Гоночный микро FPV-квадрокоптер X-Racer X-1

- Цена: $75.99
- Перейти в магазин
Не секрет, что Drone-Racing (FPV Racing) с каждым днём всё больше и больше набирает популярность и уже проводятся международные чемпионаты по данному классу моделей. В основном в гонках принимают участие модели с рамами, рассчитанными на 4-х или 5-ти дюймовые пропеллеры. И для тренировок и закрепления навыков полёта такие модели обычно требуют достаточно просторных открытых площадок. А как же быть в межсезонье, когда за окном глубокая осень, льёт непрекращающийся дождь, или лютая зима с морозами под минус 30. «Сидеть в симуляторе» — скажете Вы. А вот и нет. Оказывается, есть такие миниатюрные квадрики, которые умещаются на ладони и обладают отменными лётными характеристиками. Мало того, эти модели выделены в отдельный класс, и с ними проводятся соревнования. Одну из таких моделей от бренда fpvmodel (он же магазин fpvmodel.com) мы рассмотрим в этой статье.
Поставляется микрокоптер X-Racer X-1 в очень оригинальной упаковке: небольшом мягком кейсе. Обычно китайские производители запаковывают таким образом наушники и другую мелкую электронику. Упаковка брендированная, сверху мы видим надпись «X-RACER» и интернет — адрес магазина fpvmodel. Данный кейс можно использовать для транспортировки модели.


Внутри кейса мы найдём сам квадрокоптер X-Racer X-1, фирменные наклейки и дополнительные принадлежности. Порадовало, что всё было запаковано в индивидуальные вакуумные пакеты. Какая-либо инструкция отсутствует, так как данная модель рассчитана на опытных пользователей, знающих как настраивать аппаратуру и конфигурировать полётные контроллеры самостоятельно.


Четыре запасных пропеллера диаметром 31 мм:

Не знаю зачем, но производитель положил в комплект винты и демпферы для крепления основной платы контроллера к раме модели.

Два 1S HV аккумулятора емкостью 250mah и токоотдачей 60C. Данный аккумулятор обеспечивает среднее время полёта в районе 3-4 минут в зависимости от того, как Вы будете работать газом.

USB зарядное устройство. Среднее время зарядки аккумулятора около 35-40 минут. Ток заряда 350 мА. По окончанию процесса зарядки на зарядном устройстве загорается зелёный светодиод. Для первых полётов вполне годный вариант. Если Вы летаете на соревнованиях по микрокоптерам или тренируетесь, Вам потребуется много аккумуляторов и специальное многопортовое зарядное устройство.

Микрокоптер X-Racer X-1 в основном предназначен для соревнований в классе «индатрикс» (микроколлекторные), а также тренировок в закрытых помещениях холодными зимними вечерами. Можно летать и на улице на небольшой площадке в сухую безветренную погоду.
Как выглядят подобные соревнования микродронов можно узнать, посмотрев видео представленное ниже.
Межосевое диагональное расстояние между моторами 64 мм. Размеры рамы, включая защиту пропеллеров, составляют 81 х 81 мм. Вес без аккумулятора 28,1 г. Вес с комплектным аккумулятором 34,5 г.


Рама модели выполнена из материала очень похожего на лексан. Он одновременно очень прочный и в тоже время гибкий. Сломать такую раму можно разве что проехавшись по ней автомобилем. В контексте данного коптера, рама просто неубиваемая. Хотя, если поломка случится, новая рама стоит всего 2$ вместе с канопой.

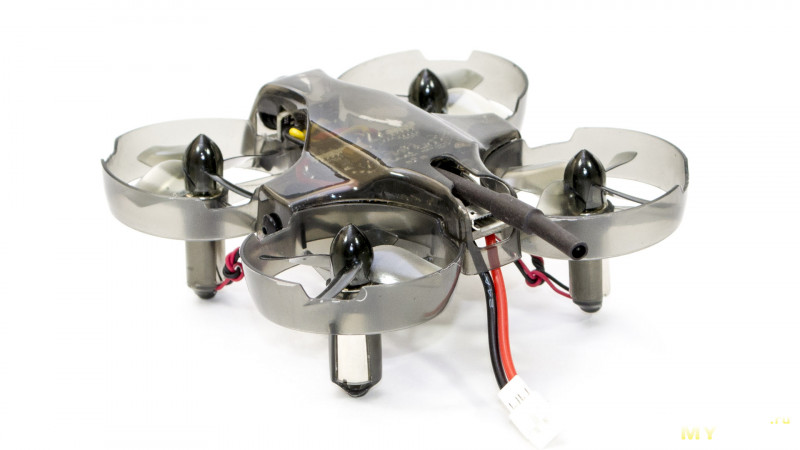
Ниже приведу подробные фотографии X-Racer X-1, выполненные с разных ракурсов.

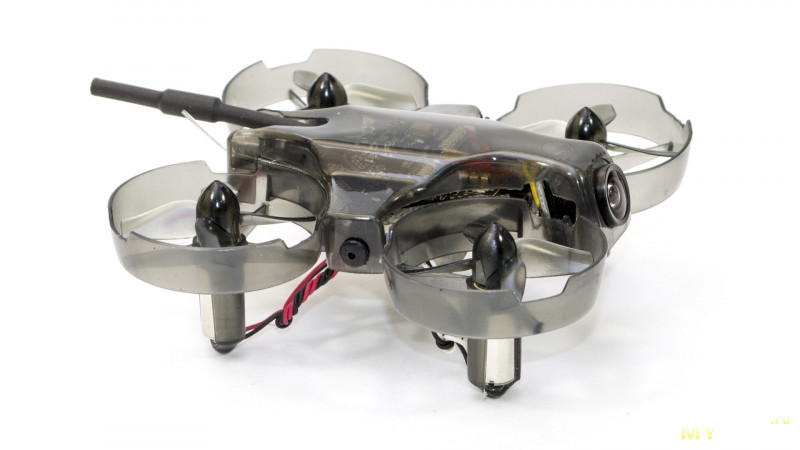




Сверху вся электроника коптера прикрыта быстросъёмной пластиковой канопой. В магазине при заказе можно выбрать цвет канопы из четырёх возможных вариантов.

На квадрокоптере применены коллекторные электромоторы размера 7x16 мм, 14000 Об/В. Для их быстрой замены предусмотрены разъёмные соединения моторов с основной платой полётного контроллера. Пропеллеры 4-х лопастные, диаметром 31 мм.

Глазами пилота квадрокоптера X-Racer X-1 является миниатюрная FPV камера, имеющая следующие характеристики:
Соотношение сторон — 4:3;
Тип матрицы — CCD 1/4;
Видеостандарт – PAL;
Разрешение матрицы в пикселях — 720×576;
Горизонтальное разрешение матрицы — 800TVL;
Скорость работы электронного затвора — 1/50-1/100000;
Соотношение сигнал/шум — >48Db
Минимальная освещённость — 0.1 Lux;
Потребляемый ток — 90 мА;
Питание- 3.3-5 В.
Камера зафиксирована на раме квадрокоптера каплей термоклея и, при необходимости, её можно демонтировать с рамы. Объектив уже настроен на максимальную резкость и также зафиксирован на корпусе камеры каплей лака.
Надо отметить, что для такой крохотной камеры, она выдаёт просто потрясающее изображение и все её параметры настроены на оптимальную работу практически во всех условиях освещённости. При недостаточной освещённости камера не переходит в ЧБ режим, но, несмотря на это, качество картинки остаётся приемлемым.

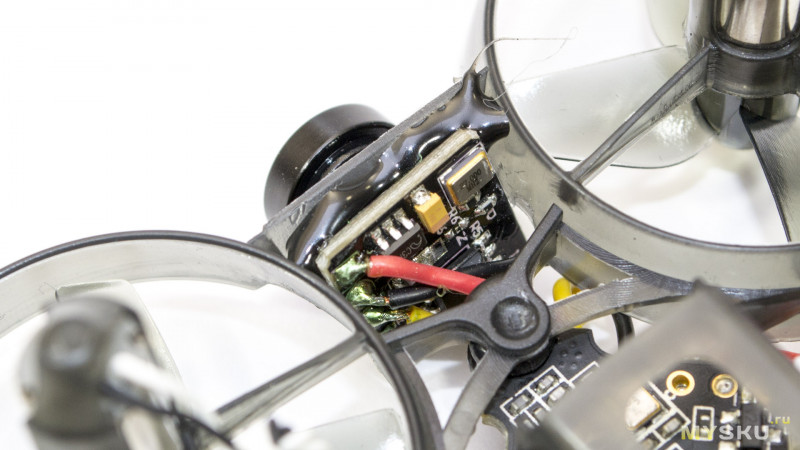
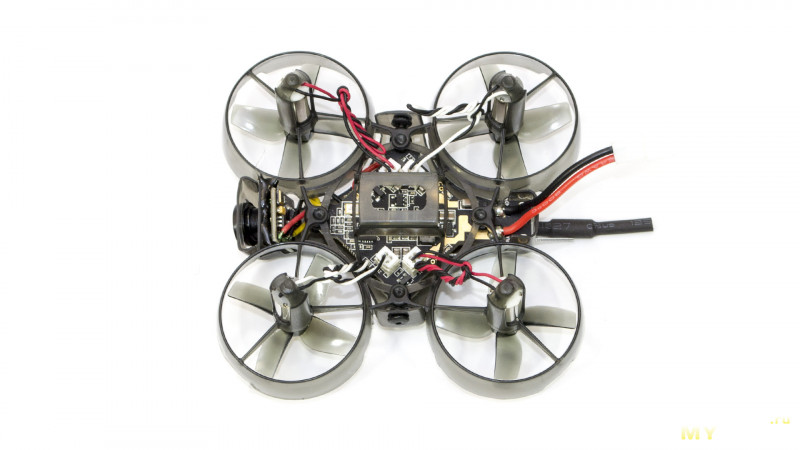
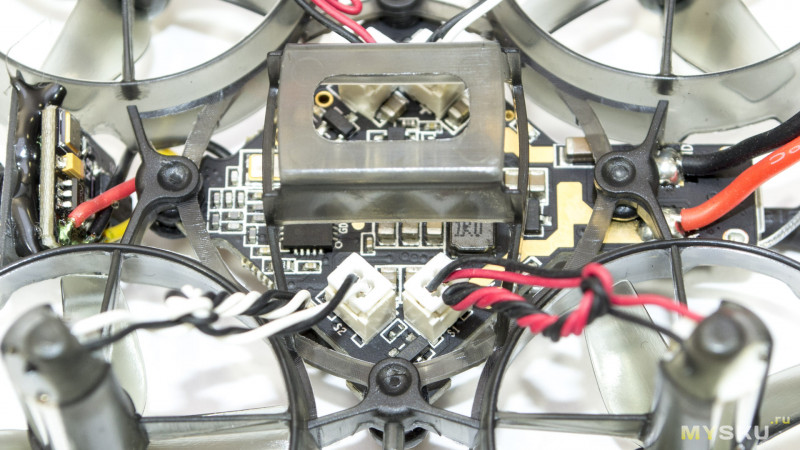
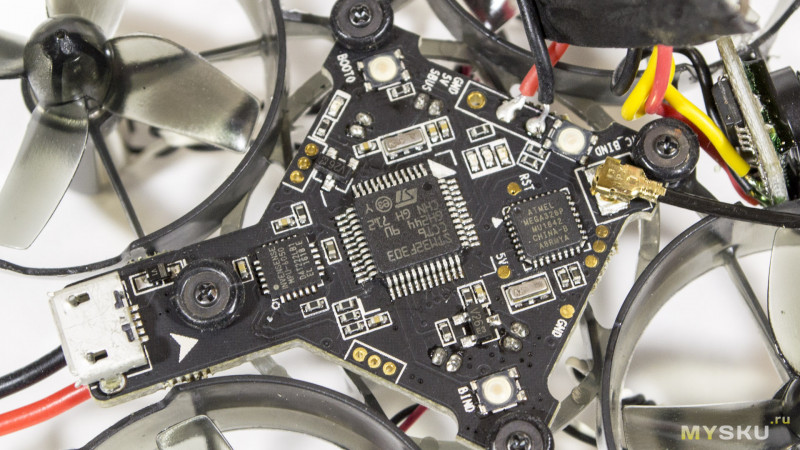
На основной плате микрокоптера интегрирован полноценный контроллер F3 (STM32F303), в качестве сенсора использован чип MPU-6050, в котором интегрирован трёхосевой гироскоп и акселерометр. Подключить плату к компьютеру для настройки полётного контроллера в программе Betaflight можно через распаянный на ней USB — разъём. Также в плату интегрирован приёмник для аппаратур фирмы FrSky, работающий в режиме D8. К сожалению, аппаратура других производителей, не поддерживается. Скорее всего, это вызвано тем, что аппаратуры FrSky Taranis завоевали огромную часть рынка и являются основным средством управления квадрокоптерами для дрон-рейсеров.
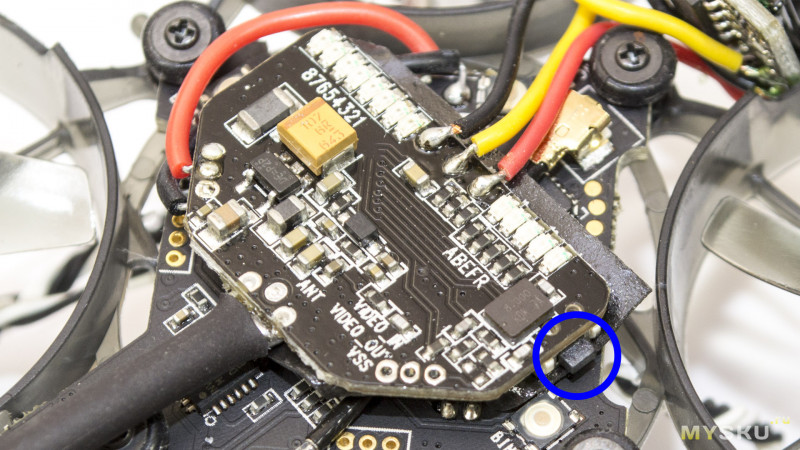
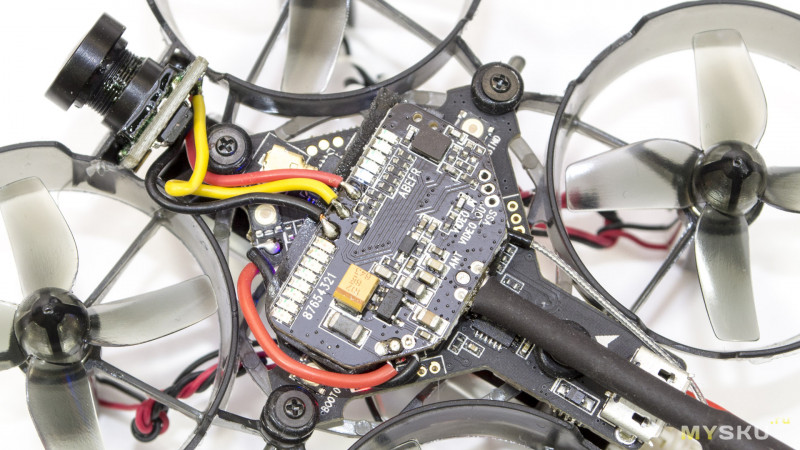
Сверху платы контроллера установлен 48-ми канальный видео — передатчик, работающий на частоте 5.8 ГГц. Мощность передатчика фиксированная и составляет 25mw. Этого более чем достаточно для полётов в пределах квартиры или небольшой площадки. Переключение каналов и частотных сеток осуществляется единственной кнопкой. Короткое нажатие переключает канал от 1 до 8, длительное нажатие на кнопку переключает частотную сетку передатчика (ABEFR). При смене каналов и частотной сетки над маркировкой каналов, нанесённой на плату, будут загораться соответствующие светодиоды. В качестве антенны использован диполь, который для защиты помещён в термоусадку.

В магазине fpvmodel для микрокоптера X-Racer X-1 доступны запасные части и принадлежности. Полный список приведу ниже:
4-х портовое зарядное устройство для аккумуляторов — 4 Ports 1S Lipo Charger With XT60 Plug for X-Racer X-1;
Комплект из двух запасных аккумуляторов — X-Racer HV 1S 250mah 3.8V 60C High Voltage RC LiPo Battery 2 pcs;
Запасные моторы для X-Racer X-1 — Dragonfly 7x16mm 14000KV Coreless Motor for X-Racer X1;
Рама и канопа для X-Racer X-1 — X-Racer X-1 Replacement Kit of Frame and Canopy;
Микрокамера — Dragonfly Low Profile Micro FPV Camera;
Видео — передатчик — Dragonfly 25mw 48CH Micro VTX For X-Racer X-1 and KL-EX90;
Запасные пропеллеры — X-Racer 31mm 4 Blade Clear Propellers for Tiny Whoop and X-Racer X1;
Комплект бортовой электроники (контроллер, камера, видео — передатчик) — Set of Flight Controller, Camera, TX and Antenna for X-Racer X-1.
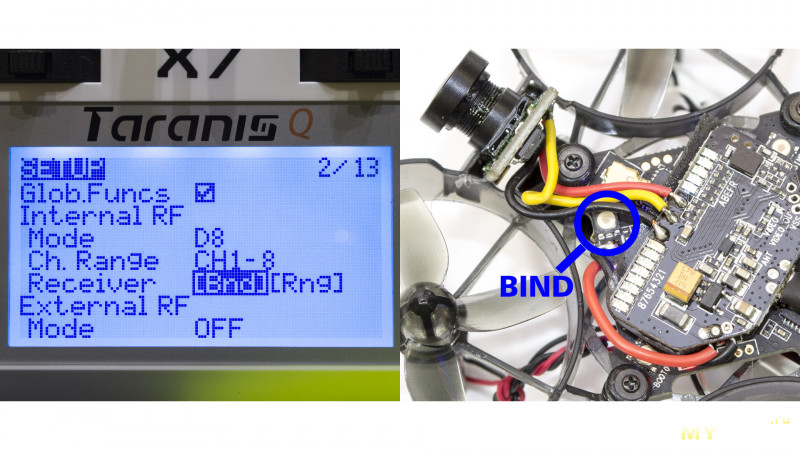
Прежде чем настраивать полётный контроллер нам необходимо подружить приёмник коптера с Вашим передатчиком. Выполнить – BIND. Для этого включаем Ваш таранис. Входим в меню настройки модели. Переходим на страницу 2. В строке MODE выбираем тип приёмника D8 и активируем параметр «Bnd». На плате контроллера зажимаем кнопку BIND и не отпуская кнопку подключаем аккумулятор к модели. После этой процедуры приёмник коптера будет настроен именно на Ваш передатчик.
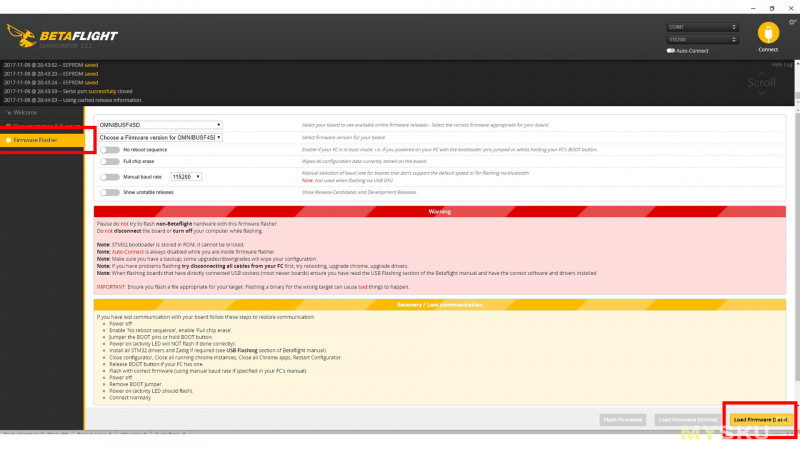
На полётный контроллер была уже установлена прошивка betaflight_3.1.5, которая уже оптимально сконфигурирована для данной модели опытными пилотами. Но всё же рекомендую скачать с сайта магазина новую сконфигурированную прошивку betaflight_3.2.0 (ссылка на архив с прошивкой), и прошить ей контроллер через конфигуратор betaflight. При прошивке никаких кнопок DFU нажимать на контроллере не потребуется, контроллер сам перейдёт в DFU Mod.
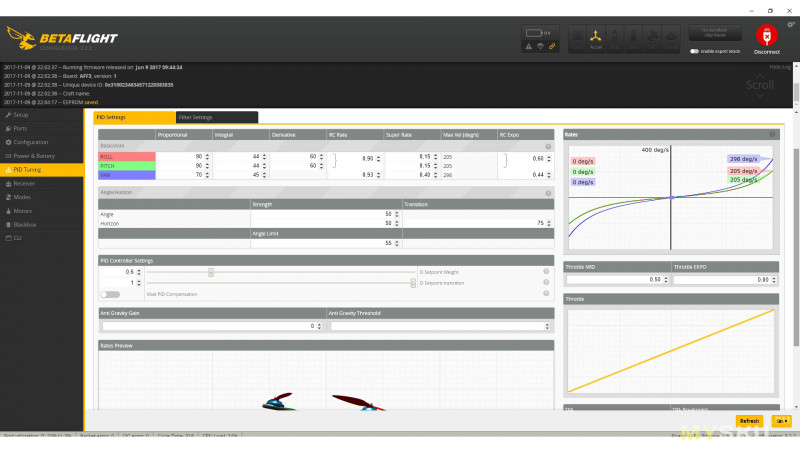
Так как прошивка уже оптимально сконфигурирована, нам только останется настроить полётные режимы, немного подкорректировать «Rate» и экспоненты «по вкусу». Для моей малогабаритной квартиры изначальные настройки показались мне слишком резкими и «шустрыми». Я «придавил» расходы и увеличил экспоненту, настройки PID регулятора я не трогал, модель и так летит как по рельсам.
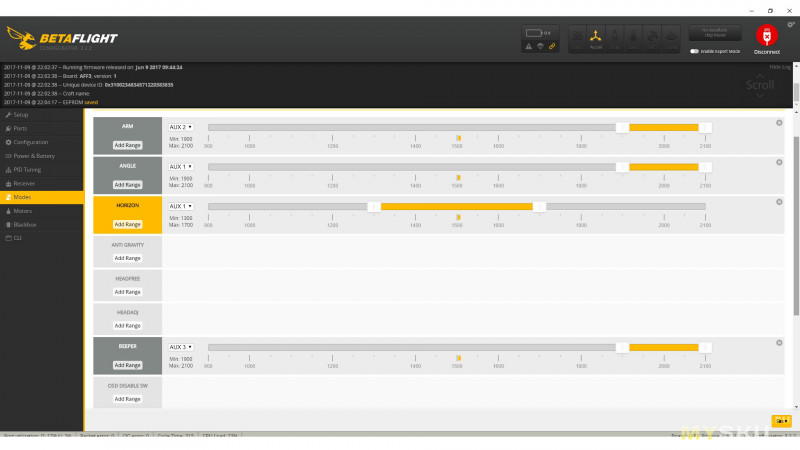
Устанавливаем полётные режимы на Ваши любимые переключатели. Естественно надо настроить ARM (активация коптера) и хотя бы один полётный режим, например, режим стабилизации ANGLE. При активации режима пищалки BEEPER, наш микрокоптер не издаёт звуков по понятным причинам, пищалки на нем из-за экономии веса, просто нет. Но зато активно перемигивается светодиодами, расположенными на плате. В принципе, данный режим можно не настраивать.
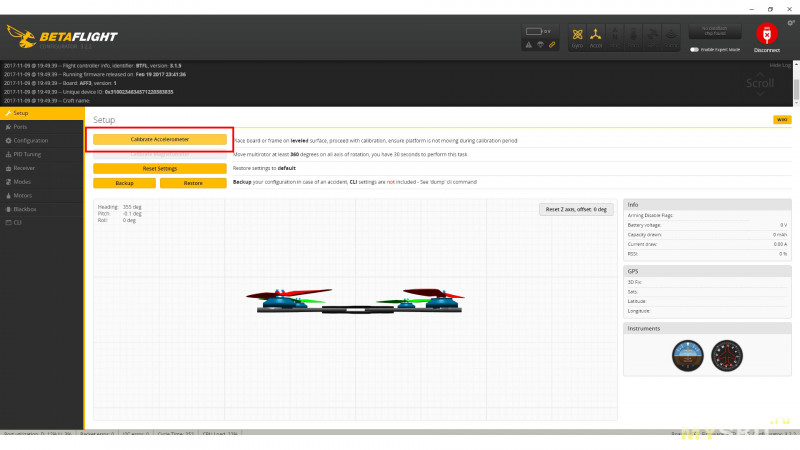
Остаётся только откалибровать акселерометр. Для этого оставляем модель неподвижной и в конфигураторе жмем кнопку «Callibrate Accelerometr».
Настройка квадрокоптера закончена. Теперь остаётся подключить аккумуляторную батарею и отправиться в полёт.

На «задушенных» настройках можно неплохо летать даже в небольшом помещении. Но если Вы обладатель огромного коттеджа, то там всегда надется место, где легко «разлетаться» и поддать газку.
Летит отлично, управляется как по «рельсам», радует, что мозгом квадрика является полноценный контроллер F3, с ним всегда найдется место для творчества. Можно часами сидеть настраивать пиды и добиваться идеального для Вас поведения квадрика в полёте. Те, для кого подобные «операции» в новинку, могут вообще ничего не настраивать, кроме полётных режимов, и так летит отлично. Немаловажную роль играет продуманность всей конструкции: все элементы электроники спрятаны внутри рамы и закрыты канопой. Я видел много «мелколётов» от разных китайских производителей и все они отличались очень хрупкой рамой, нестойкой к серьёзным ударам. Крашестойкость X-Racer X-1 просто поражает, он выдерживает страшные удары и падения, единственное, что при серьёзных столкновениях он иногда теряет пропы, ставим их на вал мотора обратно и можно снова летать. Если у Вас уже имеется опыт полётов на гоночных квадрокоптерах с рамами, рассчитанными на 4-х или 5-ти дюймовые пропеллеры, могу смело рекомендовать X-Racer X-1 для домашних полетушек. Получите много фана и удовольствия.
Упаковка и комплектация
Поставляется микрокоптер X-Racer X-1 в очень оригинальной упаковке: небольшом мягком кейсе. Обычно китайские производители запаковывают таким образом наушники и другую мелкую электронику. Упаковка брендированная, сверху мы видим надпись «X-RACER» и интернет — адрес магазина fpvmodel. Данный кейс можно использовать для транспортировки модели.
Внутри кейса мы найдём сам квадрокоптер X-Racer X-1, фирменные наклейки и дополнительные принадлежности. Порадовало, что всё было запаковано в индивидуальные вакуумные пакеты. Какая-либо инструкция отсутствует, так как данная модель рассчитана на опытных пользователей, знающих как настраивать аппаратуру и конфигурировать полётные контроллеры самостоятельно.
Четыре запасных пропеллера диаметром 31 мм:
Не знаю зачем, но производитель положил в комплект винты и демпферы для крепления основной платы контроллера к раме модели.
Два 1S HV аккумулятора емкостью 250mah и токоотдачей 60C. Данный аккумулятор обеспечивает среднее время полёта в районе 3-4 минут в зависимости от того, как Вы будете работать газом.
USB зарядное устройство. Среднее время зарядки аккумулятора около 35-40 минут. Ток заряда 350 мА. По окончанию процесса зарядки на зарядном устройстве загорается зелёный светодиод. Для первых полётов вполне годный вариант. Если Вы летаете на соревнованиях по микрокоптерам или тренируетесь, Вам потребуется много аккумуляторов и специальное многопортовое зарядное устройство.
Описание и характеристики
Микрокоптер X-Racer X-1 в основном предназначен для соревнований в классе «индатрикс» (микроколлекторные), а также тренировок в закрытых помещениях холодными зимними вечерами. Можно летать и на улице на небольшой площадке в сухую безветренную погоду.
Как выглядят подобные соревнования микродронов можно узнать, посмотрев видео представленное ниже.
Межосевое диагональное расстояние между моторами 64 мм. Размеры рамы, включая защиту пропеллеров, составляют 81 х 81 мм. Вес без аккумулятора 28,1 г. Вес с комплектным аккумулятором 34,5 г.
Рама модели выполнена из материала очень похожего на лексан. Он одновременно очень прочный и в тоже время гибкий. Сломать такую раму можно разве что проехавшись по ней автомобилем. В контексте данного коптера, рама просто неубиваемая. Хотя, если поломка случится, новая рама стоит всего 2$ вместе с канопой.
Ниже приведу подробные фотографии X-Racer X-1, выполненные с разных ракурсов.
Сверху вся электроника коптера прикрыта быстросъёмной пластиковой канопой. В магазине при заказе можно выбрать цвет канопы из четырёх возможных вариантов.
На квадрокоптере применены коллекторные электромоторы размера 7x16 мм, 14000 Об/В. Для их быстрой замены предусмотрены разъёмные соединения моторов с основной платой полётного контроллера. Пропеллеры 4-х лопастные, диаметром 31 мм.
Глазами пилота квадрокоптера X-Racer X-1 является миниатюрная FPV камера, имеющая следующие характеристики:
Соотношение сторон — 4:3;
Тип матрицы — CCD 1/4;
Видеостандарт – PAL;
Разрешение матрицы в пикселях — 720×576;
Горизонтальное разрешение матрицы — 800TVL;
Скорость работы электронного затвора — 1/50-1/100000;
Соотношение сигнал/шум — >48Db
Минимальная освещённость — 0.1 Lux;
Потребляемый ток — 90 мА;
Питание- 3.3-5 В.
Камера зафиксирована на раме квадрокоптера каплей термоклея и, при необходимости, её можно демонтировать с рамы. Объектив уже настроен на максимальную резкость и также зафиксирован на корпусе камеры каплей лака.
Надо отметить, что для такой крохотной камеры, она выдаёт просто потрясающее изображение и все её параметры настроены на оптимальную работу практически во всех условиях освещённости. При недостаточной освещённости камера не переходит в ЧБ режим, но, несмотря на это, качество картинки остаётся приемлемым.
На основной плате микрокоптера интегрирован полноценный контроллер F3 (STM32F303), в качестве сенсора использован чип MPU-6050, в котором интегрирован трёхосевой гироскоп и акселерометр. Подключить плату к компьютеру для настройки полётного контроллера в программе Betaflight можно через распаянный на ней USB — разъём. Также в плату интегрирован приёмник для аппаратур фирмы FrSky, работающий в режиме D8. К сожалению, аппаратура других производителей, не поддерживается. Скорее всего, это вызвано тем, что аппаратуры FrSky Taranis завоевали огромную часть рынка и являются основным средством управления квадрокоптерами для дрон-рейсеров.
Сверху платы контроллера установлен 48-ми канальный видео — передатчик, работающий на частоте 5.8 ГГц. Мощность передатчика фиксированная и составляет 25mw. Этого более чем достаточно для полётов в пределах квартиры или небольшой площадки. Переключение каналов и частотных сеток осуществляется единственной кнопкой. Короткое нажатие переключает канал от 1 до 8, длительное нажатие на кнопку переключает частотную сетку передатчика (ABEFR). При смене каналов и частотной сетки над маркировкой каналов, нанесённой на плату, будут загораться соответствующие светодиоды. В качестве антенны использован диполь, который для защиты помещён в термоусадку.
В магазине fpvmodel для микрокоптера X-Racer X-1 доступны запасные части и принадлежности. Полный список приведу ниже:
4-х портовое зарядное устройство для аккумуляторов — 4 Ports 1S Lipo Charger With XT60 Plug for X-Racer X-1;
Комплект из двух запасных аккумуляторов — X-Racer HV 1S 250mah 3.8V 60C High Voltage RC LiPo Battery 2 pcs;
Запасные моторы для X-Racer X-1 — Dragonfly 7x16mm 14000KV Coreless Motor for X-Racer X1;
Рама и канопа для X-Racer X-1 — X-Racer X-1 Replacement Kit of Frame and Canopy;
Микрокамера — Dragonfly Low Profile Micro FPV Camera;
Видео — передатчик — Dragonfly 25mw 48CH Micro VTX For X-Racer X-1 and KL-EX90;
Запасные пропеллеры — X-Racer 31mm 4 Blade Clear Propellers for Tiny Whoop and X-Racer X1;
Комплект бортовой электроники (контроллер, камера, видео — передатчик) — Set of Flight Controller, Camera, TX and Antenna for X-Racer X-1.
Настройка
Прежде чем настраивать полётный контроллер нам необходимо подружить приёмник коптера с Вашим передатчиком. Выполнить – BIND. Для этого включаем Ваш таранис. Входим в меню настройки модели. Переходим на страницу 2. В строке MODE выбираем тип приёмника D8 и активируем параметр «Bnd». На плате контроллера зажимаем кнопку BIND и не отпуская кнопку подключаем аккумулятор к модели. После этой процедуры приёмник коптера будет настроен именно на Ваш передатчик.
На полётный контроллер была уже установлена прошивка betaflight_3.1.5, которая уже оптимально сконфигурирована для данной модели опытными пилотами. Но всё же рекомендую скачать с сайта магазина новую сконфигурированную прошивку betaflight_3.2.0 (ссылка на архив с прошивкой), и прошить ей контроллер через конфигуратор betaflight. При прошивке никаких кнопок DFU нажимать на контроллере не потребуется, контроллер сам перейдёт в DFU Mod.
Так как прошивка уже оптимально сконфигурирована, нам только останется настроить полётные режимы, немного подкорректировать «Rate» и экспоненты «по вкусу». Для моей малогабаритной квартиры изначальные настройки показались мне слишком резкими и «шустрыми». Я «придавил» расходы и увеличил экспоненту, настройки PID регулятора я не трогал, модель и так летит как по рельсам.
Устанавливаем полётные режимы на Ваши любимые переключатели. Естественно надо настроить ARM (активация коптера) и хотя бы один полётный режим, например, режим стабилизации ANGLE. При активации режима пищалки BEEPER, наш микрокоптер не издаёт звуков по понятным причинам, пищалки на нем из-за экономии веса, просто нет. Но зато активно перемигивается светодиодами, расположенными на плате. В принципе, данный режим можно не настраивать.
Остаётся только откалибровать акселерометр. Для этого оставляем модель неподвижной и в конфигураторе жмем кнопку «Callibrate Accelerometr».
Настройка квадрокоптера закончена. Теперь остаётся подключить аккумуляторную батарею и отправиться в полёт.
Выводы
На «задушенных» настройках можно неплохо летать даже в небольшом помещении. Но если Вы обладатель огромного коттеджа, то там всегда надется место, где легко «разлетаться» и поддать газку.
Летит отлично, управляется как по «рельсам», радует, что мозгом квадрика является полноценный контроллер F3, с ним всегда найдется место для творчества. Можно часами сидеть настраивать пиды и добиваться идеального для Вас поведения квадрика в полёте. Те, для кого подобные «операции» в новинку, могут вообще ничего не настраивать, кроме полётных режимов, и так летит отлично. Немаловажную роль играет продуманность всей конструкции: все элементы электроники спрятаны внутри рамы и закрыты канопой. Я видел много «мелколётов» от разных китайских производителей и все они отличались очень хрупкой рамой, нестойкой к серьёзным ударам. Крашестойкость X-Racer X-1 просто поражает, он выдерживает страшные удары и падения, единственное, что при серьёзных столкновениях он иногда теряет пропы, ставим их на вал мотора обратно и можно снова летать. Если у Вас уже имеется опыт полётов на гоночных квадрокоптерах с рамами, рассчитанными на 4-х или 5-ти дюймовые пропеллеры, могу смело рекомендовать X-Racer X-1 для домашних полетушек. Получите много фана и удовольствия.
| +20 |
6274
11
|
| +135 |
35420
186
|
Самые обсуждаемые обзоры
| +160 |
2152
88
|
| +56 |
3225
54
|
| +78 |
4674
37
|
| +105 |
3483
26
|
по идее нужно прилично разогнать его, чтоб хоть как то было опасно, веса там 30-40г (а если корпус снять, то еще меньше)
Мне и в голову он прилетал, совсем не больно.
Пользуясь случаем:
Не видел не кто микродронов для Апы Радиолинк AT9s?
Не хотчется заставлять микродрон отдельный приемник таскать…
Вот мои прошлогодние полетушки, я на нем наверно около недели летал
youtu.be/y9wK0oTzrac?list=UUE5mXDWwCsTymdJfjF7a7lQ&t=57
Но это — самосбор на 615 моторах и F3. Качество записи ужасно изза изикапа, на тот момент просто не чем было писать двр)
с другой полноценные бкашки Lizard 95 за 109$ или Aurora 90 за 120$
Боюсь у Вашего пациента за 76$ мало шансов…
Душим расходы и увеличиваем экспоненты прямо в аппе- даже в бетафлай лезть не надо. И тошним по своим аппартаментам…
Вот только от симулятора в таких условиях толку гораздо больше.
И, как тут правильно заметили, на БК дома особо не погоняешь, БК — это пока для двора больше. У них мощи столько, что потолок продырявить как делать нефиг, коллектор более безопасен для домашней утвари. Нет, можно, конечно, и на 210м по дому полетать и даже видео снять, но это не для обычного человека, живущего не в замке.
Дохлый. Во всех смыслах дохлая тварь.
Мощности катастрофически не хватает. Без камеры на борту он еще как-то летает, с камерой — это просто непрерывная борьба за существование. Начав снижение вертикально вниз попадает в собственый спутный след и уже не может остановиться пока не брякнется об пол. При полете его постоянно трясет, случайным образом и резко закручивает — это у него то пропеллеры чиркнут по корпусу, то нежесткая рама как-нибудь интересно выгнется, то талантливо размещенный в потоке провод от аккума решит поработать рулем направления…
Рама не выдерживает нагрузок, лучи гнуться и ломаются. Пропеллеры задевают за раму. После любого, даже минимального, краша нужно смотреть — не порвалась ли рама, не запрессовались ли пропеллеры до моторов (клин), не помялась ли антенна…
А конструкция такова, что как его не урони, что-нибудь да обязаетльно попртишь. Камера и клевер ничем не защищены и ничем не закреплены. Если снять камеру — при падении вверх ногами долбится коками пропеллеров (а значит — валами моторов!) И в любом случае нормальное приземление происходит на мотогондолы и остальная тушка квадрика всем весом, включая вес аккума, со всей дури повисает на лучах.
Ну, то что рама вообще под другой размер аккума рассчитана, с которым он даже взлететь не может — это отдельная песня.
А ведь брал, чтобы зимой дома полетать… нафиг, нафиг…
1) Камера закрытая канопой и антенна НЕ клевер — это очень большое счастье и отсутствие проблем с камерой
2) Дополнительный бонус — канопа придает корпусу дополнительную жесткость.
3) А вот мощности моторов на все это счастье может и не хватить. Я ставил канопу — «голову инопланетянина», квадр начинал гораздо устойчивей вести себя в полете (жесткость), но переставал поднимать камеру…
Первые десять полётов ты учишься (на стоковой чёрной раме), потом уже получаешь фан от полётов и оттачиваешь мастерство. Потом апгрейд, что немного прибавляет ему прыти и увеличивает время работы от аккума. А потом оно надоедает, и отправляется в шкаф…
В результате камера была переставлена в JJRC H31, в него же поставил полетный контролер AIOF3_Brushed FlySky и летал FPV уже на улице… Не надоело до сих пор :-) В прошлые выходные потерял корпус — упал на внутридворовую дорожку и машина проехалась по лучу, теперь жду замену…
mysku.club/blog/china-stores/53572.html