Робот на базе ESPduino. Часть 2. "It's alive!".

Всем привет и с пятницей! В конце прошлого года потянуло меня переделать один интересный проект. Оригинальные запчасти стоили довольно дорого, я уже молчу за готовый вариант. Были найдены заменители на порядок дешевле, но скетч не хотел работать как надо, а к завершению тестирования еще и несколько сервоприводов были выведены из строя благодаря моей невнимательности. Я обещал выложить текущую сборку сразу после получения недостающих деталей, но не повернулась рука показывать настолько сырой проект. На данный момент он завершен не полностью, но скетч доведен до ума, все заливается и работает без проблем. Переделан остов под используемые платы, но пока не доработаны нижняя и верхняя заглушки. Под катом текущая ситуация и свежее видео работы =)
Первая часть: Четырехногий робот на базе ESPduino. Начало.
Отдельная благодарность andreyMOZ, который не пожалел своего времени и только при мне убил несколько часов на приведение кода в нормальный вид, не опускал руки когда возникали проблемы и смог довести дело до конца.
В данный момент пользователь ReGaN активно помогает с доработкой корпуса.
Большое вам человеческое спасибо, думаю не только от меня =)
Скетч отредактирован
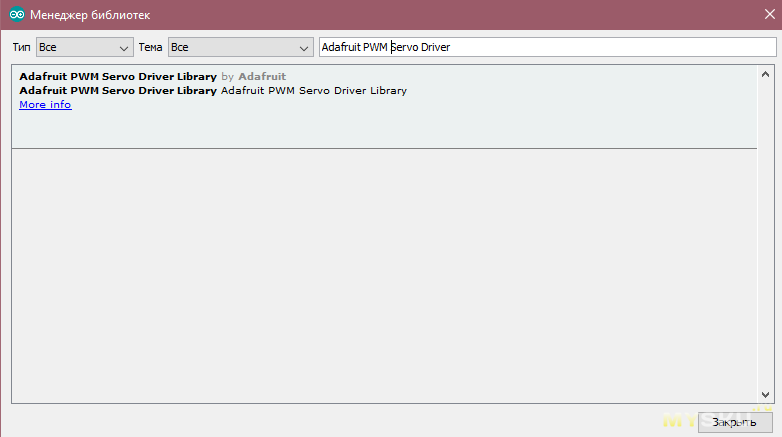
Для успешной компиляции нужна библиотека Adafruit_PWMServoDriver
Скетч — подключить библиотеку
Все остальные инструкции аналогичны тем, что были в первой части.
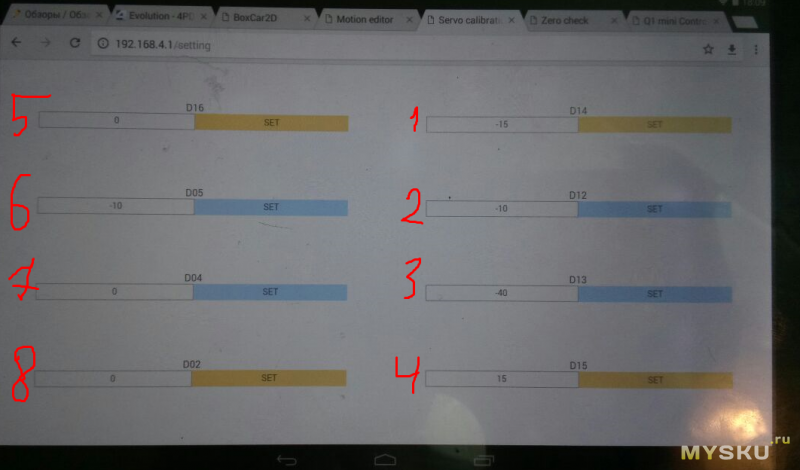
Подключение к шилду и калибровка. Я пронумеровал не по маркировке, а по порядку, по факту она начинается с нуля.
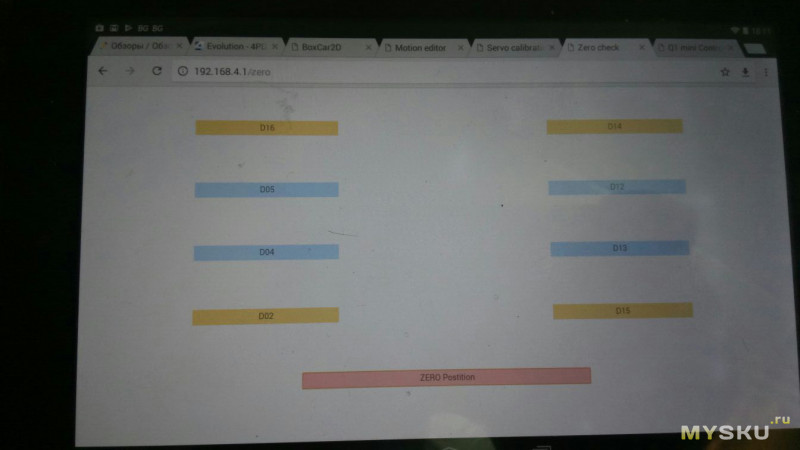
Переходим в режим обнуления и при нажатии на кнопку «ZERO Position»
Лапки должны вытянуться в стороны. Это среднее положение серв, поэтому можно продублировать мои данные, обнулить положение и только потом приделывать конечности. Если конечно вы используете аналогичные комплектующие.
Вот и все, после этого можно перейти на главный экран и попробовать встроенные команды.
Нужно придумать как лучше расположить источники питания. Самый оптимальный вариант — 2 аккумулятора 18650 с соответствующей корзиной, в идеале напечатать ее вместе с крышкой.
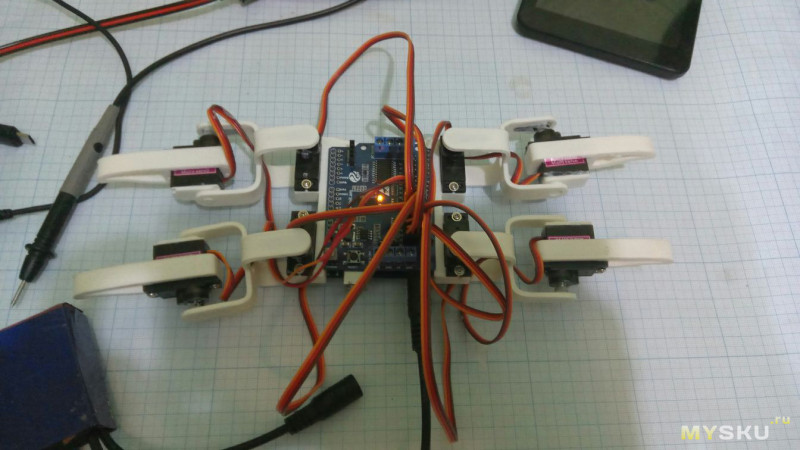
На финальной стадии платы будут перевернуты. Остов универсален и можно было это сделать сразу, но я забыл =)
В итоге провода с коннекторами будут внизу, а вверху источники питания, для которых там достаточно места.
Так же есть несколько вариантов зарядки — либо вывести разъем и добавить плату заряда на 2 банки, либо сделать часть крышки быстросъемной для оперативной смены аккумуляторов.
Скетч тоже не без косяков.
На видео наверное сложно было не заметить рывки при движении. Пытались побороть это на скорую руку, полностью от них избавились, превратив бота в ниндзю )) но возникла другая проблема. Сервы слишком далеко сдвигали конечности, они упирались в корпус и сбивалась калибровка. В данный момент методом перебора удалось добиться оптимальных параметров при которых не теряются шаги и робот не ведет себя как контуженный. Видели бы вы первый запуск ) хотелось крикнуть «оно живо!» и пристрелить бедолагу чтобы не мучился.
Думаю всё это поправимо и мы вернемся к данному вопросу после окончательной сборки.
В комментариях обязательно спросят «а зачем пилить пост о недоделанном проекте?».
Большая часть работы сделана. В данный момент стоимость комплектующих снижена с 88$(плата+сервы) до 31$.
Прототип полностью функционален, осталось разобраться с автономностью и внешним видом, в чем я и прошу помочь. Да, уже есть заинтересованные люди, у которых есть желание, но нам не всегда хватает времени =)
А еще у меня Arduino IDE нормально запускается только на планшете с 10 виндой, на двух компьютерах и ноутбуке закрывается после начальной заставки.
Первая часть: Четырехногий робот на базе ESPduino. Начало.
Благодарности
В первую очередь я хочу сказать спасибо всем кто принял участие в поиске ошибок и подсказывал пути решения: Lazy_Dragon, Offi, VortigontОтдельная благодарность andreyMOZ, который не пожалел своего времени и только при мне убил несколько часов на приведение кода в нормальный вид, не опускал руки когда возникали проблемы и смог довести дело до конца.
В данный момент пользователь ReGaN активно помогает с доработкой корпуса.
Большое вам человеческое спасибо, думаю не только от меня =)
Что мы имеем сейчас
Готов новый остовСкетч отредактирован
Для успешной компиляции нужна библиотека Adafruit_PWMServoDriver
Скетч — подключить библиотеку
Все остальные инструкции аналогичны тем, что были в первой части.
Подключение к шилду и калибровка. Я пронумеровал не по маркировке, а по порядку, по факту она начинается с нуля.
Переходим в режим обнуления и при нажатии на кнопку «ZERO Position»
Лапки должны вытянуться в стороны. Это среднее положение серв, поэтому можно продублировать мои данные, обнулить положение и только потом приделывать конечности. Если конечно вы используете аналогичные комплектующие.
Вот и все, после этого можно перейти на главный экран и попробовать встроенные команды.
Что нужно доделать
Сейчас решается вопрос с доработкой дизайна верхней и нижней крышек. ReGaN написал, что уезжает на несколько недель, поэтому процесс немного затянется.Нужно придумать как лучше расположить источники питания. Самый оптимальный вариант — 2 аккумулятора 18650 с соответствующей корзиной, в идеале напечатать ее вместе с крышкой.
На финальной стадии платы будут перевернуты. Остов универсален и можно было это сделать сразу, но я забыл =)
В итоге провода с коннекторами будут внизу, а вверху источники питания, для которых там достаточно места.
Так же есть несколько вариантов зарядки — либо вывести разъем и добавить плату заряда на 2 банки, либо сделать часть крышки быстросъемной для оперативной смены аккумуляторов.
Скетч тоже не без косяков.
На видео наверное сложно было не заметить рывки при движении. Пытались побороть это на скорую руку, полностью от них избавились, превратив бота в ниндзю )) но возникла другая проблема. Сервы слишком далеко сдвигали конечности, они упирались в корпус и сбивалась калибровка. В данный момент методом перебора удалось добиться оптимальных параметров при которых не теряются шаги и робот не ведет себя как контуженный. Видели бы вы первый запуск ) хотелось крикнуть «оно живо!» и пристрелить бедолагу чтобы не мучился.
Думаю всё это поправимо и мы вернемся к данному вопросу после окончательной сборки.
В комментариях обязательно спросят «а зачем пилить пост о недоделанном проекте?».
Большая часть работы сделана. В данный момент стоимость комплектующих снижена с 88$(плата+сервы) до 31$.
Прототип полностью функционален, осталось разобраться с автономностью и внешним видом, в чем я и прошу помочь. Да, уже есть заинтересованные люди, у которых есть желание, но нам не всегда хватает времени =)
А еще у меня Arduino IDE нормально запускается только на планшете с 10 виндой, на двух компьютерах и ноутбуке закрывается после начальной заставки.
Самые обсуждаемые обзоры
| +39 |
1640
93
|
| +43 |
1777
35
|
Только один минус у обзора — моя самооценка упала вниз (
Жду с нетерпением финальной версии.
Ну и я малость очкую комментировать голосом. С детства боязнь «сцены».
У меня всё это есть и это не мешает (а часто даже помогает) заниматься хобби такого плана.
Кстати, часто занимаюсь конструированием и программированием на даче вместе с детьми.
каждый проводит свободное время так, как ему нравится и в меру своего развития
Собранные заказать наверное дороговато будет?