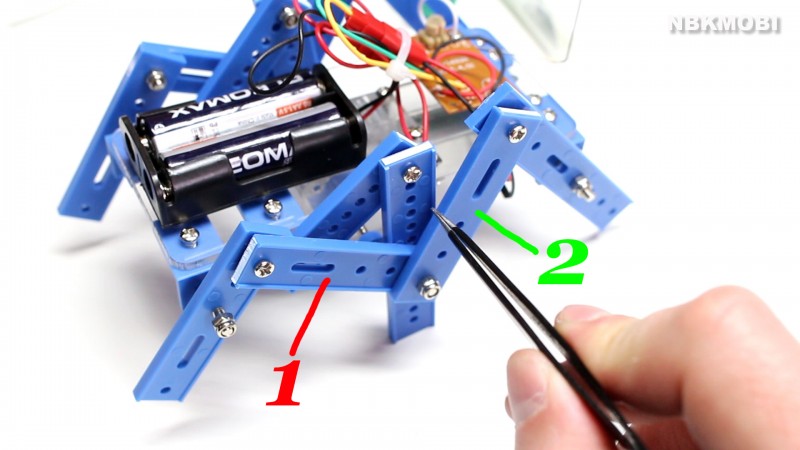
Выяснилось, что этому мешают винтики с одной и с другой стороны. При этом отмечу, что собрано все по инструкции.
Было принято ответственное решение по изменению конструкции ног ( на фото элементы «1» и «2»). Я поменял эти части корпуса местами в их обшей точке крепления к средней балке, за счет чего появилось место для свободного хода той части ноги, где располагаются винтики.
Теперь робот шагал увереннее, но все также неполноценно. Полного хода не получалось. Он мог сделать шаг вперед и шаг назад, после этого моторчик останавливался.
Я почитал комментарии людей, которые собирали этого гексапода и выяснилось, что это не я где-то накосячил, а это в принципе недоработки инструкции. Т.е. необходимо самому собрать ноги таким образом, что бы моторчик мог их проворачивать.
Но это уже совсем другая история…
Подробная сборка и пример работы робота смотрите на видео.
А я побежал осуществлять мозговой штурм, хочу все-таки довести этого робота до ума.
Спустя два дня
Прочитал все ваши комментарии. Попробовал все, что только можно, а проблема оказалась до неприличия простой и банальной.
Необходимо было ослабить всего лишь две гайки на задних лапах.
Теперь робот отлично ходит!=)
В итоге, инструкция правильная, за исключением крепления двух элементов, о которых я говорил. Самое главное не затягивать контргайки, как только винт вкрутился в пластиковое кольцо внутри гайки — крутить дальше не нужно.
Проблема решена.
Всем пока и желаю удачи!)
Самые обсуждаемые обзоры
| +253 |
4403
150
|
| +27 |
1352
44
|
Я сначала снимаю видео, а потом уже пишу обзор на MySku.
Что за тема играет на фоне видео?
По-поводу сборки вы правы. Жаль, что инструкция не доведена до ума. Получается, что показана только суть, как в принципе собирать, а дальше уже надо включать фантазию.
«для сборки РОБОТ».
Похоже на изделие китайских уроков труда.
www.youtube.com/results?search_query=hexapod
Мой робот паук )))