Четырехногий робот на базе ESPduino. Начало.

Всем привет! Много денег потратили на распродаже? Попробую разбавить праздничную лихорадку DIY проектом. Как-то копаясь в thingiverse в поисках интересных моделей и вдохновения, наткнулся на данного робота. По стоку заложено несколько автоматических алгоритмов, плюс управление посредством wifi через компьютер, телефон либо контроллеры. Решил, что мне просто необходимо собрать такого же. Перешел на официальный сайт и приуныл — оригинальная начинка стоит 88$, но построена на базе ESP, а значит был шанс собрать аналог дешевле, тем более скетчи лежат в открытом доступе. Посылки получены, основные узлы собраны, но нужна помощь с ESPduino. Если получится прошить, я переделаю модель под новую плату и каждый желающий сможет собрать аналог менее чем за 40$, к тому же есть куда разгуляться с кастомизацией. Активным участникам могу отправить детали корпуса если согласитесь оплатить хотя бы доставку =) Подробности — под катом.
Сайт оригинального проекта: jbotq1.blogspot.ru/search/label/shop надеюсь администрация не сочтет за рекламу, информация просто для ознакомления =)
Плата ESPduino вместе с шилдом(16 серв и 2 мотора) отсюда за 19,99$
Модифицированный софт для прошивки брал тут
8 сервоприводов отсюда, 2 комплекта выходит около 20$
Модели корпуса отсюда
Напечатал все детали в несколько заходов(покрытие вспенилось из за моего нетерпения — еще будут посты об этом).

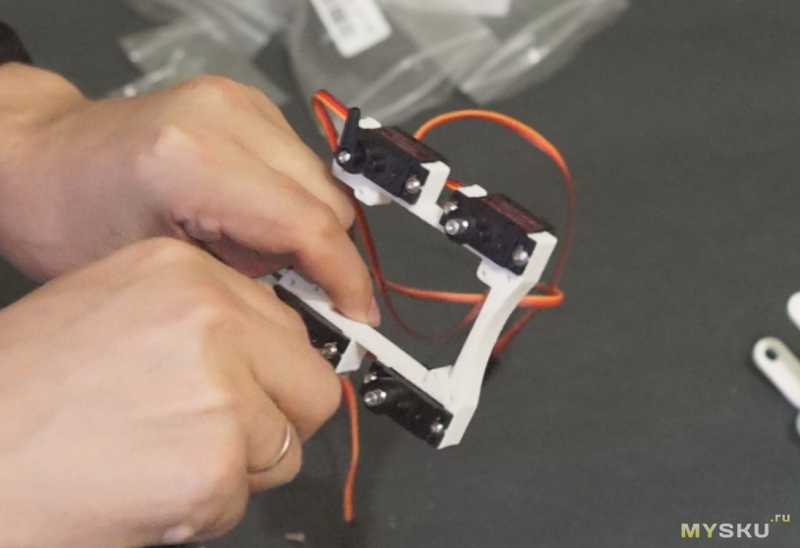
Понравились суставы — крепление приводов без единого болтика, края после нагрева загибаются и серва вставляется в пазы. Со сборкой корпуса справится каждый, из того что придется докупить — несколько шурупов для крепления верхней и нижней части на остов.

Правда все же необходимо приклеить нижнюю втулку

К ноге и корпусу приводы крепятся комплектными шурупами. Извиняюсь за часть нечетких картинок — черновик.

С закрытой нижней частью
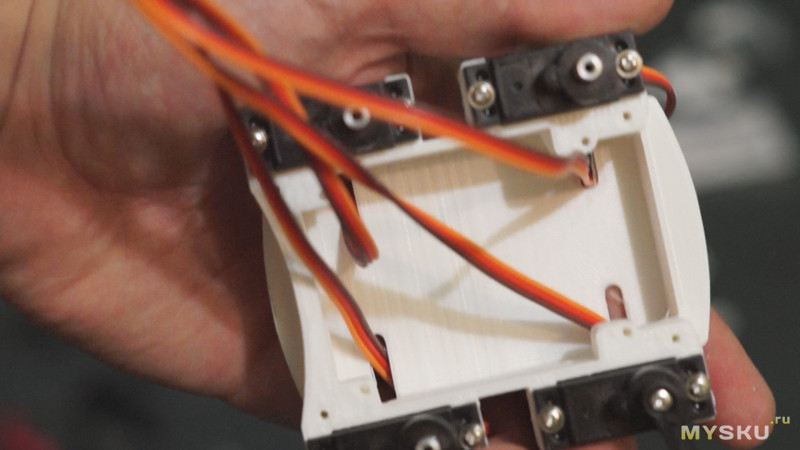
Выяснилось, что плата ESPduino немного больше оригинальной, но это мелочи — я легко переделаю крепления и все станет как родное, пока не занимался потому что столкнулся с проблемой при заливке скетча.
Официальный набор с инструкциями, скетчем и ПО закинул сюда ВНИМАНИЕ! В сборке по данной ссылке используется обычный arduino IDE, не стал убирать, может нужна именно комплектная версия.
В данный момент процесс подготовки и сборки в виде черновика. Прошу вашей помощи в доработке проекта, могу предоставить для тестов удаленный доступ к своему компьютеру с подключенной платой и камерой для проверки работоспособности.
Если все получится, я переделаю 3д модели, закину весь необходимый материал в архив, сниму нормальный видеомануал по сборке и настройке, продублирую в полноценном классическом обзоре и буду грызть форумы в сторону улучшения существующего функционала(датчик приближения, подсветка, камера), в шилде куча места для дополнительных серв и моторов.
Ну а пока так:
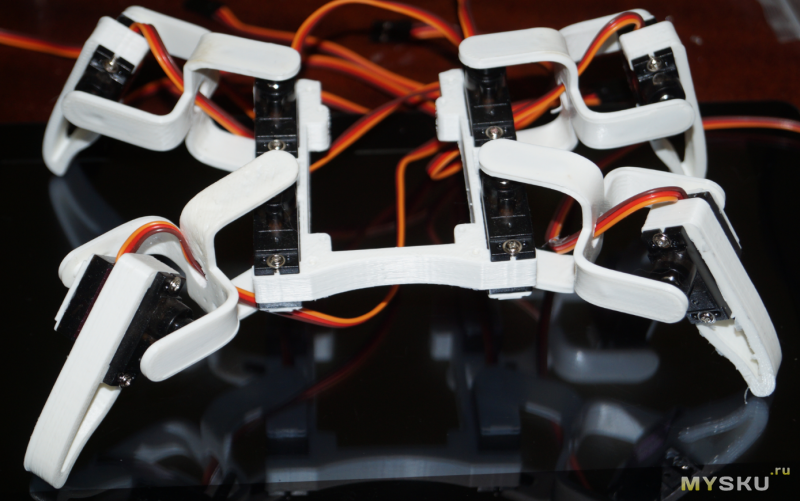
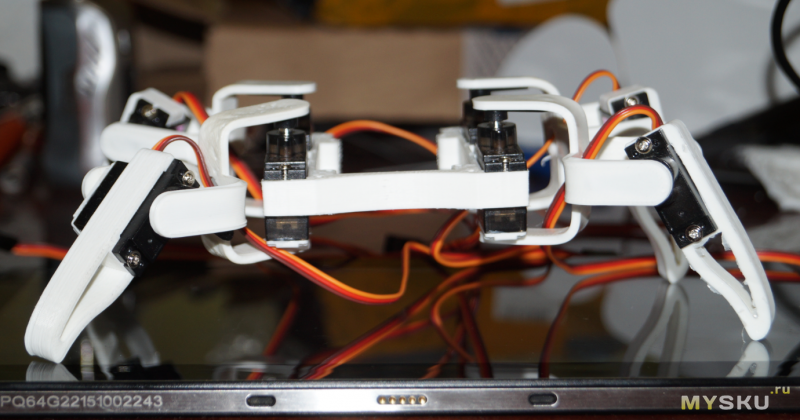
Вот что должно получиться(демо)
Скетч скомпилировался и залился, веб интерфейс вылез, сервы пока не работают, но чувствую оживление уже близко. Спасибо andreyMOZ за помощь с правильной настройкой Arduino IDE
UPD.В сети очень мало примеров работы с данной платой, хотя она успешно продается во многих площадках. На данный момент остается проблема отклика сервоприводов. Пробовал подключать серву напрямую к ESPduino — тишина, хотя скетч заливается без ошибок, но только при выборе платы generic esp8266 вместо ESPduino(ESP-13), точка доступа и веб интерфейс открывается.
UPD2. Сервы ожили! Идет переделка кода под использование шилда, если получится, у нас освободится множество пинов для дополнительных хотелок.
UPD 3 — Скетч переделан! Огромное спасибо andreyMOZ за проделанную работу, предлагаю отсыпать ему плюсцов =)
Но все же осталась одна небольшая проблемка. В ходе эксперимента умерло 3 сервопривода. Один я сломал из за невнимательности и использования в качестве удлинителя одноцветных проводов, скорее всего покинули нас из за перегрузки, т.к. были заклинившими перед оглашением диагноза. С ремонтом я не сталкивался, если у кого есть опыт — поделитесь. Заказан еще один комплект из 4 серв, надеюсь доставят оперативно. После сборки и тестирования выложу гайд сборки и настройки с нуля.
UPD4 Готовится вторая статья с полной сборкой. Что готово:
— Перерисован и распечатан корпус под используемые платы.
— Переделан скетч под стандартный шилд.
— Тестовая модель собрана и функционирует практически как оригинал.
Что не доделано:
— Не перерисованы нижняя и верхняя крышки. Не критично, но внешний вид отличается от эталона. У меня проблемы с моделированием плавных форм )) так что если у кого-то есть время и желание, напишите мне в личку, я предоставлю все необходимые данные(размеры).
— Плавность хода конечностей не такая как у эталона, но это вопрос софта, который можно решить кооперативно после релиза =)
Сайт оригинального проекта: jbotq1.blogspot.ru/search/label/shop надеюсь администрация не сочтет за рекламу, информация просто для ознакомления =)
Плата ESPduino вместе с шилдом(16 серв и 2 мотора) отсюда за 19,99$
Модифицированный софт для прошивки брал тут
8 сервоприводов отсюда, 2 комплекта выходит около 20$
Модели корпуса отсюда
Напечатал все детали в несколько заходов(покрытие вспенилось из за моего нетерпения — еще будут посты об этом).
Понравились суставы — крепление приводов без единого болтика, края после нагрева загибаются и серва вставляется в пазы. Со сборкой корпуса справится каждый, из того что придется докупить — несколько шурупов для крепления верхней и нижней части на остов.
Правда все же необходимо приклеить нижнюю втулку
К ноге и корпусу приводы крепятся комплектными шурупами. Извиняюсь за часть нечетких картинок — черновик.
С закрытой нижней частью
Выяснилось, что плата ESPduino немного больше оригинальной, но это мелочи — я легко переделаю крепления и все станет как родное, пока не занимался потому что столкнулся с проблемой при заливке скетча.
Официальный набор с инструкциями, скетчем и ПО закинул сюда ВНИМАНИЕ! В сборке по данной ссылке используется обычный arduino IDE, не стал убирать, может нужна именно комплектная версия.
В данный момент процесс подготовки и сборки в виде черновика. Прошу вашей помощи в доработке проекта, могу предоставить для тестов удаленный доступ к своему компьютеру с подключенной платой и камерой для проверки работоспособности.
Если все получится, я переделаю 3д модели, закину весь необходимый материал в архив, сниму нормальный видеомануал по сборке и настройке, продублирую в полноценном классическом обзоре и буду грызть форумы в сторону улучшения существующего функционала(датчик приближения, подсветка, камера), в шилде куча места для дополнительных серв и моторов.
Ну а пока так:
Вот что должно получиться(демо)
Скетч скомпилировался и залился, веб интерфейс вылез, сервы пока не работают, но чувствую оживление уже близко. Спасибо andreyMOZ за помощь с правильной настройкой Arduino IDE
UPD.В сети очень мало примеров работы с данной платой, хотя она успешно продается во многих площадках. На данный момент остается проблема отклика сервоприводов. Пробовал подключать серву напрямую к ESPduino — тишина, хотя скетч заливается без ошибок, но только при выборе платы generic esp8266 вместо ESPduino(ESP-13), точка доступа и веб интерфейс открывается.
UPD2. Сервы ожили! Идет переделка кода под использование шилда, если получится, у нас освободится множество пинов для дополнительных хотелок.
UPD 3 — Скетч переделан! Огромное спасибо andreyMOZ за проделанную работу, предлагаю отсыпать ему плюсцов =)
Но все же осталась одна небольшая проблемка. В ходе эксперимента умерло 3 сервопривода. Один я сломал из за невнимательности и использования в качестве удлинителя одноцветных проводов, скорее всего покинули нас из за перегрузки, т.к. были заклинившими перед оглашением диагноза. С ремонтом я не сталкивался, если у кого есть опыт — поделитесь. Заказан еще один комплект из 4 серв, надеюсь доставят оперативно. После сборки и тестирования выложу гайд сборки и настройки с нуля.
UPD4 Готовится вторая статья с полной сборкой. Что готово:
— Перерисован и распечатан корпус под используемые платы.
— Переделан скетч под стандартный шилд.
— Тестовая модель собрана и функционирует практически как оригинал.
Что не доделано:
— Не перерисованы нижняя и верхняя крышки. Не критично, но внешний вид отличается от эталона. У меня проблемы с моделированием плавных форм )) так что если у кого-то есть время и желание, напишите мне в личку, я предоставлю все необходимые данные(размеры).
— Плавность хода конечностей не такая как у эталона, но это вопрос софта, который можно решить кооперативно после релиза =)
Самые обсуждаемые обзоры
| +39 |
1640
93
|
| +43 |
1777
35
|
Насчет платы — не проверяли совместимость с Wemos D1? (https://www.banggood.com/WeMos-D1-R2-WiFi-ESP8266-Development-Board-Compatible-Arduino-UNO-Program-By-Arduino-IDE-p-1011870.html?rmmds=search&cur_warehouse=CN)
Она всего чуть больше $5 стоит.
Это все по поводу снижения стоимости. Насчет кода не скажу, такой платы в наличии не имею. Но я бы копал в сторону версии Ардуино студии… Попробуйте поновее поставить.
П.С. Комплектные шурупы серв — полное г… — слизываются как пластилин обычной отверткой при закручивании в пластик с отверстием чуть меньшего диаметра…
А по сервам если не сложно, поделитесь ссылкой на проверенный лот — я Али не доверяю в плане соответствия товара картинкам и заявленным характеристикам.
https://aliexpress.com/item/item/1Pcs-MG90S-Micro-Metal-Gear-High-Speed-9g-Servo-for-RC-Helicopter-Plane-Car-Boat/1696044101.html
В мою страну бесплатная доставка до 3-х штук, в Россию — видел, что доставка платная, поэтому, может, стоит поискать еще.
Подозреваю, что и обычный ардуиновский shield будет работать — 3.3в ему хватает. Тогда еще дешевле.
П.С. Как раз собираю miniKame (сборная солянка из этого: www.thingiverse.com/thing:1265766 + www.thingiverse.com/thing:1428651 + www.thingiverse.com/thing:2443706). Все напечатано, сервы собраны, питание, плата и понижайка в наличии — времени нетууууууу… Там тоже не все гладко с прошивкой, но все решаемо.
У меня слабые познания в программировании, увидел на картинке ардуинку сразу с шилдом — вроде недорого и должно работать раз вместе кладут ))
Думал соберу, залью скетч, после старта максимум ноги будут двигаться хаотично, подправлю код и все будет хорошо. Ан нет, не компилируется )
Спасибо, буду ждать результатов.
Вот такие детали примерно по времени / деньгам сколько печатать?
hackaday.io/project/20458-open-source-underwater-glider
Хочу сделать, а принтера нет по-близости.
Тоже както искал гексапода. Думал начну собирать. Но в итоге наткнулся на другую ерунду, более интересную. Сейчас её собираю. Если получится, тоже запилю топик.
Вдруг тоже хочу, но не знаю об этом:)))
— Как?
— Завтра расскажу.
А самое главное интересно собирать с ребенком.
Как обучающий конструктор+основы программирования
Когда же детство в одном месте успокоится?:)
И сразу несколько мыслей:
1. С чем полностью согласен, так это с датчиками приближения. Автоматический бот без них никуда.
2. Вместо «глаз» из аккумуляторов надо бы FPV-камеры сделать.
3. А шесть ног не лучше? Мать-природа одобрит:)
3. Шесть ног дороже, никто не мешает добавить еще пару при сильном желании ) максимум можно добавить еще 4(16 серв подерживает).
2. Глаз в нашем случае нет, в оригинальной сборке там электролиты вроде, ну или аккумы, я планирую использовать 18650, можно даже крепеж сделать специально под них.
1. Хотелось бы чтобы бот был больше управляемый, чем автоматический, но для авторежимов датчик приближения необходим, да, например режим разведки с избеганием препятствий. Еще бы ик датчик на обрывы(лестница, ямы).
а не просто FPV.
www.robotshop.com/letsmakerobots/rs4-self-balancing-raspberry-pi-image-processing-robot
У Вас есть время пообщаться в личке/скайпе?
ESP 2.3.0
Ну и если разговаривать по поводу экономии, то это связка nodemcu v3 + PCA9685 (3$+2$), получаем 16 каналов для серв при использовании только i2c канала от esp.
P.S. На такой связке сейчас делаю себе шим контроллер для светодиодных лент
UPD. Нашел, 3х3 см, а вот шилда размер из просмотренных магазинов никто не укаал.
И все же, не подскажете, что за микрухи у Вас на шилде?
Максимум что смог выжать из камеры телефона ) фотоаппарат забыл
Ну и вариант для расширения на 6-ногого (по 3 сервы на ногу) робота остается (2 канала можно прямо от есп взять)
По даташиту ams1117 на вход максимально поддерживает до 18 вольт, 2s литий думаю переживет
2. И как бы договорится на корпус с доставкой? (У меня пока нет принтера)
Когда все заработает, я напишу еще пост с обновлением, новым скетчем и перерисую модель корпуса, так что пока можете не торопиться.
где-то попадался проект Hexapod тоже опенсорсный…
А там уже думайте сами, справитесь самостоятельно или нет. Заказанные сервы не трекаются, не уверен что придут быстро…
Заливали в него, код изменен, но родной тоже заливался, просто не работал как надо. Я все жду серву, как только придет, допилю корпус, соберу и выложу готовый проект с моделями, скетчем и подробным описанием )
С нетерпением жду результатов, и… спасибо за труды.
Вот же я невнимательный:(