Ломаем еще один квадрик: вандализация с элементами реверс-инжиниринга
Уже давненько я описывал внутренности одного квадрика, старая статья здесь.
Воды с тех пор много утекло, я обещался написать цель реверса, да так и не собрался. Тем более, проект просто заглох — я хотел сделать игрушку-дирижабль на базе квадрика, но гелий оказалось купить непросто — большие баллоны дорогие, а маленькие никто поблизости не продавал. Возиться с водородом — судьбу Гинденбурга повторять не хотелось.
Тем не менее, протокол был вскрыт более глубоко, разобрался, как биндинг работает. Удалось запустить digital motion processor MPU-6050 малой кровью — та библиотека, которой все сейчас пользуются, дюже толстая.
И все это потом использовалось для управления пенопластовым самолетиком, которым на Али барыжат дешевле, чем за два евро. Вы мне потом напомните? — я все это расскажу в следующий раз.
Недавно на почту с Али упала реклама — кто-то продавал квадрик с бесщеточными моторами, с избеганием препятствий и камерой с разрешением 100500К. И за все про все просили 15 евро.
-Да, Холмс, но… как это возможно?
Посмотрел на том же Али — действительно, продают запасные платы к таким квадрикам, на которых собраны 4 ESC для управления двигателями.

Квадрик мне с моим состоянием здоровья нужен, как рыбе зонтик — запустить я его все равно не смогу. Но как все это сделано уж больно интересно было, тем более в интернетах ничего не нашлось.
Как и следовало ожидать, чуда не произошло. Дело в том, что продается модель E99s, богатая на плюшки и более простые модели с почти таким же названием. Пришла же самая дешевая модель, хотя в описании продавец накопипастил про самую навороченную.

Хотел написать продавцу — «Борис, ты не прав». Но, похоже, на Али очередные перемены. Пообщаться в продавцом не удалось — не успел нажать кнопку для отправки сообщения, вылезло сообщение от Али — мы уже все решили и вернем тебе больше половины уплаченной суммы. А я распинался, душевное письмо писал… А этот бездушный автомат…
Ну как в анекдоте — «а поцеловать?»
Тем не менее, в этом квадрике нашлась одна интересная фишка, которой можно пользоваться для своих мирных целей и она почему-то никем не описана. По крайней мере гугл не помог.
Но давайте все-таки по порядку. Во-первых, чем это поделие отличается от дешевых наладонных квадриков, которые уже десяток лет выпускаются? Поставили датчик давления, который позволяет очень эффективно держать высоту. Ну и камеру, общающуюся по WiFi добавили.
Все это хозяйство приходит в сумочке — мелочь, а приятно.

Сам коптер в сборе весит около 94 грамм. Из них около 9 грамм камера и около 19 грамм батарейка. Судя по весу, обман с ее емкость не такой и большой — всего в 2-3 раза (декларировано 1800 мАч).

Оставим камеру на сладкое, а пока посмотрим что у самой игрушки внутрях.
Дешевые коллекторные моторчики на раскладных «руках», глазки-светодиодики и плата управления.

На верхней стороне платы, помимо прочей ерунды, установлена микросхема IMU — гироскоп и акселерометр в одном лице, что конкретно за зверь — по маркировке мне опознать не удалось. Рядом — датчик давления, тот самый, который позволяет автоматически поддерживать высоту полета. Скорее всего, произведен NXP, очень напоминает древний MPL115A2, но, определенно, что-то более свежее.

Из интересного на другой стороне платы — микроконтроллер из китайской серии «аналогофнет» без маркировки и трансивер. Я бы сказал, что это XN297LBW, но ключ почему-то на другой стороне. Ох уж эта загадочная китайская душа!

Надо отдать должное, эта XN297LBW имеет значительно большую выходную мощность по сравнению с nRF24L01, функциональным аналогом которой она вроде бы является — 13 dBm (20 мВт) против 0 dBm (1 мВт). Прямо их заменять не получится, преамбулы у них разные и у XN297L есть несколько недокументированных регистров. XN297 по ножкам и подключению совпадает с nRF24L01, а у XN297L столько внешних компонентов уже не требуется, что позволило ее упаковать в 8-ногий корпус — XN297LBW. Только обычный 4-проводной SPI пришлось поменять на 3-проводной.
Ничего больше интересного нет, и системы обнаружения препятствий не обнаружено.
Теоретически она простая, один инфракрасный приемник и несколько инфракрасных светодиодов, переключающихся один за другим. Но дьявол всегда в деталях, хотелось бы посмотреть, как это реально сделано. Но смотреть не на что.
Разъем для подключения камеры трехвыводный. Два — питания и еще один — последовательный интерфейс. А вот это интересно, и копнем чуть глубже, может пригодиться, например, для внешнего управления квадриком или целой стаей таковых.
Теперь займемся камерой.
Плата внутри корпуса болтается никак не закрепленная. На ней какой-то микроконтроллер, скорее всего разработан для систем видеонаблюдения.

Один разъем припаян, к нему подключена камера. Скорее всего, разрешение не лучше VGA. Есть место под второй разъем для камеры — у каких-то дронов установлено две камеры, одна смотрит вперед, вторая вниз.
При включении питания появляется открытая сеть.




И еще есть скрытый IP, который никогда не отвечает:
Может можно что-то увидеть с помощью обычно браузера, но дальше разбираться было в лом — вроде как и не нужно.
Сеть поддерживает единственное соединение, что сильно усложняет исследование — просматривать все нужно с телефона.
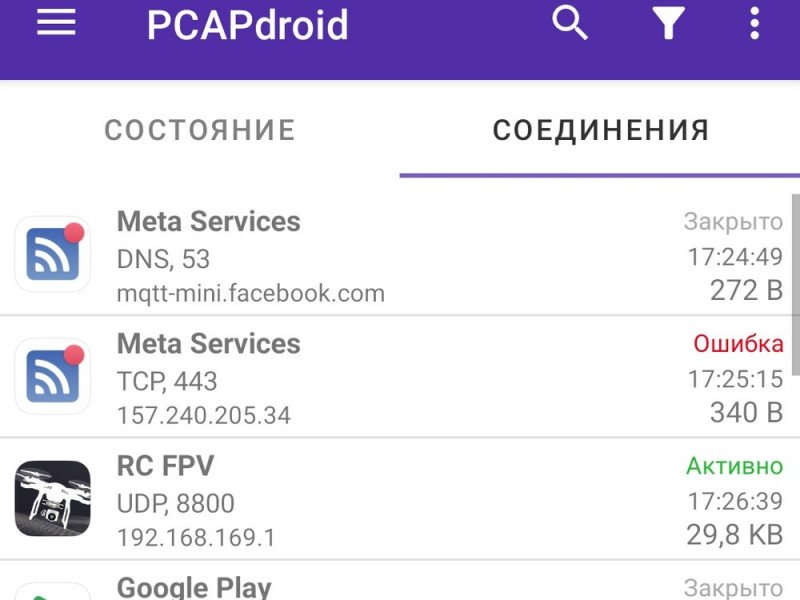
Теперь скачиваем приложение RC FPV для телефона, подключаем телефон к новообразовавшейся сети и запускаем приложение. Видим изображение с камеры и на этом фоне элементы управления.

При этом на выходе TX появляются импульсы. Вот это нам и нужно.

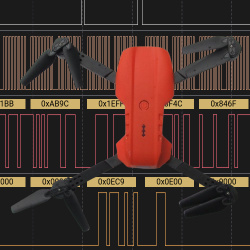
Подключаем логический анализатор и видим, что у нас простейший асинхронный интерфейс 19200 бод. С частотой 50 Герц идут пачки импульсов, стартовый импульс 0х66, завершающий — 0х99, предпоследний — контрольная сумма. Между ними — 5 байт данных.


Четыре я расписал, а последний ведет себя как-то странно — обычно это нуль, но время от времени проскакивают какие-то битики. Зачем — не знаю, но того, что уже нашлось, вполне достаточно. Ниже я разрисовал что и для чего нужно. Не обессудьте, если что перепутал местами.

Можно вместо камеры поставить какой-нибудь ESP и его помощью контролировать полет квадрика.
Думаю, этой информации достаточно, чтобы запускать свою стаю дронов, используя дешевые квадрики, как заготовки.
Воды с тех пор много утекло, я обещался написать цель реверса, да так и не собрался. Тем более, проект просто заглох — я хотел сделать игрушку-дирижабль на базе квадрика, но гелий оказалось купить непросто — большие баллоны дорогие, а маленькие никто поблизости не продавал. Возиться с водородом — судьбу Гинденбурга повторять не хотелось.
Тем не менее, протокол был вскрыт более глубоко, разобрался, как биндинг работает. Удалось запустить digital motion processor MPU-6050 малой кровью — та библиотека, которой все сейчас пользуются, дюже толстая.
И все это потом использовалось для управления пенопластовым самолетиком, которым на Али барыжат дешевле, чем за два евро. Вы мне потом напомните? — я все это расскажу в следующий раз.
Недавно на почту с Али упала реклама — кто-то продавал квадрик с бесщеточными моторами, с избеганием препятствий и камерой с разрешением 100500К. И за все про все просили 15 евро.
-Да, Холмс, но… как это возможно?
Посмотрел на том же Али — действительно, продают запасные платы к таким квадрикам, на которых собраны 4 ESC для управления двигателями.
Квадрик мне с моим состоянием здоровья нужен, как рыбе зонтик — запустить я его все равно не смогу. Но как все это сделано уж больно интересно было, тем более в интернетах ничего не нашлось.
Как и следовало ожидать, чуда не произошло. Дело в том, что продается модель E99s, богатая на плюшки и более простые модели с почти таким же названием. Пришла же самая дешевая модель, хотя в описании продавец накопипастил про самую навороченную.
Хотел написать продавцу — «Борис, ты не прав». Но, похоже, на Али очередные перемены. Пообщаться в продавцом не удалось — не успел нажать кнопку для отправки сообщения, вылезло сообщение от Али — мы уже все решили и вернем тебе больше половины уплаченной суммы. А я распинался, душевное письмо писал… А этот бездушный автомат…
Ну как в анекдоте — «а поцеловать?»
Тем не менее, в этом квадрике нашлась одна интересная фишка, которой можно пользоваться для своих мирных целей и она почему-то никем не описана. По крайней мере гугл не помог.
Но давайте все-таки по порядку. Во-первых, чем это поделие отличается от дешевых наладонных квадриков, которые уже десяток лет выпускаются? Поставили датчик давления, который позволяет очень эффективно держать высоту. Ну и камеру, общающуюся по WiFi добавили.
Все это хозяйство приходит в сумочке — мелочь, а приятно.
Сам коптер в сборе весит около 94 грамм. Из них около 9 грамм камера и около 19 грамм батарейка. Судя по весу, обман с ее емкость не такой и большой — всего в 2-3 раза (декларировано 1800 мАч).
Оставим камеру на сладкое, а пока посмотрим что у самой игрушки внутрях.
Дешевые коллекторные моторчики на раскладных «руках», глазки-светодиодики и плата управления.
На верхней стороне платы, помимо прочей ерунды, установлена микросхема IMU — гироскоп и акселерометр в одном лице, что конкретно за зверь — по маркировке мне опознать не удалось. Рядом — датчик давления, тот самый, который позволяет автоматически поддерживать высоту полета. Скорее всего, произведен NXP, очень напоминает древний MPL115A2, но, определенно, что-то более свежее.
Из интересного на другой стороне платы — микроконтроллер из китайской серии «аналогофнет» без маркировки и трансивер. Я бы сказал, что это XN297LBW, но ключ почему-то на другой стороне. Ох уж эта загадочная китайская душа!
Надо отдать должное, эта XN297LBW имеет значительно большую выходную мощность по сравнению с nRF24L01, функциональным аналогом которой она вроде бы является — 13 dBm (20 мВт) против 0 dBm (1 мВт). Прямо их заменять не получится, преамбулы у них разные и у XN297L есть несколько недокументированных регистров. XN297 по ножкам и подключению совпадает с nRF24L01, а у XN297L столько внешних компонентов уже не требуется, что позволило ее упаковать в 8-ногий корпус — XN297LBW. Только обычный 4-проводной SPI пришлось поменять на 3-проводной.
Ничего больше интересного нет, и системы обнаружения препятствий не обнаружено.
Теоретически она простая, один инфракрасный приемник и несколько инфракрасных светодиодов, переключающихся один за другим. Но дьявол всегда в деталях, хотелось бы посмотреть, как это реально сделано. Но смотреть не на что.
Разъем для подключения камеры трехвыводный. Два — питания и еще один — последовательный интерфейс. А вот это интересно, и копнем чуть глубже, может пригодиться, например, для внешнего управления квадриком или целой стаей таковых.
Теперь займемся камерой.
Плата внутри корпуса болтается никак не закрепленная. На ней какой-то микроконтроллер, скорее всего разработан для систем видеонаблюдения.
Один разъем припаян, к нему подключена камера. Скорее всего, разрешение не лучше VGA. Есть место под второй разъем для камеры — у каких-то дронов установлено две камеры, одна смотрит вперед, вторая вниз.
При включении питания появляется открытая сеть.
nmap -p- 192.168.1.1
Starting Nmap 7.80 ( https://nmap.org ) at 2024-04-24 14:45 EEST
Nmap scan report for _gateway (192.168.1.1)
Host is up (0.0019s latency).
Not shown: 65533 closed ports
PORT STATE SERVICE
5007/tcp open wsm-server-ssl
7070/tcp open realserver
И еще есть скрытый IP, который никогда не отвечает:
Может можно что-то увидеть с помощью обычно браузера, но дальше разбираться было в лом — вроде как и не нужно.
Сеть поддерживает единственное соединение, что сильно усложняет исследование — просматривать все нужно с телефона.
Теперь скачиваем приложение RC FPV для телефона, подключаем телефон к новообразовавшейся сети и запускаем приложение. Видим изображение с камеры и на этом фоне элементы управления.
При этом на выходе TX появляются импульсы. Вот это нам и нужно.
Подключаем логический анализатор и видим, что у нас простейший асинхронный интерфейс 19200 бод. С частотой 50 Герц идут пачки импульсов, стартовый импульс 0х66, завершающий — 0х99, предпоследний — контрольная сумма. Между ними — 5 байт данных.
Четыре я расписал, а последний ведет себя как-то странно — обычно это нуль, но время от времени проскакивают какие-то битики. Зачем — не знаю, но того, что уже нашлось, вполне достаточно. Ниже я разрисовал что и для чего нужно. Не обессудьте, если что перепутал местами.
Можно вместо камеры поставить какой-нибудь ESP и его помощью контролировать полет квадрика.
Думаю, этой информации достаточно, чтобы запускать свою стаю дронов, используя дешевые квадрики, как заготовки.
Самые обсуждаемые обзоры
| +107 |
5765
239
|
| +91 |
7502
75
|
| +19 |
1543
35
|
Ждем сиквел и судя по — продолжению быть! Да и хронометраж наверняка побольше будет и мы не только успеем попкорн открыть, но и насладиться и им, и всем остальным. ;-)
Да и про VGA Вы погорячились — везде 8к написано.
просто судя по тексту было сложно понять сколько маленьких баллонов потребовалось бы. а речь шла об одном.
А водород можно и самому получить, электролизом.
А как получить водород в полевых/домашних условиях, практически за копейки и почти сколько хошь — раньше знали многие вменяемые школьники. Но теперь с химией в школах — полный абзац.
1) Шибко дорого.
2) Через попу (= слишком сложно).
Все потаенные мечты этой публики — в полный рост.
причём тот же Газпром готов хоть сейчас начать двигаться в этом направлении и сможет поставлять водород, который будет зеленее чем у буржуев — буржуйские проекты предполагают закачивание в скважины получающегося в процессе СО2, а газпромовские — получение технической сажи…
скорее электроэнергия от ВИЭ будет использоваться для синтеза того же метана, т.е. природного газа, надо только научиться концентрировать атмосферный СО2 до необходимого уровня, а дальше — уже дело техники, все необходимые реакции освоены.
Алюминий — почти любой, походят почти все сплавы. Обрезки, стружка и т.п. Жир и краска будут мешать.
С порошками р-ция протекает очень бурно.
и какие будут траты — зависит от того, от чего мы будет отрывать атом водорода.
поэтому самый энергетически выгодный — из природного газа…
А в «вашей деревне» какие правила на счет дронов? В «нашей» запускать можно только ночью, под одеялом, и в дали от населенных пунктов. ((
Как Ваше здоровье, кстати?
До 250 грамм без камеры можно запускать по крайней мере без всяких регистраций. Если есть камера — регистрировать независимо от веса, удовольствие на год стоит значительно дороже игрушки. Ну с большим весом — там и лицензии, и экзамены, все собрано здесь: droneinfo.fi/fi — читать замучаешься.
Вот здесь есть про взлом boltgolt.medium.com/hijacking-cheap-wifi-drones-b6b991c7fe2a и здесь hackaday.io/project/19680/logs — но с моим все по другому, и адреса и порты. Немного хитрее сделано — но при наличии желания и времени — все ломается.
Я думал что пульт, это как универсальный USB (Bluetooth) джойстик, только с Wi-Fi интерфейсом.
Получается все намного сложнее.
Выбирал сознательно с BLDC движками, про которую уважаемый автор в начале обзора упоминал У моей плата похожая, но ESC вынесены в лучи. И на крыше установлена мигалка с четырьмя приёмниками — отслеживает расстояние до препятствий. Всё работает, пингуется, открытых портов не нашёл.
Там еще один скрытый порт водится, он не пингуется, он и используется для управления.
К сожалению, не разглядел — этот блок припаян прямо на разъем камеры или сигнальный провод идет к процессору отдельно? — хотя это не особо важно. У вас, кстати, процессор другой — PY32F003 PUYA Flash memory 32Kbyte.
А поясните, пожалуйста, момент с сетью? Я вижу только одну — 192.168.169.*** — она пингуется, из неё же раздаются адреса клиентам. Но не nmap-ится ни в какую, какие есть ещё способы найти адрес: порт потока?
А с сетью там вообще комедия — на какой-то порт надо кинуть ключ, после чего работает передача видео (но тоже не без причуд) и разрешается управление (у меня там вообще левый IP) по UDP, который, как ему и положено, никак не отвечает, только проверяет посылки.
А про провод я спрашивал — надеялся, что сигнал с датчика обхода препятствий подменяет сигнал видео. Но, видимо, он совсем отдельный, и у меня никак работать не будет — и на пульте такой кнопки, судя по инструкции, нет.
Ваш квадрик намного интереснее — там при желании и паршивку на свою поменять можно, поменяв процессор на 64к флеша — и GPS и какой-нибудь optic flow попытать можно с мышиной камерой :)
И насчет сниффинга, всё уже отсниффино здесь blog.horner.tj/hacking-chinese-drones-for-fun-and-no-profit/
если да то ку да? (в пульт, на основную плату и т.п., какого вида или длинны). Спасибо!
Здесь про перепайку антенны на дроне:
www.youtube.com/watch?v=qz0MCakDfsg
Здесь про перепайку на пульте:
www.youtube.com/watch?v=rcUJYnkfmmA
А здесь тест дальности после всех перепаек на 290 метров:
www.youtube.com/watch?v=pTAvqw6JsgA
мой рецепт (диванный теоретик который очень долго это читал и проверял за земле) выглядел бы так: взять плату поддерживающую ardupilot там же управление движками, барометр. прошить прошивку blimp.
видео esp32 но с особой fpv прошивкой умеющую нестабильную связь с обрывами. Либо ip камеру умеющую перешиваться в OpenIPC версии fpv. Либо грошовую аналоговую камеру — для них есть приемники втыкающиеся в смартфон/ноут и там же софт ardupilot
gps модуль неплохо бы
Управление по радио. На самом деле существуют 1000 протоколов, в том числе и дальнобойный дорогой 3dr sik и пульты которые умеют 5-in-1 протоколы, к ним еще палка приемника. Но самое модное сейчас — это lora в виде плат ExpressLRS, их уже встраивают в полетные контроллеры и пульты с этим протоколом стоят подешевле.
в итоге стоить это конечно будет на порядок дороже, супруга не одобрит, но это хотя бы реальнее задача с хорошим таким применением рук.
ps Одни кадры под Питером запускают неуправляемые метеошары. Немного другого класса увлечение но там интересные задачи по телеметрии и особенно передаче видео на дальние расстояния
Я про них писал тут mysku.club/blog/diy/90778.html и тут mysku.club/blog/china-stores/90661.html
Антенна в квадрике, как правило — четвертьволновой штырь, удлините — потеряете резонанс и чувствительность. Поставите антенну с лучшим согласованием — на приемнике выигрыш небольшой будет, на передатчике — большой. Все остальное — это игры с направленностью.
Честно говоря, я не очень понимаю ту антенну, что на вашем рисунке. Лучше обычную wifi, где штырек и трубка-противовес вытащить из корпуса и поставить.
на картинке покажите и где разрезать н плате для отключения того тихого ужаса)
А антенну от лаптопа лучше не использовать — там очень длинный провод до самой антенны, затухание будет. А где попало обрезать — согласование может сильно пострадать. Неужели дома не валяется антенн от железяк на выброс?
Эта может быть комбинированной на 5 и 2.4 гигагерца, от универсальности что-то пострадает.
Как-то так:
хотя у меня 2 игрушки на одном с грузиком wi-fi
я так понимаю как раз про эту и говоришь, что подходящая антена
верхнюю дорожку(которая на минус идет) зачистил чутка и к ней припаял землю
мож совет есть какой !?
спасибо!