Обзор робота-пылесоса Roidmi Eva со станцией самоочистки и крутящимися тряпками для влажной уборки

- Цена: 60000 руб.
- Перейти в магазин
В современной жизни робот-пылесос становится чем-то большим, чем просто товар для осуществления сухой уборки. Влажная уборка приобретает новую форму: крутящийся или вибрирующий механизм тряпок. Влажная уборка если не становится эффективной, как и ручная, но всё ближе и ближе к ней приближается. Обозреваемую модель отличает станция самоочистки, промывки тряпок и очищения контейнера для мусора. Пользователю толькоьи остается, что менять тряпки и воды в баках.
Ниже представлен обзор робота-пылесоса Roidme Eva, в комплекте которого есть станция самоочистки. Обзор построен следующим образом: оптсаныие пылесоса, станции, технические характеристики и в основной части расказывается про управление через приложение, варианты уборки с выделением положительных и узких мест, приводятся анимации отдельных событий (увеличение мощности при заезде на коверх, избегание ковра) и оценивается мощность всасывания. Последний раздел заключает обзор.
Описание
Робот-пылесос
Товар находится в дополнительной упаковке с логотипом бренда. Основные характеристики выделы отдельно — вращающиеся щетки и станция самоочистки.
Внутри всё упаковано красиво и разложено по коробкам, как это бывает в топовых модификациях роботов-пылесосов. В комплекте лежат расходники: щётка для протирки станции, трехлепестковая и две пары круглых тряпок для мытья пола. Станция самоочистки — большая, как по весу, так и по обьему. Ее вес — 9,8 кг при весе робота в 4,2 кг.
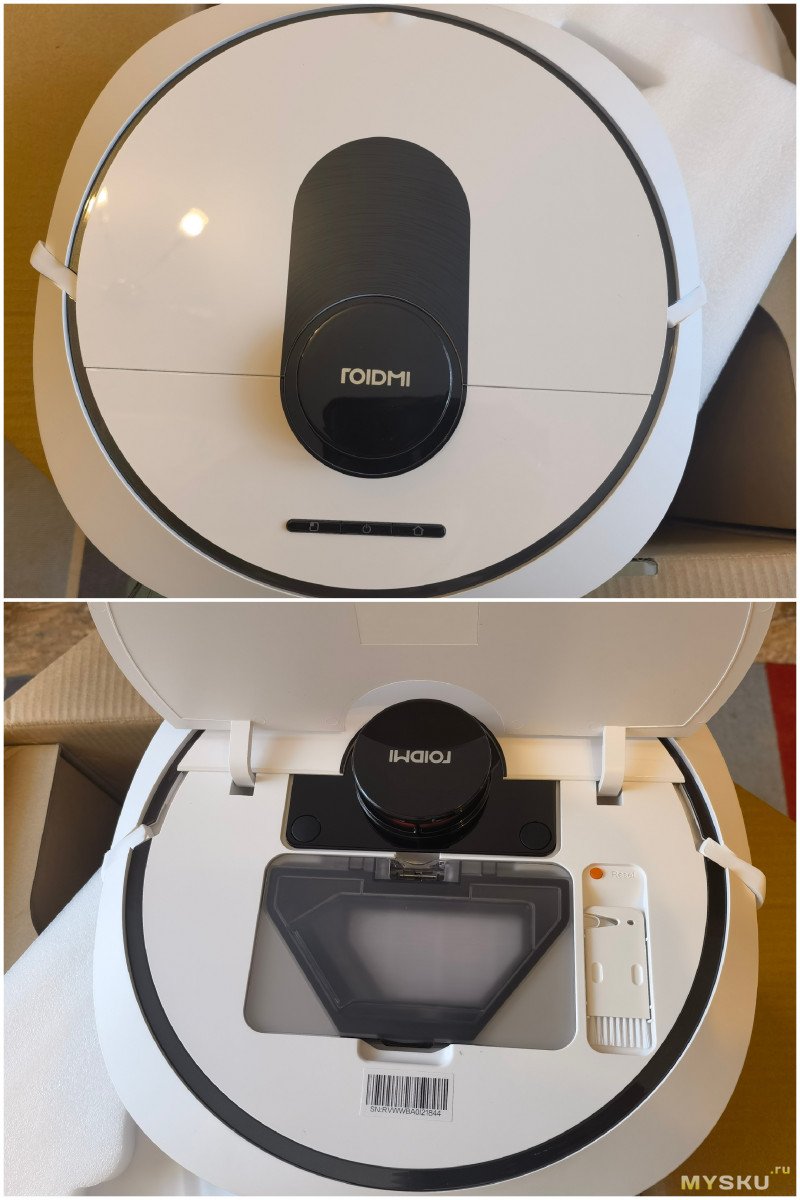
Маршруты Roidmi Eva строит исходя из определения местности по лидару. Модель отличается от предыдущих версий (Eve) системой лазеров, при помощи которой происходит определение препятствий. Лидар занимает привычное место на корпусе. Позволяет строить карты, выбирать зоны, строить виртуальные стены или запретные области. Через приложение можно назначать второй этаж (несколько), или использовать робота в других локациях, сохраняя основную. Лазеры находятся на лицевой панели. К сожалению, мелкие предметы им определяются плохо.

Щётка Eva на защитном корпусе имеет подобие пружинному механизму, который прижимается ближе к ворсинкам валика, тем самым вычищая его в момент уборки. Ниже показаны фотографии, в том числе и щетки, которая сделана из резины с двумя типами дополнительных ворсинок. такой тип валика лучше выметает грязь с пола. Большой плюс, что щётка сделана из мягкой резины, что относит ее к аналогичным в дорогих моделях от других производителей. Ее удобно мыть и очищать от намотавшихся волос при помощи «ножика», который находится под верхней крышкой.
Вращающиеся щетки крепятся к корпусу на магнитах. Отсоединяются от корпуса они только вручную: если вы хотите провести только сухую уборку, то их можно или снять, или указать на это в приложении. При выборе влажной уборки Eva не будет заезжать на ковер. В комплекте — 2 пары. Учитывая, что их просушка в базовой станции осуществляется холодным воздухом, стоит после нескольких уборок менять их на запасные, а первые промывать руками и сушить на батарее, к примеру.

В модельном ряду Roidmi есть похожий робот-пылесос со станцией — Eve. Отличие состоит только в большей станцией самоочистки и промывке щеток у обозреваемой. В обеих моделях контейнер для сбора мусора небольшой. Очищать его требуется чаще. Решить это можно через настройки в приложении Mi Home, к примеру, указав, что используется робот в большой квартире, поэтому очистка контейнера нужна каждый раз при заряде. На фотографиях ниже показаны сверху лидар и контейнер для сбора мусора, на третьей фотографии — система распознования предметов. Она должна не давать пылесосу врезаться в препятствия, но по факту работает не всегда корректно: носок или мелкий предмет может таскать за собой, пока не переедет, или не запутается в нем.
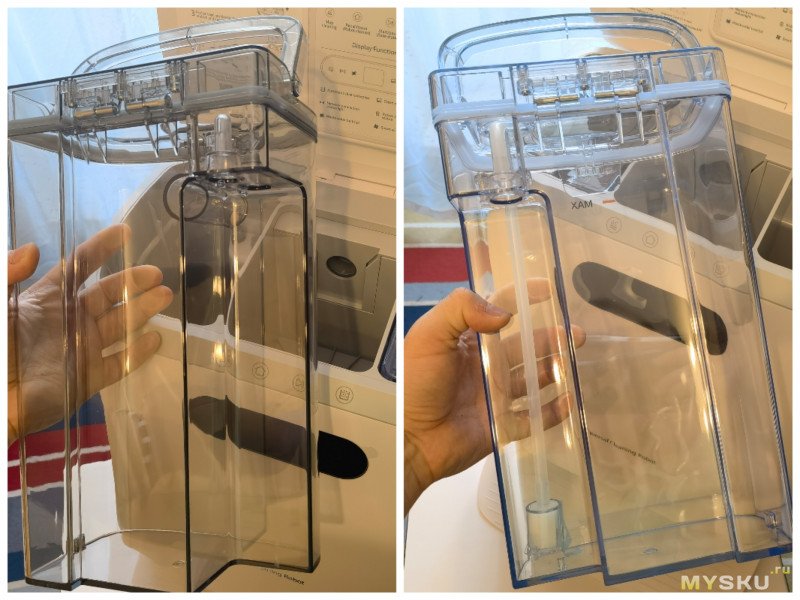
Контейнер для сбора мусора показан ниже на подробных фотографиях. Есть две разновидности, в одной из которых фильтр (прямоугольный, большего размера) располагается сбоку, но в обозреваемой — он на верхней крышке. С обеих сторон есть по одному отверстию: направленное на валик имеет подвижные и легко открывающиеся «шторки», через которые мусор поступает во внутрь, в обратную сторону — открывающаяся за счёт сильного потока воздуха крышка на пружинах. Фильтр обозреваемого устройства — моющийся, как и сам контейнер. Использовать надо хорошо просушенный фильтр.

Станция самоочистки
На следующих фотографиях показана станция самоочистки. На ней есть кнопки управления. Под крышкой данл описание каждого элемента конструкции. Видны два бака для воды (чистой и грязной — справа налево), мешок для сбора мусора посередине между ними и оборотная стенка с креплением шнура электропитания.
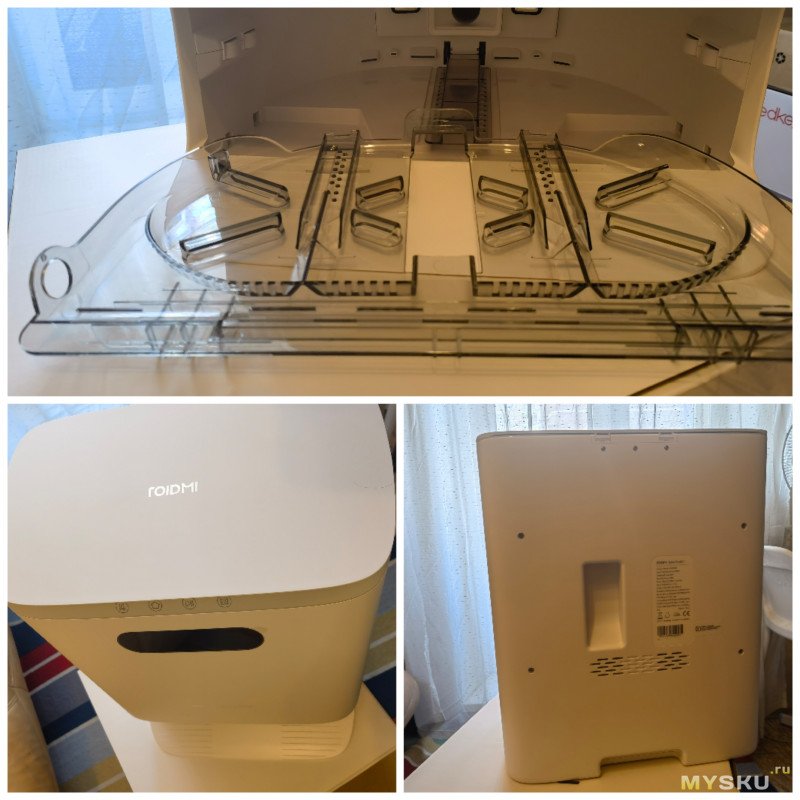
Подробно показаны фотографии вентилятора (посередине) и двух отверстий для баков чистой и гразяной воды (справа налево). Место для грязной воды имеет два клапана. В одном из клапанов установлен спонж для фильтрации. Дополнительный такой же есть в комплекте. Посередине находится отверстие с мотором.

Ёмкость баков для воды — по 4 л у каждого. Данного объёма, по моему использованию, будет хватать на 34-40 м². Поэтому придется менять воду часто, или пользоваться только сухой уборкой. Иными словами, получить из Roidmi Eva совершенно автономное устройство по влажной уборке квартиры не получится. Если запретить часто мочить трапки, то можно увеличить площадь мытья.
В месте установки робота есть пластмассовая подставка, которая предотвращает контакт модели с водой и скопившейся там грязью. Она вынимается, что облегчает уборку в этом месте. Не во всех полобных моделях-аналогах подкладка вытаскивается. Этотплюс, так как ее убобнее промывать, как если бы она была несъемной.
Технические характеристики:
- Модель: Roidmi Eva
- Тип уборки: сухая и влажная
- Движущийся механизм: две тряпки (180 раз/мин)
- Объём пылесборника: 220 мл
- Мощность разряжения — 3200Па
- Мытьё полов: под давлением, 12N
- Оценочная мощность всасывания: от 7 до 28 Вт
- Навигация: лидар (карты, запретные и зоны влажной уборки)
- Уровень шума: от 64 и до 101 дБ
- Датчик ковра: да
- Датчик перепада уровня: да
- Датчик движения вдоль стен: да
- Основная щётка: трехлучевая
- Валик: силиконовая основная щётка-валик с щетинками для выметания
- Преодоление порогов в 1,8 см
- Размеры: 330х330х106мм
- Подача воды: автоматическая промывка валиков через 6, 9 или 12 мин (в приложении)
- Самоочистка: мусора и тряпок
- Время самоочистки: 12 с
- Фильтр: сменный моющийся НЕРА-фильтр
- Объём ёмкости для воды: 4 л
- Аккумулятора: 5200mAh/14,8V
- Время заряда: 210 мин
- Разряд*: 70 м² влажной уборки, 125 м² сухой уборки
- Связь: Wi-Fi 2,4Ггц
- Вес: 4,2 кг робот и 9,8 кг станция
- Назначаемая очередность и мощность уборки
- Поддержка Алиса, Alexa, Google-ассистента
Приложение Mi Home
Пылесос работает как в приложении Mi Home, так и в Roidmi Cleaner. Я соединил его с приложением от Xiaomi. Ниже показан процесс настройки.
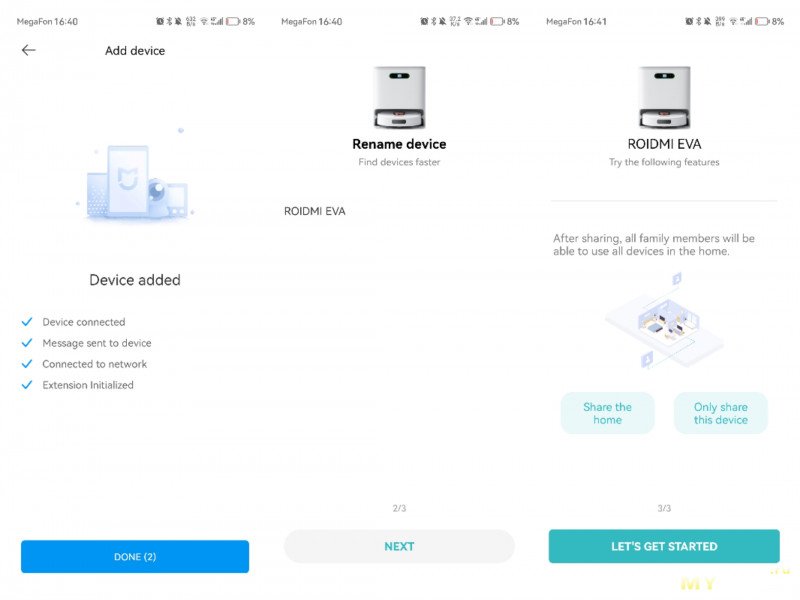
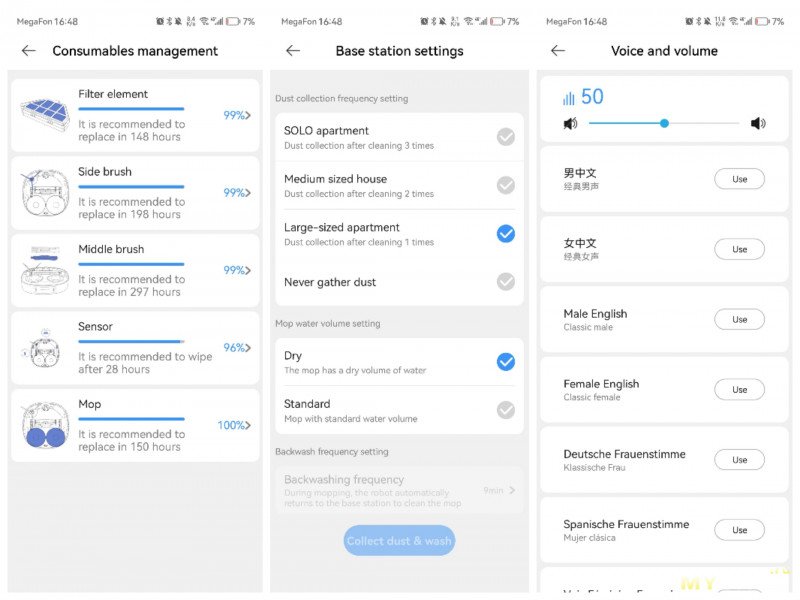
Приложение предложит небольшое ознакомление на выпадающих иконках. Оно поддерживает русский язык. Можно принудительно опустошить контейнер для мусора, когда модель находится в станции; начало или приостановка уборки; возврат на базу самоочистки; и дополнительные настройки.
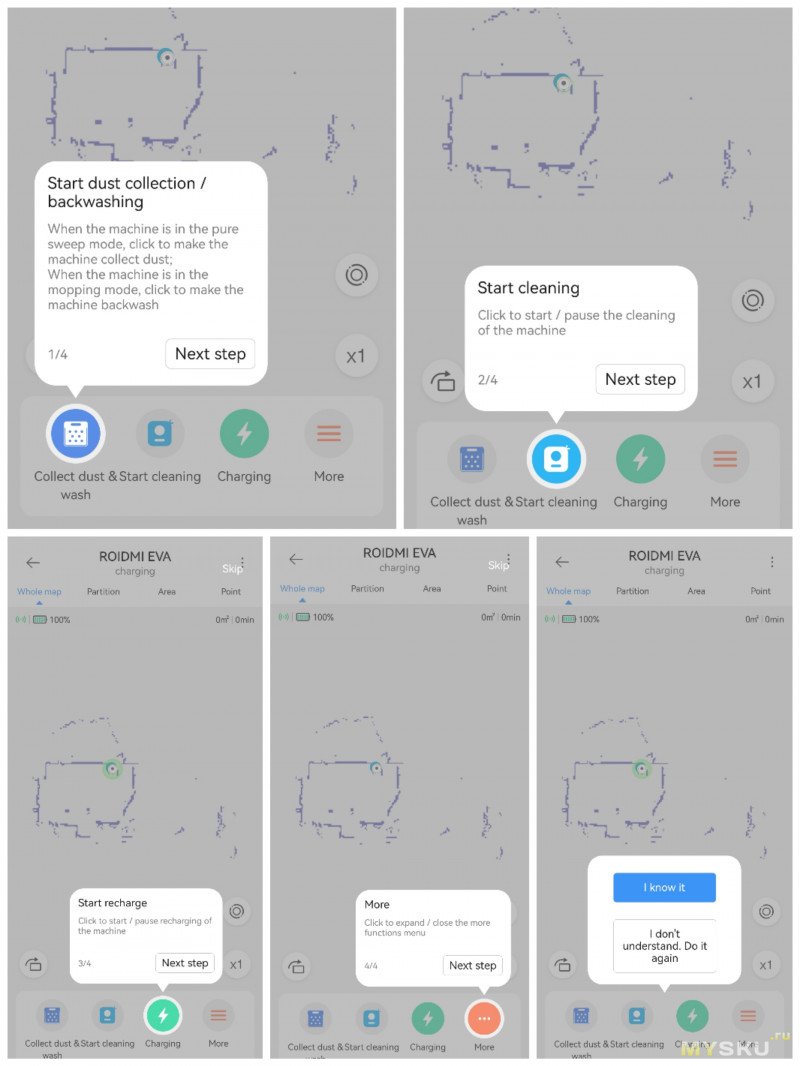
Ниже на фотографиях показаны опции, которые доступны в момент уборки. Можно вручную назначить уровень всасывания при сухой и сухой с влажной уборками. Если идёт влажная уборка, то ковровые покрытия избегаются, как было сказано ранее. Модель имеет датчик ковра, поэтому проехать с тряпками по нему если у удастся, то только в случае начала уборки с него (см. следующий раздел). В подменю с тремя линиями можно настроить зоны, виртуальные стены, уровни уборки (модель поддерживает несколько этажей, а следовательно и карт), назначить регулярную уборку, голосовое управление.
Настроек много и большая их часть определяется наличием лидара, который в моделях ценового сегмента обозреваемого — стандартный сопутствующий элемент.
Ниже показаны скриншоты результатов влажной и отдельно сухой уборок. На них видно, где находятся ковры, куда в первом случае не был осуществлён заезд, и общая зона уборки. Под кровать и часть площади за ней не была убрана, так как не смог он туда заехать. С количеством раз повторных действий данная зона была идентифицирована. Для просто сухой уборки Я снял вращающиеся тряпки.
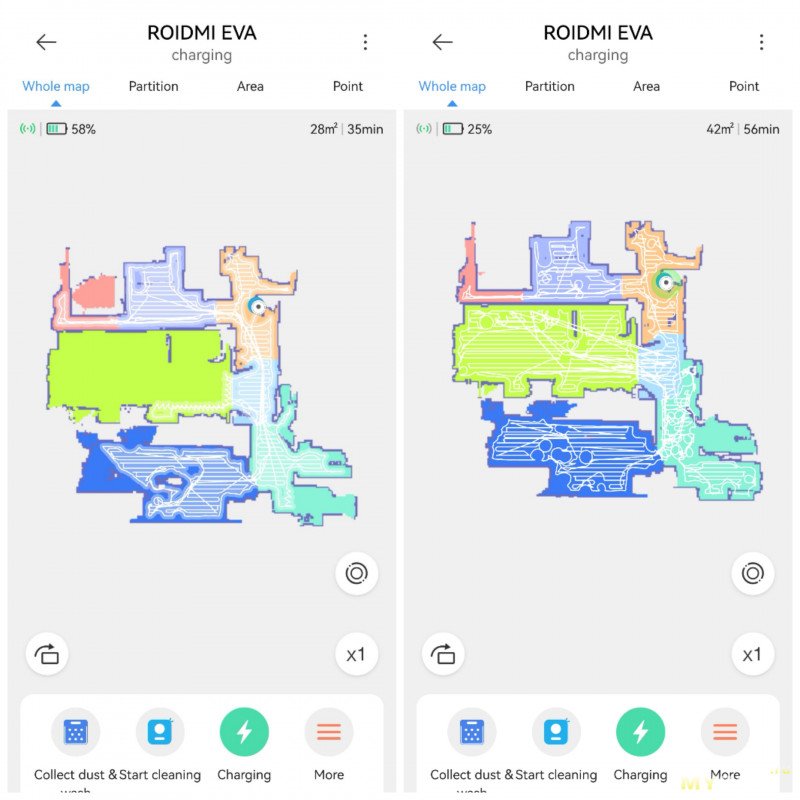
Видно, что для уборки 70 м² потратилось 75% заряда аккумулятора (в максимальном режиме всасывания в случае сухой уборки; влажная проходила только валиками, без всасывания). Если он разряжается до 20%, Eva едет на дозарядку, после которой продолжает уборку. На влажную и сухую уборку потратилось 42% аккумулятора, на просто сухую — дополнительно 33%. Во время промывки щеток, которых за 28 минут было 3 подхода, происходил заряд, но им можно пренебречь для оценки скорости разряда. Получается, что 100% ёмкости аккумулятора будет хватать* на 70 м² сухой и влажной уборки и 125 м² сухой уборки. Цифры получены с учётом, что при 80% разряженная модель возвращается на дозарядку. Такой показатель соответствует другим моделям с подобной и большей силой разряжения.
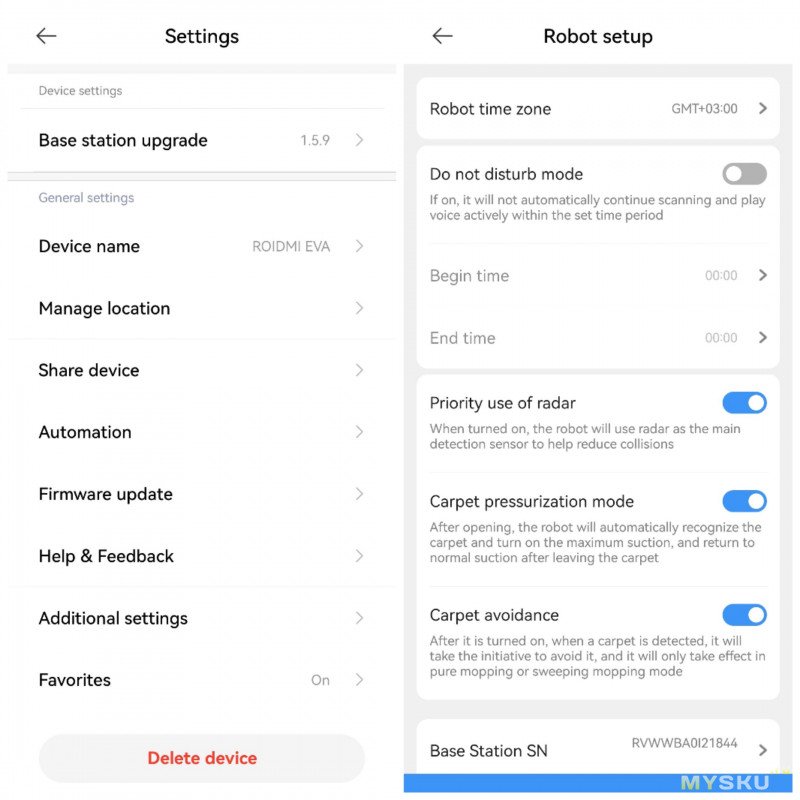
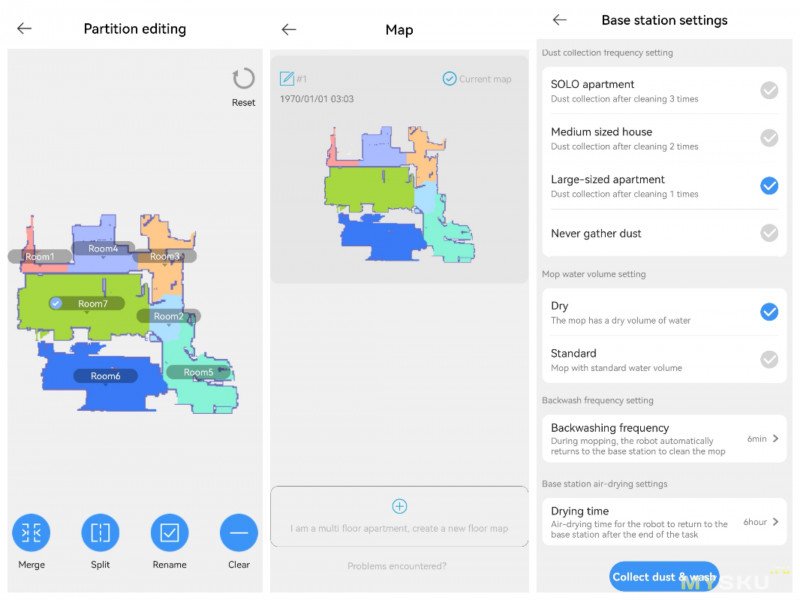
Ниже показаны скриншоты настроек зон, которые автоматически определились роботом после первой уборки. Можно объединить, переименовать, создать зоны. В случае работы на нескольких этажах, их можно добавить в этом подменю. К другим настройкам относятся: количество раз опустошения бака для разных площадей и степень влажности салфетки. Для паркета лучше оставить значение «Сухая» (Dry), но для других типов — использовать «Стандартное».
Уборка
Робот-пылесос
На следующей анимации показан загибающийся механизм крышки валика. С его помощью происходит очистка ворсинок. По факту, намотанный мусор есть, но или у меня его мало, или из-за силиконового валика и названного механизма очистки вкупе с большой мощностью всасывания, его не так много.

Датчики препятствий находятся на передней панели пылесоса. Механизм из лазеров для определения препятствий работает не очень хорошо: высокие предметы робот объезжает, но низкие — нет. В этом плане Eva не дотягивает до уровня топ-моделей от Dreame и Roborock.

Высота модели достаточно большая (106 мм), поэтому об уборке под кроватью не может быть и речи. Решение вопроса только одно — поднимать корпус кровати и запускать туда робот-пылесос.

На следующей замедленной анимации показано, как крутятся щетки. По замедленному видео, с помощью которого получена анимация, Я примерно насчитал 20 оборотов тряпки за 7 секунд. Поэтому частота вращений должна быть около 180 раз/мин, что как раз соответствует цифре в инструкции. Щетки касаются пола с помощью пружины, которая оказывает на поверхность давление 12N (то есть 1,22 кг). Щетки выполнены из антибактериального материала.
В модели Roborock S7 (обзор здесь) применяется «движущаяся щётка», которая совершает до 3000 колебаний в минуту. Оценочный показатель Roidmi Eva много меньше, поэтому оттирать въевшиеся загрязнения последнему будет труднее, но сила, с которой тряпки давят на поверхность — в два раза больше, чес у S7 (и у S8, в частности), пожтому они примерно одинаково должны будут выполнять свою работу.
Анимация уборки засохшего кетчупа (засыхал в течение 20 часов) показывает, что робот-пылесос не справляется с такими пятнами, но кетчупа было очень много, в других обзорах грязь не является сухой или ее в разы меньше. Поэтому для нормальной уборки грязи с помощью Roidmi Eva не надо ждать, а делать это быстрее. Если прибегать к зональной уборке, то количество проходов ограничено цифрой 2, после чего тряпки будут споласкиваться на базе.

Модель не сможет убираться с крутящимися щетками на ковре. Если база была на нем, то робот-пылесос не сможет к ней вернуться, а каждый раз будет останавливаться на линии пересечения ковра и пола. Попытка возврата продолжалась довольно долго. Переставил базу в новое место, но пылесос все равно хотел попасть на ковер, наверное думал, что база оставалась все ещё там, откуда он с нее выкхал. Это самый большой недочет, который обнаружил за время использования. Другие ошибки были схожего типа:
- Робот мыл пол, но вода закончилась, после добавления воды, уборка не возобновилась автоматически
- Была обнаружена новая зона, уборка дошла до возврата на базу, но из-за трёх стен на ограниченном пространстве база потерялась
- Если при уборке была закрыта дверь в комнату, а потом надо убраться в определенной зоне этой комнаты, робот начнет промывку тряпок, уедит со станции, но потом скажет, что область не может быть достигнута, вернёся на станцию и снова начнет мыть тряпки (решается увеличением области промывки или надо, чтобы Eva подъехал, увидел, нет стены, опять промыл тряпки и начал, наконец, уборку).
Во время уборки пылесос автоматически увеличивает мощность всасывания на ковре. Наличие датчика ковра стало уже нормой, тем более для топовых решений и роботов-пылесосов со станцией самоочистки. Roidmi Eva имеет такой датчик. На анимации видно, что уровень шума уменьшается с 75 до 59 дБ после съезда с ковра. Пылесос выполнял уборку и не управлялся мной в этот момент.

На следующих фотографиях выделил особенности модели. Тряпки крутятся довольно быстро. На второй фотографии видно, что после первой уборки тряпки не очень грязные, то есть можно промывать не после одного цикла уборок. Промывка на станции работает хорошо, такие тряпки можно использовать не один раз до ручной промывки.
На третьей фотографии показал уборку модели в местах трёх перепадов высот. Roborock S7 на этом же самом месте, как показано на фотографии, застревал, появлялась ошибка, самостоятельно он выбраться из ловушки не мог. Roidmi Eva подобной проблемы не испытывал. Также он хорошо и без наматывания на основную щётку справляется с большим ворсом ковра (четвертая фотография). На пятой фотографии показан валик после уборки. Намотанного мусора на нем не так много. Он хорошо очищается с используемым прижимным механизмом.

В характеристиках сказано, что робот преодолевает препятствия в 1,8 см. В большинстве других моделей такой показатель немного больше — 2 см. На следующей анимации показано, что роботу-пылесосу было сложно преодолевать пороги сушилки.

Диаметр в месте изгибов за счёт дополнительных накладок, составляет 2,3 см. Диаметр самой ножки — 1,6 см. Вторые он проезжал, но не мог предолеть первые. При уборке в квартире стоит поднимать сушилку, чтобы Eva мог убраться под ней. По факту модель, как и аналоги, способна преодолеть «пороги» выше заявленного.

Немаловажной особенностью уборки роботов-пылесосов выступают шторы и занавески: на сколько низко они опущены и как сильно касаются пола, чтобы их не зажевали. Roidmi Eva не засосал ни тюль, ни штору во время уборки.

Станция самоочистки
Станция самоочистки выделяет модель из среднего класса устройств с подобным аксессуаром и приближает к следующему, немного дороже. Анимация необходимости налить чистую воду в контейнер показана ниже. Сопровождающих действия станции анимаций — несколько, каждый раз разная на экране.
Далее показаны остальные процессы, которые сопровождаются анимациями на экране. К ним относятся:
- Установка контейнера с водой в станцию
- Заряд аккумулятора
- Промывка тряпок
- Выполнение уборки
- Всасывание мусора из робота-пылесоса в мешок внутри станции самоочистки

На анимации ниже видно, что на достаточно большой территории Eva заезжает издалека на станцию. Достаточно порядка 1 м, чтобы робот мог спокойной вернуться на станцию. Устанавливать базу в углах или труднодоступных местах не стоит: не факт, что если он выехал со станции, он сможет на нее вернуться. В инструкции сказано, что необходимо по 0,5 м справа и слева от станции и 1,5 м перед ней свободного пространства.
Фотография робота-пылесоса Eva в работе. По анимации на экране станции самоочистки можно понять, что Eva находится в процессе уборки.

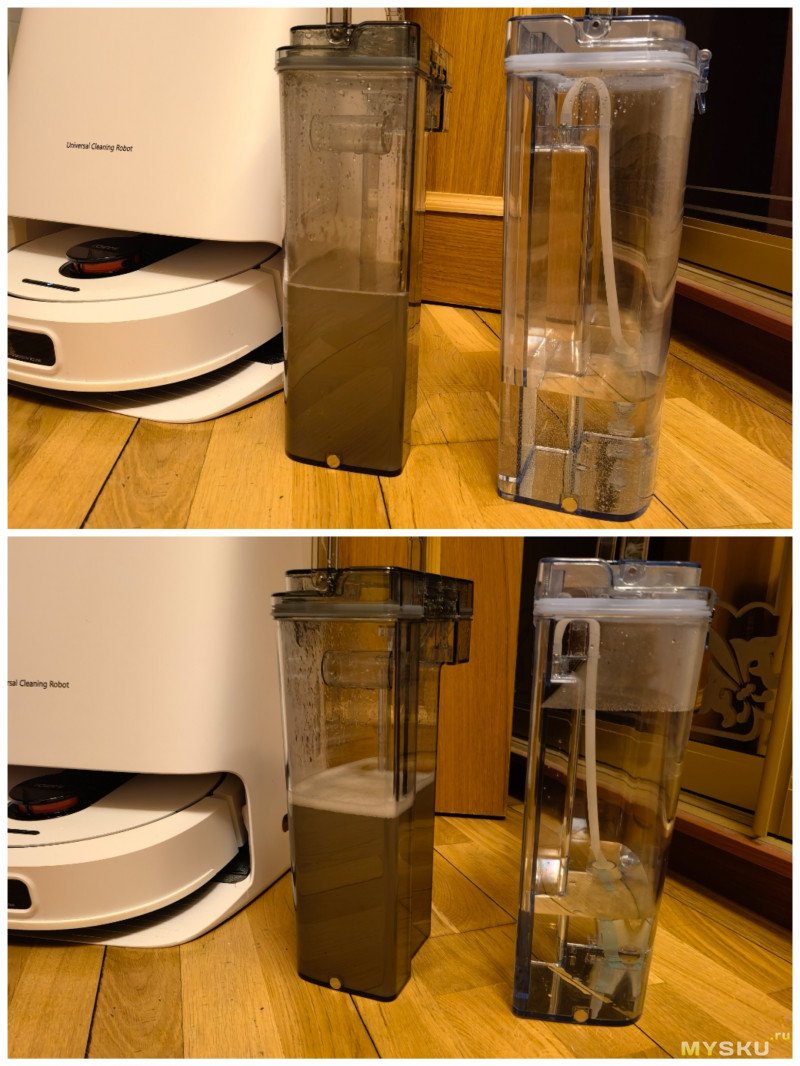
Как уже отмечалось, расход воды у тряпок большой. На фотографиях ниже показаны, сколько останется воды, если тряпки будут смачиваться и промываться раз в 12 минут. За 28 минут влажной и сухой уборки расходуется примерно 70% бака для чистой воды. Советую наливать воду в бак «под самый край», а не оставлять зазоров, иначе хватит воды на меньшее количество раз. На второй фотографии показано, сколько воды остаётся, если тряпки будут промываться каждые 6 минут при одинаковой площади в каждом из двух случаев. Видно, что воды расходуется примерно на 15% больше во втором случае. В единицах площади разность между двумя режимами — 40 и 34 м² примерно.
Шум
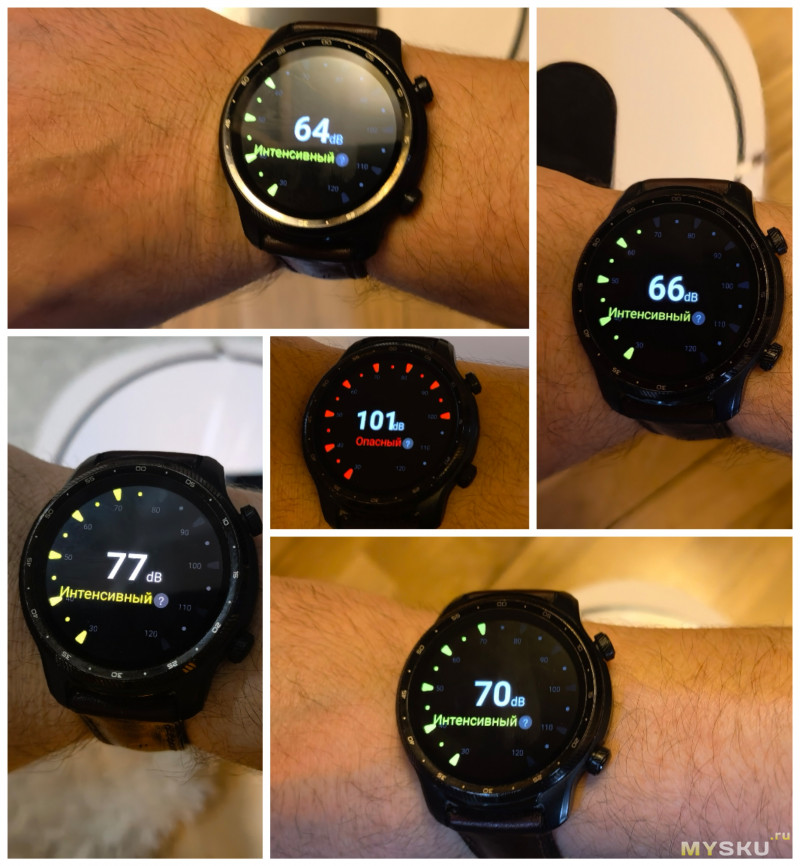
Во время уборки шума от робота-пылесоса не слышно. Если уборка проходит в дальней комнате (не рядом с вами) на максимальной мощности, то вы или не услышите его, или слегка будете слышать шорох. Уровень шума для разных режимов работы, как и работы станции самоочистки, следующий:
- Шум в тихом режиме — 64 дБ
- Шум в минимальном режиме — 66 дБ
- Шум в среднем режиме — 70 дБ
- Шум в максимальном режиме — 77 дБ
- Шум станции самоочистки — 101 дБ
На фотографиях показаны названные максимальные значения шума.
Оценка мощности всасывания
Робот-пылесос
Аэроватты — это мощность, необходимая для создания перепада давления в 1 Паскаль (Па) при воздушном потоке в 1 кубический метр в секунду (м³/с). Аэроватты практически равны Ваттам, коэффициент 0,9983 к первым, поэтому в дальнейшем два показателя будут идентичны.
Для оценки мощности всасывания надо знать полезную площадь всасывания (м²), разряжение (Па), скорость потока воздуха (м/с) и перемножить все три величины. Эффективная площадь будет оцениваться по формуле площади. Уровень создаваемого разряжения будет оценен при помощи анеиометра далее по специальному подходу.
Дальнейшая оценка параметров производится по четырем режимам: тихому, минимальному, среднему и максимальному. Оценивать параметры будем на поверхности всасывания на уровне основной щетки за вычетом площади, занимаемой этой щеткой. Площадь всасывания равняется (0,1483*0,032-0,1483*0,0142≈) 0,00264 м².

Скорость потока воздуха оценивалась следующим образом: анемометр считал максимальный поток воздуха, прибор ставился под пылесос в режиме уборки (а не позиционирования) и через несколько секунд он аккуратно доставался из под Roidmi Eva. В итоге получились следующие показатели:
- Тихий режим — 14,5 м/с
- Минимальный режим — 14,8 м/с
- Средний режим — 15,5 м/с
- Максимальный режим — 16,7 м/с

Определение разряжения Roidmi Eva
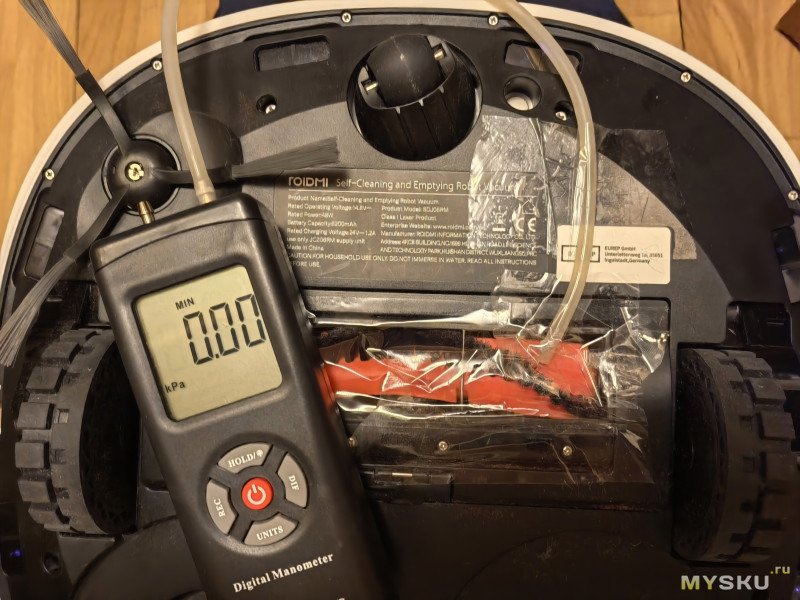
Для оценки показателя поверхность всасывания была заклеена скотчем, кгторый держал трубку прибора на уровне плоскости всасывания.
Для каждого из четырех режимов получился следующий результат:
- Тихий режим — 190 Па
- Минимальный режим — 260 Па
- Средний сежим — 410 Па
- Максимальный режим — 630 Па

Перемелжая все три показателя, получаем, мощность всасывания Roidmi Eva равна:
- Тихий режим — 7,27 Вт
- Минимальный режим — 10,16 Вт
- Средний режим — 16,68 Вт
- Максимальный режим — 27,78 Вт
Станция самоочистки
Для получения аналогичных данных в случае станции самоочистки робота-пылесоса Roidmi Eva пришлось прибегнуть к некоторым ухищрениям, но они не меняют, а повторяют суть подхода в случае станции вертикального пылесоса. Станция работает только при установленном в ней роботе. Для фиксации области всасывания использовался скотч. Такая манипуляция дают возможность сравнить разряжение (и — далее по тексту — потока воздуха) с аналогичным показателем в случае разных пылесосов.
На контейнере для сбора мусора есть крышка. Она открывается потоком воздуха от станции при высасывании мусора. Мощность большая при этом должна быть.
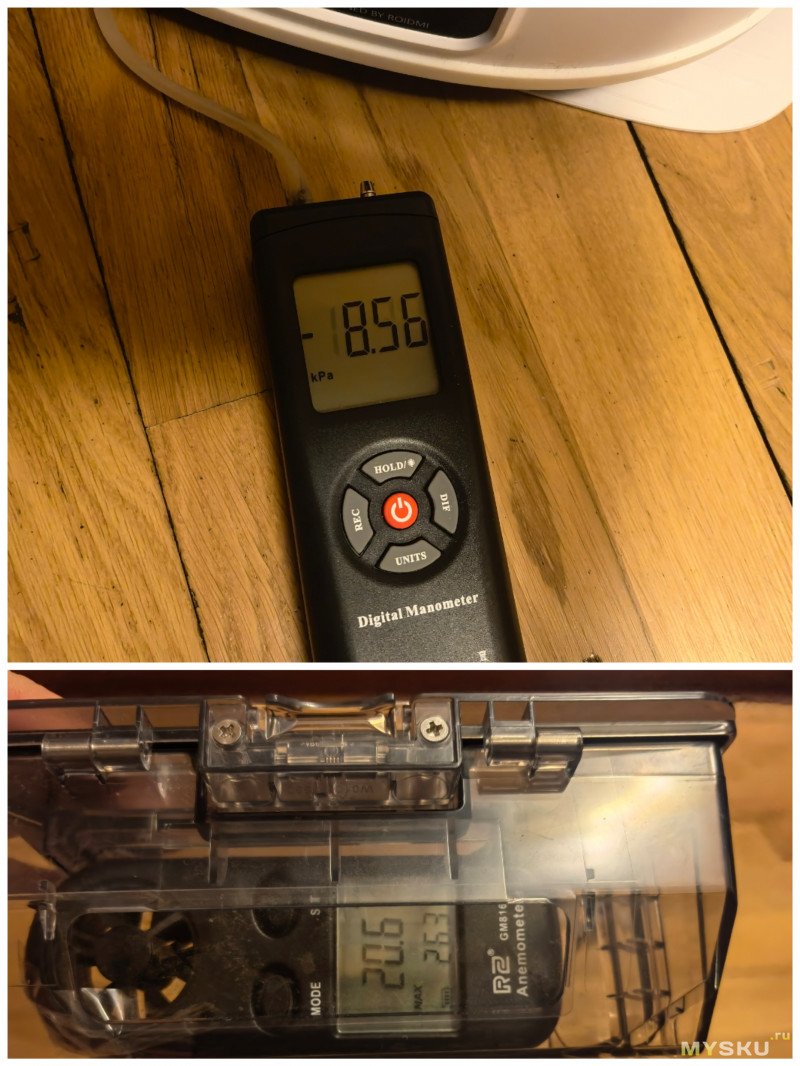
Оценка разряжения происходила через удлиненную трубку, связанную скотчем (под рукой переходника не нашлось). Трубка вставлялась в контейнер для сбора мусора через отверстие валика. Далее фиксировалась скотчем перед открывающимся отверстие для всасывания мусора станцией. Робот устанавливался в станцию, включался режим самоочистки. Оценочное разряжение станции самоочистки — 8560 Па. Цифра доходила до 10-12 кПа, но большее время колебалась около 8 кПа.
Подобным способом оценивался поток воздуха: анемометр находился в контейнере для сбора мусора в зафиксированном состоянии скотчем в момент активной опции, площадь вокруг него была ограничена скотчем для создания приближенных к реальным условий. Такой подход даёт возможность сравнить итог с ранее полученным в других обзорах. Поток воздуха станции самоочистки равен 20,6 м/с.
Площадь всасывания — площадь прямоугольного отверстия контейнера. Площадь всасывания станции самоочистки равна (0,0405*0,0165≈) 0,0006683 м². Ниже показаны фотографии, как это происходило.

На коллаже ниже показан процесс оценки разряжения и потока воздуха станцией самоочистки робота-пылесоса.
Итого получилось, что мощность всасывания станции самоочистки Roidmi Eva равна 117,85 Вт. Цифра практичечки в пять раз больше, чем на максимальном режиме уборки. Неудивительно, что с такой мощностью шум от станции очень громкий.
В итоге получилось, что при номинальном разяржении в 3200 Па оценочная мощность всасывания находится в интервале от 7 до 28 Вт. В случае робота-пылесоса Roborock S8 (обзор здесь) номинальное разрежение практичечки в два раза больше — 6000 Па, можность всасывания больше примерно на 30% (от 20 до 39 Вт). Иными словами, модель Roidmi Eva сравнимо хорошо собирает мусор, как и топовые решения с увкличенным разряжением.
Вывод
Основной вывод следующий: у пылесоса важны все параметры: чем они больше, тем лучше проходит уборка. В результате представленных расчетов, Roidmi Eva обладает меньшей, но сравнимой мощностью всасывания с Roborock S8. Резонно предположить, что на месте S8 может быть любая другая модель робота-пылесоса с номинальным разряжением в 6000 Па.
Модель имект две вращающиеся тряпки, которые выступают за край корпуса, что лучше способствует вычищению мусора из углов. После, или во время уборки, тряпки промываются, что гарантирует постоянную чистоту помещения. Также они просушиваются, но только холодным воздухом, пожтому участие человека с моделью сводится к минимому: заменить тряпки, налить воды, выброситььмусор из мешка через примерно 1-1,5 использования пылесоса.
У Roidmi Eva приличное количество аксессуаров в базовой комплектации, в частности есть сменные салфетки и много мешков для мусора. Станция самоочистки — это другое восприятие процесса уборки. С ней вы не отвлекаетечь на опустошение контейнера, промывку тряпок во время уборки. Настройки приложения (Mi Home, в случае обзора) позволяют тщательно планировать и управлять всем процессом. В этом и состоит большое преимущество Roidmi Eva перед конкурентами.
На Яндекс.Маркете доступен купон SKIDKA5 на 1000 руб., который снижает цену робота-пылесоса.
| +53 |
3442
81
|
Моющий, плюс очистка пылесборника, и в 1.5 раза дешевле. Ссылка на то, что брал себе. В работе пол года. Откровенный поросей в квартире нет, поэтому с нового года ни разу не делалась ручная уборка, кроме кухни пару раз, и мест, куда робот не пролазит.
Есть модель постарше, с подключением к водопроводу, но с ней не сталкивался, поэтому не буду советовать.
Котики делают сами, а нанимают для грязной работы совсем другие виды.
Если самые главные усвоит (одевать/надевать,… ться/тся и так далее) вообще от человека не отличите :)
P.S. С таким ценником, он как минимум должен уметь гладить и стирать )
ходитькататься в магаз. И сигареты стрелять у прохожих. ;)А почему здесь только промо-обзоры? — вопрос неправильный. Лучше спросите, почему нет обзоров «за кровные». Предположим вы купили дорогую вещь (телевизор, бытовую технику, оборудование, тот же пылесос, неважно). — вы сделаете на это подробный обзор? будете делать кучу фото и писать текст, при этом не ожидая ничего взамен? Думаю, вряд ли. Точно также рассуждают и остальные.
Правда покупать «не сносив» старого робота, не стал бы ещё долго. Обзор на купленного в офлайне роборок с5 я не делал. А вот если бы кто предложил махнуть робота на обзор — я бы с радостью, крошки бы рассыпал, крупу, грязь бы размазывал.
А химию — жена не настолько пол запускает, чтобы химией отмывать.
По полу ребёнок малой ползает. И размазывать грязь роботом — себя не уважать.
Это полтора года за 80 000р. И поверьте, вымоет намного лучше, чем эта игрушка. А больше чем полтора года не проработает по 2 раза в неделю. Моторчики раньше рассыпятся.
У уборщицы другие достоинства, например, перестелить постели, помыть окна, пропылесосить диваны. С тем чтобы всегда был чистый пол, справится и, как вы говорите с упорством, достойным лучшего применения, «такая игрушка».
А стоимость периодического клининга она от 2000 за сеанс только начинается. Причём это старую цену называю, когда заказывал (и кажется, это уже частным клинерам, от сетей 2500), годика три назад ещё до ковида, сейчас на сайтах везде цена спрятана и предлагается расчёт в зависимости от.
А вы размазывайте грязь роботом, вам да, так дешевле.
А военным ещё боевые премии доплачивают, всё у них нормально с оплатой за риск. Знакомый сейчас в госпитале отлежится (за что ему платят, в отличие от клинеров у которых заболел — соси лапу) и говорит, снова поедет.
Так и клинер на окладе может зарабатывать 40 и никуда не деваться, но платить за услуги его работодателю всё ещё 2500 за сеанс.
При выборе робота-пылесоса лучше смотреть на модели с большей силой всасывания, чем искать компромисс цены, базы для высасывания мусора или вложенной уборкой.
Моющий пылесос (ручной) тоже это делвет, и моющий робот должен бы тоже. Не путать моющих роботов с роботами к которым прикрутили тряпочку без возможности её обновлять.
То же самое делает робот-пылесос — размазывает грязь, собирает её на тряпочку, после чего эта тряпочка кидается в стиралку, пока робот бегает со следующей. Да, тряпочка меньше, площади больше, но принцип абсолютно тот же.
Моющий пылесос, собирающий грязную воду в отдельный бак — это другое дело, плюс, он очень далёк от «нормальной уборки», потому что моющих пылесосов очень мало. И как пользователь такого, который потом избавился и перекрестился, имею предположения почему.
Робот-пылесос в глубокой теории «мог бы», а отнюдь не «должен». Но по куче объективных причин так не делает. Впрочем, у своего робота я очень рад тряпочке, которая каждый день моет пол самым нормальным и традиционным способом.
Но вот пол в тех местах где что-нибудь упало и размазалось так и будет всё грязнее и грязнее пока его не почистят сменяя воду по загрязнению, а не по освящённой в веках традиции, аминь.
Не знаю как у вас, но у меня, если что-то размазалось и я беру обычную тряпку и это дело оттираю, то тряпка становится грязнее, там где тру — чище. И то же самое делает робот-пылесос.
Но если мозги останавливаются на привычном «тряпка грязнее, пол чище», то ничего уже не объяснить. Вот мазнули бы вас грязной тряпкой в детстве и может быть сегодня мозг бы включался, что тряпка может и пачкать.
Вариация приема спецолимпиады «мне так жаль».
Ещё один приём спецолимпиады — намёк на то, что собеседник тупой, а вы д'Артаньян. Фу таким быть.
Если бы вы «включили мозг», то внезапно поняли бы, что в той или иной степени тряпка пачкает всегда. Другое дело, что пол становится чище. Потому что функция тряпки — доносить в нужное место воду и моющее средство, а потом собирать всё. Эффект мытья достигается тем, что грязь очень охотно остаётся не на гладкой поверхности пола, а на ткани или микрофибре.
Не знаю, для чего вы эту фотку запостили. Собачью какаху можно и даже очень просто развести даже обычной тряпкой. И с ней бы сделала даже Скуба, у которой та же система с двумя баками для чистой и грязной воды, что и у моющего пылесоса.
Обычно — да. Потому что в руках большая тряпка и много впитывает. А ёмкость у тряпочки робота очень маленькая. В результате она очень быстро становится грязнее пола и далее уже не чистит, а пачкает.
Опять мышление в стиле «природа не терпит пустоты» на основе опыта. Но дело элементарно в том, что грязь впитывается в толщу ткани (особенно с использованием воды), и ёмкость метра ткани получается равной нескольким метрам пола, а у микрофибры ещё выше. Как только ёмкость в массе получила тот же уровень загрязнения что пол — всё, дальше бессмысленно её использовать. В результате с использованием клочка микрофибры на роботе без автообновления, происходит чистка разве что совести.
У меня знаете ли есть робот с таким клочком, и я имел возможность трезво сравнить, происходит ли дополнительная чистка с ней или нет.
А вы подумайте, подумайте. Может быть даже про режим «чистка особо грязных участков» у тех же роботов вспомните. А то и если прям повезёт — сообразите, для чего он используется.
Да, приблизительно так работает вся домашняя автоматизация. Стиралка, посудомойка, робот-пылесос, робот-стекломой, автоматическая газонокосился, нужное вписать.
у меня такой полгода. Во первых — тряпка на моем — одна и не двигается. то есть ее максимум — «подтереть пыль». Практически не использую в итоге. Но две крутящиеся тряпочки как в обзоре — интереснее. У меня кстати тряпка крепится на контейнер для мусора и оттуда же «поливается» водой (а чаще — не поливается вовсе)
Во вторых — контейнер для пыли достаточный на одну уборку, в конце мусор высасывается в хб-мешок на станции. Мешка хватает месяца на три, я купил еще пачку. Крайне удобно, позволяет обслуживать робота раз в неделю от волос и прочего. Но крупный мусор иногда застревает. И да, контейнер с собой у него визуально больше и фильтр тоже больше. Кажется, шире щетка, схема устройства другая
в третьих — у моего две лапки-щеточки. И это был повод выбрать именно его по мнению жены.
А так хотелось бы где нибудь кроме приложения робота иметь возможность убирать конкретную комнату Это если нас тут читают представители компании)
В остальном согласен с вами.
Ну к воде допустим я и сам через поплавковый клапан могу подключит… тут проблем нет.
Но вот как это чудо подключить к каналези???
Если ставить простой перелив, то забор грязной воды с тряпок осуществлятся небудет(((( Так как он там осуществляется через всас воздуха из контейнера, и если подключить перелив то тупо будет из канашки воздух сосать… Обратные клапана работать не будут, так как быстро забются грязью((((( и начнут пропускать воздух… Можно конешно поставить овносос, но он в габарите самой станции…
З.Ы. В новых проектах часных домов, стали попадаться ниши в стенах для станций самоочистки пыликов, с подведеной розеткой… На мой взгляд оч грамотно, так как габарит пылик+станция по полу прилично занимает площадь…
Я как раз начал задумываться, что такие ниши теперь можно в домах при ремонте делать, а их уже делают. Быстро приноровились.
бытовые — пока что, вроде бы, нету.