Инфракрасный датчик движения и ракеты воздух-воздух из 50-х годов — что может быть общего?
Краткий ответ на вопрос в заголовке — оба используют инфракрасные датчики и остроумную оптику, оба содержат инженерные решения, гениальные по своей простоте.
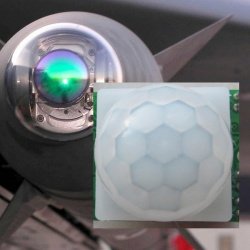
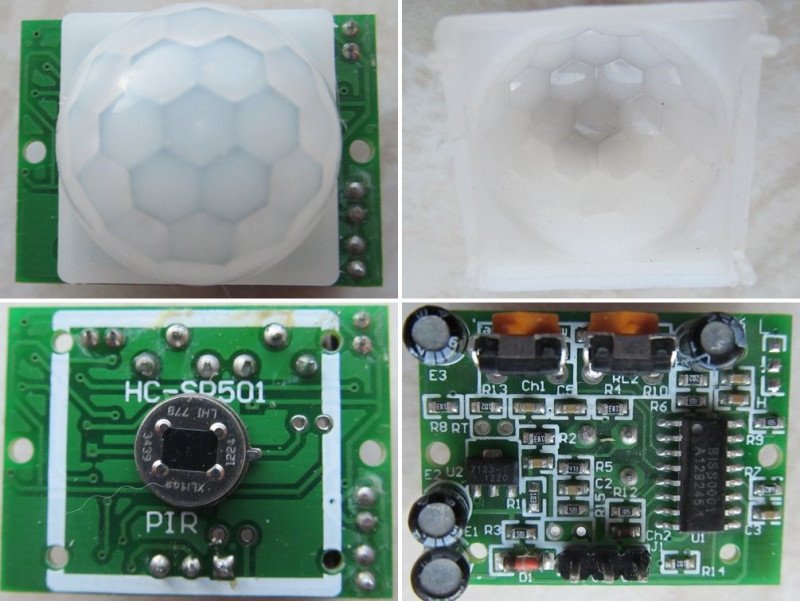
Начнем с пассивного инфракрасного датчика движения (passive infrared PIR motion sensor), который был изобретен в начале 70-х.
Опуская множество подробностей — внутри два (всего два, Карл!) чувствительных к инфракрасному излучению элемента и транзистор. Элементы включены встречно — т.е. когда на них поступает одинаковое количество излучения, на выходе напряжение компенсируется. Когда на один поступает больше, чем на другой — на выходе напряжение выше напряжения смещения, в противном случае — ниже.
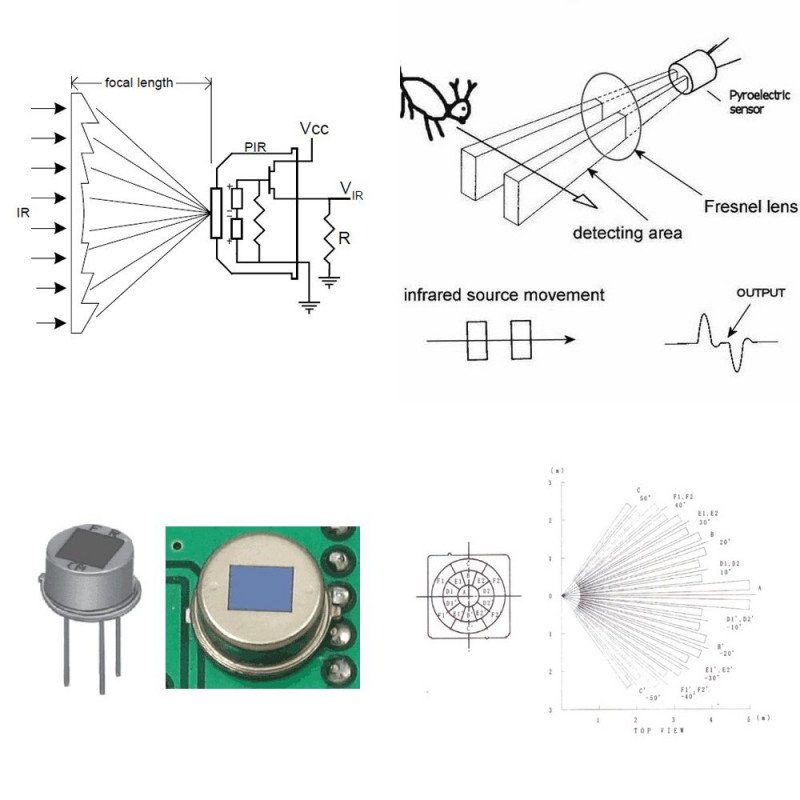
То есть, сам по себе датчик, этакий двухпиксельный сенсор, практически бесполезен. Магия делается при помощи белого колпачка поверх него, который состоит из множества линз. Когда вы двигаетесь мимо такого датчика, инфракрасное излучение от вас через одну из линз фокусируется на один из чувствительных элементов — таким образом, зона действия датчика 90...110° и несколько метров, датчик чувствителен в диапазоне от 8 до 14 мкм. И при этом ток потребления — единицы микроампер.
Очень хорошую статью про такие датчики можно найти здесь, переписывать ее вряд ли стоит.
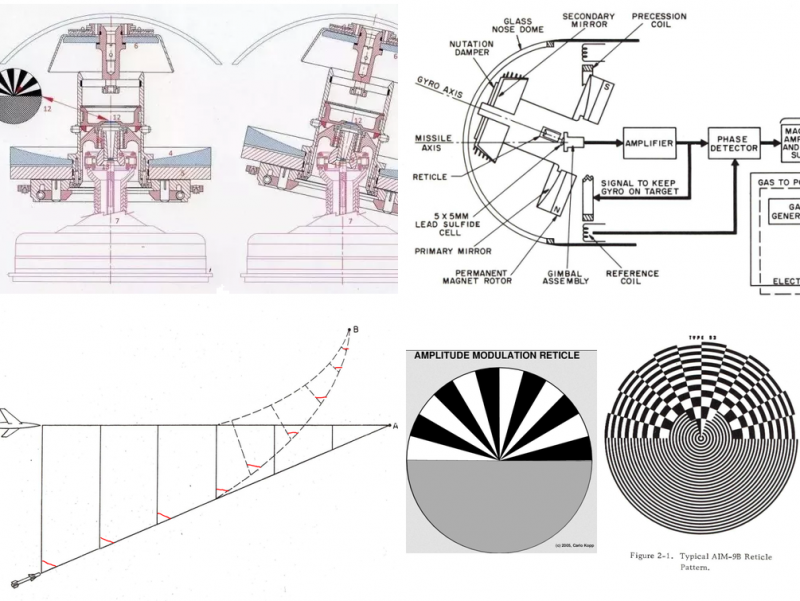
Второе простое изобретение — это система инфракрасного наведения ракеты воздух-водух Sidewinder (то бишь разновидность американской гремучей змеины).
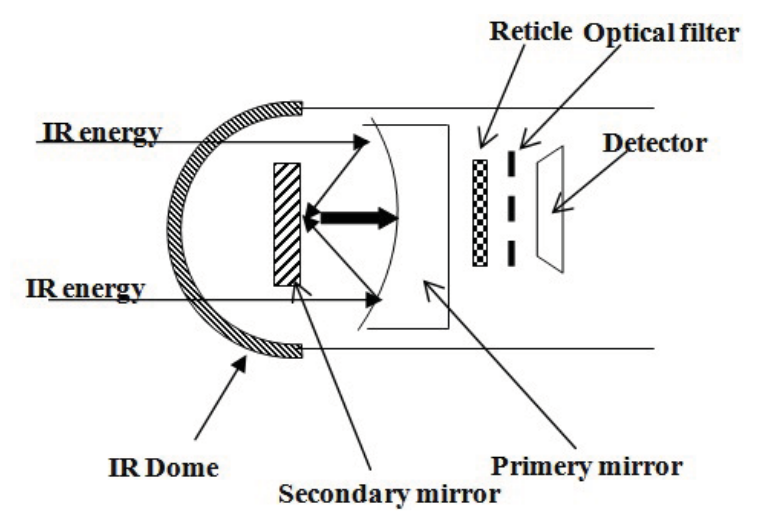
В ее основе — однопиксельная :) инфракрасная «камера».
Вся остальная магия делается вращающимся оптическим диском со специальным узором. Первыми вращающийся оптический диск в системах наведения бомб пытались использовать немцы во время войны, очевидно, у американских инженеров была информация о этой идее.

Ракеты у меня в гараже не завалялось (хотя некоторые узлы от них время от времени можно купить на eBay), поэтому для пояснения я надергал картинок из интернета. Ну и сжульничал немного — картинки относятся не к первой модели, у нее глаз не дергался. Зато крутящийся зрачок ракеты выглядит забавно — естественно, если такая ракета не летит за вами.
 Ну а оригинальная конструкция намного проще:
Ну а оригинальная конструкция намного проще:
Если кому интересна история разработки этой ракеты и принцип действия — здесь можно найти очень детальное описание.
Диапазон IR у этих вещей, естественно, сильно отличается. Датчик движения чувствителен к температуре человеческого тела, а головка наведения — на температуру «выхлопа» реактивного двигателя.
Одно, не имеющее к отношение к делу, техническое решение в этой же ракете. Настолько изящное и простое, что не упомянуть о нем просто невозможно.
Чтобы ракета не крутилась в полете, обычно устанавливают гироскопы — в давние времена механические, сейчас возможно и электронные. От них тем или иным образом управляются рули. На этой ракете гироскоп как бы есть и как бы его и нет.

На хвостовом оперении установлены небольшие подвижные плоскости со встроенными вращающимися дисками — роллероны. Эти диски раскручивались набегающим потоком воздуха. И все. При попытке ракеты закрутиться, роллероны за счет гироскопического эффекта быстро крутящихся дисков поворачивались и возвращали корпус в исходное положение. Просто, как мыло и работает как часы. Смотрите картинки — там все ясно.
Это была присказка, вернемся все-таки к нашим баранам, то бишь датчикам движения. Ардуиншикам наиболее известен модуль, продающийся китайскими товарищами за копейки. Там используется специализированная микросхема, можно регулировать время включения сенсора и его зависимость от внешнего освещение (датчик освещения, как правило, не впаян). Что печалит — при минимальном расходе энергии самим сенсором, модуль кушает около 10 мА.
А этот модуль выколупан из старого прожектора с галогенной лампой:

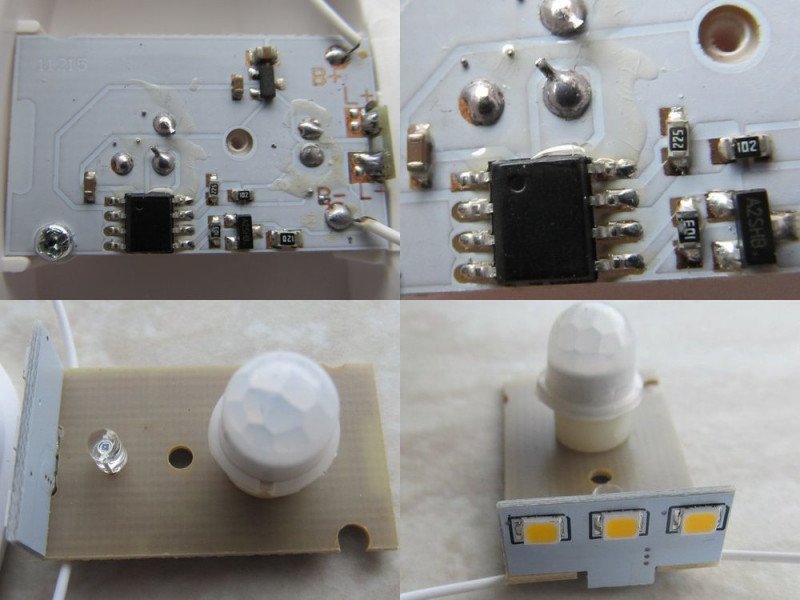
Я приобрел парочку разных батарейных ночников, дабы посмотреть, что там с потреблением в дежурном режиме. Нутро у них примерно одинаковое, сам PIR сенсор, датчик освещения, какой-то ASIC без названия (но они разные), транзисторный ключ и 3 параллельно соединенных светодиода с токоограничительным резистором. Питаются оба ночника от 3-х батарей ААА, светодиоды подключены непосредственно к батарейкам, а электроника питается от стабилизаторов с очень низким собственным потреблением — порядка 1мкА.


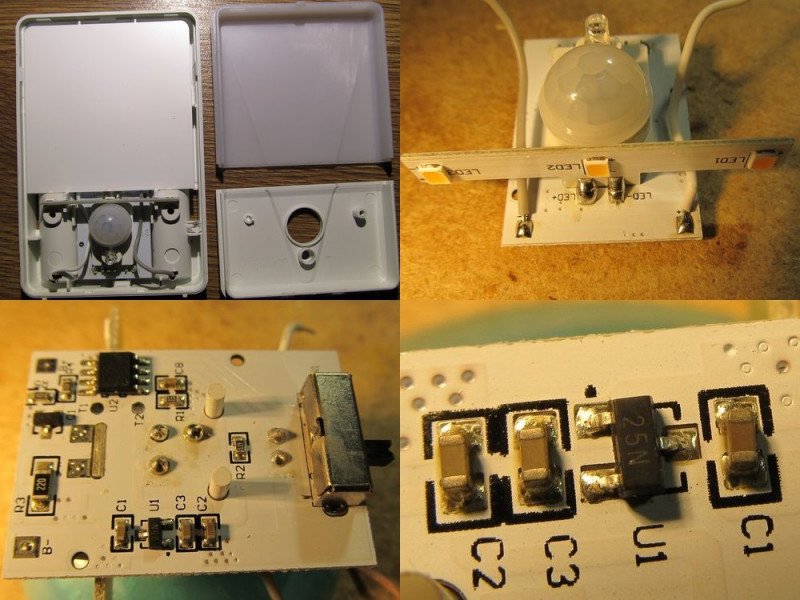
У одного в дежурном режиме ток 13мкА, у второго — 36мкА. У оного ток при включенных светодиодах 114мА, у другого — 78.


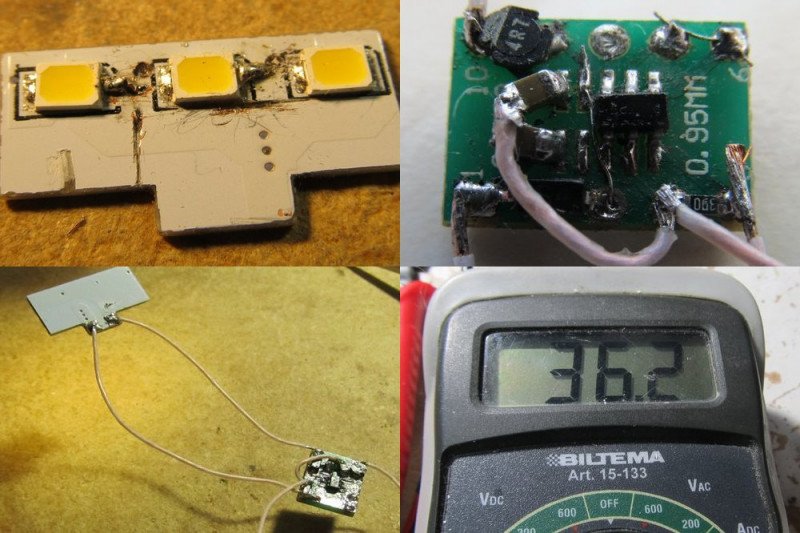
Схема с ограничением тока светодиода резистором расточительна, я не удержался и немного переделал один ночник — соединил все светодиоды последовательно и добавил повышающий преобразователь со стабилизацией тока. Со 114мА ток упал до 36 мА, яркость на глаз или не поменялась, или стала поярче — просто положил рядом два одинаковых ночника, один оригинальный, второй — модифицированный.
С головкой самонаведения самоделок и переделок, извините, не будет. По нынешним временам для отслеживания котиков проще поставить камеру с нормальным разрешением и избавиться от всяких подвижных элементов.
Хотя в старой технике часто удавалось сделать то, что казалось бы сделать невозможно безо всяких супер-пупер процессоров. И работало прекрасно, не требует обновлений, и никаких тебе багов. Вспомните тот же «Луноход» — у меня смутное подозрение, что его сделали безо всяких айфонов.
Если начать вспоминать, что на военной кафедре рассказывали, вылезет множество интереснейших вещей. Когда-то я делал блоки питания на магнитных усилителях, которых в военной технике применяются повсеместно. В то время высоковольтные транзисторы были большой редкостью, дорогие и горели, только в путь. У меня были КТ809А с максимальным напряжением 400 Вольт, на них я сделал автогенератор. Несколько выходных напряжений с раздельной стабилизацией делал при помощи магнитных усилителей.
Магнитный усилитель — это всего лишь навсего два ферритовых кольца с хитрой намоткой (хотя чего там хитрого?). Ну а управляющий ток через магнитный усилитель контролировался банальной К142ЕН2, если склероз не изменяет.
Блок питания получился простейший и надежнейший.
Противотанковая «Малютка» эпохи динозавров — вообще отдельная песня. Ракета, на корпус которой намотано больше 3 км провода. В полете она крутится и разматывает провод, по которому и управляется. Все безумно просто — правда, заставить ее прилететь, куда надо — дано не только лишь всем, все вручную.
Начнем с пассивного инфракрасного датчика движения (passive infrared PIR motion sensor), который был изобретен в начале 70-х.
Опуская множество подробностей — внутри два (всего два, Карл!) чувствительных к инфракрасному излучению элемента и транзистор. Элементы включены встречно — т.е. когда на них поступает одинаковое количество излучения, на выходе напряжение компенсируется. Когда на один поступает больше, чем на другой — на выходе напряжение выше напряжения смещения, в противном случае — ниже.
То есть, сам по себе датчик, этакий двухпиксельный сенсор, практически бесполезен. Магия делается при помощи белого колпачка поверх него, который состоит из множества линз. Когда вы двигаетесь мимо такого датчика, инфракрасное излучение от вас через одну из линз фокусируется на один из чувствительных элементов — таким образом, зона действия датчика 90...110° и несколько метров, датчик чувствителен в диапазоне от 8 до 14 мкм. И при этом ток потребления — единицы микроампер.
Очень хорошую статью про такие датчики можно найти здесь, переписывать ее вряд ли стоит.
Второе простое изобретение — это система инфракрасного наведения ракеты воздух-водух Sidewinder (то бишь разновидность американской гремучей змеины).
В ее основе — однопиксельная :) инфракрасная «камера».
Вся остальная магия делается вращающимся оптическим диском со специальным узором. Первыми вращающийся оптический диск в системах наведения бомб пытались использовать немцы во время войны, очевидно, у американских инженеров была информация о этой идее.
Ракеты у меня в гараже не завалялось (хотя некоторые узлы от них время от времени можно купить на eBay), поэтому для пояснения я надергал картинок из интернета. Ну и сжульничал немного — картинки относятся не к первой модели, у нее глаз не дергался. Зато крутящийся зрачок ракеты выглядит забавно — естественно, если такая ракета не летит за вами.
Ну а оригинальная конструкция намного проще:Если кому интересна история разработки этой ракеты и принцип действия — здесь можно найти очень детальное описание.
Диапазон IR у этих вещей, естественно, сильно отличается. Датчик движения чувствителен к температуре человеческого тела, а головка наведения — на температуру «выхлопа» реактивного двигателя.
Одно, не имеющее к отношение к делу, техническое решение в этой же ракете. Настолько изящное и простое, что не упомянуть о нем просто невозможно.
Чтобы ракета не крутилась в полете, обычно устанавливают гироскопы — в давние времена механические, сейчас возможно и электронные. От них тем или иным образом управляются рули. На этой ракете гироскоп как бы есть и как бы его и нет.
На хвостовом оперении установлены небольшие подвижные плоскости со встроенными вращающимися дисками — роллероны. Эти диски раскручивались набегающим потоком воздуха. И все. При попытке ракеты закрутиться, роллероны за счет гироскопического эффекта быстро крутящихся дисков поворачивались и возвращали корпус в исходное положение. Просто, как мыло и работает как часы. Смотрите картинки — там все ясно.
Это была присказка, вернемся все-таки к нашим баранам, то бишь датчикам движения. Ардуиншикам наиболее известен модуль, продающийся китайскими товарищами за копейки. Там используется специализированная микросхема, можно регулировать время включения сенсора и его зависимость от внешнего освещение (датчик освещения, как правило, не впаян). Что печалит — при минимальном расходе энергии самим сенсором, модуль кушает около 10 мА.
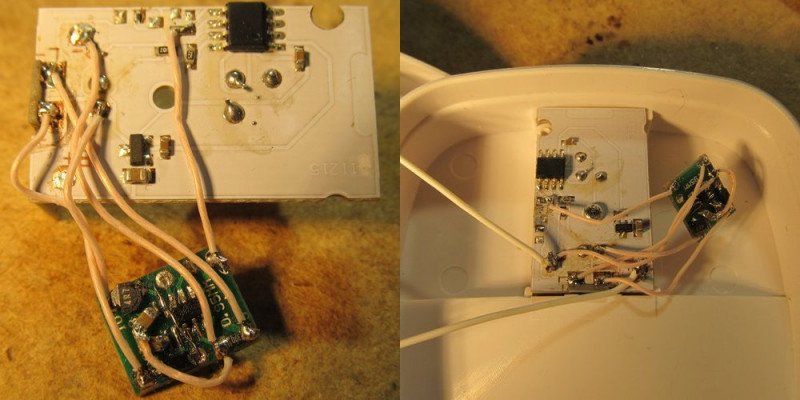
А этот модуль выколупан из старого прожектора с галогенной лампой:
Я приобрел парочку разных батарейных ночников, дабы посмотреть, что там с потреблением в дежурном режиме. Нутро у них примерно одинаковое, сам PIR сенсор, датчик освещения, какой-то ASIC без названия (но они разные), транзисторный ключ и 3 параллельно соединенных светодиода с токоограничительным резистором. Питаются оба ночника от 3-х батарей ААА, светодиоды подключены непосредственно к батарейкам, а электроника питается от стабилизаторов с очень низким собственным потреблением — порядка 1мкА.
У одного в дежурном режиме ток 13мкА, у второго — 36мкА. У оного ток при включенных светодиодах 114мА, у другого — 78.
Схема с ограничением тока светодиода резистором расточительна, я не удержался и немного переделал один ночник — соединил все светодиоды последовательно и добавил повышающий преобразователь со стабилизацией тока. Со 114мА ток упал до 36 мА, яркость на глаз или не поменялась, или стала поярче — просто положил рядом два одинаковых ночника, один оригинальный, второй — модифицированный.
С головкой самонаведения самоделок и переделок, извините, не будет. По нынешним временам для отслеживания котиков проще поставить камеру с нормальным разрешением и избавиться от всяких подвижных элементов.
Хотя в старой технике часто удавалось сделать то, что казалось бы сделать невозможно безо всяких супер-пупер процессоров. И работало прекрасно, не требует обновлений, и никаких тебе багов. Вспомните тот же «Луноход» — у меня смутное подозрение, что его сделали безо всяких айфонов.
Если начать вспоминать, что на военной кафедре рассказывали, вылезет множество интереснейших вещей. Когда-то я делал блоки питания на магнитных усилителях, которых в военной технике применяются повсеместно. В то время высоковольтные транзисторы были большой редкостью, дорогие и горели, только в путь. У меня были КТ809А с максимальным напряжением 400 Вольт, на них я сделал автогенератор. Несколько выходных напряжений с раздельной стабилизацией делал при помощи магнитных усилителей.
Магнитный усилитель — это всего лишь навсего два ферритовых кольца с хитрой намоткой (хотя чего там хитрого?). Ну а управляющий ток через магнитный усилитель контролировался банальной К142ЕН2, если склероз не изменяет.
Блок питания получился простейший и надежнейший.
Противотанковая «Малютка» эпохи динозавров — вообще отдельная песня. Ракета, на корпус которой намотано больше 3 км провода. В полете она крутится и разматывает провод, по которому и управляется. Все безумно просто — правда, заставить ее прилететь, куда надо — дано не только лишь всем, все вручную.
Самые обсуждаемые обзоры
Комменты к видео доставляют
Недавно ему новый firmware прошивали в его 70-килобайтный компьютер с расстояния в 25 млрд. километров, что отдельно доставляет…
Если микроскопом привести в тот же размер что старая техника, то станет не менее завораживающей.
или речь как раз об отработке той самой системы, которую разрабатывали для мкр? ну тогда можно сказать что и на ил-12 была ;) отрабатывать с них начинали.
В лазерных принтерах используется механическая развёртка с помощью вращающегося зеркала.
Так что технологии механического телевидения до сих пор живее всех живых :).
Можно солнечную батарею на солнце ориентировать.
Теперь поправил текст.
Короче — аж 500+ грамм серии к133, штук 15 плат размером с лист тетради усыпанные с обеих сторон золотыми чипами, одних оу к140уд7 он насчитал 50+ штук, около килограмма ценных зеленых км-конденсаторов, высочайшая интеграция элементов брежневского периода повергнет ценителей олдскула в шок. Так вот, система наведения очень похожа на первые образцы американских ракет 60-70 годов много раз описанных блоггером Марком Солониным и очень похоже на описанную в обзоре конструкцию. В первых образцах было всего то 5 фотодатчиков. + в карму
А так, у меня такое подозрение что все почти влезло бы в парочку микроконтроллеров
Практически вся военная техника, при взгляде со стороны, является иконой ретрограда. А при взгляде изнутри — суровой необходимостью.
Операционные усилители типа к140 устарели не больше, чем их аналоги от Фейрчайлда и Тексас-Инструментс, которые американцами выпускаются по сей день.
Брал такие. В корпус свободно влезают еще 2 акк 18650. По току потребления не скажу — не измерял. 3 режима работы + датчик освещенности и солнечная батарея. В темноте на максимуме при 30-40 срабатываниях за сутки хватает на 10 дней. Сделал отдельный вход для зарядки от зарядного устройства.
при питании от 3 элементов — она весьма проста и экономна, разве что не очень стабилизирована.
Со 114мА ток упал до 36 мА
через диоды — не удивительно, 3 последовательно вместо 3х паралельно и должно упасть втрое. если же это на входе преобразователя — значит ток через диоды сильно снижен.
Магнитный усилитель — это всего лишь навсего два ферритовых кольца с хитрой намоткой (хотя чего там хитрого?). Ну а управляющий ток через магнитный усилитель контролировался банальной К142ЕН2, если склероз не изменяет.
типичная реализация 3.3 в atx бп (до появления независимых dc-dc) — именно такая. правда из активного там транзистор и tl431.
Главная интрига так и не раскрыта — как там получаюся такие токи?
Тогда не понимаю, зачем пихатиь столько энергии в ИК передатчики (пульты) если пид датчики такие чувствительные.
Отличное фото :)