Квадрокоптер JJRC JJ820 как зимний эмулятор мухи

- Цена: $19.99 (покупал за $16,59, сейчас $16,79)
- Перейти в магазин
Начало моего знакомства с миром радиоуправляемых моделей можно охарактеризовать примерно так: первым делом мы испортим вертолеты… Иными словами, какой-то простой ИК-вертолет я успешно угробил, хотя с виду он до сих пор почти как новый. Но вариантов нет — сразу при взлете его уносит вбок.
Пока размышлял о покупке нового — подоспели и квадрокоптеры. Ну а так как я не питаю к вертолетам никакой романтической привязанности, то закономерно нацелился на модную ныне многомоторную многовинтовую схему.
Требования у меня, как обычно простые — чтобы не слишком дорого, не очень сложно и чтобы защита винтов была побольше. Не шарик, конечно, но и не совсем уж четыре дужки. Потому что думал, что в свете развлечения квадрокоптером кота это будет актуально.

Как заметил внимательный читатель, подобных квадрокоптеров — море. И похож он на любой из них, и на всех вместе. Ну а так как я не слишком в них разбираюсь, то закономерно решил, что все похожие по виду примерно похожи и по характеристикам.


И в итоге к своим хотелкам добавил еще пару параметров — чтобы было написано «6 axis gyroscope» и «headless». Просто потому, что по поводу 6-осевого гироскопа утверждают, что машинка получается стабильнее, а режим headless должен был бы позволять летать не особо заботясь об ориентации.
Меня тоже смутила надпись Infrared, но было очевидно, что здесь радиоуправление. Собственно, так и есть.

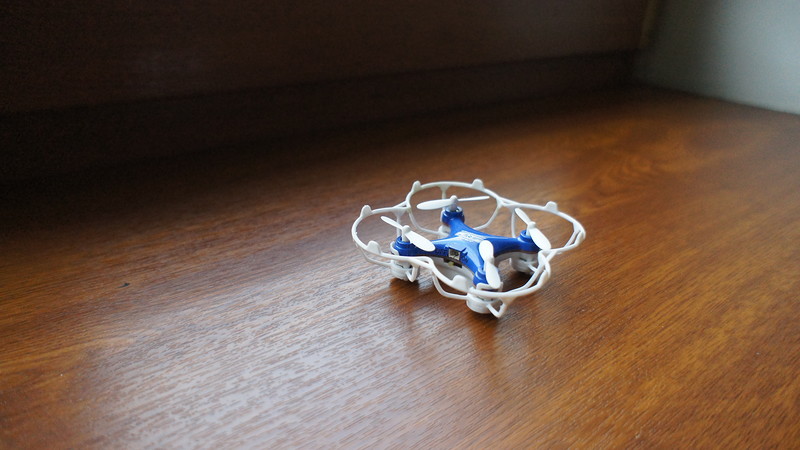
Финалистом оказался JJRC JJ820, обзор которого я здесь не нашел (хотя похожих масса), который поставляется примерно в том же комплекте, что и все остальные подобные модели:
— квадрокоптер
— запасные лопасти
— зарядное устройство
— инструкция

Если разглядывать квадрокоптер, то видно, что в отличие от более серьезных моделей, аккумулятор не так-то просто достать из корпуса для, скажем, замены. И, кроме того, для включения квадрокоптера служит обычный выключатель, а не как у тех же серьезных моделей соединение кабелей от квадрокоптера и аккумулятора.
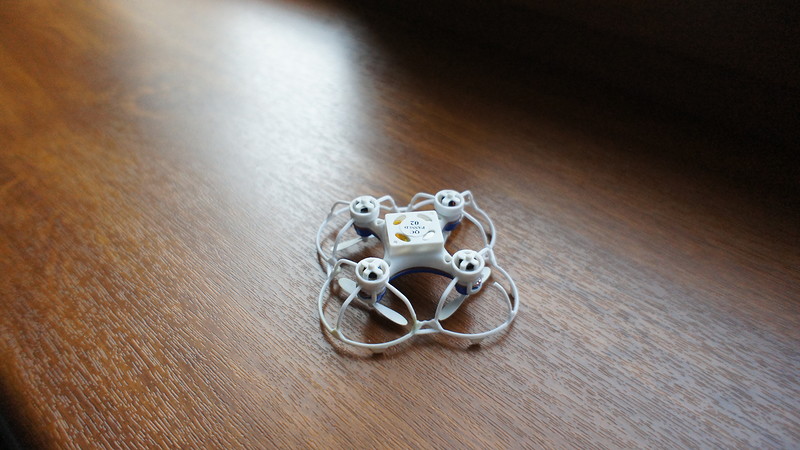
В этой связи для зарядки здесь предусмотрен отдельный разъем.

Меня эти особенности вполне устраивали, поскольку покупал игрушку, и батарейки особо часто менять не собирался. Опять же, говорят, что замена батареек хороша, если хочется подольше летать, но в этом случае нужно следить за температурой двигателей. А здесь — полетал, пока заряжается — остывает. И все довольны.
Цикл, по-моему, как у всех — около 6,5 минут полета на 25 (плюс-минус) минут зарядки. Правда зарядное устройство оригинальное: я привык, что обычно индикатор горит, пока батарейка не зарядится, а здесь — наоборот. Т.е. понять, что квадрокоптер заряжается невозможно, пока (и если) он не зарядится. Потому что только в этом случае загорится индикатор на зарядке.
Зарядился:

Кроме прочего есть и четыре светодиода — два синих и два красных (свет и габариты в автомобильной терминологии), чтобы отличать, какой стороной квадрокоптер полетит вперед в обычном режиме. В режиме headless они просто мигают, как и при разрядке батареи.
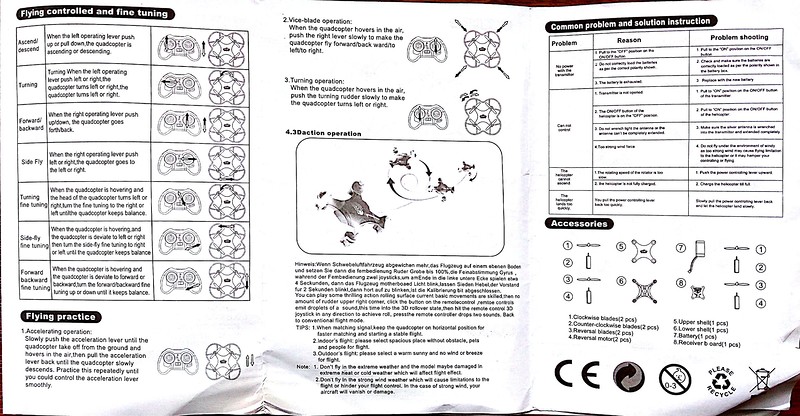
Так как квадрокоптер у меня первый, инструкцию я все же решил прочитать. И хочу сказать, что мало что понял. Китайский английский здесь оказался нечитаем настолько, что меня даже описание триммирования поставило в тупик. Поскольку китайцы подразумевают корректировку по трем направлениям двумя двухпозиционными кнопками.
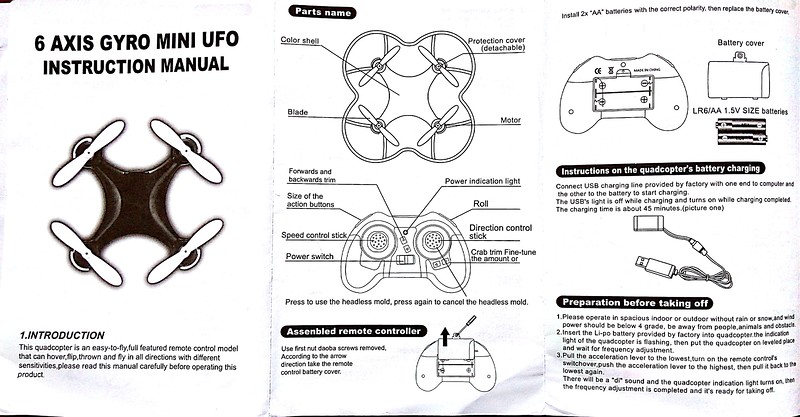
В общем, решил, что буду разбираться в процессе.
Пульт также очень похож на массу других подобных. Небольшой, удобно ложится в руки. Питается от двух АА-батареек. Слева стик управления, скажем так, по вертикальной оси: подъем-спуск и и вращение. Если отпустить, то при управлении высотой (тягой) стик остается в последнем положении, а при вращении возвращается в центр.

Левый стик служит и для «сопряжения» с квадрокоптером. Для этого, как и у многих других, после включения нужно сдвинуть стик сначала до упора вверх, а потом — вниз.
Справа стик направлений полета — вперед/назад и влево/вправо. При отпускании всегда возвращается в центр. Нажатие на стик включает и выключает режим headless.
Между стиков и под правым стиком — кнопки триммирования. Если честно, не особо заметил эффект, но пусть будут.
Спереди еще пара кнопок. Назначение левой я абсолютно не понял (возможно — изменение динамики), при нажатии пульт пищит то один, то два раза.
Правая кнопка позволяет делать флипы, для чего следует ее нажать, а затем выбрать направление флипа с помощью стика направлений.

Теперь, наверное, имеет смысл рассказать про мои впечатления от полетов. Во-первых, квадрокоптер гораздо удобнее того вертолета, что у меня был. Гораздо стабильнее и проще в управлении. Во-вторых, он оказался довольно прочным — за то время, что я успел «разбить» вертолет, квадрокоптер отделался только лопнувшей в одном месте защитой. Ну и защелки корпуса частично открылись — но это было просто исправить: защелкнул их обратно, и снова в полет.
Лопнувшая защита:

В третьих, даже несмотря на элементарное управление, летать я так и не научился. И, похоже, обречен ползать вечно. Но не суть. Это просто чтобы было понятно, почему я буду описывать полет так, как буду.
Для меня оказалось довольно сложно контролировать высоту квадрокоптера. По факту легче всего его «повесить» в нескольких сантиметрах от пола, когда действует эффект воздушной подушки. И это мне понравилось больше всего — так и кота просто развлекать, и в футбол его шариками можно со скуки поиграть, и разбить квадрокоптер никакого риска.
А если поднимать выше, то получается странно — после прохода стиком центральной позиции, квадрокоптер постоянно поднимается вверх, даже если я уже и не двигаю стик. Аналогично и вниз — показал направление, и он опускается, вместо того, чтобы висеть на высоте, заданной стиком. В общем, если хочется держать одну высоту, приходится постоянно подруливать стиком.
Задачу усложняет тот факт, что у аппарата (для меня) довольно большая инерция. Т.е. он не сказать, чтобы моментально реагирует на команды. И в итоге можно легко пролететь на метр выше или ниже в попытке поймать «нулевую» точку.
Аналогично и с направлением полета: квадрокоптер продолжает лететь в заданном стиком направлении, даже если стик уже отпущен. С одной стороны можно понять — не настолько там сложная система управления, чтобы такое обрабатывать. С другой стороны — тоже приходится парировать противоположным движением, чтобы остановиться.
Флипы, конечно, впечатляют. Но не могу, как другие, сказать, что нет потери высоты. Есть и составляет она примерно полметра. Опять же, возможно, я что-то делаю не так. Может быть, перед флипом надо добавить мощности, или выполнять его в полете, а не на зависании, не знаю.
Преимущества режима headless я тоже не понял. По крайней мере, проще летать не стало. К тому же, при каждой незапланированной посадке или изменении позиции, этот режим нужно отключать и снова включать, чтобы сохранить новую ориентацию. Или я опять чего-то не понял.
Летать я не умею, предупреждал:
А здесь можно убедиться, что аппарат довольно крепкий:
И, конечно, не для улицы эта штука. Ветер довольно сильно мешает.
Кстати, по поводу защиты. Она, конечно, в падениях помогает. Но при этом периодически норовит самопроизвольно слететь, как, полагаю, нижнее белье у дам, пришедших на концерт Стаса Михайлова. Иногда, знаете, раздражает. Это я уже не про белье и не про Стаса, а отваливающуюся при падениях защиту.
С другой стороны, делает свое дело — тоже хорошо.
Что же до развлекаемого кота, то он периодически интересовался новой игрушкой. И, если добирался до места посадки первым, пытался взять в зубы и утащить куда-то, куда коты обычно тащат свою добычу.
Но несмотря на защиту приходилось быть предельно осторожным. Поэтому я эксперименты с развлечением кота прекратил — страшно. И страшно не за квадрокоптер, если что.
Если подвести итог, то получается, что ждал я несколько большего, но игрушкой все равно доволен. Включаю, знаете, поднимаю на высоту роста и медитирую, пытаясь удержать в одной точке.
Умиротворяет.
Пока размышлял о покупке нового — подоспели и квадрокоптеры. Ну а так как я не питаю к вертолетам никакой романтической привязанности, то закономерно нацелился на модную ныне многомоторную многовинтовую схему.
Требования у меня, как обычно простые — чтобы не слишком дорого, не очень сложно и чтобы защита винтов была побольше. Не шарик, конечно, но и не совсем уж четыре дужки. Потому что думал, что в свете развлечения квадрокоптером кота это будет актуально.
Как заметил внимательный читатель, подобных квадрокоптеров — море. И похож он на любой из них, и на всех вместе. Ну а так как я не слишком в них разбираюсь, то закономерно решил, что все похожие по виду примерно похожи и по характеристикам.
И в итоге к своим хотелкам добавил еще пару параметров — чтобы было написано «6 axis gyroscope» и «headless». Просто потому, что по поводу 6-осевого гироскопа утверждают, что машинка получается стабильнее, а режим headless должен был бы позволять летать не особо заботясь об ориентации.
Меня тоже смутила надпись Infrared, но было очевидно, что здесь радиоуправление. Собственно, так и есть.
Финалистом оказался JJRC JJ820, обзор которого я здесь не нашел (хотя похожих масса), который поставляется примерно в том же комплекте, что и все остальные подобные модели:
— квадрокоптер
— запасные лопасти
— зарядное устройство
— инструкция
Если разглядывать квадрокоптер, то видно, что в отличие от более серьезных моделей, аккумулятор не так-то просто достать из корпуса для, скажем, замены. И, кроме того, для включения квадрокоптера служит обычный выключатель, а не как у тех же серьезных моделей соединение кабелей от квадрокоптера и аккумулятора.
В этой связи для зарядки здесь предусмотрен отдельный разъем.
Меня эти особенности вполне устраивали, поскольку покупал игрушку, и батарейки особо часто менять не собирался. Опять же, говорят, что замена батареек хороша, если хочется подольше летать, но в этом случае нужно следить за температурой двигателей. А здесь — полетал, пока заряжается — остывает. И все довольны.
Цикл, по-моему, как у всех — около 6,5 минут полета на 25 (плюс-минус) минут зарядки. Правда зарядное устройство оригинальное: я привык, что обычно индикатор горит, пока батарейка не зарядится, а здесь — наоборот. Т.е. понять, что квадрокоптер заряжается невозможно, пока (и если) он не зарядится. Потому что только в этом случае загорится индикатор на зарядке.
Зарядился:
Кроме прочего есть и четыре светодиода — два синих и два красных (свет и габариты в автомобильной терминологии), чтобы отличать, какой стороной квадрокоптер полетит вперед в обычном режиме. В режиме headless они просто мигают, как и при разрядке батареи.
Так как квадрокоптер у меня первый, инструкцию я все же решил прочитать. И хочу сказать, что мало что понял. Китайский английский здесь оказался нечитаем настолько, что меня даже описание триммирования поставило в тупик. Поскольку китайцы подразумевают корректировку по трем направлениям двумя двухпозиционными кнопками.
В общем, решил, что буду разбираться в процессе.
Пульт также очень похож на массу других подобных. Небольшой, удобно ложится в руки. Питается от двух АА-батареек. Слева стик управления, скажем так, по вертикальной оси: подъем-спуск и и вращение. Если отпустить, то при управлении высотой (тягой) стик остается в последнем положении, а при вращении возвращается в центр.
Левый стик служит и для «сопряжения» с квадрокоптером. Для этого, как и у многих других, после включения нужно сдвинуть стик сначала до упора вверх, а потом — вниз.
Справа стик направлений полета — вперед/назад и влево/вправо. При отпускании всегда возвращается в центр. Нажатие на стик включает и выключает режим headless.
Между стиков и под правым стиком — кнопки триммирования. Если честно, не особо заметил эффект, но пусть будут.
Спереди еще пара кнопок. Назначение левой я абсолютно не понял (возможно — изменение динамики), при нажатии пульт пищит то один, то два раза.
Правая кнопка позволяет делать флипы, для чего следует ее нажать, а затем выбрать направление флипа с помощью стика направлений.
Теперь, наверное, имеет смысл рассказать про мои впечатления от полетов. Во-первых, квадрокоптер гораздо удобнее того вертолета, что у меня был. Гораздо стабильнее и проще в управлении. Во-вторых, он оказался довольно прочным — за то время, что я успел «разбить» вертолет, квадрокоптер отделался только лопнувшей в одном месте защитой. Ну и защелки корпуса частично открылись — но это было просто исправить: защелкнул их обратно, и снова в полет.
Лопнувшая защита:
В третьих, даже несмотря на элементарное управление, летать я так и не научился. И, похоже, обречен ползать вечно. Но не суть. Это просто чтобы было понятно, почему я буду описывать полет так, как буду.
Для меня оказалось довольно сложно контролировать высоту квадрокоптера. По факту легче всего его «повесить» в нескольких сантиметрах от пола, когда действует эффект воздушной подушки. И это мне понравилось больше всего — так и кота просто развлекать, и в футбол его шариками можно со скуки поиграть, и разбить квадрокоптер никакого риска.
А если поднимать выше, то получается странно — после прохода стиком центральной позиции, квадрокоптер постоянно поднимается вверх, даже если я уже и не двигаю стик. Аналогично и вниз — показал направление, и он опускается, вместо того, чтобы висеть на высоте, заданной стиком. В общем, если хочется держать одну высоту, приходится постоянно подруливать стиком.
Задачу усложняет тот факт, что у аппарата (для меня) довольно большая инерция. Т.е. он не сказать, чтобы моментально реагирует на команды. И в итоге можно легко пролететь на метр выше или ниже в попытке поймать «нулевую» точку.
Аналогично и с направлением полета: квадрокоптер продолжает лететь в заданном стиком направлении, даже если стик уже отпущен. С одной стороны можно понять — не настолько там сложная система управления, чтобы такое обрабатывать. С другой стороны — тоже приходится парировать противоположным движением, чтобы остановиться.
Флипы, конечно, впечатляют. Но не могу, как другие, сказать, что нет потери высоты. Есть и составляет она примерно полметра. Опять же, возможно, я что-то делаю не так. Может быть, перед флипом надо добавить мощности, или выполнять его в полете, а не на зависании, не знаю.
Преимущества режима headless я тоже не понял. По крайней мере, проще летать не стало. К тому же, при каждой незапланированной посадке или изменении позиции, этот режим нужно отключать и снова включать, чтобы сохранить новую ориентацию. Или я опять чего-то не понял.
Летать я не умею, предупреждал:
А здесь можно убедиться, что аппарат довольно крепкий:
И, конечно, не для улицы эта штука. Ветер довольно сильно мешает.
Кстати, по поводу защиты. Она, конечно, в падениях помогает. Но при этом периодически норовит самопроизвольно слететь, как, полагаю, нижнее белье у дам, пришедших на концерт Стаса Михайлова. Иногда, знаете, раздражает. Это я уже не про белье и не про Стаса, а отваливающуюся при падениях защиту.
С другой стороны, делает свое дело — тоже хорошо.
Что же до развлекаемого кота, то он периодически интересовался новой игрушкой. И, если добирался до места посадки первым, пытался взять в зубы и утащить куда-то, куда коты обычно тащат свою добычу.
Но несмотря на защиту приходилось быть предельно осторожным. Поэтому я эксперименты с развлечением кота прекратил — страшно. И страшно не за квадрокоптер, если что.
Если подвести итог, то получается, что ждал я несколько большего, но игрушкой все равно доволен. Включаю, знаете, поднимаю на высоту роста и медитирую, пытаясь удержать в одной точке.
Умиротворяет.
Самые обсуждаемые обзоры
| +36 |
3017
83
|
| +66 |
2539
40
|
| +19 |
1974
35
|
Кстати, по поводу защиты. Она, конечно, в падениях помогает. Но при этом периодически норовит самопроизвольно слететь
ее можно зафиксировать, просунув в «корзины» движков проволочку, у двух по диагонали должно хватать.
А если поднимать выше, то получается странно — после прохода стиком центральной позиции, квадрокоптер постоянно поднимается вверх, даже если я уже и не двигаю стик.
так регулируется-то подьемная сила, а не высота. это у всех так, во всяком случае сравнительно мелких. у более крупных бывают барометрические датчики.
Стиком газа нужно работать аккуратно, постоянно по чуть-чуть корректируя. С родными шляпками получается слишком резко.
Мой был без защиты, штук 5 пропеллеров сломал, пока относительно летать научился. :)