Central UAS A350: Китайский Phantom?

- Цена: $510
- Перейти в магазин
Мультикоптеры были чем-то фантастическим, затем они стали привычными и понятными, а теперь уже становятся бытовой игрушкой и появляется множество более-менее стандартных конфигураций на разные кошельки и потребности.
И вот как раз в такой момент, как и с любой техникой, подтягиваются китайские компании — они выпускают продукт на откатанной платформе, делают его максимально дешевым и начинают максимально агрессивно завоевывать рынок. В том числе и российский.
У меня на тестировании оказалась новинка, о которой пока крайне мало информации в сети.
Называется она Central UAS A350.
Визуально квадрокоптер напоминает всем известный DJI Phantom, Walkera QR350 Pro и им подобные, но передние лучи длиннее задних и на носу символ, напоминающий лого бэтмена.

Аппарат достаточно интересный, на первый взгляд он попадает в нишу бытовой видеосъемки с воздуха и FPV полетов без претензий на гоночные характеристики, но зато с продвинутыми возможностями автоматики.
Информации, кроме общих характеристик, в инете по A350 я не нашел и решил сделать большой и подробный обзор. Включая разбор полетного контроллера, доработку и настройку.
Конкурент DJI Phantom? Проверим.
(Под катом большое количество тяжелых фотографий и видео полета)
Разберем до последнего винтика
Аппарат бывает в трех комплектациях:
Приехал коптер в невзрачной картонной коробке, внутри которой все аккуратно разложено в углубления в прозрачном блистере. Но хранить в блистере неудобно — он предназначен для нахождения внутри коробки, т.к. внешней стенки нету.


В комплекте Коптер, шасси, пульт управления, аккумулятор, зарядное устройство, пропеллеры и диск с инструкцией на китайском и промо-видео. По картинкам можно понять общий смысл манипуляций, но вот разобраться с режимами и последовательностью калибровки компаса у меня не получилось. К тому же традиционно в инструкции положение переключателей полетных режимов указано с точностью до наоборот :)
Во всех трех комплектациях аппарат с GPS и из коробки умеет зависать в точке по GPS, возвращаться домой по команде с пульта, при потере связи с пультом и экстренно самостоятельно садиться при просадке батарейки ниже определенного уровня. Но пользоваться автоматическими режимами без предварительной настройки нельзя ни в коем случае, хоть они и работают!

Качество пластика хорошее, корпус собран аж на 26 винтах. Нижняя половина из черного пластика, верхняя — белый пластик, крашенный в черный цвет. Под моторами спереди и сзади по три светодиода. Спереди постоянно горят красным. Сзади синие светодиоды мигают при включении (DISARMED) и постоянно горят в режиме ARMED.
Сверху находится большой RGB светодиод. В режиме калибровки он зеленый, в режиме поиска GPS — синий мигающий, при наличии 3D GPS Fix — постоянно горит синим.
Хвостовой киль чисто декоративный, никакой функции он не несет, внутри пустой.
Снизу у коптера выводы для подключения подвеса — вход видеопередатчика и выход питания камеры, вывод питания от полетного аккумулятора для питания подвеса и коннектор для управления подвесом по двум осям.
Шасси крепятся тремя длинными винтами.

Четыре точки для крепления подвеса к сожалению не совпадают с отверстиями на подвесе, а сзади верхняя пластина подвеса немного упирается в шасси :) Китайцы в своем репертуаре. Поэтому пришлось просверлить 2 отверстия рядом. Ничего критичного, все встало нормально.
Доработанное крепление подвеса
Скорее всего подойдут пропеллеры от фантика.
Мне досталась версия, укомплектованная аналоговой камерой в носовой части, встроенным видеопередатчиком на 5.8ГГц и 4.3" монитором со встроенным приемником, который крепится комплектным кронштейном на аппаратуру радиоуправления.
Производитель почему-то говорит о 6Мп камере, но на деле камера аналоговая (для FPV — это очень хорошо) и очень приличного качества.
Приемник монитора с завода настроен на 7й канал и об этом написано карандашом на наклейке заботливым китайцем. Канал приемника выбирается DIP переключаетелем на обратной стороне монитора. А вот канал передатчика без разбора коптера не поменять, поэтому лучше ничего не трогать — все работает прямо из коробки, монитор заряжен и достаточно его включить, чтобы увидеть картинку с борта коптера.
Картинка вполне приличная

Антенна огромная, чем оправданы такие габариты для 5.8ГГц, даже не знаю. Кронштейн алюминиевый и крепится парой винтов на ручку передатчика, а монитор навинчивается на кронштейн. Крепление монитора пластиковое.

Питается коптер от LiPo аккумулятора 3S, а вот по емкости данные расходятся. Мне достался на 3700мАч, судя по данным зарядки. Разъем питания XT60, так что можно поставить любой совместимый по размерам аккумулятор.
размер штатного 42х23х138 мм. Провода балансировочного разъема силиконовые, что очень хорошо. Аккумулятор сидит в отсеке очень плотно, свободного места по длине еле хватает, чтобы спрятать провода внутрь отсека и закрыть дверцу. По ширине запаса нет, по высоте практически нет.
В комплекте идет зарядное устройство SkyRC E3 мощностью 15W для 2S и 3S аккумуляторов. AC адаптер встроенный, подключается напрямую в 220В, ЗУ очень компактное, но за это приходится платить мощностью — 15W хватает на 3S всего на 1А зарядного тока.

Поэтому заряжаться аккум будет долго — часа 4 минимум. Зато для зарядки таким током нужен только балансный разъем. Я использую свою зарядку — Accucell 6 на 50w. Заряжаю током 5А.
Из недостатков — два уголка на краях батарейного отсека довольно острые, я о них порезался и советую пройтись наждачной бумагой или надфилем.
Батарейный отсек
Аккумулятора должно хватать минут на 15 полета, но на деле чуть меньше — видеопередатчик кушает довольно прилично (и греется тоже прилично), а FailSafe настроен так, что пытается посадить аппарат чуть ли не с третью остаточной емкости. Впрочем, это можно настроить, но китайцы ни за что не расскажут как :)
Пульт управления китайцы сделали свой, но протокол использовали спектрумовский — DSMX. Это хорошо, можно использовать передатчики Spektrum или Orange. Протокол достаточно надежный, производитель заявляет радиус действия 800-1300м на при прямой видимости на открытой местности, значит мощность передатчика скорее всего в районе 50-100мВт.
У пульта 8 каналов, но в они хитро смикшированы в 7.
Корпус пульта полноразмерный, ухватистый, держать его удобно. Это не игрушечный пульт хабсана — размером и формой очень напоминает Turnigy 9x, только чуть попроще. Сразу с завода стоят удобные анодированные регулируемые стики (копия стиков Spektrum DX6), очень удобные, пружины мягкие, управлять довольно удобно. Триммеры цифровые.
Никакого экрана нет вообще, есть кнопки выбора режима Mode1 и Mode2, кнопка переключения расходов DualRate (D/R) и кнопка Bind для связывания с приемником в коптере.

Из органов управления — два стика Rudder/Throttle и Roll/Pitch (Руль направления/ газ и Крен/Тангаж), два трехпозиционных переключателя:
правый (SW2)
левый (SW1) — должно быть управление подвесом, но на деле управляет дополнительными тремя полетными режимами
Но все режимы SW1 работают только если SW2 в положении «0». При переключении SW2 он имеет приоритет над SW1.
Также имеются два потенциометра для плавного управления подвесом: CH7 и CH8
Колесо справа от надписи i8 — муляж. Скопировано для антуража со Spektrum DX6.
Питается передатчик от 4 батареек АА или аккумулятора 2S LiPo. Внутри батарейного отсека есть разъем JST-XH, но аккумулятор положить некуда — отсек только для батареек. Можно спрятать его в корпус — места там полно.
а внутри практически ничего нет. Стики, пара плат кнопок триммеров, плата с кнопками режимов. Провода качественные, силиконовые, что удивительно, даже в дорогих пультах это редкость. Все на винтиках и разъемах, никакого термоклея. А вот качество пайки не очень. Прочно, но некрасиво.
Весь функционал пульта реализован одной крошечной черной платой — и ВЧ часть и логика и обработка кнопок и потенциометров — все на ней. На плате всего два чипа и запаяна она намертво, с обратной стороны на распределительной плате нет вообще ничего, кроме выключателя, светодиода и пищалки:
Сама плата управления и ВЧ:
ВЧ часть построена на широко известном NRF24L01
Не знаю как вам, а мне страшно управлять коптером, когда я не понимаю как он себя поведет в различных ситуациях. А для этого мне нужно знать что у него внутри, как он устроен и иметь возможность настроить его. Коптер — штука весьма сложная, поэтому возможность настройки нужна обязательно. Даже вылизанный DJI Phantom нужно иногда настраивать и подстраивать под себя. Поэтому путь у нас один — разбираем!
Полетный контроллер — это самая большая интрига. Что китайцы выбрали в качестве мозга коптера? Ведь от него зависит и функциональность и надежность и возможность настройки и качество стабилизации в ручном и автоматическом режимах.
Откручиваем 26 винтов, снимаем крышку, отсоединяем провод, идущий к светодиоду в крышке.
Сверху крышки полетника наклеена крошечная коробочка на мягкий двусторонний скотч. Разбор показывает, что это магнитометр (компас), подключенный по шине I2C. Ага! Знакомо.
Снимаем магнитометр и видим, что в качестве полетного контроллера китайцы выбрали Global Fly 3.
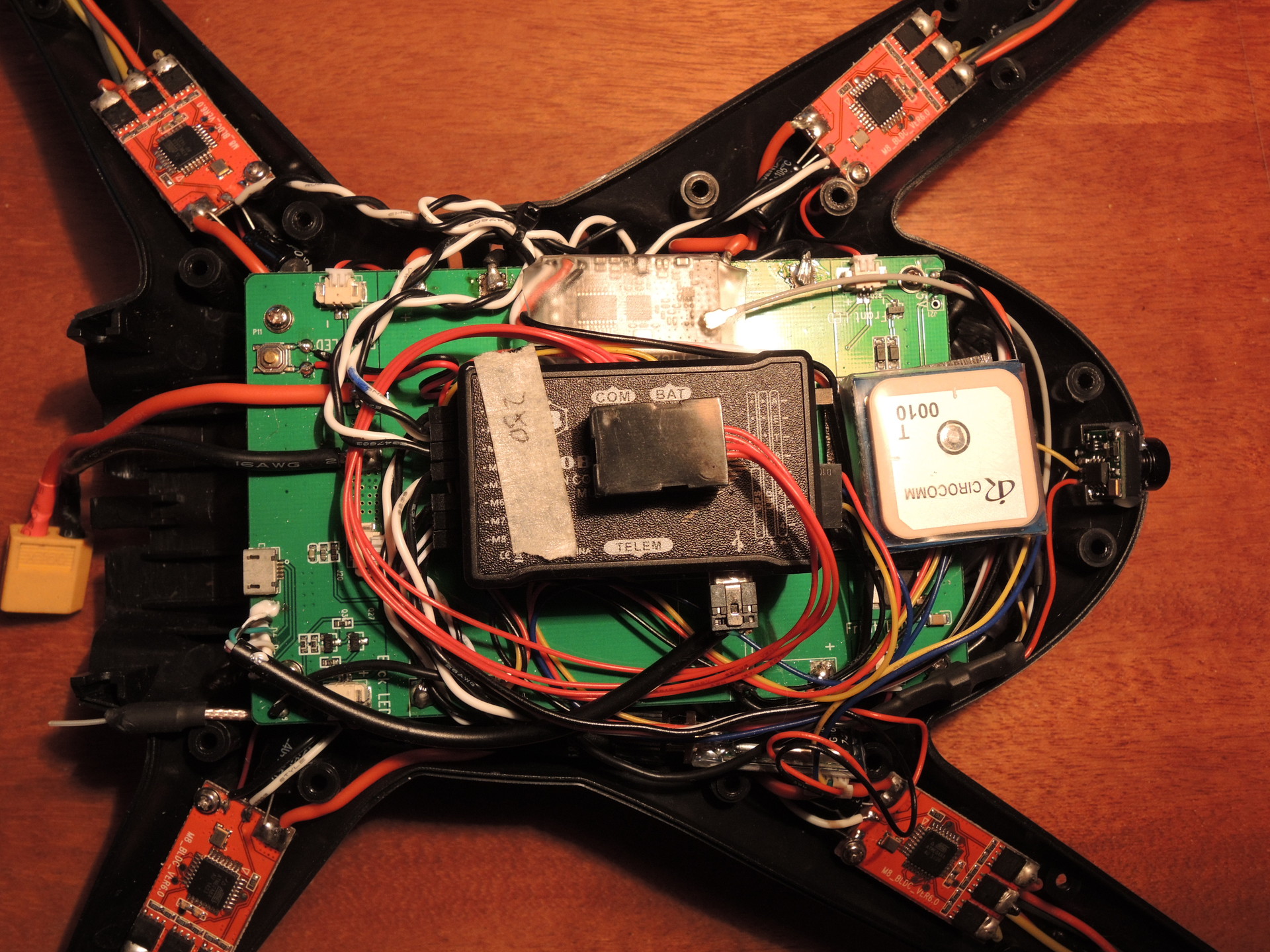
На полетнике загадочная надпись на ленте малярного скотча «250». Отклеиваем, нам не понадобится.
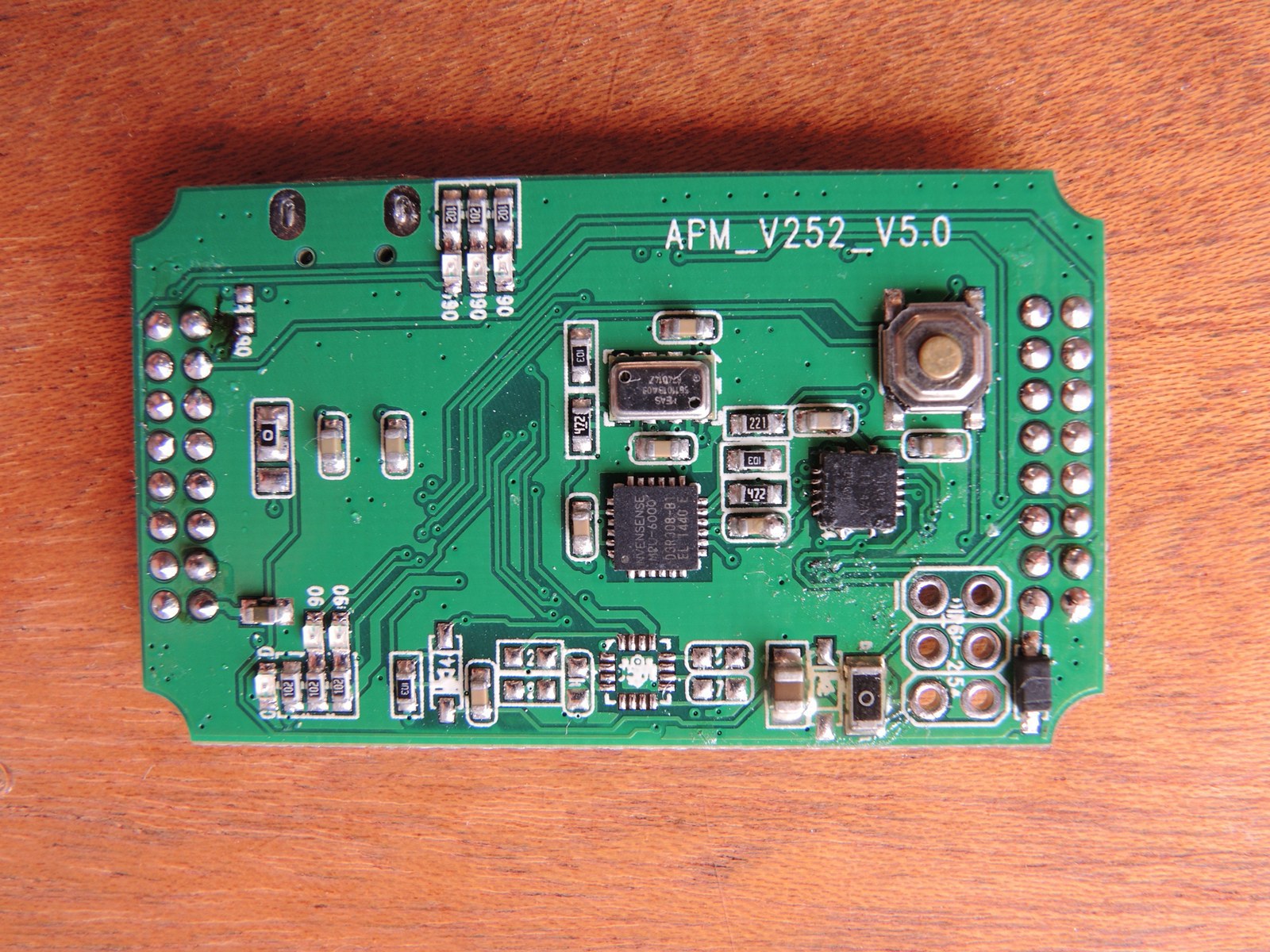
Что это? Для ответа на этот вопрос придется заглянуть под капот снова. Снимаем крышку FC (по углам 4 штифта, пока я это выяснил, два из них сломал, но это не критично, два держат достаточно жестко. Достаточно вставить отвертку в щель и аккуратно раздвинуть половинки) и видим, что это творчески переработанная китайцами версия APM 2.5.2. Версия платы 5.0.
В Ghost и Cheerson CX20 стоит точно такой же комплект версии 2.0. Соответственно, можно ожидать аналогичной работы, если компоновка окажется удачной и удастся полностью настроить автоматику. Это хорошая новость.
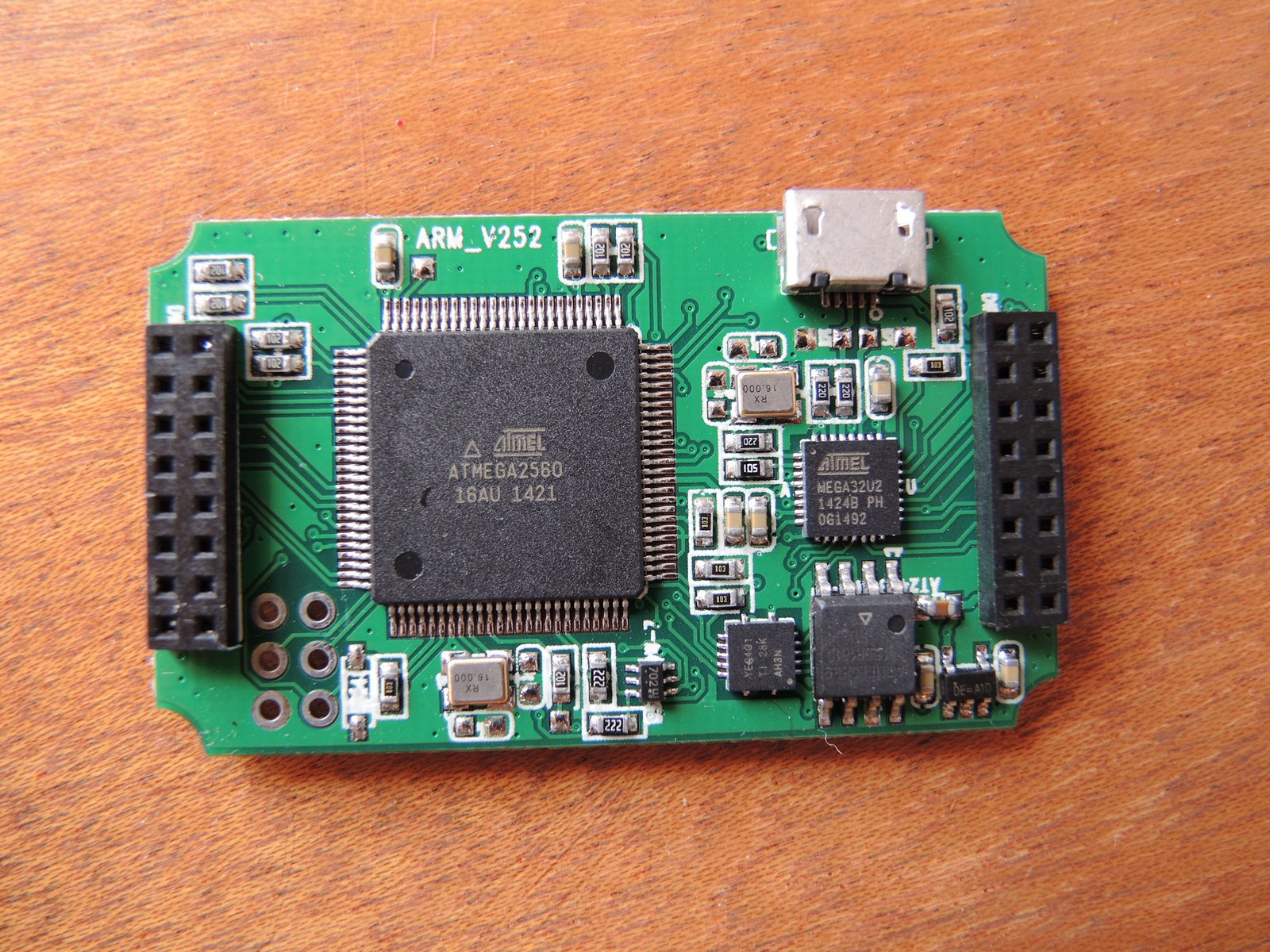
Полетный контроллер выполнен мезонином: внизу все коннекторы, кроме USB, на верхнем этаже микроконтроллер, сенсоры. Соединяются платы двумя двухрядными коннекторами.
Полетный контроллер, вид сверху
Плата коннекторов
Я было обрадовался наличию порта TELEM. Там и правда оказался UART. Но не тот. У APM2.5.2 выведен UART2 (Serial3), а здесь выведен Serial2. Телеметрия в него не выводится и подключить радиомодем пока не удалось. Ищу способ скомпилировать прошивку так, чтобы можно было подключить радиомодем 3DR через Serial2. Штатно такой функции в прошивке нету.
Но и это еще не все. Распиновка разъема телеметрии в точности зеркальная по сравнению с родным APM2.5. Хотя разъем 5-пиновый точно такой же. Если смотреть сверху, на фотографии слева направо — GND, NC, Rx, Tx, Vcc (+5V).
Регуляторы хода собственного производства, некие M8_BLDC_VER6.0, построены на Atmega8, то есть клон какого из популярных вариантов. Претензий к ним нет, работают. Но никакой влагозащиты или термоусадки. Все силовые провода силиконовые, припаяны не очень аккуратно, но припоя не жалели.
Однако, регули прикручены на винт к предусмотренному месту на луче, а не на термоклее как ожидалось. Это прогресс.
Силовая плата разработана специально для коптера — к ней коннекторами подключается подсветка на лучах, шнурком выведен USB разъем с полетного контроллера на силовую плату поближе к дверце батарейного отсека. Разведен модуль питания 5В для полетного контроллера и RC приемника. Сам приемник подключен по протоколу PPM Sum. Силовая плата также подключена с возможностью снимать значение напряжения бортовой батареи и настроен ее мониторинг полетным контроллером.
Кнопка биндинга приемника также выведена на край силовой платы, чтобы доступ к ней был без разбора корпуса коптера.
Китайцы неплохо поработали. Не сказать, чтобы продукт получился идеальный, но вполне заслуживающий внимания.
Что огорчает, это качество пайки — повсеместно оно очень невысокое. При этом сами платы изготовлены весьма неплохо, компоненты использованы тоже вполне качественные, а вот ручная работа оставляет желать лучшего — сборка не очень аккуратная, провода размещены не слишком аккуратно.
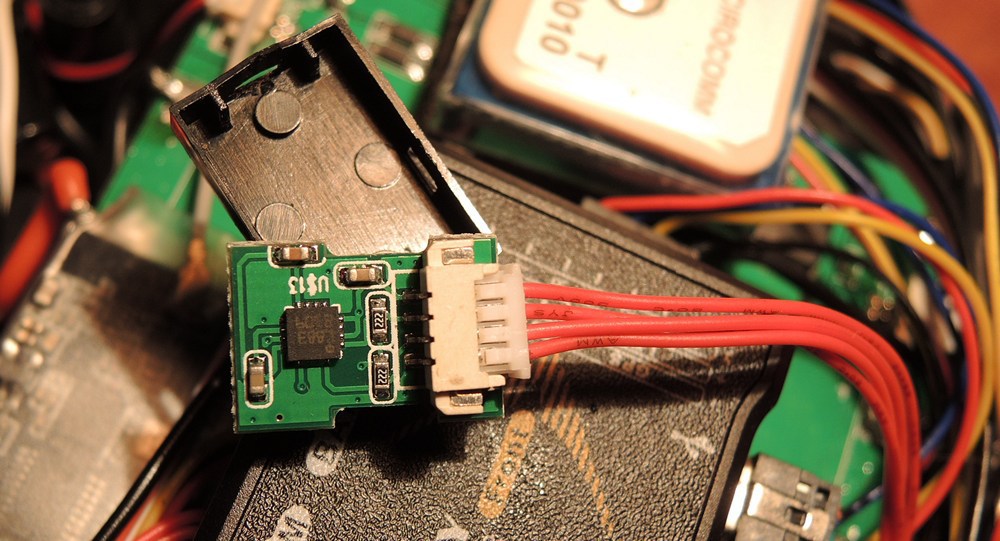
В качестве GPS приемника используется модуль BeStar BN-280. Это аналог модуля Ublox NEO-8N. Он также умеет работать с GNSS созвездиями GPS и ГЛОНАСС и поддерживает бинарный протокол обмена ubx на частоте 5Гц, который используется в APM. Модуль изначально настроен на скорость обмена 38400, выдачу данных по протоколу ubx на частоте 5Гц без информации о спутниках — то есть выдача оптимизирована. Ничего лишнего, только по делу и то, что нужно для полета.
BeStar BN-280 GPS

А вот расположен не очень удачно — на двойном слое двустороннего скотча вплотную к полетному контроллеру, а не вынесен в выпуклость корпуса, как ожидалось и рядом находится видеопередатчик, что тоже не способствует комфортной работе GPS антенны.
Камера закреплена термоклеем, подключена силиконовыми проводами, питается от BEC, который довольно прилично греется. Но картинка с нее очень неплохая.
А вот видеопередатчик вполне приличный — это 32канальный 200mW TS5823

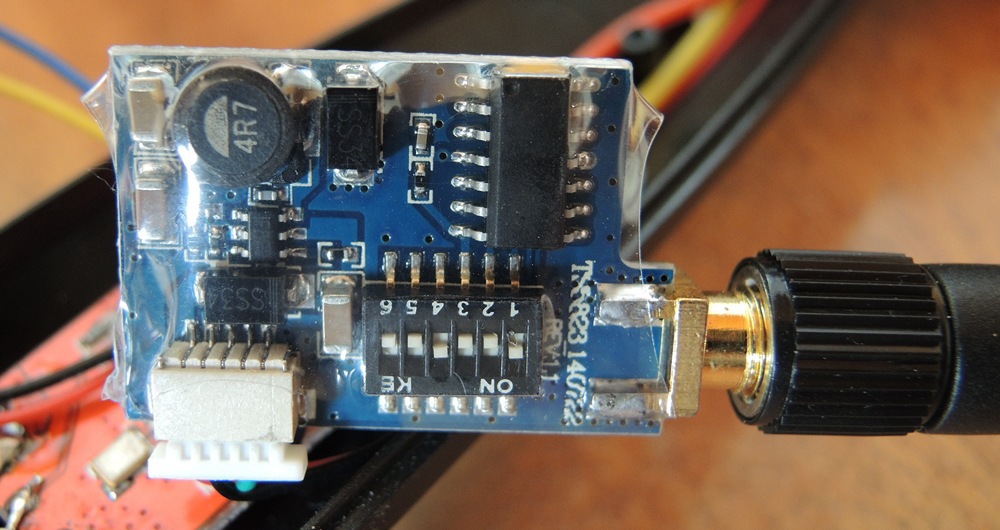
Сзади DIP переключатели выбора канала, питается передатчик от бортового аккумулятора.
Со стандартной антенны снят защитный колпачок для компактности, сама антенна размещена ближе к хвосту, хорошее решение.
А как настроишь. Любой коптер на APM требует настройки для полета в автомате. Заводская настройка выполнена неплохо:
В ручном режиме летает очень хорошо.
Но, при включении удержания GPS коптер начинает унитазить с большим радиусом и приличной скоростью, калибровка компаса ничего пока не дала. Надеюсь, удастся настроить после подключения телеметрии.
Внимание! Коптер настроен так, что при срабатывании Failsafe по напряжению, он выполняет автопосадку, но с некалиброванным компасом это превращается в бешено вращающийся коптер, который переворачивается, зацепившись шасси за траву.
Поэтому летать с некалиброванным компасом опасно!
По просьбам читателей публикую видео полета в ручном режиме и с неудачно откалиброванным компасом.
В комплекте идет двухосевой подвес YUN 2D. Механически подвес очень качественный, аккуратный, никаких проводов, датчик размещается во фрезерованном углублении, все провода спрятаны, моторы закрытые.
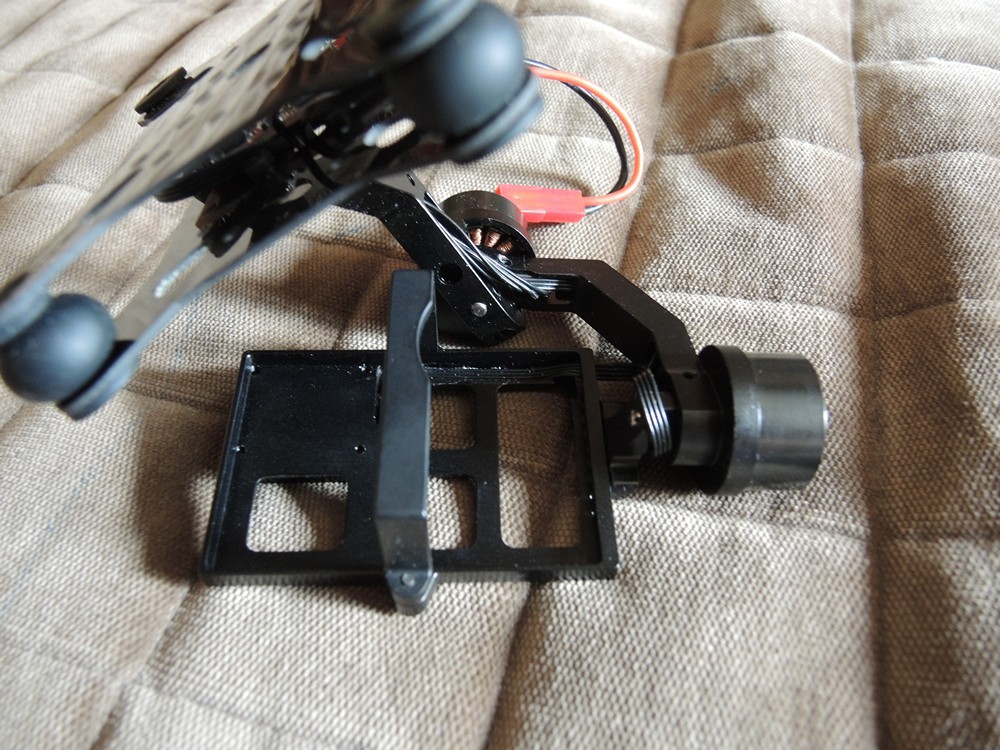
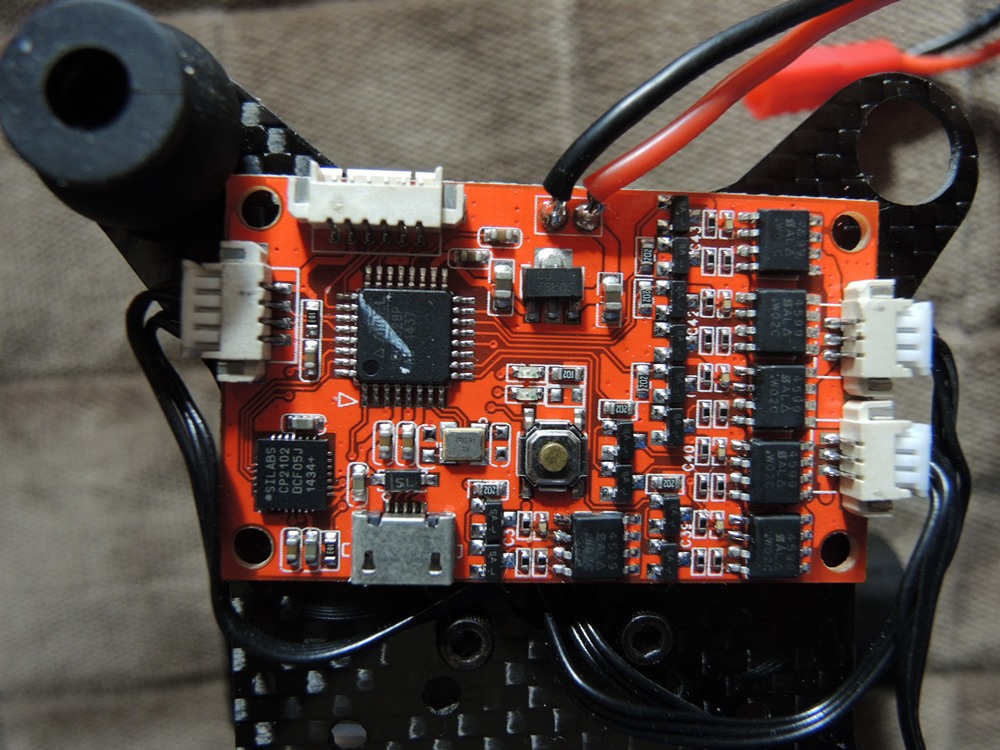
А вот плата управления — нелицензионная копия AlexMos — обновить прошивку нельзя, подключиться можно только старой версией программы настройки. Сама плата прикреплена просто на двусторонний скотч, а не винтики.
И это бы ничего, полбеды, но одна ось оказалась нерабочей — два транзистора оси ROLL пробиты, звонятся насквозь, и неизвестно, это проблема ключей или сама плата дефектная и при замене ключей они опять прогорят. Ключи греются как сумасшедшие и я буду благодарен, если кто-то подскажет как отремонтировать.
При этом, если отключить ось ROLL, PITCH стабилизируется практически идеально, нареканий нет. То есть подвес настроен хорошо и работает из коробки.
В описании сказано, что подвес подходит для GoPro или SJ4000, но реально он подходит только для GoPro. SJ4000 больше в толщину за счет встроенного экрана и ее нельзя закрепить комплектной скобой — винтики коротковаты. А найти длинные винтики М2 в продаже довольно сложно.
Тем не менее SJ4000 отлично держится за счет силы трения.
Итак, конкурент ли это DJI Phantom? C точки зрения качества и стабильности определенно нет.
А вот конкуренцию самосборному коптеру на APM или 3DR IRIS аппарат вполне может составить. он неплохо укомплектован, настроен с завода, имеет крепеж для подвеса, можно использовать для FPV полетов по камере, можно снимать неплохое видео. Если приобрести вариант без подвеса, то можно поставить ZenMuse для GoPro или любой другой 3х осевой подвес.
Аппарат уже оснащен подсветкой, что позволяет комфортно летать вечером, есть индикатор GPS фиксации и состояния ARM/DISARM.
В целом, это хороший коптер как для начинающего, так и для тех, кто хочет компактную вместительную раму, но иметь возможность залезть в мозги для настройки.
Поэтому на вопрос — стоит ли он своих денег? Я бы сказал — определенно стоит. Все компоненты модульные, заменяемые, стандартные, купить монитор получше, передатчик помощнее или другую аппаратуру, подвес для камеры проблемы не составит, если понадобится. Также коптер вполне ремонтопригоден.
Мой экземпляр отсюда
Магазинчик русифицирован, доставка в Россию бесплатная, менеджеры-китайцы, но говорят по русски.
Наверняка скоро появится и в других магазинах, но на момент заказа в инете были только анонсы.
Тем не менее основной я считаю среднюю конфигурацию: здесь и хорошая камера с видеопередатчиком и монитор со встроенным приемником и готовое крепление на аппаратуру управления и наличие режима удержания высоты и GPS и возврат домой и Simple mode.
За эти деньги собрать аналогичную платформу крайне трудно. Да и вид у нее будет не товарный.
И вот как раз в такой момент, как и с любой техникой, подтягиваются китайские компании — они выпускают продукт на откатанной платформе, делают его максимально дешевым и начинают максимально агрессивно завоевывать рынок. В том числе и российский.
У меня на тестировании оказалась новинка, о которой пока крайне мало информации в сети.
Называется она Central UAS A350.
Визуально квадрокоптер напоминает всем известный DJI Phantom, Walkera QR350 Pro и им подобные, но передние лучи длиннее задних и на носу символ, напоминающий лого бэтмена.
Аппарат достаточно интересный, на первый взгляд он попадает в нишу бытовой видеосъемки с воздуха и FPV полетов без претензий на гоночные характеристики, но зато с продвинутыми возможностями автоматики.
Информации, кроме общих характеристик, в инете по A350 я не нашел и решил сделать большой и подробный обзор. Включая разбор полетного контроллера, доработку и настройку.
Конкурент DJI Phantom? Проверим.
(Под катом большое количество тяжелых фотографий и видео полета)
Разберем до последнего винтика
Аппарат бывает в трех комплектациях:
- Стандартная (~ $315)
- FPV (~ $413)
- с 2D подвесом для GoPro (~ $510)
Приехал коптер в невзрачной картонной коробке, внутри которой все аккуратно разложено в углубления в прозрачном блистере. Но хранить в блистере неудобно — он предназначен для нахождения внутри коробки, т.к. внешней стенки нету.
В блистере
В комплекте Коптер, шасси, пульт управления, аккумулятор, зарядное устройство, пропеллеры и диск с инструкцией на китайском и промо-видео. По картинкам можно понять общий смысл манипуляций, но вот разобраться с режимами и последовательностью калибровки компаса у меня не получилось. К тому же традиционно в инструкции положение переключателей полетных режимов указано с точностью до наоборот :)
Во всех трех комплектациях аппарат с GPS и из коробки умеет зависать в точке по GPS, возвращаться домой по команде с пульта, при потере связи с пультом и экстренно самостоятельно садиться при просадке батарейки ниже определенного уровня. Но пользоваться автоматическими режимами без предварительной настройки нельзя ни в коем случае, хоть они и работают!
Корпус и качество сборки
Качество пластика хорошее, корпус собран аж на 26 винтах. Нижняя половина из черного пластика, верхняя — белый пластик, крашенный в черный цвет. Под моторами спереди и сзади по три светодиода. Спереди постоянно горят красным. Сзади синие светодиоды мигают при включении (DISARMED) и постоянно горят в режиме ARMED.
Сверху находится большой RGB светодиод. В режиме калибровки он зеленый, в режиме поиска GPS — синий мигающий, при наличии 3D GPS Fix — постоянно горит синим.
Хвостовой киль чисто декоративный, никакой функции он не несет, внутри пустой.
Снизу у коптера выводы для подключения подвеса — вход видеопередатчика и выход питания камеры, вывод питания от полетного аккумулятора для питания подвеса и коннектор для управления подвесом по двум осям.
Шасси крепятся тремя длинными винтами.
Четыре точки для крепления подвеса к сожалению не совпадают с отверстиями на подвесе, а сзади верхняя пластина подвеса немного упирается в шасси :) Китайцы в своем репертуаре. Поэтому пришлось просверлить 2 отверстия рядом. Ничего критичного, все встало нормально.
Доработанное крепление подвеса
ВМГ
Винтомоторная группа до степени смешения похожа на Phantom — моторы без опознавательных знаков, пропеллеры 24см (~9.5") с самозатягивающейся резьбой. Пропеллеры попарно отмечены черным и серебристым колпачком — затягивать их нет нужды, в направлении вращения они затягиваются сами при работе моторов. Это очень удобно — не нужны инструменты для снятия и установки пропеллеров, можно снимать их для транспортировки меньше чем за минуту и так же быстро поставить на место. Пластик довольно гибкий, прочный, не хрупкий.Скорее всего подойдут пропеллеры от фантика.
FPV возможности
Мне досталась версия, укомплектованная аналоговой камерой в носовой части, встроенным видеопередатчиком на 5.8ГГц и 4.3" монитором со встроенным приемником, который крепится комплектным кронштейном на аппаратуру радиоуправления.
Производитель почему-то говорит о 6Мп камере, но на деле камера аналоговая (для FPV — это очень хорошо) и очень приличного качества.
Приемник монитора с завода настроен на 7й канал и об этом написано карандашом на наклейке заботливым китайцем. Канал приемника выбирается DIP переключаетелем на обратной стороне монитора. А вот канал передатчика без разбора коптера не поменять, поэтому лучше ничего не трогать — все работает прямо из коробки, монитор заряжен и достаточно его включить, чтобы увидеть картинку с борта коптера.
Картинка вполне приличная
Антенна огромная, чем оправданы такие габариты для 5.8ГГц, даже не знаю. Кронштейн алюминиевый и крепится парой винтов на ручку передатчика, а монитор навинчивается на кронштейн. Крепление монитора пластиковое.
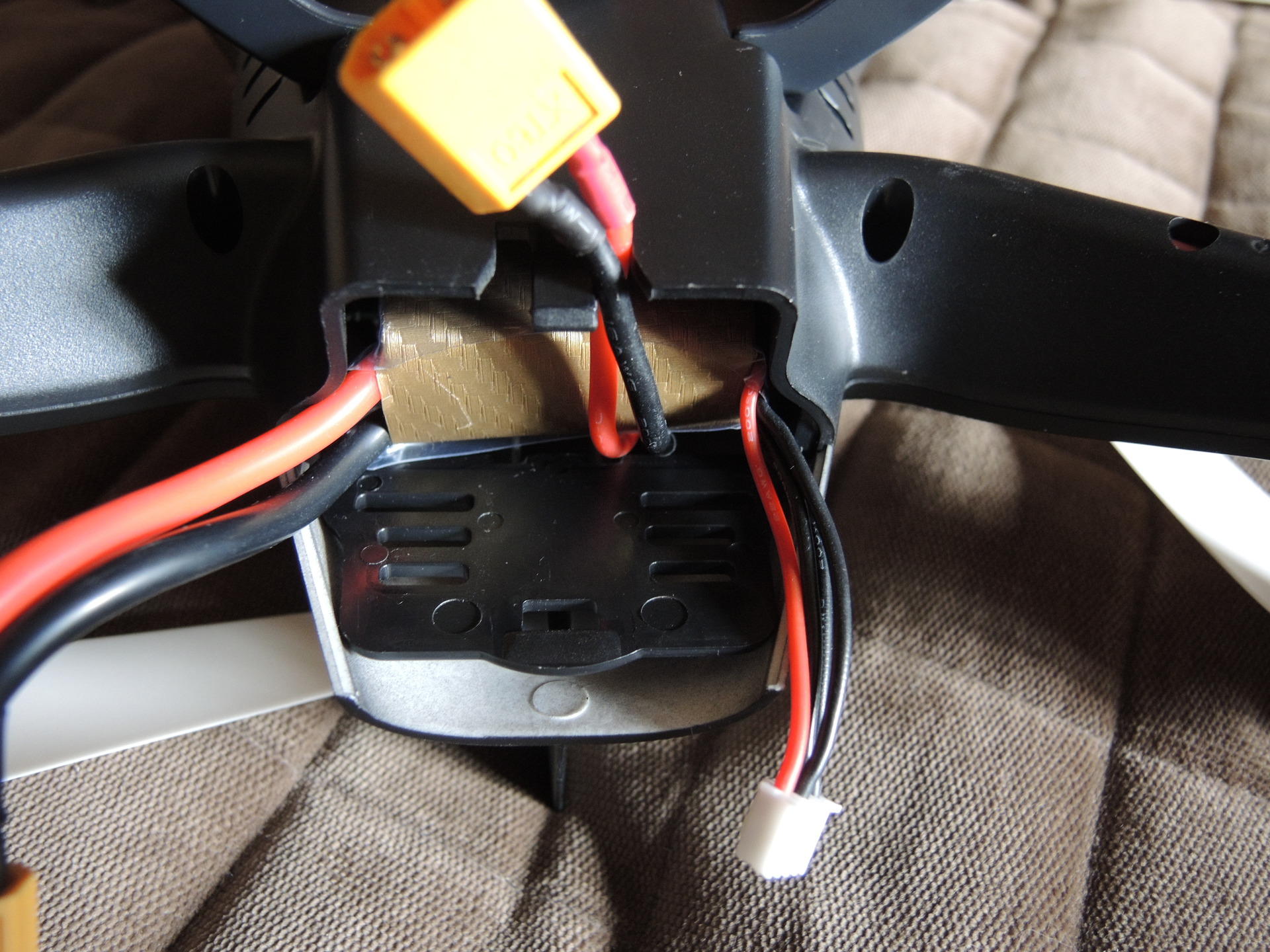
Питание
Питается коптер от LiPo аккумулятора 3S, а вот по емкости данные расходятся. Мне достался на 3700мАч, судя по данным зарядки. Разъем питания XT60, так что можно поставить любой совместимый по размерам аккумулятор.
размер штатного 42х23х138 мм. Провода балансировочного разъема силиконовые, что очень хорошо. Аккумулятор сидит в отсеке очень плотно, свободного места по длине еле хватает, чтобы спрятать провода внутрь отсека и закрыть дверцу. По ширине запаса нет, по высоте практически нет.
В комплекте идет зарядное устройство SkyRC E3 мощностью 15W для 2S и 3S аккумуляторов. AC адаптер встроенный, подключается напрямую в 220В, ЗУ очень компактное, но за это приходится платить мощностью — 15W хватает на 3S всего на 1А зарядного тока.
Поэтому заряжаться аккум будет долго — часа 4 минимум. Зато для зарядки таким током нужен только балансный разъем. Я использую свою зарядку — Accucell 6 на 50w. Заряжаю током 5А.
Из недостатков — два уголка на краях батарейного отсека довольно острые, я о них порезался и советую пройтись наждачной бумагой или надфилем.
Батарейный отсек
Аккумулятора должно хватать минут на 15 полета, но на деле чуть меньше — видеопередатчик кушает довольно прилично (и греется тоже прилично), а FailSafe настроен так, что пытается посадить аппарат чуть ли не с третью остаточной емкости. Впрочем, это можно настроить, но китайцы ни за что не расскажут как :)
Пульт управления (RC Tx)
Пульт управления китайцы сделали свой, но протокол использовали спектрумовский — DSMX. Это хорошо, можно использовать передатчики Spektrum или Orange. Протокол достаточно надежный, производитель заявляет радиус действия 800-1300м на при прямой видимости на открытой местности, значит мощность передатчика скорее всего в районе 50-100мВт.
У пульта 8 каналов, но в они хитро смикшированы в 7.
Корпус пульта полноразмерный, ухватистый, держать его удобно. Это не игрушечный пульт хабсана — размером и формой очень напоминает Turnigy 9x, только чуть попроще. Сразу с завода стоят удобные анодированные регулируемые стики (копия стиков Spektrum DX6), очень удобные, пружины мягкие, управлять довольно удобно. Триммеры цифровые.
Никакого экрана нет вообще, есть кнопки выбора режима Mode1 и Mode2, кнопка переключения расходов DualRate (D/R) и кнопка Bind для связывания с приемником в коптере.
Процедура связывания приемника и передатчика
Процедура довольно замысловатая.
Находим пальцем в батарейном отсеке коптера сверху слева на плате крошечную кнопку, нажимаем и, удерживая ее, подключаем аккумулятор.
Затем зажимаем кнопку Bind на пульте и включаем его. Ждем пока перестанет пищать. Выключаем коптер, выключаем пульт. Включаем все в обычном порядке — сначала пульт, затем питание коптера.
Находим пальцем в батарейном отсеке коптера сверху слева на плате крошечную кнопку, нажимаем и, удерживая ее, подключаем аккумулятор.
Затем зажимаем кнопку Bind на пульте и включаем его. Ждем пока перестанет пищать. Выключаем коптер, выключаем пульт. Включаем все в обычном порядке — сначала пульт, затем питание коптера.
правый (SW2)
- в положении 0 — режим Stabilize
- в положении 1 — режим GPS Hold — удержание позиции в 3D
- в положении 2 — RTL (Return To Launch — возврат домой)
левый (SW1) — должно быть управление подвесом, но на деле управляет дополнительными тремя полетными режимами
- в положении 0 — режим Stabilize
- в положении 1 — режим Alt Hold — удержание высоты
- в положении 2 — Stabilize + Simple mode — режим стабилизации с CareFree — фиксация
Но все режимы SW1 работают только если SW2 в положении «0». При переключении SW2 он имеет приоритет над SW1.
Также имеются два потенциометра для плавного управления подвесом: CH7 и CH8
Колесо справа от надписи i8 — муляж. Скопировано для антуража со Spektrum DX6.
Питается передатчик от 4 батареек АА или аккумулятора 2S LiPo. Внутри батарейного отсека есть разъем JST-XH, но аккумулятор положить некуда — отсек только для батареек. Можно спрятать его в корпус — места там полно.
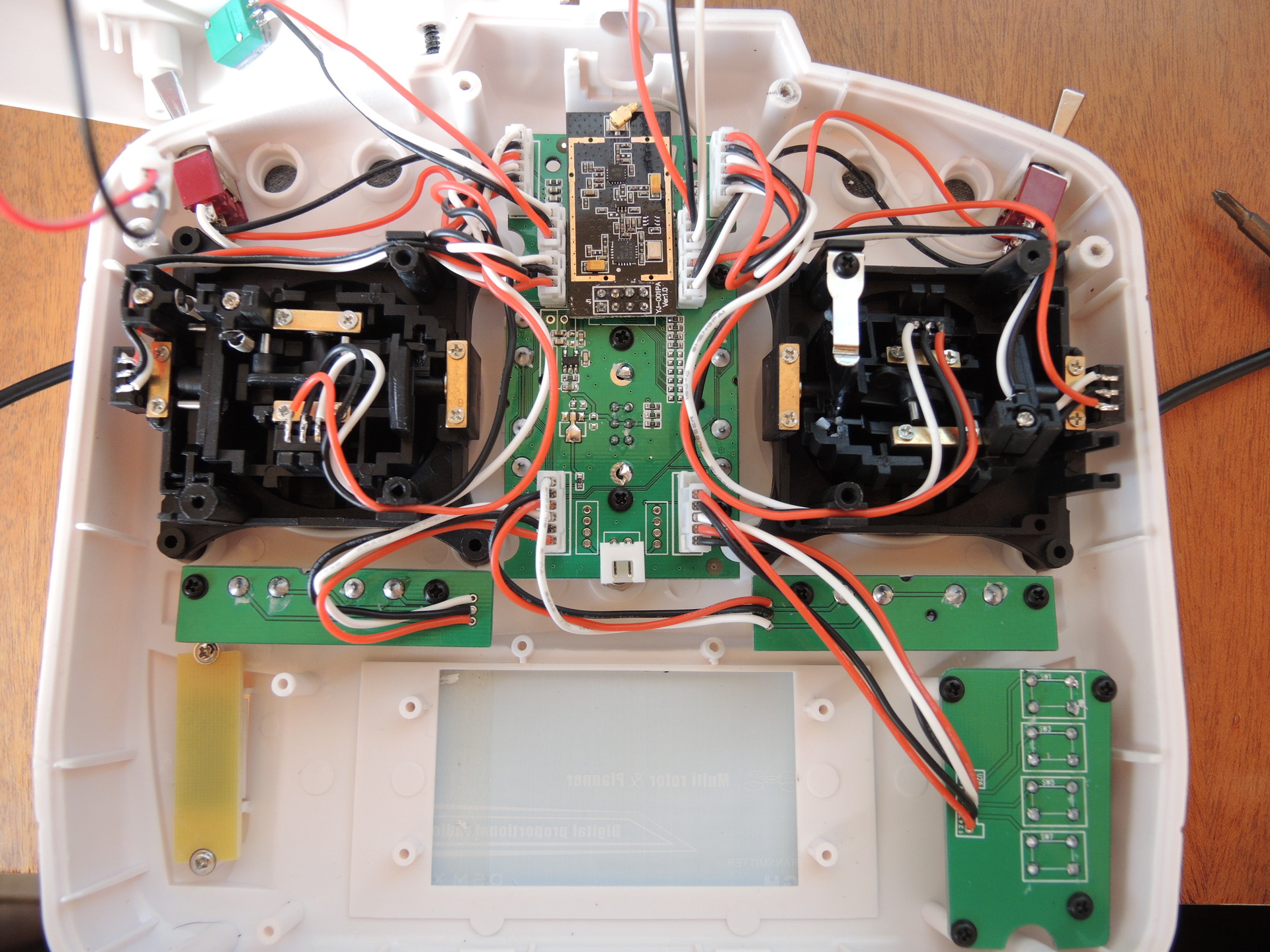
А что внутри пульта?
а внутри практически ничего нет. Стики, пара плат кнопок триммеров, плата с кнопками режимов. Провода качественные, силиконовые, что удивительно, даже в дорогих пультах это редкость. Все на винтиках и разъемах, никакого термоклея. А вот качество пайки не очень. Прочно, но некрасиво.
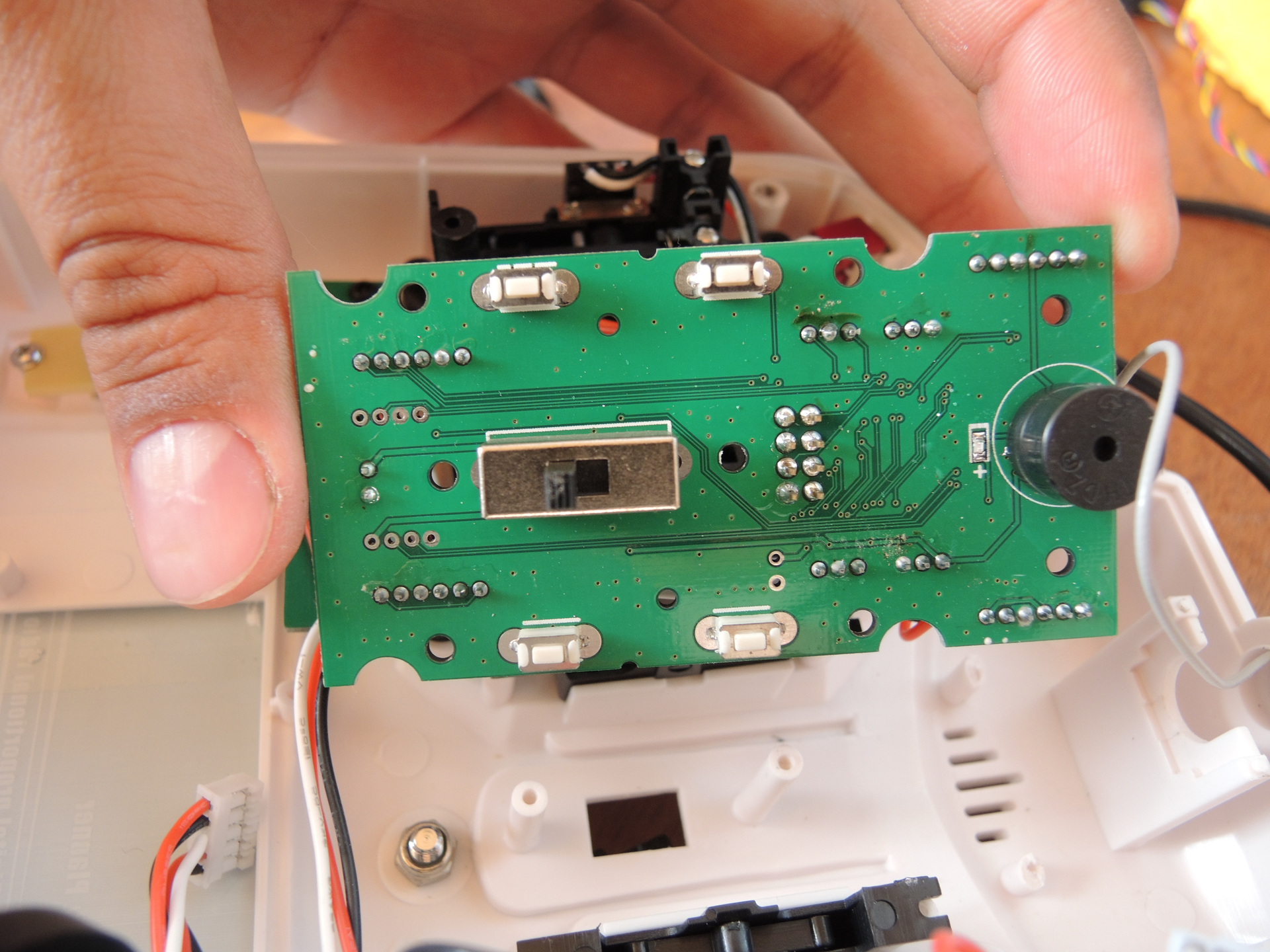
Весь функционал пульта реализован одной крошечной черной платой — и ВЧ часть и логика и обработка кнопок и потенциометров — все на ней. На плате всего два чипа и запаяна она намертво, с обратной стороны на распределительной плате нет вообще ничего, кроме выключателя, светодиода и пищалки:
Сама плата управления и ВЧ:
ВЧ часть построена на широко известном NRF24L01
Начинка коптера
Не знаю как вам, а мне страшно управлять коптером, когда я не понимаю как он себя поведет в различных ситуациях. А для этого мне нужно знать что у него внутри, как он устроен и иметь возможность настроить его. Коптер — штука весьма сложная, поэтому возможность настройки нужна обязательно. Даже вылизанный DJI Phantom нужно иногда настраивать и подстраивать под себя. Поэтому путь у нас один — разбираем!
Полетный контроллер (FC)
Полетный контроллер — это самая большая интрига. Что китайцы выбрали в качестве мозга коптера? Ведь от него зависит и функциональность и надежность и возможность настройки и качество стабилизации в ручном и автоматическом режимах.
Откручиваем 26 винтов, снимаем крышку, отсоединяем провод, идущий к светодиоду в крышке.
Сверху крышки полетника наклеена крошечная коробочка на мягкий двусторонний скотч. Разбор показывает, что это магнитометр (компас), подключенный по шине I2C. Ага! Знакомо.
Выносной модуль магнитометра
Снимаем магнитометр и видим, что в качестве полетного контроллера китайцы выбрали Global Fly 3.
На полетнике загадочная надпись на ленте малярного скотча «250». Отклеиваем, нам не понадобится.
Что это? Для ответа на этот вопрос придется заглянуть под капот снова. Снимаем крышку FC (по углам 4 штифта, пока я это выяснил, два из них сломал, но это не критично, два держат достаточно жестко. Достаточно вставить отвертку в щель и аккуратно раздвинуть половинки) и видим, что это творчески переработанная китайцами версия APM 2.5.2. Версия платы 5.0.
В Ghost и Cheerson CX20 стоит точно такой же комплект версии 2.0. Соответственно, можно ожидать аналогичной работы, если компоновка окажется удачной и удастся полностью настроить автоматику. Это хорошая новость.
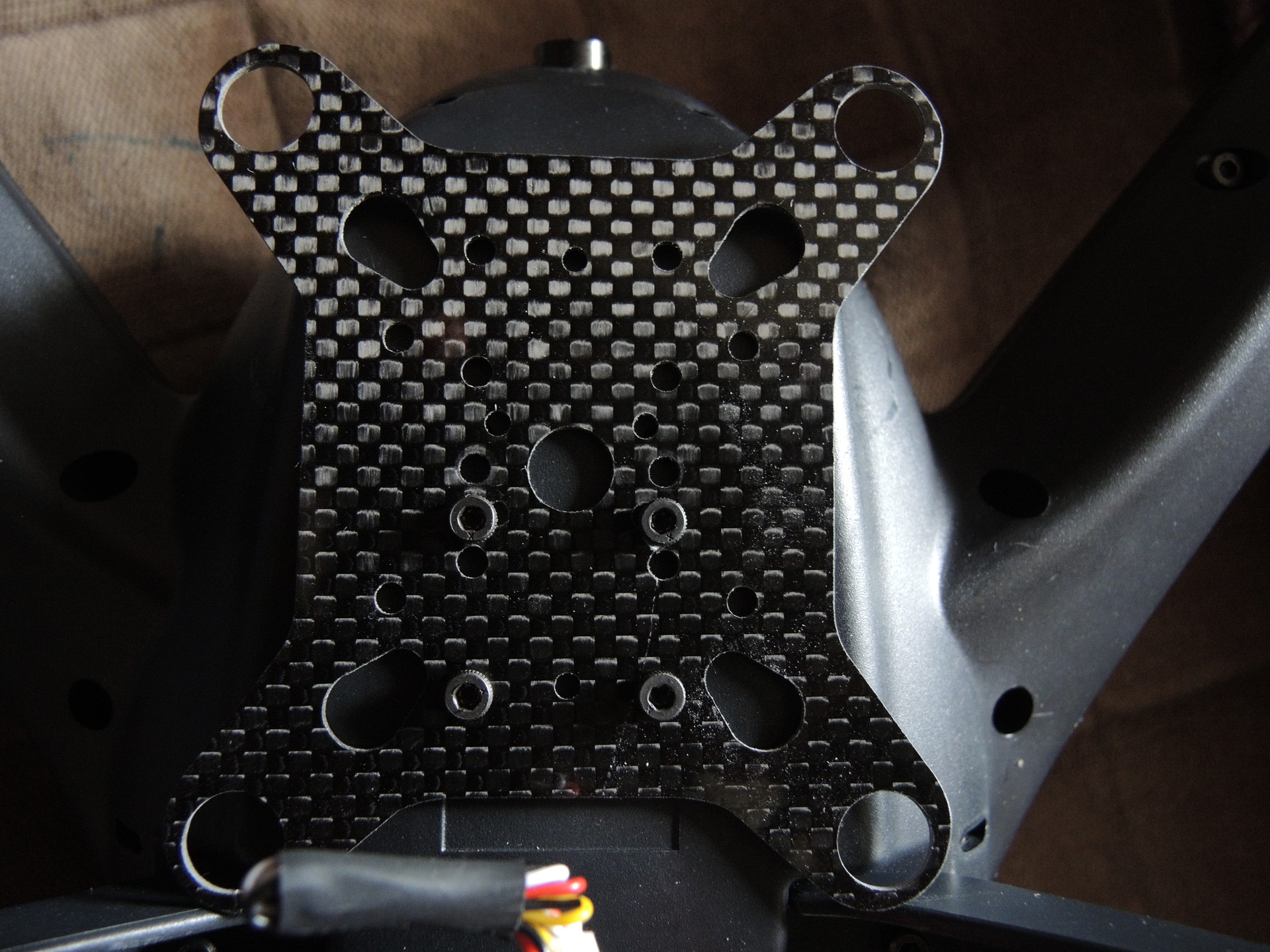
Разбираем полетный контроллер
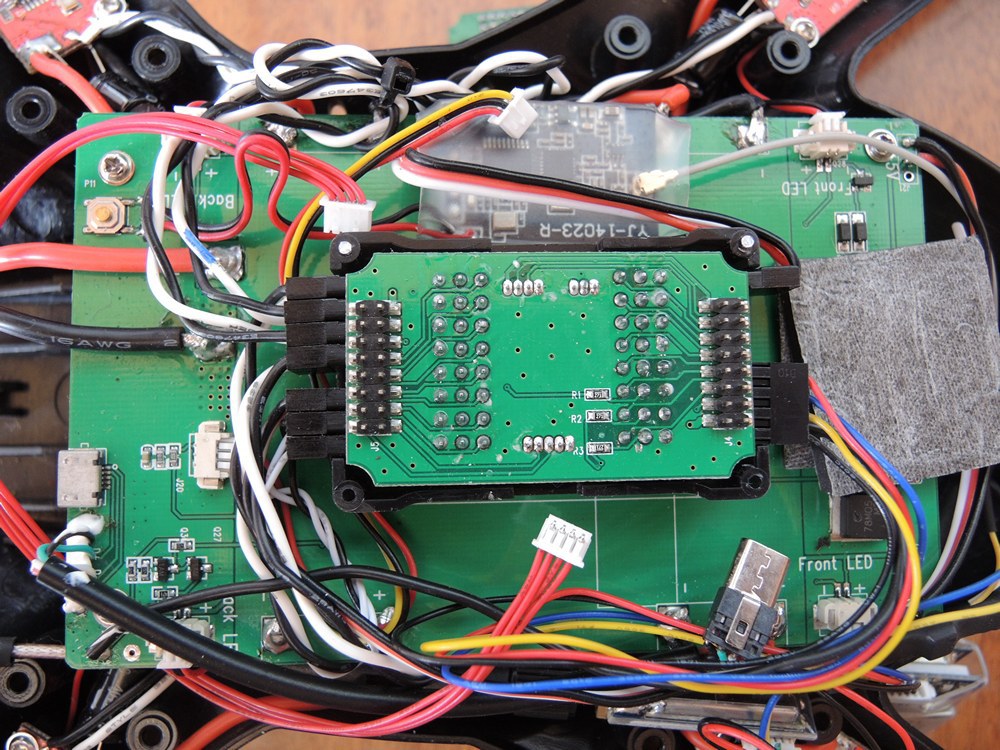
Полетный контроллер выполнен мезонином: внизу все коннекторы, кроме USB, на верхнем этаже микроконтроллер, сенсоры. Соединяются платы двумя двухрядными коннекторами.
Фотографии полетного контроллера изнутри
Полетный контроллер, вид сверху
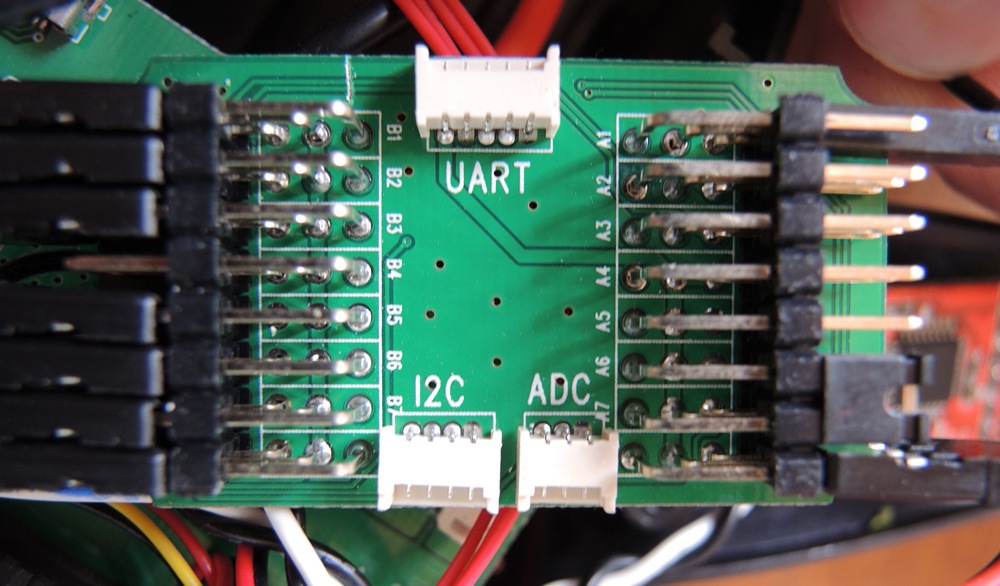
Плата коннекторов
Я было обрадовался наличию порта TELEM. Там и правда оказался UART. Но не тот. У APM2.5.2 выведен UART2 (Serial3), а здесь выведен Serial2. Телеметрия в него не выводится и подключить радиомодем пока не удалось. Ищу способ скомпилировать прошивку так, чтобы можно было подключить радиомодем 3DR через Serial2. Штатно такой функции в прошивке нету.
Но и это еще не все. Распиновка разъема телеметрии в точности зеркальная по сравнению с родным APM2.5. Хотя разъем 5-пиновый точно такой же. Если смотреть сверху, на фотографии слева направо — GND, NC, Rx, Tx, Vcc (+5V).
Регуляторы хода (ESC)
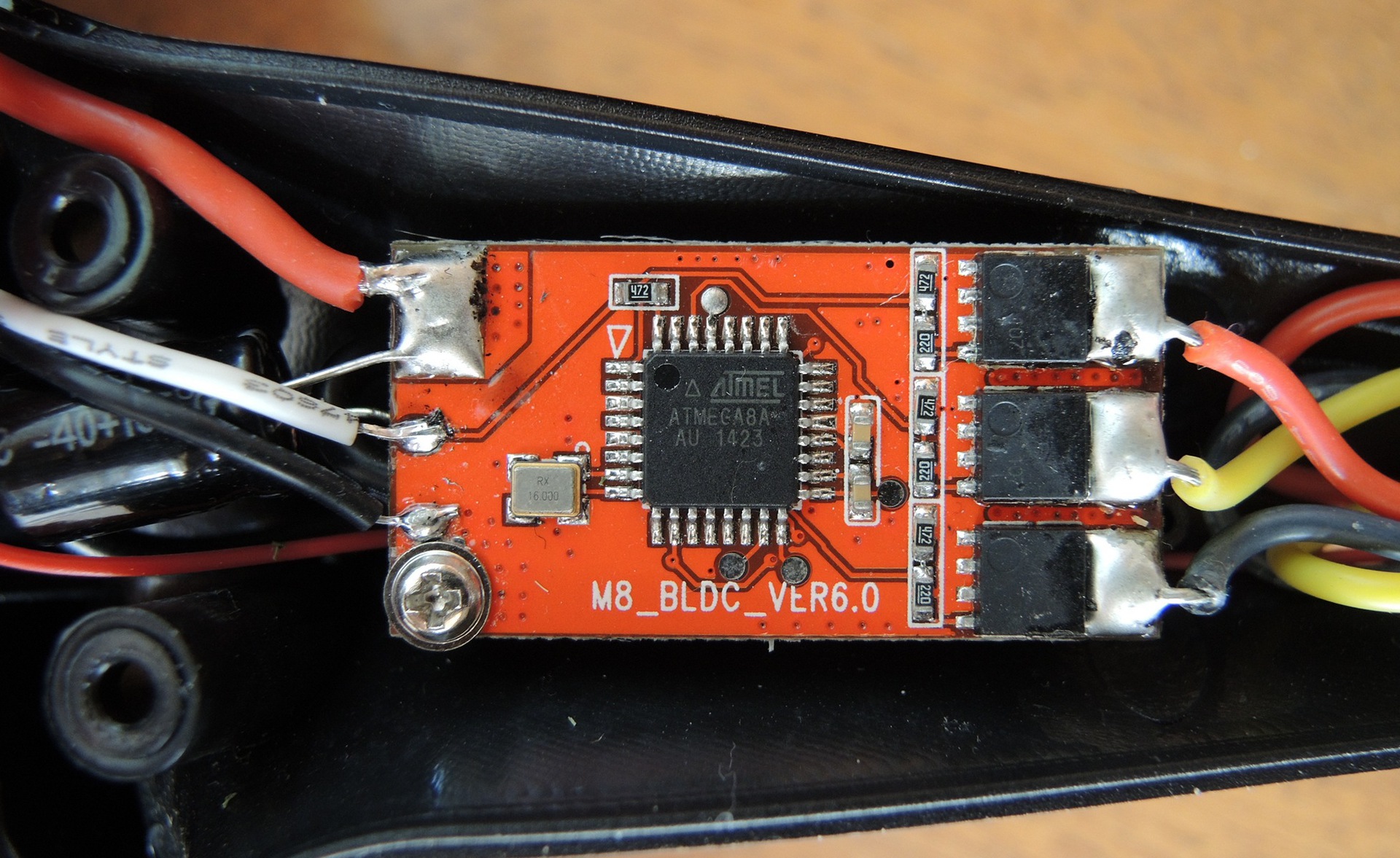
Регуляторы хода собственного производства, некие M8_BLDC_VER6.0, построены на Atmega8, то есть клон какого из популярных вариантов. Претензий к ним нет, работают. Но никакой влагозащиты или термоусадки. Все силовые провода силиконовые, припаяны не очень аккуратно, но припоя не жалели.
Однако, регули прикручены на винт к предусмотренному месту на луче, а не на термоклее как ожидалось. Это прогресс.
Немного фотографий ESC
Силовая плата разработана специально для коптера — к ней коннекторами подключается подсветка на лучах, шнурком выведен USB разъем с полетного контроллера на силовую плату поближе к дверце батарейного отсека. Разведен модуль питания 5В для полетного контроллера и RC приемника. Сам приемник подключен по протоколу PPM Sum. Силовая плата также подключена с возможностью снимать значение напряжения бортовой батареи и настроен ее мониторинг полетным контроллером.
Кнопка биндинга приемника также выведена на край силовой платы, чтобы доступ к ней был без разбора корпуса коптера.
Китайцы неплохо поработали. Не сказать, чтобы продукт получился идеальный, но вполне заслуживающий внимания.
Что огорчает, это качество пайки — повсеместно оно очень невысокое. При этом сами платы изготовлены весьма неплохо, компоненты использованы тоже вполне качественные, а вот ручная работа оставляет желать лучшего — сборка не очень аккуратная, провода размещены не слишком аккуратно.
GPS модуль
В качестве GPS приемника используется модуль BeStar BN-280. Это аналог модуля Ublox NEO-8N. Он также умеет работать с GNSS созвездиями GPS и ГЛОНАСС и поддерживает бинарный протокол обмена ubx на частоте 5Гц, который используется в APM. Модуль изначально настроен на скорость обмена 38400, выдачу данных по протоколу ubx на частоте 5Гц без информации о спутниках — то есть выдача оптимизирована. Ничего лишнего, только по делу и то, что нужно для полета.
BeStar BN-280 GPS
А вот расположен не очень удачно — на двойном слое двустороннего скотча вплотную к полетному контроллеру, а не вынесен в выпуклость корпуса, как ожидалось и рядом находится видеопередатчик, что тоже не способствует комфортной работе GPS антенны.
Камера и передатчик
Камера закреплена термоклеем, подключена силиконовыми проводами, питается от BEC, который довольно прилично греется. Но картинка с нее очень неплохая.
А вот видеопередатчик вполне приличный — это 32канальный 200mW TS5823
Сзади DIP переключатели выбора канала, питается передатчик от бортового аккумулятора.
Со стандартной антенны снят защитный колпачок для компактности, сама антенна размещена ближе к хвосту, хорошее решение.
Как летает?
А как настроишь. Любой коптер на APM требует настройки для полета в автомате. Заводская настройка выполнена неплохо:
- Акселерометр скалиброван сносно и аппарат неплохо держит горизонт,
- регулятор хода скалиброваны
- аппаратура скалибрована и настроена.
В ручном режиме летает очень хорошо.
Но, при включении удержания GPS коптер начинает унитазить с большим радиусом и приличной скоростью, калибровка компаса ничего пока не дала. Надеюсь, удастся настроить после подключения телеметрии.
Внимание! Коптер настроен так, что при срабатывании Failsafe по напряжению, он выполняет автопосадку, но с некалиброванным компасом это превращается в бешено вращающийся коптер, который переворачивается, зацепившись шасси за траву.
Поэтому летать с некалиброванным компасом опасно!
Как калибровать магнитометр (компас)?
Выходим в чистое поле. Выгружаем все металлические предметы из карманов (ключи, монеты, телефон).
Включаем коптер с выключенным передатчиком и быстро, в течение 4-5 секунд включаем передатчик, предварительно опустив правый стик в правый нижний угол (для Mode2). Коптер отпищится и верхний светодиод будет гореть зеленым. Берем коптер в руки, и вращаем его 1-3 оборота по часовой стрелке перед собой, затем поворачиваем его пузом вверх, повторяем 1-3 оборота, правым боком вверх, левым боком вверх, носом и хвостом вверх и в каждом положении делаем 1-3 оборота по часовой стрелке перед собой. Процедура не должна занимать меньше 1 и больше 5 минут. Затем выключаем питание коптера и снова включаем его. Готово.
Включаем коптер с выключенным передатчиком и быстро, в течение 4-5 секунд включаем передатчик, предварительно опустив правый стик в правый нижний угол (для Mode2). Коптер отпищится и верхний светодиод будет гореть зеленым. Берем коптер в руки, и вращаем его 1-3 оборота по часовой стрелке перед собой, затем поворачиваем его пузом вверх, повторяем 1-3 оборота, правым боком вверх, левым боком вверх, носом и хвостом вверх и в каждом положении делаем 1-3 оборота по часовой стрелке перед собой. Процедура не должна занимать меньше 1 и больше 5 минут. Затем выключаем питание коптера и снова включаем его. Готово.
По просьбам читателей публикую видео полета в ручном режиме и с неудачно откалиброванным компасом.
Подвес для GoPro
В комплекте идет двухосевой подвес YUN 2D. Механически подвес очень качественный, аккуратный, никаких проводов, датчик размещается во фрезерованном углублении, все провода спрятаны, моторы закрытые.
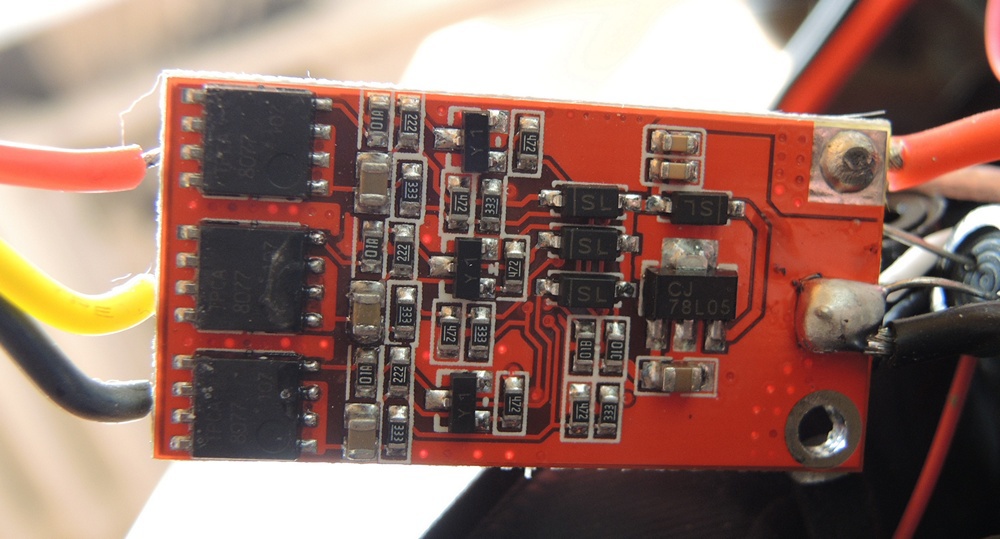
А вот плата управления — нелицензионная копия AlexMos — обновить прошивку нельзя, подключиться можно только старой версией программы настройки. Сама плата прикреплена просто на двусторонний скотч, а не винтики.
И это бы ничего, полбеды, но одна ось оказалась нерабочей — два транзистора оси ROLL пробиты, звонятся насквозь, и неизвестно, это проблема ключей или сама плата дефектная и при замене ключей они опять прогорят. Ключи греются как сумасшедшие и я буду благодарен, если кто-то подскажет как отремонтировать.
Плата подвеса
При этом, если отключить ось ROLL, PITCH стабилизируется практически идеально, нареканий нет. То есть подвес настроен хорошо и работает из коробки.
В описании сказано, что подвес подходит для GoPro или SJ4000, но реально он подходит только для GoPro. SJ4000 больше в толщину за счет встроенного экрана и ее нельзя закрепить комплектной скобой — винтики коротковаты. А найти длинные винтики М2 в продаже довольно сложно.
Тем не менее SJ4000 отлично держится за счет силы трения.
Выводы
Итак, конкурент ли это DJI Phantom? C точки зрения качества и стабильности определенно нет.
А вот конкуренцию самосборному коптеру на APM или 3DR IRIS аппарат вполне может составить. он неплохо укомплектован, настроен с завода, имеет крепеж для подвеса, можно использовать для FPV полетов по камере, можно снимать неплохое видео. Если приобрести вариант без подвеса, то можно поставить ZenMuse для GoPro или любой другой 3х осевой подвес.
Аппарат уже оснащен подсветкой, что позволяет комфортно летать вечером, есть индикатор GPS фиксации и состояния ARM/DISARM.
В целом, это хороший коптер как для начинающего, так и для тех, кто хочет компактную вместительную раму, но иметь возможность залезть в мозги для настройки.
Поэтому на вопрос — стоит ли он своих денег? Я бы сказал — определенно стоит. Все компоненты модульные, заменяемые, стандартные, купить монитор получше, передатчик помощнее или другую аппаратуру, подвес для камеры проблемы не составит, если понадобится. Также коптер вполне ремонтопригоден.
Где купить?
Мой экземпляр отсюда
Магазинчик русифицирован, доставка в Россию бесплатная, менеджеры-китайцы, но говорят по русски.
Наверняка скоро появится и в других магазинах, но на момент заказа в инете были только анонсы.
Тем не менее основной я считаю среднюю конфигурацию: здесь и хорошая камера с видеопередатчиком и монитор со встроенным приемником и готовое крепление на аппаратуру управления и наличие режима удержания высоты и GPS и возврат домой и Simple mode.
За эти деньги собрать аналогичную платформу крайне трудно. Да и вид у нее будет не товарный.
Самые обсуждаемые обзоры
| +36 |
2115
57
|
Что по самому обзору, то он плох, совсем плох, не показал самого главного, как летает это чудо.
Тут вообще не показана работа самого товара, работа с камерой. Куда магазин глядел когда давал ему товар?
Как летает это чудо могу показать, видео я снимал специально, но поскольку магнитометр чудил, то в автоматическом режиме смотреть особо нечего, а в ручном летает очень хорошо — я управлял коптером в тесной комнате безо всяких проблем. С другими коптерами в комнате становится тесно и страшно.
Если да, то это тестирование, если нет, то плата за обзор — товар. Причем большая плата за слабый обзор.
Вы говорите, что магазин вам предложил, но здесь на сайте вы только сегодня зарегались и здесь нет ни одного вашего обзора, а магазины не настолько глупы, чтобы рандомно выбирать любого проходимца и предлагать ему выслать на обзор товар стоимостью в 500$. Возникает резонный вопрос — где можно почитать ваши прошлые обзоры?
Хотя если честно, то я бы отказался от обзора такого дорогого товара. Почти уверен, что продаж будет немного.
Их можно найти на habrahabr.ru, geektimes.ru, на моих сайтах. Можете придти на лекцию. Все мои статьи бесплатны.
Если coolicool останутся недовольны и оплатят пересылку — отправлю коптер обратно, у меня хватает дома коптеров.
Я никого не агитирую покупать этот коптер. Я выразил свое вполне конкретное мнение — за $400 с копейками он своих денег стоит.
Про подвес говорить не буду — мой окзалася бракованным.
А собрать того же качества дешевле не получится, я сам публиковал статью как собрать дешевый коптер еще 3 года назад. С тех пор многое изменилось, но это все еще хорошая цена за такой функционал. За 300 баксов можно купить детали для 250го коптера на OpenPilot, который не будет держать высоту, не будет GPS, и им будет трудно управлять. Летать будет минут 5-7.
Так покажите людям, кто Вы, вот мои статьи, вот обзоры.
Потому как здесь ваш обзор тянет скорее на троечку, макс на четверочку (с большим натягом), особенно с учетом цены товара.
Я лишь написал, что Хабр и Гиктаймс для меня ниразу не авторитет. Возможно там вас все знают, но здесь Вы новичок, и никому не известны. Это сайт обзоров, хоть иногда и заметно более сложных чем статьи на хабре, но именно обзоров.
Так что поверьте, как раз мне все равно.
PS.нашёл ваш сайт, но как-то редко там публикуете статьи, по сравнению с тем же хабром…
Думаю вы добрый и позитивный человек, желаю вам успехов в ваших разработках)
за 500 баксов можно купить 1ый фантик.
если с рук то 2ой.
Если не хочется возиться — фантик однозначно лучше. Но вот если есть желание получить гибко настраиваемый коптер, то APM однозначно интереснее в плане мозгов. Любой аппарат на APM можно модернизировать или настроить под себя. У фантика эти возможности сильно ограничены. Многим этого хватает, как многих устраивает функционал iPhone. Я считаю, что тем, кто не хочет переплачивать, стоит знать, что есть выбор, тем более, что модель без подвеса стоит примерно $315
Купить даже желания не возникает.
Те кто шарит такой не купит, а для остальных он очень дорог.
У меня несколько коптеров собранных дома стоит, к тому же я занимаюсь их разработкой и читаю лекции по полетным контроллерам. Поэтому знаю, о чем говорю
Опубликовать его в статье не смогу — благодарите завистников и злопыхателей, сливших карму :)
youtu.be/4K0lih0XEQU
Мне все равно, а статью новую не написать и эту не отредактировать.
Ждем продолжения.…
Но ради видео, думаю, мы постараемся все исправить )
Народ, помогаем!
Ну и немного исправил оформление.
это же не выбор всей жизни. что-то заинтересовало-открыл почитал. не понравилось закрыл.
Этот девайс уже напоминает законченный коробочный продукт. Не без косяков, но они не фатальны. Кстати, порадовало качество комплектующих. Оригинальная разработка, экономили на количестве блоков, а не на качестве.
Здесь же, не смотря на качественные комплектующие, пайка начнет отлетать после пары тройки крашей(имхо).
А я лучше 250м обойдусь «без гпс», ибо он там не нужен, и с 7-9 минутами полета), ибо «не в этом счастье» для 250-го размера.
Но обзор мощный с технической стороны. Именно как обзор «кишок» он просто безподобен. Жаль, что нет полевых испытаний.
П.с. В карму однозначно плюс. А хейтеры пусть идут лесом.
П.п.с. Убедил ли автор лично меня купить это китайское нечто? Однозначно нет)))
100$ За невнятное 200mW fpv… Хммм)
П.п.п.с. Предлагаю переименовать обзор: «блаблабла». Часть 1. Обзор кишок.
И тогда вопросов нет.
Управляется он намного легче 250ки. Крэшеустойчивость отличная — я переворачивал несколько раз пока тестировал автопосадку и удержание, доводя до критических режимов. Совершенно без последствий. Пластик довольно прочный.
в остальном — Arducopter он и есть Arducopter. Со всеми его достоинствами и недостатками. Только коробочный — все настроено, откалибровано и летает. Только компас настроить, но это всем показано, включая фантики и инспайры.
И я с ними отчасти согласен. Техническая часть обзора отработана безупречна, но «Arducopter он и есть Arducopter» не скажет абсолютно ничего 99% здешней аудитории.
все-таки видео испытаний в разных режимах полета, демонстрация RTH, запись курсового видео (если, конечно, есть рекордер), пример записи с камеры на подвесе…
все это, имхо, повысило бы ценность обзора.
Вся цель показа товара это показать то, что он может (если такое возможно).
Как говорится лучше один раз увидеть, чем сто раз услышать.
Хоть я и не поклонник просмотра видео, но в данном случае без него никуда.
это, не смотря на мощную техническую часть, очень «не айс»)
Собственно это и причина того, почему я бы например не взял такой дорогой товар на обзор. Так как он накладывает определенные обязательства к обзору.
Чем дороже товар, тем сложнее его показать.
Конечно интересно было бы увидеть видео, снятое сами коптером, странно что автор об этом не подумал.
Подвес 2хосевой, если бы он работал, я бы поставил на него свою камеру и показал как он работает. Как работает стабилизация. Сразу могу сказать — будут подергивания по курсу влево-вправо, т.к. третьей оси, которая компенсирует эти движения нет. Для серьезной съемки не подойдет, для бытовой или хоббийной — вполне. А за 500 баксов не бывает даже подвесов отдельно, пригодных для серьезной съемки.
Плюс я в свои задачи не ставил все починить, если оно сломано. Я написал честный обзор о том, в каком виде оно пришло. Если починить подвес — работать будет, но слабые места все-таки есть, значит.
За редким исключением я сейчас не занимаюсь мелкими и дешевыми коптерами, если делать, то делать хорошо.
Но чинить (а не переделывать) не так уж сложно, тем более такой узел.
По фото похоже что там два моста, причем управление не от драйвера, а от дискретных транзисторов. Непонятно назначение пятой сборки, но тут по фото тяжело определить.
У нас есть относительно несложный робот, который иногда приходится апгрейдить\ремонтировать, вроде ничего сложного, но он находится в штатах, а рядом с ним человек, который не разбирается в электронике, ничего, как то справляемся на пару с программистом.
А тут плата, да у Вас в руках, да есть на чем сразу проверить (принесли бы Вам блок непонятно откуда с непонятной проблемой, снятый с пром оборудования, который даже проверить дома нельзя), да все инструменты и приборы.
И Вы ее не сделали, даже не знаю…
А зря.
А если серьезно — мне прислали коптер на обзор, у меня есть компетенции, чтобы разобрать его и сказать — это будет летать или не будет. Это он сделать сможет, а это даже не пытайтесь — смысла возиться нет. Я его разобрал, убедился, что он сделан просто. но вполне прилично, что это не тупое копирование без лицензии, а вполне самостоятельный продукт.
У китайцев всегда есть недоделки, они очень спешили, видимо, есть ошибки, но они не фатальны, продукт вполне получился. Это мое мнение.
Мы привыкли, что китайцы делают только дешевку и все должно стоить копейки. Но китайцы меняют парадигму, они учатся делать коробочные решения и это неплохая попытка. В коробке есть ВСЕ, что нужно по минимуму.
Тут нет рекордера и я не буду покупать себе рекордер, только потому что его нет в комплекте, я не буду менять штатный приемник на свой, потому что хочу показать как оно работает именно в том варианте, который собрали китайцы.
Да, я бы взял экран в 5-7", а не 4.3". Но и этот оказывается вполне приличным. Да, мне не нравится, что у экрана нет настроек и видео растянут, но все современные экраны 16:9, а картинка с камер до сих пор 4:3, идиотизм производителей в целом. Так что решение растянуть было правильным, но кнопочку выбора я бы оставил, а это деньги.
Поэтому любая доработка сделала бы продукт еще дороже, а пользоваться им можно и так вполне комфортно, без особых проблем.
Единственная серьезная проблема — компас не скалибровался и телеметрия на нестандартном порту, который прошивкой не поддерживается, но прошивка открытая, а на борту есть USB — потратить время и настроить можно.
Однако, я делаю это в свободное от других дел время и я выбрал опубликовать данные, которые кроме меня не так много народа сможет опубликовать. Потому что не обратят на это внимание и будут ходить разные предположения почему оно работает так, а не иначе.
Я сделал свое заключение — это работать будет. Настройка требуется, но брать это можно.
Итак, ручной режим работает прямо из коробки, хорошо работает.
С автоматикой надо повозиться немного, но это не чисто китайская поделка, в которую не влезешь, а стандартная открытая прошивка от американской компании 3D Robotics. Это очень и очень хорошо.
Подвес двухосевой, работать будет. если что не так или камера другая — можно подстроить, это стандартный ворованный AlexMos, поэтому такой дешевый. Лицензионный стоит 100 басков только сама плата. 8битный, это да, не 32битный, но для GoPro сойдет.
В мои задачи не входит все сделать за китайцев и бороться за их репутацию, исправлять заводской брак подвеса за свой счет. Я хочу чтобы читатели точно знали, что берут и что получат из коробки. Без лишних телодвижений.
Любители ковыряться и ремонтировать — добро пожаловать ко мне на сайт. Там эта статья тоже скоро будет, согласно правилам через пару дней. Будет время и желание — отремонтирую подвес. Но он не представляет из себя ничего нового — все это известно давным давно — уже пару лет точно. А вот сам коптер — новинка.
Я не храню дома запас радиодеталей на любой случай жизни, только то, что мне нужно. У меня есть паяльная станция, но я не радиоинжинер. Я могу починить этот подвес, но это не в приоритете — он двухосевой и мне не настолько интересен, чтобы убиться, но починить :)
Лично мне коптеры сами по себе не очень интересны, а вот поковыряться в железе я люблю.
Это да, напоминает советскую технику, которую всегда потом приходилось допиливать.
Я не знаю почему «вы» так привыкли, у меня несколько другое мнение. Они умеют делать хорошо и даже очень хорошо, если им за это заплатят соответственно.
В некоторых моих обзорах об этом так же упоминается.
Кстати не в первый раз обратил внимание, я всегда считал, что правильно — откалибровался, а не скалибровался.
возможно я ошибаюсь.
1. Вас не просят бороться за их репутацию.
2. Если Вам дали вещь ценой 500 баксов на обзор, то почему бы не потратиться на доработку или ремонт? Вы считаете что этот обзор соизмерим по стоимости с коптером? У меня есть более сложные обзоры на куда более дешевые товары.
Вам не интересен, другим может быть интересен. возможно другим был бы интересен процесс ремонта или инструкция по ремонту.
Здесь не Хабр и люди здесь обычно далеко не технари и как раз такая информация могла быть куда более полезной чем просто фотка платы того же подвеса (на которой даже ничего почти не видно, нельзя было хоть фото сделать более качественное?
А зачем кому то идти к Вам на сайт? Вроде это Вы сюда пришли с обзором, значит логичнее и общаться здесь.
Допустим я в состоянии разобраться с проблемой, но я точно не пойду к Вам на сайт, так как мне бегать по другим сайтам как минимум неинтересно, а как максимум у меня нет на это времени.
Кому известно? Только тем «кто в теме»?
16х9 модно, проще получить большую диагональ при меньшей площади экрана, значит лучше работает маркетинг.
А камеры идут 4х3 так как есть огромное кол-во отлаженных линий по их производству. Кроме того аналоговые камеры почти всегда приводят к стандарту 4х3, так как это соотношение сторон стандартного ТВ кадра. С цифровыми все проще, там 16х9 чаще.
Потратить пусть даже два-три часа времени это по Вашему — «убиться»?
Остается курсовая камера — фото картинки с нее есть в посте, могу сказать, что она на уровне лучших образцов, вполне приличная камера. Видеопередатчик хороший, мощности для его задач вполне достаточно. Камера аналоговая, передатчик аналоговый, естественно никакой записи с борта без дополнительных ухищрений быть не может.
Как сделать? могу рассказать в отдельной статье. Это уже не обзор продукта.
Возврат домой и зависание в точке не будут работать пока не откалибруется нормально компас. У меня есть ощущение, что компас был плохо приклеен и не параллелен полетному контроллеру, это требует настройки и облетать — процесс небыстрый. Если все настроится — напишу отдельный обзор по полетным качествам.
Коптеры из коробки не продает никто. Это летательный аппарат, а не игрушка. Игрушки летают сразу. В ручном режиме. Этот в ручном режиме летает так же хорошо, как и другие, а вот автоматику нужно настраивать. И для этого пригодилась бы телеметрия. модем я установил, нужно доработать прошивку.
RTH на видео закончилось в траве вверх тормашками. Потому что компас не скалибровался, а проверить по логам без телеметрии никак.
Фото экрана с картинкой с коптера в марте есть. Записать его штатно нечем, а полеты от первого лица по камере зависят от умения пилота.
но из этого всего у меня напрашивается только один вывод: коптер за 500(!) баксов толком не летает и не снимает)
GoPro (или аналога) нет? ну извините, это же его почти основная «фича», и то, что нечем его проверить… ну как бы сказать… помягче…
это как взять на обзор объектив для зеркалки за x00$, разобрать его до винтика (это плюс, несомненно), и написать, что мол извините, зеркалки то у меня нету, проверить нечем (а это большой минус).
Или как подробно, с разбором, обозреть приставку под 4к видео, но «потестить» ее на ламповом горизонте)
Простите за здоровую (я надеюсь) критику, если что не так.
То же самое с коптером — он летает, но автоматика требует калибровки, без калибровки он висит несколько секунд, а потом его сбивает с толку ненастроенный компас. На видео это прекрасно видно. Я могу показать, как должен летать настоящий беспилотник, но ценник его будет сильно повыше — больше миллиона рублей.
Я вчера показывал для ФСБ как летает немецкий Microdrones MD4-1000 за 20 000 евро — так вот на высоте 150 метров при порывах ветра его колбасит дай боже. Так что за 400-500 долларов получить вполне рабочий коптер, который можно настроить, а из коробки он уже летает так, что можно наслаждаться полетами по камере — это прекрасный вариант.
Фантом колбасит так же, улетает он время от времени тоже на ура :) А стоит не в пример побольше. Подвес от него сюда встанет отлично, видео будет шикарное, если снимать умеете.
Вы машину без обкатки эксплуатируете? Коптер посложнее небольшого самолета будет по электронике.
Так что со здоровьем у критики, как бы сказать помягче — не очень :)
Можно заменить на какие нибудь аналоги (возможно подошли бы irf7389 или лучше irf7319, у него истоки развязаны), думаю в пару-тройку баксов в оффлайне уложились бы даже заменив все.
Но я бы сначала сдул их с платы и проверил, возможно половинка вылетела и полумост (скорее всего они работают в таком включении) греет сам себя.
В общем не вижу сложной проблемы диагностировать такую неисправность, особенно с тем, что почитав ваш блог на Хабре я понял, что паять Вы точно умеете.
Причем можно диагностировать без покупки полевиков. Дела минут на 10-15.
Сейчас вот лежит полуразобранный коптер — пришлось вызванивать всю цепь от проца до порта телеметрии, чтобы обнаружить, что порт рабочий, залить свою тестовую прошивку, чтобы проверить что ничего не погорело, порт работает а просто китайцы ошиблись портом, развели ножки зеркально и телеметрии на этом порту нет :) Ну и свободное время на этом кончилось.
Без обид.
Впрочем, можете спросить тех, кто оттуда брал товар на обзор, они подтвердят :)
Но как я выше писал, я бы такой дорогой товар на обзор не брал, а по поводу более дешевого проще убеждать.
Кроме того не думаю что там такая сложная поломка, чтобы специалист долго над ней думал, ну день, ну два, ну три, это глобально что то решило бы?
Просто у автора видно опыта мало, как я думаю.
Можно было написать, что можно быстрее, но обзор будет плохим/не полным, что в принципе примерно и вышло.
Там вроде еще какие то дефекты были.
Вы точно уверены что он сделан довольно прилично? или мы уже о другом коптере говорим?
Полетник я чинил, потому что сам же и повредил дорожки при вскрытии.
Если вы эксперт по холодильникам, то думаю вполне можно поискать варианты :))
Я почитал статьи автора на других сайтах, интересно рассказывает, хотя от «коптерской» тематики весьма далёк…
Вопрос теперь уже к автору — какими проектами, помимо летательных аппаратов, Вы ещё увлекаетесь?
Пы.Сы. Уж лучше это; Eachine Pioneer E350