GY-85 или как я инерционный трекер для City Car Driving собирал

- Цена: $8.15
- Перейти в магазин
Валялся у меня руль Logitech G27 Racing Wheel, купленный давно с рук занедорого.
Хорошая штука в гонки поездить, но в City Car Driving (бывший 3D Инструктор) очень неудобно по сторонам смотреть.
Сначала я пытался при помощи камеры отслеживать движения головы, но это дело очень ненадежное. Постоянно координаты терялись.
И почитав это, это и это я принялся за сборку своего трекера.
Купил GY-85, купил самую дешевую Ардуино Nano на CH340. Почему именно Nano? Да потому что она компактная по размеру и имеет на борту выход на 3.3В и 5В(да еще и micro-usb порт в придачу), в отличие от pro mini у которого только есть 5В выход.
Спаиваются Arduino Nano и GY-85 следующими контактами:
GY-85 -> Arduino Nano
VCC_IN -> 3v3
GND -> GND
SCL -> A5
SDA -> A4
Спаял, присоединил mini-usb кабель к Nano.
Далее нужно скачать среду разработки для Arduino версии 1.0.6 — arduino.cc/download.php?f=/arduino-1.0.6-windows.exe. Качать надо именно 1.0.6, потому что 1.6.5 не компилирует скетч и вываливается с ошибкой.
Ссылка на скетч (исходный код для GY-85) — sourceforge.net/projects/gy80facetrack/files/DIY_headtracker_FTR_GY85.zip/download
Устанавливаем Arduino IDE версии 1.0.6, распаковываем куда-нибудь исходник для датчика.
Вместе со средой разработки у Вас установятся драйвера и система будет видеть новый COM-порт. Но это только если Вы купили оригинальную ардуино.
Если же Вы, как и я, купили китайский клон с чипом CH340, то ставьте драйвер — smart-chip.ru/wp-content/uploads/2014/10/DRIVER-CH340G.rar
Но если у Вас Windows 7 x64, то Вас ждет сюрприз с неподписанным драйвером, поэтому качаем драйвер отсюда и устанавливаем — www.winchiphead.com/download/CH341/CH341SER.ZIP (мне сразу помогло).
Запускаем Arduino IDE 1.0.6, в ней выбираем Файл — Открыть. Открываем папку, в которую мы распаковали исходники и выбираем файл DIY_headtracker.ino
Потом нам нужно выбрать тип платы: Сервис — Плата — Arduino Nano w/ATmega 328, а затем и COM-порт, к которому подключена плата: Сервис — Последовательный порт — COM(обычно самый нижний).
Затем нажать круглую кнопку со стрелкой, дождаться, пока исходный код скомпилируется и загрузится в плату.
Всё. Можно закрывать Arduino IDE.
Подготовка FaceTrackNOIR.
Качаем FaceTrackNOIR — sourceforge.net/projects/facetracknoir/files/latest/download и устанавливаем. Затем качаем dll-ки для того, чтобы программа видела наш инерционник — sourceforge.net/projects/hatire/files/FTNoIR_Tracker_HAT_V210.zip/download и распаковываем в ту папку, куда установился FaceTrackNOIR.
Прикручиваем, подключенную к компьютеру, получившуюся конструкцию к наушникам проволокой(можно скотчем, можно веревочкой).
Ориентируем плату так, чтобы микросхемами она смотрела вверх, а стрелкой Y вперед.
Получилось следующее:

Открываем программу, в разделе Tracker Source 1 выбираем «Hatire Arduino», в настройках (кнопка Settings) выбираем COM-порт, на котором находится Arduino, в закладке Command Serial parameters проверяем чтобы было 115200/8/none/1/CTS-RTS, устанавливаем Delay init 1000, delay start 1000 и нажимаем Start.
Головой не дергаем. Через пару секунд начнут приходить данные (зелёные и серые цифры начнут меняться), а лицо с желтым прицелом придёт в движение.
Запускаем City Car Driving, видим, что трекер вращает камерой.
Теперь можно настроить чувствительность и максимальное вращение камерой. В FaceTrackNOIR заходим в закладку Curves и настраиваем оси.
Я сделал примерно так:
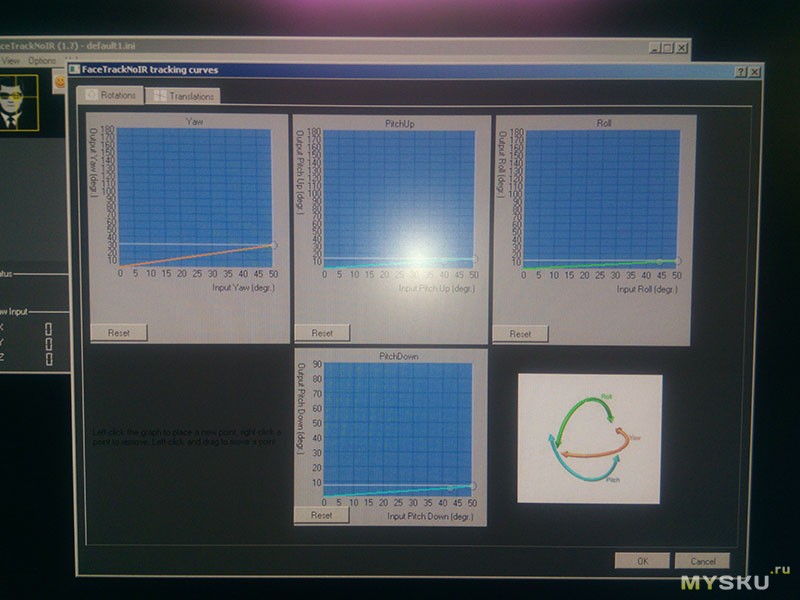
но если Вы хотите оборачиваться назад, то придется оставить оси как есть.
Вобщем получилось вот такая конструкция:
Хорошая штука в гонки поездить, но в City Car Driving (бывший 3D Инструктор) очень неудобно по сторонам смотреть.
Сначала я пытался при помощи камеры отслеживать движения головы, но это дело очень ненадежное. Постоянно координаты терялись.
И почитав это, это и это я принялся за сборку своего трекера.
Купил GY-85, купил самую дешевую Ардуино Nano на CH340. Почему именно Nano? Да потому что она компактная по размеру и имеет на борту выход на 3.3В и 5В(да еще и micro-usb порт в придачу), в отличие от pro mini у которого только есть 5В выход.
Спаиваются Arduino Nano и GY-85 следующими контактами:
GY-85 -> Arduino Nano
VCC_IN -> 3v3
GND -> GND
SCL -> A5
SDA -> A4
Спаял, присоединил mini-usb кабель к Nano.
Далее нужно скачать среду разработки для Arduino версии 1.0.6 — arduino.cc/download.php?f=/arduino-1.0.6-windows.exe. Качать надо именно 1.0.6, потому что 1.6.5 не компилирует скетч и вываливается с ошибкой.
Ссылка на скетч (исходный код для GY-85) — sourceforge.net/projects/gy80facetrack/files/DIY_headtracker_FTR_GY85.zip/download
Устанавливаем Arduino IDE версии 1.0.6, распаковываем куда-нибудь исходник для датчика.
Вместе со средой разработки у Вас установятся драйвера и система будет видеть новый COM-порт. Но это только если Вы купили оригинальную ардуино.
Если же Вы, как и я, купили китайский клон с чипом CH340, то ставьте драйвер — smart-chip.ru/wp-content/uploads/2014/10/DRIVER-CH340G.rar
Но если у Вас Windows 7 x64, то Вас ждет сюрприз с неподписанным драйвером, поэтому качаем драйвер отсюда и устанавливаем — www.winchiphead.com/download/CH341/CH341SER.ZIP (мне сразу помогло).
Запускаем Arduino IDE 1.0.6, в ней выбираем Файл — Открыть. Открываем папку, в которую мы распаковали исходники и выбираем файл DIY_headtracker.ino
Потом нам нужно выбрать тип платы: Сервис — Плата — Arduino Nano w/ATmega 328, а затем и COM-порт, к которому подключена плата: Сервис — Последовательный порт — COM(обычно самый нижний).
Затем нажать круглую кнопку со стрелкой, дождаться, пока исходный код скомпилируется и загрузится в плату.
Всё. Можно закрывать Arduino IDE.
Подготовка FaceTrackNOIR.
Качаем FaceTrackNOIR — sourceforge.net/projects/facetracknoir/files/latest/download и устанавливаем. Затем качаем dll-ки для того, чтобы программа видела наш инерционник — sourceforge.net/projects/hatire/files/FTNoIR_Tracker_HAT_V210.zip/download и распаковываем в ту папку, куда установился FaceTrackNOIR.
Прикручиваем, подключенную к компьютеру, получившуюся конструкцию к наушникам проволокой(можно скотчем, можно веревочкой).
Ориентируем плату так, чтобы микросхемами она смотрела вверх, а стрелкой Y вперед.
Получилось следующее:
Открываем программу, в разделе Tracker Source 1 выбираем «Hatire Arduino», в настройках (кнопка Settings) выбираем COM-порт, на котором находится Arduino, в закладке Command Serial parameters проверяем чтобы было 115200/8/none/1/CTS-RTS, устанавливаем Delay init 1000, delay start 1000 и нажимаем Start.
Головой не дергаем. Через пару секунд начнут приходить данные (зелёные и серые цифры начнут меняться), а лицо с желтым прицелом придёт в движение.
Запускаем City Car Driving, видим, что трекер вращает камерой.
Теперь можно настроить чувствительность и максимальное вращение камерой. В FaceTrackNOIR заходим в закладку Curves и настраиваем оси.
Я сделал примерно так:
но если Вы хотите оборачиваться назад, то придется оставить оси как есть.
Вобщем получилось вот такая конструкция:
Самые обсуждаемые обзоры
| +87 |
4918
164
|
| +87 |
3477
85
|
| +52 |
1699
28
|
в каких нибудь авиасимуляторах например? Невнимательно прочитал обзор. Не очень удобно поворачивать голову и продолжать смотреть на тот же экран, но видимо к этому привыкают быстро?А если серьёзно, то при нормальной настройке при переводе взгляда в левый-правый угол монитора будет удобно смотреть в зеркала. Что видимо и требовалось. Выглядывать из окна машины явно не требуется))
Одним глазом в монитор другим на клавиатуру)))
Выставочные фотографии и картины нужно рассматривать одним глазом с расстояния, равным диагонали.
Только тогда получается адекватное восприятие снимка и объемность изображения.
Все художники и фотографы это знают.
Ну и самое главное. Нужно уговорить разработчиков, чтобы они изменили свой симулятор под 3-мониторные решения. Особенно учитывая, что они поддержку Oculus Rift обещают уже почти год.
Но то военная техника, там денег не жалели, а тут домашняя.
Но кроме головокружений это ничего не вызывало. Вау-эффекта нет никакого.
Тормоза, мыло, в зеркалах нифига не видно.
Смартфон у меня 5.5 дюймов с FullHD. Софт: Tridef 3D и Monect PC Remote.
Я не говорил про софт, запускаемый на смартфоне и работающий на нем и использующий датчики самого смартфона для ориентации в пространстве.
Я говорил про софт, запускаемый на компьютере, управляемый при помощи этого трекера и использующий смартфон в качестве стереомонитора на который выводится изображение по wifi.
Так там получатся большие задержки, которые, естественно, дадут тот же эффект, как и хреновые датчики. Разработчики Oculus rift как раз над снижением задержек и работают все эти годы.
Может кто подскажет программку, которая может вывести FullHD изображение с компьютера на смартфон по кабелю?
Плюс можно еще в исходниках прописать кнопку для сброса в центр иногда это кнопка нужна. Т.к. например если ты подключил этот трекер и он лежал на столе. То центр у тебя и останется на столе. Можно настроить сброс в центр в софте, но хардварный способ лучше.
1. Pro Mini бывает и на 3.3V. Но в Вашем случае однозначно нужен USB — из-за него для nano альтернативы нет (точней на pro так или иначе пришлось бы пользовать дополнительный адаптер, а по весу выигрыш небольшой + проблемы с переходником).
2. Барометр там нафиг не нужен (а с ним, кстати, и термометр — хотя на их основе тоже могли бы что-нибудь выдумать). Можно сэкономить поставив что-то вроде GY-9150. Либо совсем бюджетно — два датчика по-отдельности. Впрочем, и на рассматриваемый датчик цены пониже найти можно даже на том же ali.
Ну а за обзор и творческий подход с приложением рук — плюс.
PS: а вообще приложение у подобных датчков видится в квадрокоптеростроении и прочих RC-игрушках, которые можно «допиливать» под собственные нужды.
Вот пример использования подобного, но другого устройства.
Настраивается так, что не надо крутить голову далеко. Хватит немного её повернуть, чтоб глаза не сломать и виртуальный взгляд повернулся.
Пытался поиграть на своем проекторе 2,5*3,2м… странные ощущения на грани укачивания.
Те же яйца при попытке в КС поиграть.
Может со временем и привык бы, но долго такое не выдержал.
Теперь проектор только для фильмов + 3Д.