Аналоговый датчик CO2

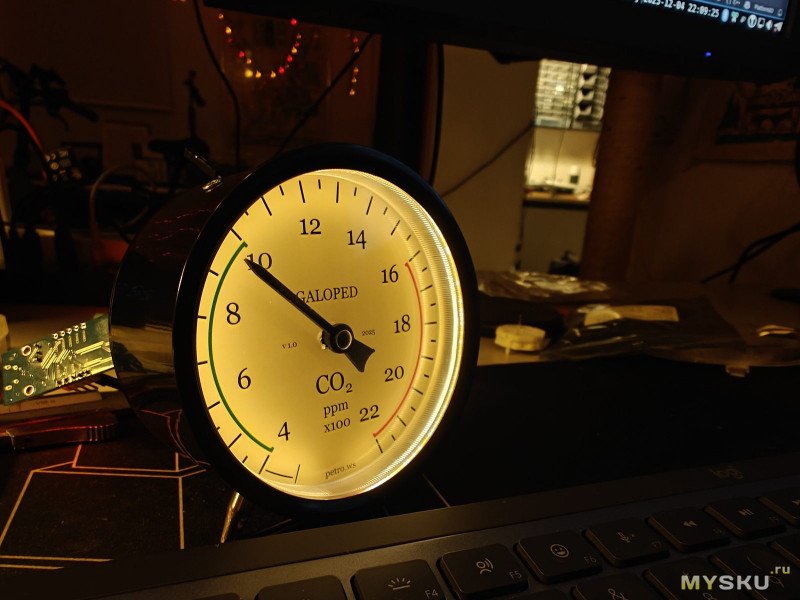
Всем привет и наступающими! Захотелось тут сделать пару гаджетов для друзей в их умные дома. И что-то вдруг подумалось — а что они все скучные такие? Давайте же сегодня сделаем датчик в таком форм-факторе, в котором точно не купишь в магазине, будет отличный подарок на Новый Год или Рождество. Ну и ещё что-бы подарить было не стыдно.
Сразу оговорюсь, прибор конечно же не аналоговый, а полностью цифровой. Ламповый тут только дизайн, внутри же ничего сверхъестественного на данный момент времени. Используется народный датчик SenseAir S8 и инструментальный шаговый двигатель для автомобильных приборок.

Дисклеймер: электроника у меня только хобби, так что могут быть неточности и ошибки. Пишите комментарии, поправим. Так же являюсь Луноходом и живу в Германии, что приводит к некоторым особенностям данного поста: цены в евро + в процессе разработки мы будем использовать только софт под Linux.

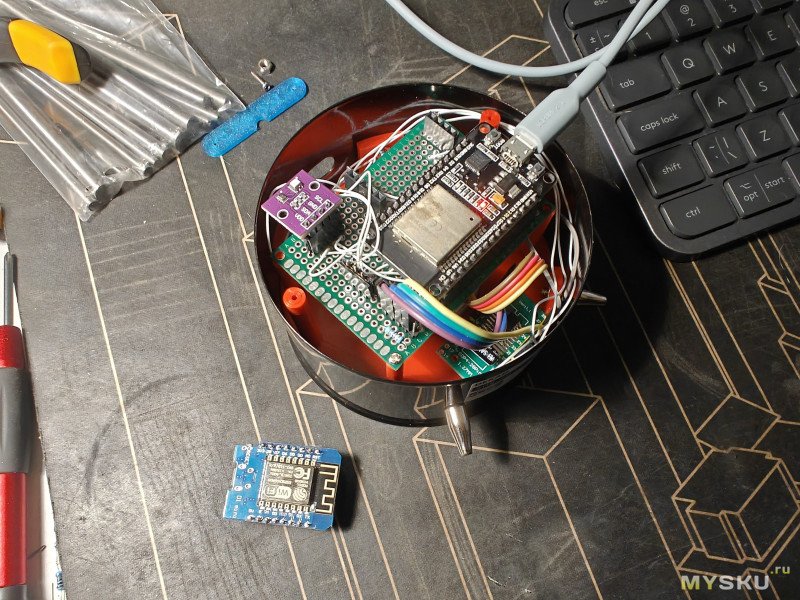
Полное создание данного малыша заняло примерно полтора месяца. Обзор скомпилирован из фоток разного времени, когда я ещё находился в активном поиске — на фотографиях могут быть разные версии приборов, прототипов, могут быть отличия в деталях, косяки и видна пыль. Просьба отнестись с пониманием :)

Всё опубликованное здесь и в репозитории лицензировано под GNU GPLv3.
Итак, для начала сформируем требования:
В общем, всё что у нас задумано — уже можно сказать существует. Всё что нужно сделать — это собрать воедино :-)
Изначально я хотел сделать именно «авиационный прибор», но в процессе у меня быстро попросили сделать так же ретро-версию. Соответственно, прибор у нас будет с опциями комплектации, каждая может быть выбрана независимо:
Мне не нравится, что многие хорошие девайсы зачастую сложно найти. Часто никто не париться с названием и делает что-то типа «Advanced Co2 home sensor module», которое невозможно найти или понять — где что.
Придумал название для серии датчиков — Galoped. Название не несёт никакого смысла, просто стоял курил на улице и подумал — надо что-то такое, что было в стиле Икеи, состоящие из слов «Галоперидол» и «Педиатр». Так и придумал.
Небольшая предыстория — сделать «аналоговый» показометр у меня была уже очень давно. Я где-то в году 2012 купил себе двух-стрелочный тахометр от турбовинтового самолёта, который я хотел «оживить». Естественно никто ничего за 10 лет не оживил :) Но идея никуда не девалась, прибор переехал вместе со мной в Германию в 2017 году и до сих пор стоит у меня на столе:

Данный девайс оживить сложно, ему нужно два трёхфазных сигнала, которые вращают контрольные диски внутри, которые через магнитную муфту отклоняют стрелки. Девайс большой и наверняка шумный. Но в принципе это возможно, он может указывать что-то в процентах. В данном случае лучше было-бы воспользоваться современными технологиями и сделать всё с нуля — у меня вроде как всё есть для этого: старенький 3D принтер Ender-3 (ещё самая первая модель) и руки чешутся.
Конечно на рынке есть всякие-разные показометры, например на Алишке полно приборов типа такого:


, но они все сделаны для стритсракеров и мало подходят для разумного примнения. До того момента как я понял на чём подобные приборы работают — думал заказать на пробу, разобрать и посмотреть. Но это не понадобилось, так как оказалось что сделать с нуля в общем будет проще.
Следующий вопрос — а что, собственно, показывать? Можно отображать разные метрики умного дома, с работы или домашней инфраструктуры, но такое слишком специфично. В итоге выбираем уровень CO2 — подходит отлично: таких исполнений датчиков просто нет (я не нашёл ни одного), данная метрика медленно меняется, автономна (можно измерять на месте), кроме того полезна — можно посмотреть когда пора-бы проветрить. У нас в офисе кстати постоянно спорят — надо ли открывать окна или нет, и такой девайс может разрешить подобные спорты путём прямого инструментального измерения. Я не буду в сотый раз расписывать — что такое измерение CO₂ и если тема для вас непонятна — почитать можно например тут. В качестве измерителя выбираем SenseAir S8, как самый авторитетный из народных. Почитать про него и сравнение с другими можно здесь. Ну и конечно же данный прибор может показывать что угодно, строго говоря CO₂ — только лишь пример, что-бы получить законченное устройство.
Когда пришла в голову идея создания нового прибора — казалось что всё просто, берём шаговый моторчик (серву?) и приводим в движение одним из миллиона способов. Но быстро стало понятно что серва не подходит — шумная, неточная и имеет слишком малый угол поворота. Довольно быстро я нагуглил что существует прям народный шаговый двигатель X27-168, точнее — целое их семейство. Довольно быстро нашёл пост замечательного парня guy.carpenter с экспериментами с драйверами данных двигателей. Данные моторчики широко применяются в различных девайсах, например популярны у симмеров. Так же, оказалось что их существует целое большое семейство — например есть варианты с 2-мя стрелками или датчиками нуля (варианты для часов).
Существуют целый семейство и множественные клоны специальных драйверов, которые реализуют алгоритм микростеппинга: когда одна команда от контроллера поворачивает привод не на одно деление (обычно это 1/3°), а на 1/12°. Так же в даташите написано что такой способ является предпочтительным — это повышает точность и уменьшает шум привода.
Для начала заказал сразу шесть моторчиков (комплект обошелся в 12€) и проверил их через рандомные H-Bridge драйвера. В принципе работает, но выглядит очень так себе — точность плохая, шум сильный. В итоге заказал обойму из 10 драйверов VID6608 и стал их ждать.
Первый прототип собрал на макетных платах и приступил к тестированию. В принципе, что-то уже работало, но тут было первое разочарование: собрав прошивку на коленке в platform.io с библиотекой от уважаемого guy.carpenter наткнулся на кучу багов и проблем. Пришлось их на ходу править, что довольно сильно затормозило процесс. В какой-то момент я пришёл к выводу что проще написать свою с нуля, чем разбираться в оригинальной — автор явно потыкался немного, а потом потерял к теме интерес.
С самого начала задумал использовать прошивку Tasmota как основу для девайса, т.к. содержит в себе уже всё что нужно и широко известна. Но тут меня ждало следующее разочарование, что в Tasmota имеется поддержка только H-Bridge драйверов для «обычных» шаговых двигателей.
Итого, формируем наш с вами план — как же нам собрать всё вместе?
Итак, раз решили — надо делать :-) Клонируем проект и погружаемся в документацию. На деле оказалось всё непросто: документация в принципе есть, но довольно отрывочная, пришлось выбрать парочку простых драйверов и использовать как живой пример. Посмотрел как сделано поддержка других библиотек — они просто закоммичены напрямую прямо в репозиторий, не как суб-модули или зависимости. В этот момент я решил что проще написать свою библиотеку и добавить её туда же + драйвер.
Про разработку особо не буду распинаться, сделано всё по образу и подобию уже существующей SwitecX25 — только без багов)) Отличия от старой:
В итоге появилась новая библиотека: arduino-vid6608.
Библиотека использует более простой алгоритм расчёта ускорения, где имеется статический массив расстояние-задержка, и до первой 1/2 пути происходит сравнение расстояния и рост скорости, на второй половине происходит замедление. Функции задания положения асинхронные, функция vid6608::loop() чувствительна к точности вызова функции обновления.
На видео пример работы алгоритма — прибор просто показывает случайные значения. В итоге оставил так — как по мне получилось достаточно реалистично при минимуме вычислений.
Далее выбираем следующий свободный Driver-ID в Тасмоте и занимаем его. Мне достался номер 92, в результате чего появился на свет драйвер xdrv_92_vid6608. Обратите внимание что реализация именно в виде драйвера общего назначения, изначально я думал сделать как display, но у данного класса драйвера нет достаточно точного тайминга для обеспечения плавного движения стрелки.
Сделав первую версию драйвера — сразу же сталкиваемся с двумя новым проблемами:
Решение первой проблемы очевидно: для ESP32 в Tasmota используется FreeRTOS из пакета разработки ESP-IDF, а значит что мы можем использовать примитивы и функции операционной системы реального времени. Собственно решение простое как полено: мы просто заведём обработку обновления в отдельный поток, который по-умолчанию уйдёт на второе ядро (мы будем ставить на плату двух-ядерную версию ESP32):
Хорошо, но данный трюк сработает только для ESP32, а для старой ESP8266 данное решение не канает. В итоге оставил как есть — я не планировал использовать ESP8266, и в принципе драйвер там всё равно работает — только довольно медленно: порядка 20 секунд на каждые 10 градусов движения. Этого всё ещё достаточно для отображения медленно изменяющихся параметров (такие например как температура или количество лайков к статье на муське).
Решение второй проблемы менее очевидно: надо просто добавить вызов функции yield() в процедуру выставления нужного шага:
В этом случае даже многократный вызов в цикле не будет блочить нашу программу и мы избавимся от падения Watchdog.
Ещё хочу коснуться другой проблемы: тайминги. Для красивой отрисовки движения стрелки мы должны выдерживать тайминги вплоть до 0.3мс (300 мкс), что уже средствами таймеров FreeRTOS невозможно. Да, у них есть своя реализация delayMicroseconds(), но посмотрев в исходный код нас ждёт фрустрация: там просто цикл из nop-ов на нужное время. Что просто превращает в тепло время ожидания вместо таймеров. Проблема на данный момент не решена — если кто-то знает хорошее решение — пожалуйста напишите в комментах. Из хорошего: проблема не то что бы большая, она проявляется только во время активного движения стрелки и только на некоторых участках.
В любом случае: патчи успешно приняты в Тасмоту и баги поправлены:
На момент написания обзора драйвер уже включён в релиз Tasmota v15.2.0 Stephan. Обратите внимание что третий пакет изменений (сброс из сохраненного состояния) в релиз попасть не успел, так что база для прошивки пока что всё равно development.
Драйвер добавляет следующие команды:
Драйвер поддерживает до 4 двигателей. Все команды по-умолчанию управляют первым двигателем, могут быть с суффиксом мотора (от 1 до 4), при этом 0 — это все двигатели. Пример: «GaugeSet0 520» — выставит все двигатели в значение 520, «GaugeZero3» — сброс только мотора №3.
Это была одна из главных загадок для меня: я когда только заказал и сидел ждал моторчики, пытался нагуглить или выяснить — как же делают другие? На форумах симмеров предлагали всякие громоздкие решения типа оптических датчиков, а все остальные — просто ничего не писали про это. В старой библиотеке в исходном коде нашёл объяснение — там просто происходило движение назад на всю шкалу, что, видимо, приводило к торможению привода в крайнем положении, после чего текущее положение принималось за нулевое. Это действительно работает, но приводит к долблению нашего моторчика об концевые упоры — непорядок.
Собственно решение: а давайте просто будем запоминать текущее значение «куда-нибудь» и потом использовать его для калибровки. В этом случае можно просто продвинуть стрелку вперёд на остаток от последнего значения, а потом полный круг назад. Если стрелка была в рассинхроне с тем что у нас было записано, то в худшем случае произойдёт долбление либо в начале, либо в конце (смотря куда уехало реальное значение), но в итоге стрелка будет гарантировано в нулевой позиции.
Вопрос только — куда писать? Флеш не подходит, т.к. у него сильно ограничено кол-во записи. Но всё уже придумано до нас: это — сегнетоэлектрическая оперативная память (Ferroelectric RAM, FeRAM или FRAM) — оперативная память, по своему устройству схожая с DRAM, использующая слой сегнетоэлектрика вместо диэлектрического слоя для обеспечения энергонезависимости. Чип стоит недорого и обеспечивает до 10¹² циклов записи, этого должно быть достаточно для чуть больше 31 тысяч лет непрерывной работы при условии записи раз в секунду. Реализация очень простая — давайте просто поставим недорогой чип Fujitsu MB85RC04V FRAM на плату и будем писать туда каждый раз, когда стрелка принимает команду.
Пример восстановления из сохранённого состояния. Всё работает и не долбится где не следует :-)
Вообще, помимо FRAM существуют другие решения, например DRAM с бекапом во флеш при отключении питания и им подобные, но в данном случае это избыточно. Много запоминать нам и не надо, стоит недорого.
Итак, мы отработали основные идеи и можно приступать к дизайну электроники нашего девайса.
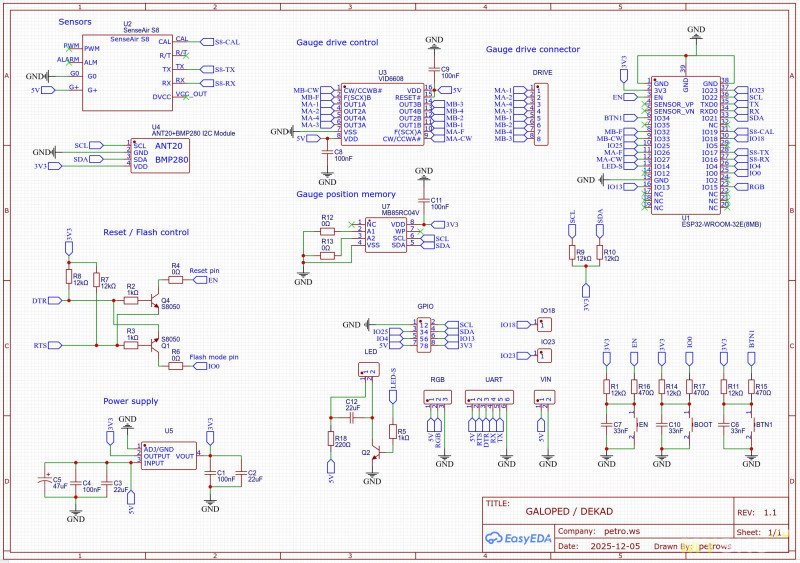
Внимание: я буду использовать схему с исправлениями оригинального дизайна. Вы можете заметить отличия от фотографий реального девайса, но схема уже содержит исправления косяков. Это сделано для простоты повторения. Оригинальные схемы могут быть найдены в репозитории, если вас интересует именно изначальное исполнение.
Заходим на EasyEDA и рисуем схему:
Основа для всего девайса — модуль ESP32-WROOM-32, двух-ядерный, 4Мб флеша. Вы, конечно, можете поставить любой другой в том же форм-факторе.
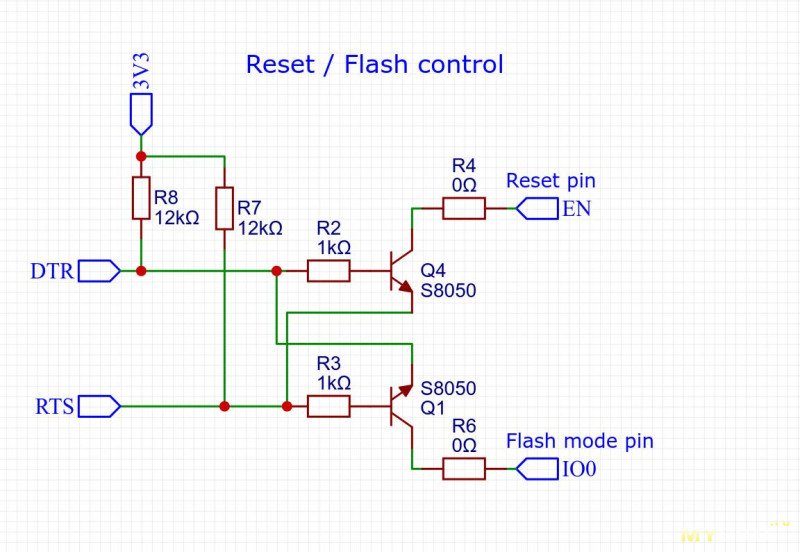
Данная схема нужна для удалённого сброса кристалла из esptool без необходимости нажимать кнопки сброса/boot. Схема срисована с модуля ESP32-Devkit-v1. Реализует элемент ИЛИ-НЕ для обеспечения очередности сигнала сброса с DTR или RST. Это обеспечивает прошивку через подходящий USB-UART модуль в полностью автоматическом режиме.
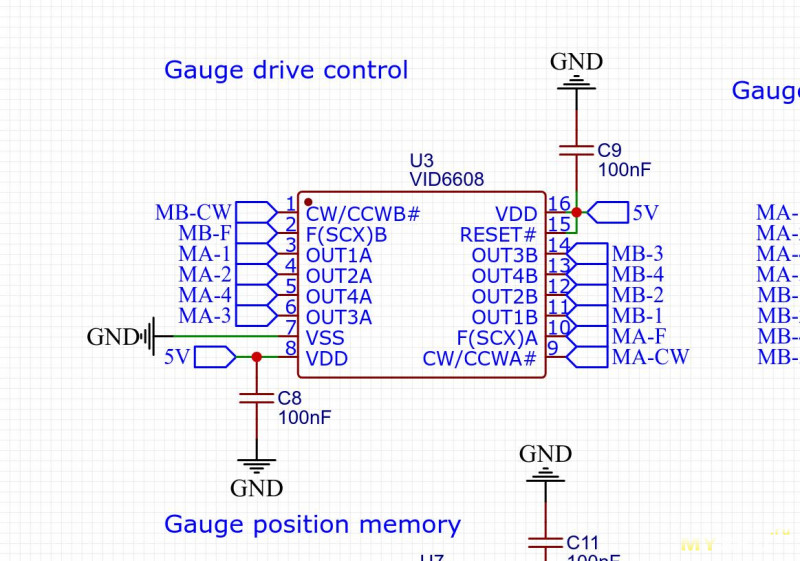
Собственно — самое главное :) Драйвер привода, двух-канальный. В стоке девайс собран с одной стрелкой, но может быть оснащён двойной при необходимости. Чип не управляется схемой сброса с MCU, как это рекомендует даташит, так как у меня чипы с алишки VID6608 реагировали неадекватно — возможно не-оригиналы :) В любом случае, прижать резет к питанию и поставить рекомендуемые конденсаторы — базовый минимум, работает как надо тогда.
На данный разъём выведены GPIO 4, 13 и 25 а так же шина I²C, к которой можно подключить дополнительные датчики или исполнительные устройства, например часы. Присутствует питание и земля.
Выполнена на I²C кристалле FRAM памяти MB85RC04V, производства Fujitsu. Имеет на борту 4Кб памяти — довольно скромно по нашим меркам, зато недорого и работает :)
Дальше ничего особо интересного нет, от модуля разведены:
Заказываем и ждём :) У меня случилось что-то с доставкой и я получил платы только недели через три с извинениями. Платы заказаны с установкой деталей с одной стороны, без модуля ESP32 (они у меня были отдельно, плюс я не был уверен что не наделал косяков).
Народные x27-168 и им подобные рекомендуют закреплять мотор посредством пайки. Хорошая идея, в общем, но требует отдельную печатную плату. Для установки двигателя в корпус сделал простой вариантик с выводами как под разъем, так и под пайку.
Собираем и проверяем — всё почти работает :) У первой версии был один косяк — у кнопки 0 не стал ставить подтяжку, т.к. в документации Tasmota утверждалось что при такой конфигурации используется внутренний резистор подтяжки в MCU. Но нет, нифига. Если оставить болтаться в воздухе то кнопка срабатывает, что может приводить к сбросу настроек (при «нажатии» на 45 секунд). Но благо поправить очень просто — кидаем выводной резистор поверх и готово.
Основная плата для привода в EasyEDA Web: oshwlab.com/petrows/galoped-dekad
Breakout плата для привода в EasyEDA: oshwlab.com/petrows/galoped-dekad-drive
Это, наверное, самое важное. В этом разделе мы определим — будет ли наш прибор выглядеть как колхоз или же как что-то приличное. Разумеется, корпус можно полностью сделать на 3D-Принтере, но я эту идею отбросил сразу, по бокам будет видно что корпус печатный, а хотелось что-то более няшное, а значит — покупное и фабрично сделанное. Кроме того, у нас в требованиях пунктик что девайс должен быть простой в повторении. Следовательно, Aliexpress подходит тут слабо — у продавцов часто фактические изделия отличаются в зависимости от времени и может не соответствовать картинке. Ну и внутренности тоже могут быть разных ревизий, а нам надо что-бы всё влезало хорошо.

Начать решил с Ikea. Доводы такие: икея распространена по всему свету и у них изделия строго одинаковые везде. Следовательно, сделать себе такой прибор можно будет практически везде, купить икеевскую штуку можно даже там, где Икеи нет. Посмотрел что у них есть и выбрал Ikea Dekad. Это единственное что подходило более-менее.

Я хочу сказать что этот лот с самого начала мне не очень понравился, думал что будут сложности. Но как же я ошибался! Девайс просто как будто придуман для самоделок. Красивый и ровный корпус, очень технологичный — минимум лишнего, внутри всё на болтах. Циферблат, рамка и стекло — отдельные детали, что позволяет развернуться полёту мысли. Сверху имеется дырка для привода звонка — который электрический и приводится в действие электромотором. Его можно оставить и например удивлять пользователя громким звонком, если CO₂ высоковат. Но я решил что это будет перебор :)

От оригинального будильника нам понадобится: собственно корпус, стекло, рамка (я так думал тогда, на самом деле — не совсем), гайки и ножки из нержавейки, а так же пипка от стрелки — мы её запрессуем в нашу.
Что мы узнали на данном шаге:
Лицо нашего прибора — тут всё должно быть максимально по красоте. У меня ушло на это больше времени чем планировалось. Начал с того что нашёл видео, где мужик делает круговую шкалу в Inkscape. Сделал по аналогии — у меня только более свежая версия, там были небольшие отличия. У меня ушло много времени что бы разобраться — для того что бы модификатор «Шаблон по кривой» работал — ваш образец кусочка шкалы должен быть одной целой кривой, тогда всё делается правильно. Документ делаем сразу под будку само-обслуживания фото-печати, под 10х15.

Открываем фотку авиационного прибора — нашего талисмана и вдохновляемся :) На самом деле на дизайн ушло несколько дней, плюс я его в процессе несколько раз менял — поменял отображение мертвой зоны, зеленые и красные секторальные линии сделал более похожими на реальный прибор.
И, сразу делаем версию ретро:
Для дизайна шкалы мы должны определить минимальные и максимальные значения. Смотрим на даташит на наш моторчик x27.168 и видим что полный оборот — это 315° (на самом деле 320°, но на момент дизайна шкалы я этого не знал). Теперь прикидываем: у нас есть 315*12 шагов, надо захватить примерно подходящий диапазон и минимизировать вычисления (особенно деление). Так же нужно сделать небольшую «мертвую зону» (для индикации не-готовности прибора). Рассчитываем: оставляем 15° на отображение мертвой зоны, итого у нас остаётся 300° значащего диапазона. Разбиваем его на 18 кусочков, получается что мы можем отобразить от 400 до 2200 ppm, а самое главное, что при этом получаем ровное соответствие:

Идём в DM и печатаем нашу чудо-полиграфию в будке. У нас это удовольствие стоит примерно 30 копеек при печати малыми тиражами. У нас при печате в будке есть только глянцевая фото-бумага, матовую надо заказывать. Я думал что это проблема, планировал сбрызнуть матовым лаком — но это не нужно, всё выглядит супер и так.

Дальше сталкиваемся с проблемой — а как нам сделать красивую дырку в центре, что бы это не выглядело как колхоз? Я пытался просверлить или прорезать, получилось так себе. В итоге решение пришло такое — я заказал на Amazon пробойники для кожи. Просто пробить молотком получается плохо, но если зажать пробойник в патрон шуруповерта и «просверлить», то получается идеально ровное и красивое отверстие.
Вот тут я больше всего провозился в итоге. Изначально план был простой — в Икеевском будильнике штатная рамка как будто прям сделана для подсветки, она полу-прозрачная, изнутри накатка — выглядит супер. Но на деле оказалось всё не так просто.

Сразу стало очевидно что обычная светодиодная лента годится слабо — хотелось что-бы подсветка выглядела «лампово», то есть без видимых диодов. Для этого было решено приобрести гибкие филаментные нити на 3 вольта. Выглядят отлично, светятся тоже. Я взял вариант где выводы на одной стороне трубки — не делайте так, монтировать потом очень неудобно. Следующие версии буду делать на лентах с подключением с разных концов.
Приклеиваем прозрачным скотчем к оригинальной рамке и смотрим. Выглядит плохо — из-за того что рамка прижата к стеклу напрямую — получаем яркое гало вокруг циферблата. На фото это не так страшно выглядит, но в реальности всё сильно хуже.
Для RGB подсветки приобрел 2.7мм ленту с адресуемыми диодами WS2812b. С оригинальной рамкой проблема та же — они дают тоже резкое гало вокруг циферблата, а так же выглядят ещё хуже — от диодов подсветка выглядит очень точечной, на реальные приборы мало похоже.

Я пробывал распечатать своб рамку из белого пластика, что-бы получился рассеиватель, но помогает слабо. На фото пример такого варианта. В итоге гало можно немного уменьшить, если диодную ленту клеить диодами наружу — но они всё равно светят сквозь ленту.
Пример рамки из «прозрачного» пластика, как видите тоже — так себе. В этом разделе довольно кратко, но я напечатал и проверил кучу вариантов, с диодами внутри кольца, снаружи, ближе к стеклу и циферблату — результат плохой.

В итоге решил так: сделал рамку из двух частей — черного тонкого кольца под стекло, что-бы погасить гало, полупрозрачную часть обмотал изнутри белой изолентой для приглушения диодов. Мне не нравится и такой вариант, но выглядит уже в целом сносно.
На фото пример с RGB лентой, изолентой и промежуточной черной рамкой. Подробности можете посмотреть на 3D моделях. Филаментная лента встаёт в ту же рамку без модификаций.

Адресуемые диоды так же поззволяют делать разные эффекты, например секторальную подсветку или менять цвет в зависимости от показаний прибора. Секторальная смотрится в целом плохо — она даёт яркий блик на противоположную сторону прибора.
В итоге оба варианта подсветки ставим в двух-составное кольцо, каких-либо эффектов в стоке предоставлять не будем, вкл-выкл да регулировка яркости. Тут конечно есть ещё много чего подумать, но думаю отложу пока до следующих версий.
Теперь самое время сделать пластиковую часть нашего чудо-прибора. Большая часть видимой компоненты (корпус, циферблат) у нас уже выглядят хорошо, осталось только позаботится о задней стенке, стрелке и закрыть дырку наверху корпуса (от механизма звонка). Открываем FreeCAD и приступаем к черчению наших деталей. Кстати, я думал что довольно неплохо знаком с данной CAD-Программой, но решил перед началом посмотреть обучающие видео, нашёл канал Димы Гога тоже из Германии, и просто офигел — я не знал можно сказать ничего. Большое спасибо ему, я сделал всё что нужно гораздо быстрее. Всем очень рекомендую, кто хочет научится делать красивые детали быстро и эффективно.
Итак, шкалу сделали, но что по ней ездить должно? Я над этим долго думал, гуглил по форумам. Там предлагают много чего — вырезать из старой карточки, пробивать, выпиливать руками из металла. Я решил всё-таки попробовать напечатать аккуратно на 3D принтере с максимальным разрешением. Если печатать вверх ногами на хорошей подложке то поверхность получается ровной, по ней даже не видно особо — что она печатная. Я в процессе поиска оптимальной формы и технологии сделал наверное штук сто этих стрелок, они у меня теперь валяются повсюду.

У меня есть любимый лак из Lidl — краска для глушителей. Она даёт прикольную матовую поверхность, я сразу решил черную часть стрелки сбрызнуть именно им. Печатаем, красим — сначала попку, потом саму стрелку белым лаком, который подрезал у своей Фрау.

Получается примерно так. Я изначально хотел заморачиваться с краской, которая в темноте светится, но потом не стал делать — лучше сделать подсветку всего прибора. Так что просто красим доступными красками / лаком и получается хорошо.

Теперь важный момент — берем оригинальную пипку от икеевского будильника, сверлим 1.8мм дырку в стрелке и запрессовываем в тисках пипку в нашу стрелку. Получается здорово — наша стрелка выглядит уже почти как настоящая в самолёте. Кроме того — она идеально плотно насаживается на вал мотора, ничего мудрить с креплением не надо. Ретро-версия стрелки выглядит почти так же и не окрашивается вообще, печатаю сразу черным пластиком.
В целом, прибор состоит из деталей: рамка (если комплектация с подсветкой, иначе используем оригинальную ikea), передняя панель с седлом для мотора и платы, задняя крышка, крышечьки для датчиков S8 и Климата (если устанавливается).
Вот так выглядит сборочный чертёж. Совмещаем детали, крутим-вертим и смотрим — что-бы все дырки совпадали, ничего не мешало друг другу. Из хитрого оказалось только разве что вычислить — где точно находятся дырки крепления в икеевскоом корпусе: они разнесены на 30° и 34° от вертикальной оси.
Отдельно пришлось повозиться с крышечьками — для датчиков S8 и климата. В итоге остановился на таком — крышка S8 вставляется изнутри и держится просто прижимом (или можно капнуть клея для верности), датчик климата ставится на болты к крышке. Так как оба датчика — опция, то крышки могут не устанавливаться (у меня пока что никто не просил версию без измерения CO₂ на борту, в этом случае надо будет сделать особую крышечьку — или просто удалить дырку под него).

Так же на этом этапе генерим 2D-чертеж, для инструкции для будущих пользователей :) Я для этого создал Page во FreeCad и разместил там нужный View с изометрическим видом продукта, осталось только экспортировать куда следует.
Печатаем все детали, снмиаем и очищаем. Прототипы делал из PLA. Все детали финального устройства печатал пластиком PETG черного цвета, рамка подсветки из «прозрачного». Корпусные детали и рамки — 0.2 мм слой, заполнение 20%, обдув 20%. Крышечьки датчиков и стрелка — 0.1 мм слой. Обязательно включите ironing для получения красивых плоских поверхностей, особенно которые торчат наружу.
Изначально я всё собирал на саморезах М2.3 для пластика, но быстро надоело — выглядит хуже, вопросы к прочности, добавляет «дешевизны» к виду нашего серьёзного спец-изделия. Специально для устройства обзавелся болтами М2 и М3 с головкой под шестигранник из нержавеющей стали. Крепление в пластик будет на вплавляемые втулки — просто изумительная штука оказалась, как я без них жил раньше?

Винтики выглядят куда более солидно, придаёт ещё немножко «авиационного» стиля. Кое-что нужно взять от икеевского будильника (гайки и шайбы М3, пару саморезов М2 для врепления USB-C порта, если у вас нет своих).
Итак, давайте теперь соединим всё вместе! Наконец-то увидим, что за франкенштейн у нас тут получается. Выбираем комплектацию для сборки: Авиационный стиль, подсветка ламповая, оба датчика установлены.
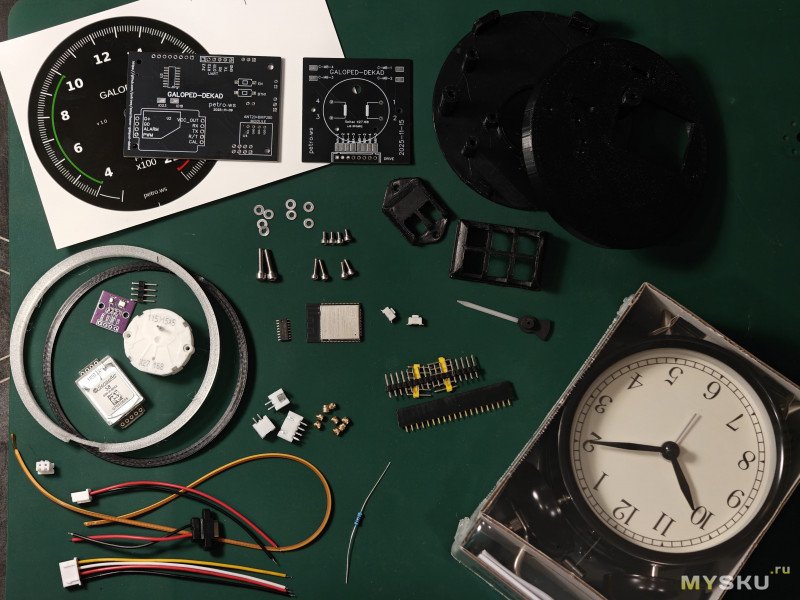
Для сборки у нас уже должны быть все детали, что остались от предыдущих шагов или изысканий. Ну или просто печатаем новые на 3D и 2D принтерах, заказываем платы, разьёмы, провода. Раскладываем это всё на столе и любуюмся. Для сборки нужно вообще следующее:
Первым делом устанавливаем кристалл ESP32. Я заказывал без установки оного, т.к. у меня они были и не хотел рисковать возможным браком. Потом всё проклял — установка лютый геморрой, один модуль запорол. Заказывайте установку на заводе вместе с платой — будет тоже самое по цене и гемора намного меньше.
Сразу после установки важно проверить работоспособность — заливаем прошивку и проверяем что прибор приходит в сознание. Можно залить любую Тасмоту, потом закатаем что нужно по воздуху. Я использую данный адаптер, он имеет нужные выходы RST и DTR (обратите внимание что DTR вынесен на боковую гребенку — я сначала тупил и перепутал его с CTS и испортил одну плату, думая что сотворил непотребное). В этом случае чип прошивается напрямую через esptool или platform.io. Если такого адаптера нет, то подойдёт любой, главное что бы был совместимый с 3.3В, контакты для входа в режим прошивки коротите тогда руками. Питание лучше подавать внешнее — 3.3В в моей версии отладочного разьёма от адаптера хватало для прошивки, но уже не хватало для первого запуска. В вашей версии платы эта проблема решена (выведено 5В), но в любом случае лучше внешнее питание рекомендуется — вдруг что. В этом случае подключаем только землю от адаптера, иначе можно попалить.
Ура! Кажется что мы ничего не запороли. Пока что :)
Запаиваем остальное — разъёмы и собсвтенно нашего героя дня — VID6608. Его ставить куда легче чем ESP32, накосячить сложнее. Обязательно прозванивайте ноги после установки! У меня всё выглядело супер, но половина ног на деле не звонилась. Если плохо припаяли то будет выглядить так: привод будет дергаться хаотично вместо плавного движения. Устанавливаем всё остальное — разъемы кнопки и прочее.
Устанавливаем гильзы под винты M2. Установка очень прстая — ставим на отверстие и вдавливаем пяльником, всё получается ровно и красиво.

Запаиваем наш моторчьик на плату крепления и ставим разьём. Дырки под гребенку можно рассверлить и просунуть провода туда для лучшего удержания.

После установки привода можно вырезать и приклеить лицевую панель. Подготавливаем стрелку, прессуем в неё пипку и красим. После этого можно собрать всё вместе.

На данном этапе нам важно выставить стрелку точно в ноль. Для этого натягиваем стрелку как получится (ставится она очень туго, не стесняемся), потом проворачиваем моторчик до упора (без сигнала он свободно крутится) в нуль и проворачиваем аккуратно стрелку, пока она не будет точно в начале мертвой зоны, это истинный ноль шкалы.

Разбираем будильник, снимаем с него всё ценное, удаляем наклейку и чистим. Получается красивый глянцевый цилиндрик. Стекло аккуратно вынимаем и желательно не ляпаем — жирные следы пальцев потом будет сложно убрать.
Готовим филаментную ленту — припаиваемся к выводам под прямым углом и мастрячим разьём. У меня так же припаяна корректирующая цепь: редистор на 220 Ом и конденсатор подавления пульсаций. В версии платы, что вы увидите в EasyEDA данные детали уже установлены (на момент создания самой первой версии я ещё был в сомнениях по поводу подсветки).
Устанавливаем ленту в рамку, лучше всего развернуть её «мутной» частью внутрь. Для удобства можно подклеить прозрачным скотчем. Так же подкладываем немного скотча между лепестками контактов для изоляции, нормально запихнуть в теормоусадку нет места. Подрезаем ленту так, что бы ровненько сходилось — у нас тогда будет минимальный темный кусочек подсветки.
Вставляем в корпус стекло, черную рамку и нашу рамку с лентой. Важно поставить в праильной ориентации — детали сделаны так что бы входили в тугую посадку (что бы не дребезжало ничего) и провернуть потом может быть трудно. Провода должны выходить ровно снизу посередине, что-бы попасть в вырез основной детали.
Устанавливаем основную корпусную деталь, пропускаем провода подсветки. Теперь можно закрутить основные наши крепёжные магистрали: ножки и болты M3 через верхнюю крышечьку.
Подсоедияем все разьёмы и устанавливаем основную плату, ориенируем её датчиками вниз. Закручиваем всё красивенькими винтами М2.
В задней крышке привинчиваем разьём USB-C на шурупчики, просунув его изнутри. Можно использовать оригинальные серебристые Ikea от будильника, но у меня есть анодированные черные, они выглядят получше. Устанавливаем решётку датчика S8, сам датчик и помещаем крышку на место, прикручиваем всё на два винта М2.
Натыкаем наш климатический датчик на разьём и прикручиваем крышечьку сверху на ещё два болта М2. Сборка завершена :-)

Отдаляем на расстояние вытянутой руки, включаем и проверяем что всё работает. Обратите внимание что без начальной конфигурации прибор даже не будет вызывать калибровку «из коробки», нам необходимо настроить Тасмоту и подготовить агрегат к работе.
Первым делом надо настроить наш «модуль». Какие ноги где сидят и что делалют. Для упрощения жизни я сделал темплейты (версия для RGB и Ламповых подсветок): отличия в одной ноге — она либо на WS2812B либо на транзистор диммера ламповой. Шаблон можно применить руками, но удобнее это сделать сразу в прошивке. Кроме того, нам понадобится парочка #define: по-умолчанию у Тасмоты нет поддержки ни AHT20, ни моего замечательного драйвера. Создаём файл tasmota/user_config_override.h:
Так же, для выбора уже конкретной комплектации выбираем один из двух вариантов в виде файла tasmota/user/user_config_hw.h:
, это было для ламповой, для RGB:
Для ленивых: идём в раздел Releases моего проекта и качаем там готовую.
Остались уже совсем мелочи: надо всё проверить и присоединить стрелку к показаниям CO₂. К счастью, в прошивке ничего даже модифицировать не надо — у Tasmota имеется Berry script в версии для ESP32, так что просто напишем скриптик и закинем в агрегат. Для автозапуска надо именовать данный чудо-файл как autoexec.be:
Данный файл в репе. Функционально состоит из двух частей — чтение / запись в FRAM и функция чтения показания CO₂:
Данный вызов вешает вызов кэллбека co2_update при обновлении. Как видите — проще некуда. Теперь наш прибор ожил и будет что-то показывать.
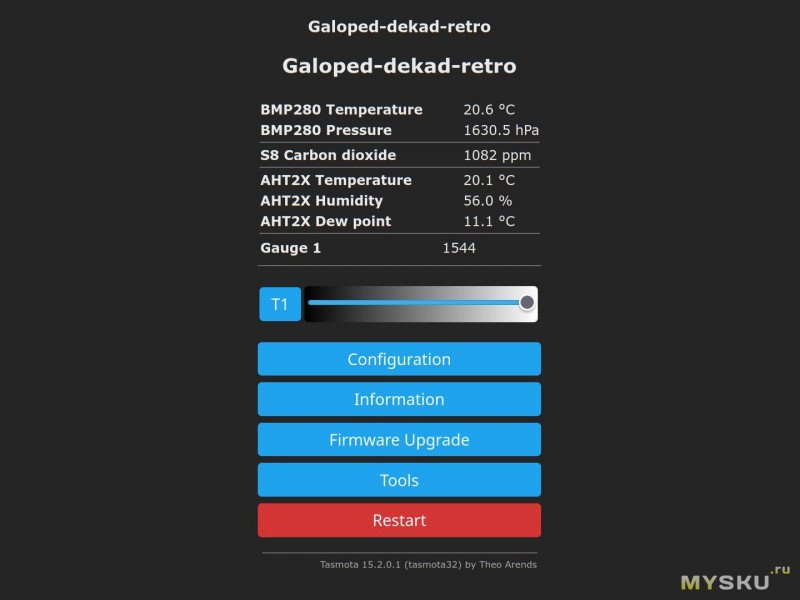
Так же прибор должен показывать показания датчиков и положение стрелки в веб-интерфейсе. В зависимости от комплектации будет либо диммер «ламповой» подсветки, либо выбор цвета для RGB. Дальше уже дело техники — следуйте инструкциям Tasmota что-бы настроить интеграцию в Умный Дом и прочее, наша прошивка отличается только базовой конфигурацией и все фичи доступны.
Точную стоимость сильно зависит от кол-ва изготавливаемых экземпляров и что у вас есть уже в наличии. В моём случае чисто по железу получилось порядка 50€ за прибор, и это при условии что 3Д-принтер у меня свой и корпусные детали получаеются условно-бесплатные. Если кому-то нужен точный расчёт то пишите в каменты — добавлю в обзор.
Вот такое у нас с вами получилось чудо техники — что думаете по поводу?

И руки размяли и подарить не стыдно. Ну и ещё в Тасмоту хороший драйвер добавили. Вообще, устройство конечно легко кастомизируется и адаптируется под суровую реальность:
Что думаю надо бы в будущем улучшить (возможно когда вычитаете этот обзор то уже что-то сделано, см обновления в репе):
Исходники проекта: github.com/petrows/smarthome-galoped-dekad. В репе сейчас небольшой бардак из тестовых деталей и нет нормального Readme — не было времени прибраться, наведу порядок чуть позже. Но всё тем не менее есть.
Если у вас ещё есть хорошие идеи — делитесь, прикрутим. На этом всем желаю хорошего дня.
Сразу оговорюсь, прибор конечно же не аналоговый, а полностью цифровой. Ламповый тут только дизайн, внутри же ничего сверхъестественного на данный момент времени. Используется народный датчик SenseAir S8 и инструментальный шаговый двигатель для автомобильных приборок.
Дисклеймер: электроника у меня только хобби, так что могут быть неточности и ошибки. Пишите комментарии, поправим. Так же являюсь Луноходом и живу в Германии, что приводит к некоторым особенностям данного поста: цены в евро + в процессе разработки мы будем использовать только софт под Linux.
Полное создание данного малыша заняло примерно полтора месяца. Обзор скомпилирован из фоток разного времени, когда я ещё находился в активном поиске — на фотографиях могут быть разные версии приборов, прототипов, могут быть отличия в деталях, косяки и видна пыль. Просьба отнестись с пониманием :)
Всё опубликованное здесь и в репозитории лицензировано под GNU GPLv3.
Характеристики прибора
Итак, для начала сформируем требования:
- Измерение уровня CO2 с хорошей точностью и отзывчивостью;
- Измерение стандартных климатических параметров: температура, влажность и давление;
- Передача всего этого намеренного добра в умный дом;
- Отображение текущего уровня на аналоговом дисплее прибора стрелкой;
- Прибор должен иметь подсветку;
- Веб-интерфейс с отображением статуса, настройками, обновлением прошивки и проч — это важно что бы девайс можно было подарить кому-то и этот кто-то мог с ним разобраться сам;
- Желательно что бы это не выглядело как страшное DIY;
- Устройство должно быть легкое в повторении и не содержать уникальных компонентов;
В общем, всё что у нас задумано — уже можно сказать существует. Всё что нужно сделать — это собрать воедино :-)
Изначально я хотел сделать именно «авиационный прибор», но в процессе у меня быстро попросили сделать так же ретро-версию. Соответственно, прибор у нас будет с опциями комплектации, каждая может быть выбрана независимо:
- Стиль шкалы: «авиационный» и «ретро», так же ставится соответствующая стрелка;
- Подсветка: без подсветки, «ламповая» и «RGB» — я не люблю RGB, особенно что его пихают везде где не следовало бы, но в данном случае можно дать юзеру свободу выбора — это важнее;
- Датчики: CO₂, климата — могут быть установлены в любой комбинации, так же вообще без датчиков — в этом случае прибор будет управляться только внешней командой (например через шину MQTT, или любой логикой на базе Tasmota правил или Berry — в общем на что фантазии хватит);
Нейминг и маркетинг
Мне не нравится, что многие хорошие девайсы зачастую сложно найти. Часто никто не париться с названием и делает что-то типа «Advanced Co2 home sensor module», которое невозможно найти или понять — где что.
Придумал название для серии датчиков — Galoped. Название не несёт никакого смысла, просто стоял курил на улице и подумал — надо что-то такое, что было в стиле Икеи, состоящие из слов «Галоперидол» и «Педиатр». Так и придумал.
Разработка концепции
Небольшая предыстория — сделать «аналоговый» показометр у меня была уже очень давно. Я где-то в году 2012 купил себе двух-стрелочный тахометр от турбовинтового самолёта, который я хотел «оживить». Естественно никто ничего за 10 лет не оживил :) Но идея никуда не девалась, прибор переехал вместе со мной в Германию в 2017 году и до сих пор стоит у меня на столе:
Данный девайс оживить сложно, ему нужно два трёхфазных сигнала, которые вращают контрольные диски внутри, которые через магнитную муфту отклоняют стрелки. Девайс большой и наверняка шумный. Но в принципе это возможно, он может указывать что-то в процентах. В данном случае лучше было-бы воспользоваться современными технологиями и сделать всё с нуля — у меня вроде как всё есть для этого: старенький 3D принтер Ender-3 (ещё самая первая модель) и руки чешутся.
Конечно на рынке есть всякие-разные показометры, например на Алишке полно приборов типа такого:
Приборы с алишки
, но они все сделаны для стритсракеров и мало подходят для разумного примнения. До того момента как я понял на чём подобные приборы работают — думал заказать на пробу, разобрать и посмотреть. Но это не понадобилось, так как оказалось что сделать с нуля в общем будет проще.
Следующий вопрос — а что, собственно, показывать? Можно отображать разные метрики умного дома, с работы или домашней инфраструктуры, но такое слишком специфично. В итоге выбираем уровень CO2 — подходит отлично: таких исполнений датчиков просто нет (я не нашёл ни одного), данная метрика медленно меняется, автономна (можно измерять на месте), кроме того полезна — можно посмотреть когда пора-бы проветрить. У нас в офисе кстати постоянно спорят — надо ли открывать окна или нет, и такой девайс может разрешить подобные спорты путём прямого инструментального измерения. Я не буду в сотый раз расписывать — что такое измерение CO₂ и если тема для вас непонятна — почитать можно например тут. В качестве измерителя выбираем SenseAir S8, как самый авторитетный из народных. Почитать про него и сравнение с другими можно здесь. Ну и конечно же данный прибор может показывать что угодно, строго говоря CO₂ — только лишь пример, что-бы получить законченное устройство.
Когда пришла в голову идея создания нового прибора — казалось что всё просто, берём шаговый моторчик (серву?) и приводим в движение одним из миллиона способов. Но быстро стало понятно что серва не подходит — шумная, неточная и имеет слишком малый угол поворота. Довольно быстро я нагуглил что существует прям народный шаговый двигатель X27-168, точнее — целое их семейство. Довольно быстро нашёл пост замечательного парня guy.carpenter с экспериментами с драйверами данных двигателей. Данные моторчики широко применяются в различных девайсах, например популярны у симмеров. Так же, оказалось что их существует целое большое семейство — например есть варианты с 2-мя стрелками или датчиками нуля (варианты для часов).
Существуют целый семейство и множественные клоны специальных драйверов, которые реализуют алгоритм микростеппинга: когда одна команда от контроллера поворачивает привод не на одно деление (обычно это 1/3°), а на 1/12°. Так же в даташите написано что такой способ является предпочтительным — это повышает точность и уменьшает шум привода.
Для начала заказал сразу шесть моторчиков (комплект обошелся в 12€) и проверил их через рандомные H-Bridge драйвера. В принципе работает, но выглядит очень так себе — точность плохая, шум сильный. В итоге заказал обойму из 10 драйверов VID6608 и стал их ждать.
Первый прототип собрал на макетных платах и приступил к тестированию. В принципе, что-то уже работало, но тут было первое разочарование: собрав прошивку на коленке в platform.io с библиотекой от уважаемого guy.carpenter наткнулся на кучу багов и проблем. Пришлось их на ходу править, что довольно сильно затормозило процесс. В какой-то момент я пришёл к выводу что проще написать свою с нуля, чем разбираться в оригинальной — автор явно потыкался немного, а потом потерял к теме интерес.
С самого начала задумал использовать прошивку Tasmota как основу для девайса, т.к. содержит в себе уже всё что нужно и широко известна. Но тут меня ждало следующее разочарование, что в Tasmota имеется поддержка только H-Bridge драйверов для «обычных» шаговых двигателей.
Итого, формируем наш с вами план — как же нам собрать всё вместе?
- Добавляем поддержку инструментальных шаговых двигателей в Tasmota
- Находим подходящий корпус-донор (часы-будильник)
- Проектируем и заказываем печатную плату
- Проектируем и печатаем корпусные детали
- Придумываем подсветку как-нибудь
- Собираем это вместе и придумываем че-нибудь, что-бы это всё вместе заработало :-)
Добавляем поддержку инструментальных двигателей в Tasmota
Итак, раз решили — надо делать :-) Клонируем проект и погружаемся в документацию. На деле оказалось всё непросто: документация в принципе есть, но довольно отрывочная, пришлось выбрать парочку простых драйверов и использовать как живой пример. Посмотрел как сделано поддержка других библиотек — они просто закоммичены напрямую прямо в репозиторий, не как суб-модули или зависимости. В этот момент я решил что проще написать свою библиотеку и добавить её туда же + драйвер.
Про разработку особо не буду распинаться, сделано всё по образу и подобию уже существующей SwitecX25 — только без багов)) Отличия от старой:
- Поддержка управления только через драйвер VID6608 и им подобным — прямое управление бессмысленно, кмк
- Поддержка настроек кривых ускорения
- Поддержка выставления нуля из сохранённого положения
- Меньше вычислений на шаг, проще алгоритм управления
- Более точное соответствие даташиту, старая не заботилась о некоторых таймингах, которые требует даташит
В итоге появилась новая библиотека: arduino-vid6608.
Библиотека использует более простой алгоритм расчёта ускорения, где имеется статический массив расстояние-задержка, и до первой 1/2 пути происходит сравнение расстояния и рост скорости, на второй половине происходит замедление. Функции задания положения асинхронные, функция vid6608::loop() чувствительна к точности вызова функции обновления.
На видео пример работы алгоритма — прибор просто показывает случайные значения. В итоге оставил так — как по мне получилось достаточно реалистично при минимуме вычислений.
Далее выбираем следующий свободный Driver-ID в Тасмоте и занимаем его. Мне достался номер 92, в результате чего появился на свет драйвер xdrv_92_vid6608. Обратите внимание что реализация именно в виде драйвера общего назначения, изначально я думал сделать как display, но у данного класса драйвера нет достаточно точного тайминга для обеспечения плавного движения стрелки.
Сделав первую версию драйвера — сразу же сталкиваемся с двумя новым проблемами:
- Движение стрелки очень медленное — из-за того что функция цикла не вызывается в Tasmota с достаточным разрешением
- Функция выставления в ноль при запуске вызывает срабатывание Watchdog в некоторых случаях — из-за блокировки главного потока на слишком большое время
Решение первой проблемы очевидно: для ESP32 в Tasmota используется FreeRTOS из пакета разработки ESP-IDF, а значит что мы можем использовать примитивы и функции операционной системы реального времени. Собственно решение простое как полено: мы просто заведём обработку обновления в отдельный поток, который по-умолчанию уйдёт на второе ядро (мы будем ставить на плату двух-ядерную версию ESP32):
// Start background RTOS thread -> required for precision timing
xTaskCreate(
VID6608XvTask, /* Function to implement the task */
"VID6608XvTask", /* Name of the task */
1024, /* Stack size in words */
NULL, /* Task input parameter */
0, /* Priority of the task, lowest */
NULL /* Task handle. */
);
...
void VID6608XvTask(void *) {
while(true) {
...
driver->loop();
...
/*
If we dont need to move any -> go sleep.
This will delay next move begin up to 500ms, but freeds up CPU a lot.
*/
if (!needToMove) {
vTaskDelay(500 / portTICK_PERIOD_MS);
}
}
}
Хорошо, но данный трюк сработает только для ESP32, а для старой ESP8266 данное решение не канает. В итоге оставил как есть — я не планировал использовать ESP8266, и в принципе драйвер там всё равно работает — только довольно медленно: порядка 20 секунд на каждые 10 градусов движения. Этого всё ещё достаточно для отображения медленно изменяющихся параметров (такие например как температура или количество лайков к статье на муське).
Решение второй проблемы менее очевидно: надо просто добавить вызов функции yield() в процедуру выставления нужного шага:
void vid6608::step(vid6608::MoveDirection direction, uint16_t delayUs) {
...
// We should keep resources reserved by others
yield();
}
В этом случае даже многократный вызов в цикле не будет блочить нашу программу и мы избавимся от падения Watchdog.
Ещё хочу коснуться другой проблемы: тайминги. Для красивой отрисовки движения стрелки мы должны выдерживать тайминги вплоть до 0.3мс (300 мкс), что уже средствами таймеров FreeRTOS невозможно. Да, у них есть своя реализация delayMicroseconds(), но посмотрев в исходный код нас ждёт фрустрация: там просто цикл из nop-ов на нужное время. Что просто превращает в тепло время ожидания вместо таймеров. Проблема на данный момент не решена — если кто-то знает хорошее решение — пожалуйста напишите в комментах. Из хорошего: проблема не то что бы большая, она проявляется только во время активного движения стрелки и только на некоторых участках.
В любом случае: патчи успешно приняты в Тасмоту и баги поправлены:
- Добавление драйвера
- Исправление багов многопоточности (я забил на создание синхронизационных объектов, пока не собрал реальный девайс)
- Добавление поддержки сброса из сохраненного состояния и исправление багов по-меньше
На момент написания обзора драйвер уже включён в релиз Tasmota v15.2.0 Stephan. Обратите внимание что третий пакет изменений (сброс из сохраненного состояния) в релиз попасть не успел, так что база для прошивки пока что всё равно development.
Драйвер добавляет следующие команды:
- GaugeZero N — процедура калибровки, опциональная начальная позиция (см следующий раздел)
- GaugeSet N — выставить положение в абсолютном значении шагов мотора, от 0 до 3840 (320*12)
- GaugePercent N — выставить положение в процентах, от 0 до 100
Драйвер поддерживает до 4 двигателей. Все команды по-умолчанию управляют первым двигателем, могут быть с суффиксом мотора (от 1 до 4), при этом 0 — это все двигатели. Пример: «GaugeSet0 520» — выставит все двигатели в значение 520, «GaugeZero3» — сброс только мотора №3.
Калибровка привода
Это была одна из главных загадок для меня: я когда только заказал и сидел ждал моторчики, пытался нагуглить или выяснить — как же делают другие? На форумах симмеров предлагали всякие громоздкие решения типа оптических датчиков, а все остальные — просто ничего не писали про это. В старой библиотеке в исходном коде нашёл объяснение — там просто происходило движение назад на всю шкалу, что, видимо, приводило к торможению привода в крайнем положении, после чего текущее положение принималось за нулевое. Это действительно работает, но приводит к долблению нашего моторчика об концевые упоры — непорядок.
Собственно решение: а давайте просто будем запоминать текущее значение «куда-нибудь» и потом использовать его для калибровки. В этом случае можно просто продвинуть стрелку вперёд на остаток от последнего значения, а потом полный круг назад. Если стрелка была в рассинхроне с тем что у нас было записано, то в худшем случае произойдёт долбление либо в начале, либо в конце (смотря куда уехало реальное значение), но в итоге стрелка будет гарантировано в нулевой позиции.
Вопрос только — куда писать? Флеш не подходит, т.к. у него сильно ограничено кол-во записи. Но всё уже придумано до нас: это — сегнетоэлектрическая оперативная память (Ferroelectric RAM, FeRAM или FRAM) — оперативная память, по своему устройству схожая с DRAM, использующая слой сегнетоэлектрика вместо диэлектрического слоя для обеспечения энергонезависимости. Чип стоит недорого и обеспечивает до 10¹² циклов записи, этого должно быть достаточно для чуть больше 31 тысяч лет непрерывной работы при условии записи раз в секунду. Реализация очень простая — давайте просто поставим недорогой чип Fujitsu MB85RC04V FRAM на плату и будем писать туда каждый раз, когда стрелка принимает команду.
Пример восстановления из сохранённого состояния. Всё работает и не долбится где не следует :-)
Вообще, помимо FRAM существуют другие решения, например DRAM с бекапом во флеш при отключении питания и им подобные, но в данном случае это избыточно. Много запоминать нам и не надо, стоит недорого.
Аппаратная реализация
Итак, мы отработали основные идеи и можно приступать к дизайну электроники нашего девайса.
Внимание: я буду использовать схему с исправлениями оригинального дизайна. Вы можете заметить отличия от фотографий реального девайса, но схема уже содержит исправления косяков. Это сделано для простоты повторения. Оригинальные схемы могут быть найдены в репозитории, если вас интересует именно изначальное исполнение.
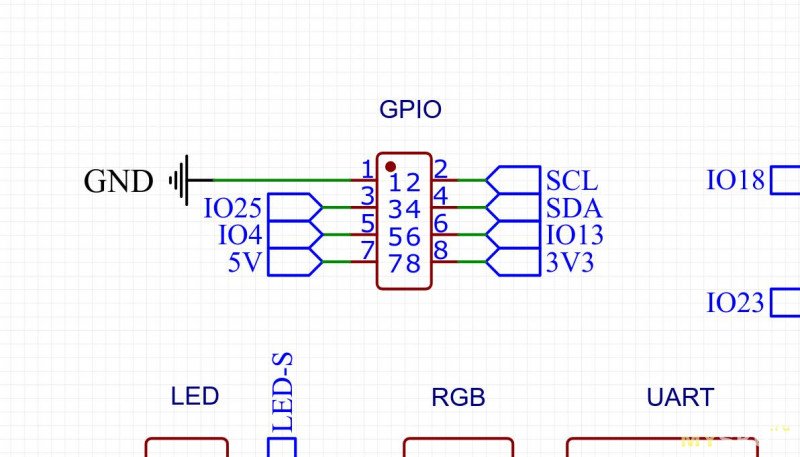
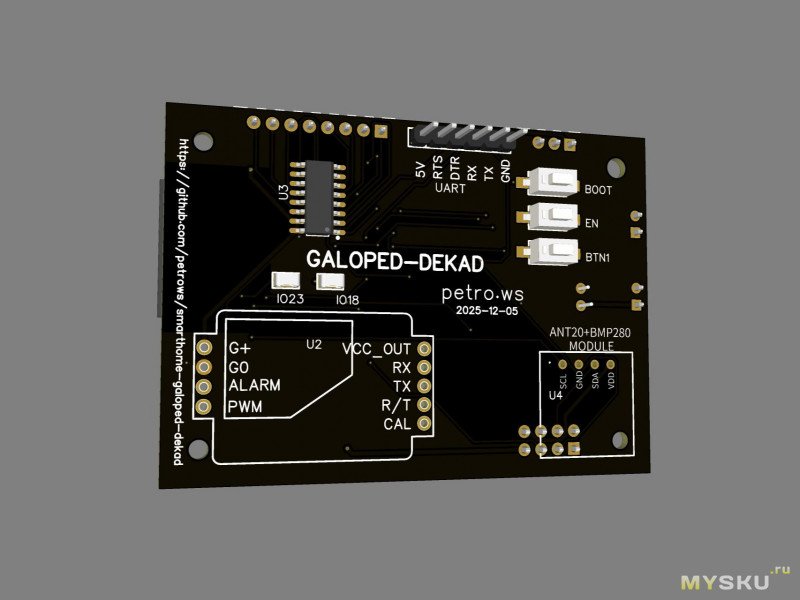
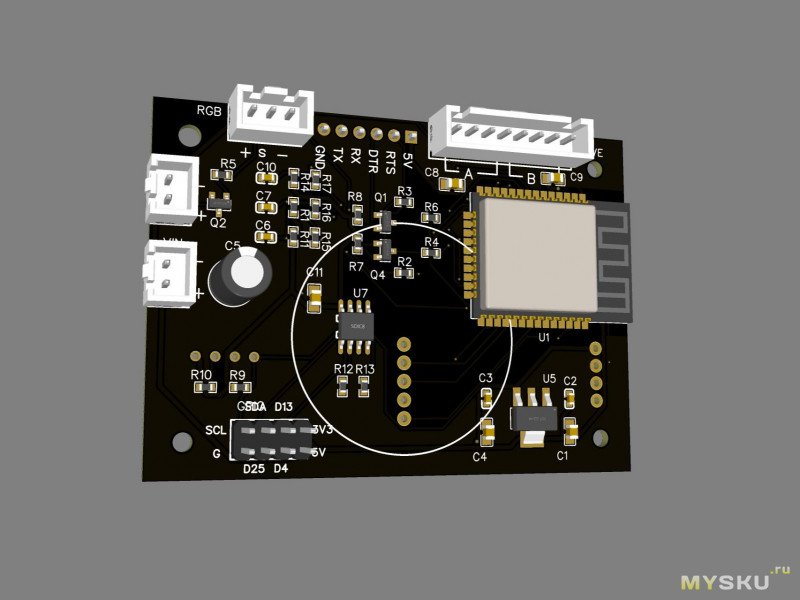
Заходим на EasyEDA и рисуем схему:
Основа для всего девайса — модуль ESP32-WROOM-32, двух-ядерный, 4Мб флеша. Вы, конечно, можете поставить любой другой в том же форм-факторе.
Схема сброса
Данная схема нужна для удалённого сброса кристалла из esptool без необходимости нажимать кнопки сброса/boot. Схема срисована с модуля ESP32-Devkit-v1. Реализует элемент ИЛИ-НЕ для обеспечения очередности сигнала сброса с DTR или RST. Это обеспечивает прошивку через подходящий USB-UART модуль в полностью автоматическом режиме.
Драйвер привода
Собственно — самое главное :) Драйвер привода, двух-канальный. В стоке девайс собран с одной стрелкой, но может быть оснащён двойной при необходимости. Чип не управляется схемой сброса с MCU, как это рекомендует даташит, так как у меня чипы с алишки VID6608 реагировали неадекватно — возможно не-оригиналы :) В любом случае, прижать резет к питанию и поставить рекомендуемые конденсаторы — базовый минимум, работает как надо тогда.
Разъём расширения
На данный разъём выведены GPIO 4, 13 и 25 а так же шина I²C, к которой можно подключить дополнительные датчики или исполнительные устройства, например часы. Присутствует питание и земля.
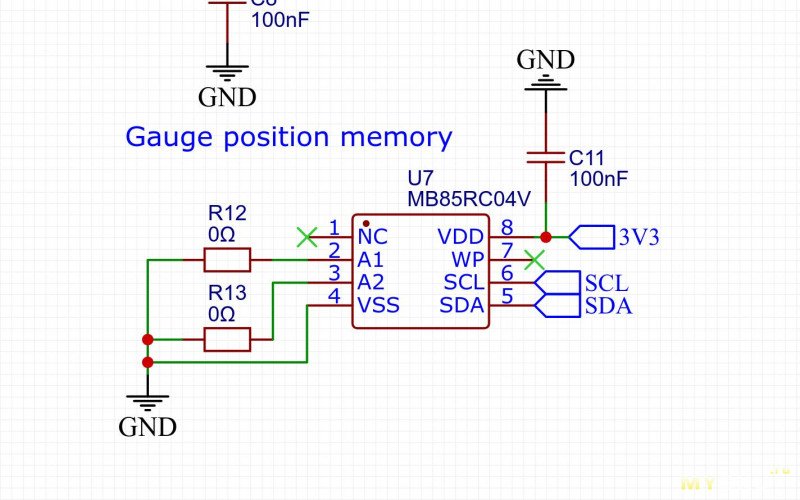
Схема памяти положения привода
Выполнена на I²C кристалле FRAM памяти MB85RC04V, производства Fujitsu. Имеет на борту 4Кб памяти — довольно скромно по нашим меркам, зато недорого и работает :)
Всё остальное
Дальше ничего особо интересного нет, от модуля разведены:
- Кнопка сброса для ручного привода EN. Сбрасывает кристалл при необходимости. Для отсутствия сброса без необходимости предусмотрены цепи подтяжки и конденсатор против дребезга.
- Кнопка GPIO34: настроена как «Кнопка 0» в Tasmota. При однократном нажатии включает/выключает подсветку, при зажатии на 45 секунд сбрасывает настройки и активирует первоначальную настройку через точку доступа.
- Кнопка boot: зажимает GPIO0, переводит в режим прошивки, если нажата одновременно с EN. Данной кнопки нет на фотографиях, добавлена позже.
- Датчик SemseAir S8, подключён к GPIO 16 и 17 для коммуникации, порт калибровки подключён к GPIO 19
- Модуль ANT20+BMP280, подключён к I²C, измеряет температуру, влажность и давление. Является опцией, при отсутствии данных просто не будет.
- Управление подсветкой «ретро» выполнена на схеме биполярного транзистора с открытым затвором — может управлять чем-то ещё разумеется
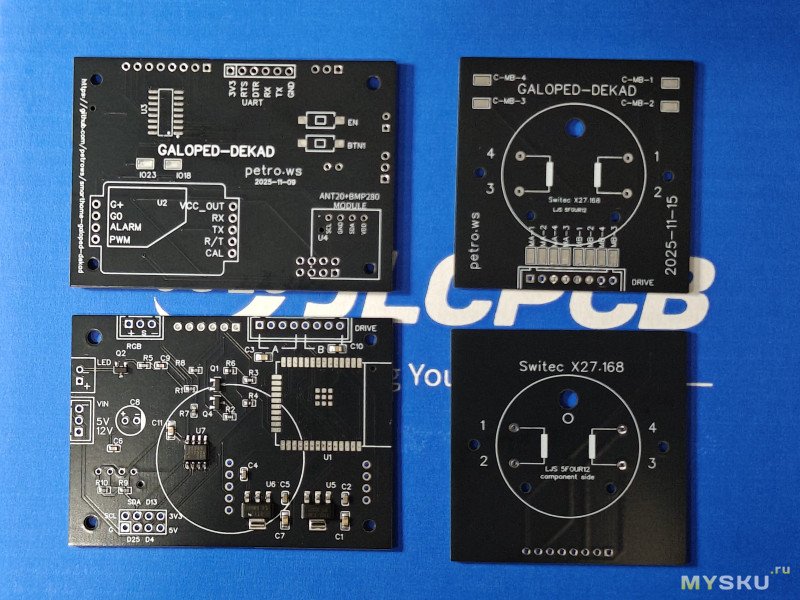
Печатные платы
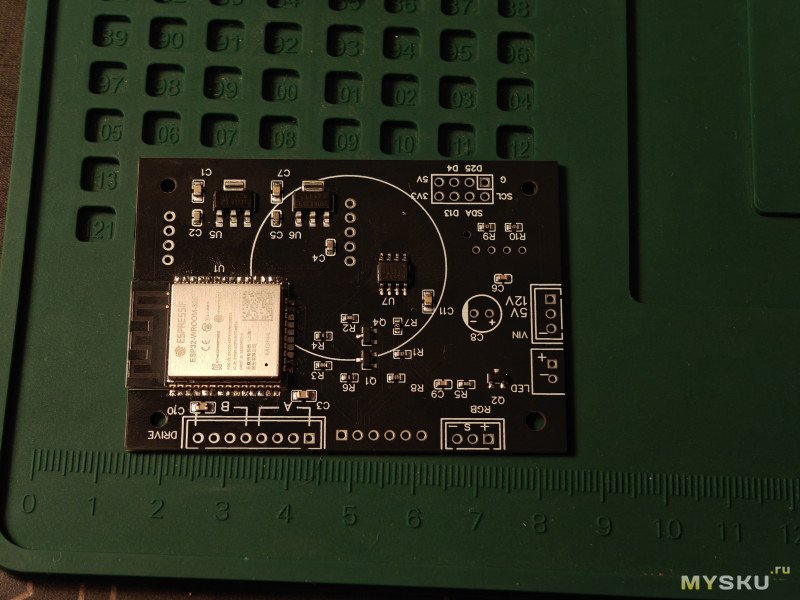
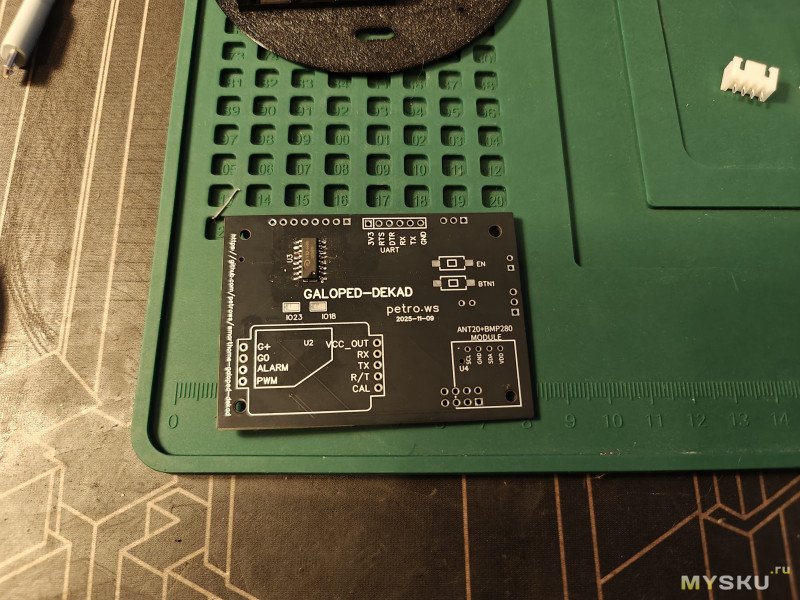
Заказываем и ждём :) У меня случилось что-то с доставкой и я получил платы только недели через три с извинениями. Платы заказаны с установкой деталей с одной стороны, без модуля ESP32 (они у меня были отдельно, плюс я не был уверен что не наделал косяков).
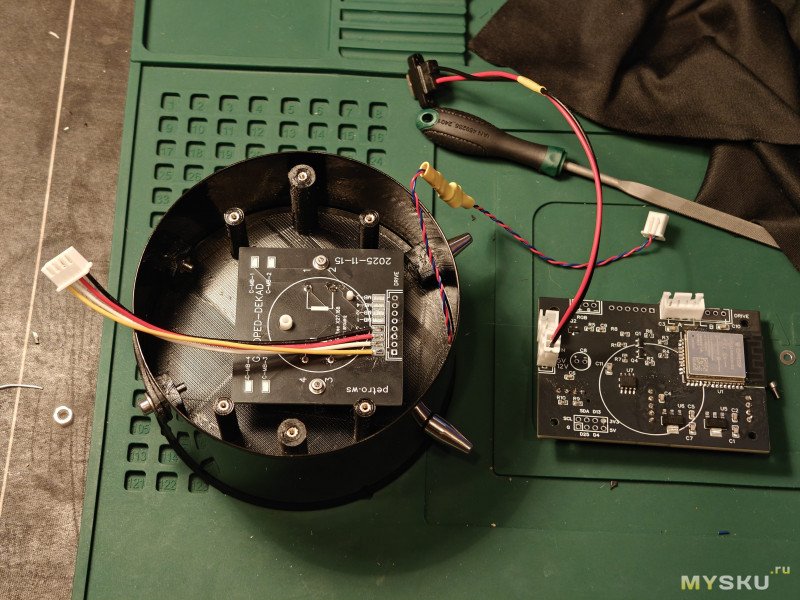
Народные x27-168 и им подобные рекомендуют закреплять мотор посредством пайки. Хорошая идея, в общем, но требует отдельную печатную плату. Для установки двигателя в корпус сделал простой вариантик с выводами как под разъем, так и под пайку.
Собираем и проверяем — всё почти работает :) У первой версии был один косяк — у кнопки 0 не стал ставить подтяжку, т.к. в документации Tasmota утверждалось что при такой конфигурации используется внутренний резистор подтяжки в MCU. Но нет, нифига. Если оставить болтаться в воздухе то кнопка срабатывает, что может приводить к сбросу настроек (при «нажатии» на 45 секунд). Но благо поправить очень просто — кидаем выводной резистор поверх и готово.
Основная плата для привода в EasyEDA Web: oshwlab.com/petrows/galoped-dekad
Breakout плата для привода в EasyEDA: oshwlab.com/petrows/galoped-dekad-drive
Корпус прибора
Это, наверное, самое важное. В этом разделе мы определим — будет ли наш прибор выглядеть как колхоз или же как что-то приличное. Разумеется, корпус можно полностью сделать на 3D-Принтере, но я эту идею отбросил сразу, по бокам будет видно что корпус печатный, а хотелось что-то более няшное, а значит — покупное и фабрично сделанное. Кроме того, у нас в требованиях пунктик что девайс должен быть простой в повторении. Следовательно, Aliexpress подходит тут слабо — у продавцов часто фактические изделия отличаются в зависимости от времени и может не соответствовать картинке. Ну и внутренности тоже могут быть разных ревизий, а нам надо что-бы всё влезало хорошо.
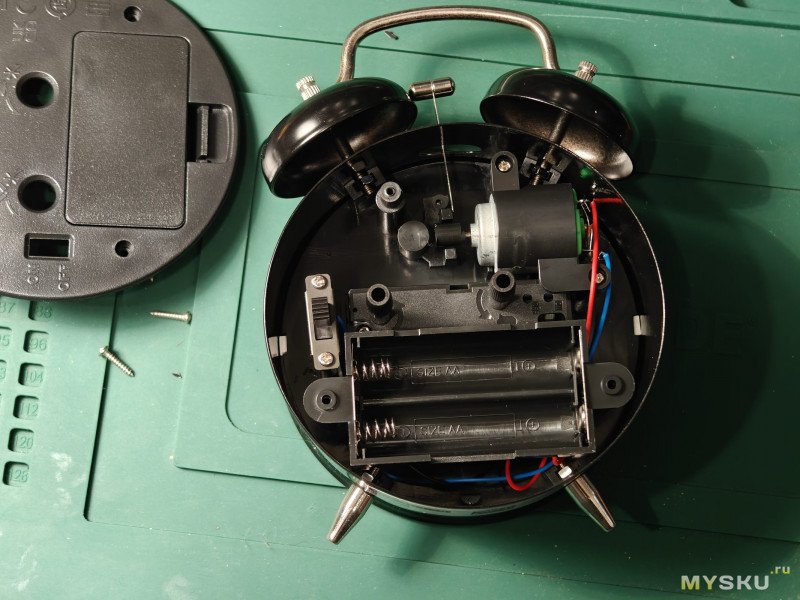
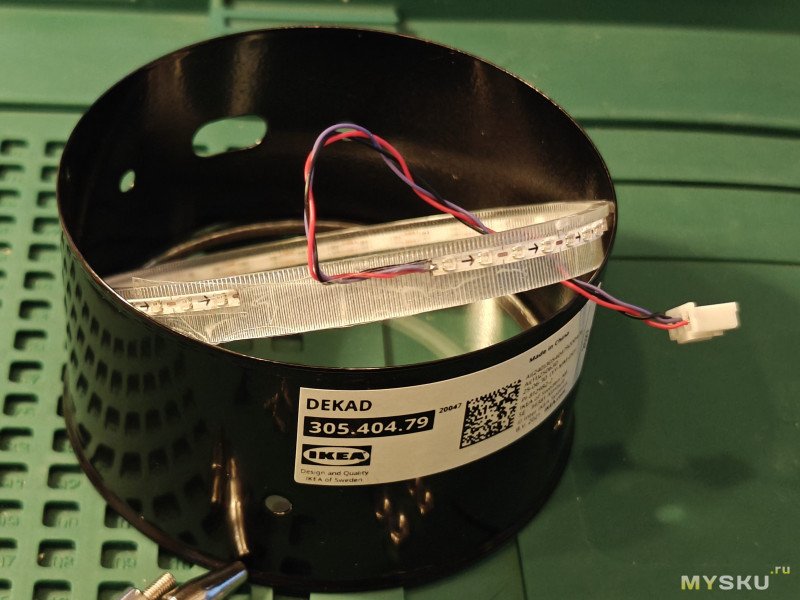
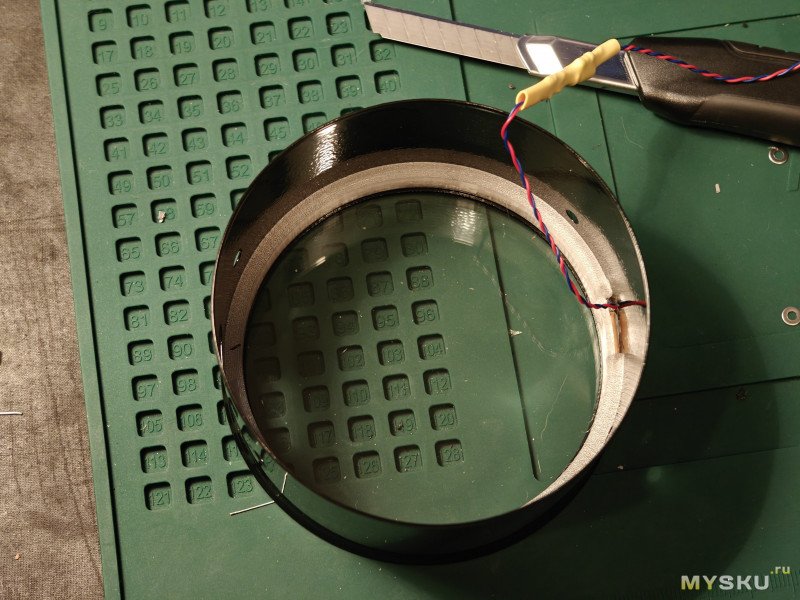
Начать решил с Ikea. Доводы такие: икея распространена по всему свету и у них изделия строго одинаковые везде. Следовательно, сделать себе такой прибор можно будет практически везде, купить икеевскую штуку можно даже там, где Икеи нет. Посмотрел что у них есть и выбрал Ikea Dekad. Это единственное что подходило более-менее.
Я хочу сказать что этот лот с самого начала мне не очень понравился, думал что будут сложности. Но как же я ошибался! Девайс просто как будто придуман для самоделок. Красивый и ровный корпус, очень технологичный — минимум лишнего, внутри всё на болтах. Циферблат, рамка и стекло — отдельные детали, что позволяет развернуться полёту мысли. Сверху имеется дырка для привода звонка — который электрический и приводится в действие электромотором. Его можно оставить и например удивлять пользователя громким звонком, если CO₂ высоковат. Но я решил что это будет перебор :)
От оригинального будильника нам понадобится: собственно корпус, стекло, рамка (я так думал тогда, на самом деле — не совсем), гайки и ножки из нержавейки, а так же пипка от стрелки — мы её запрессуем в нашу.
Что мы узнали на данном шаге:
- Габариты прибора: цилиндр примерно 95 на 50 мм
- Диаметр шкалы
- Название приобретает суффикс от своей сущности: Galoped-dekad
Циферблат
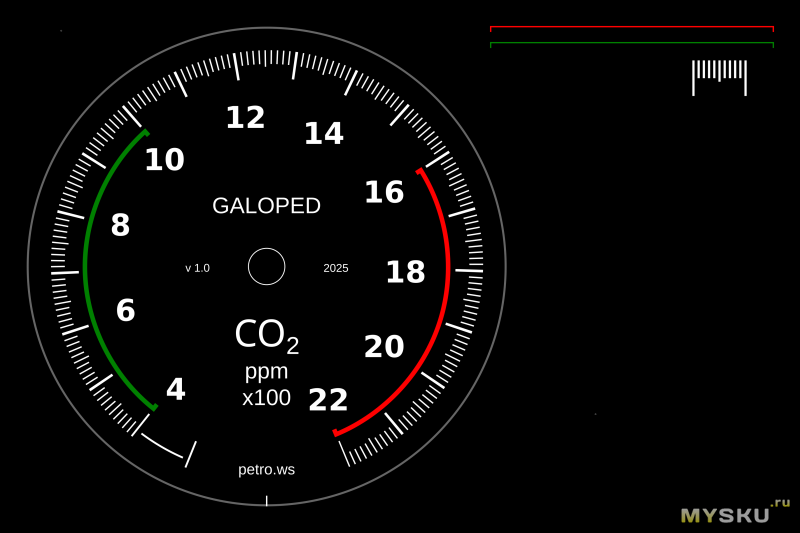
Лицо нашего прибора — тут всё должно быть максимально по красоте. У меня ушло на это больше времени чем планировалось. Начал с того что нашёл видео, где мужик делает круговую шкалу в Inkscape. Сделал по аналогии — у меня только более свежая версия, там были небольшие отличия. У меня ушло много времени что бы разобраться — для того что бы модификатор «Шаблон по кривой» работал — ваш образец кусочка шкалы должен быть одной целой кривой, тогда всё делается правильно. Документ делаем сразу под будку само-обслуживания фото-печати, под 10х15.
Открываем фотку авиационного прибора — нашего талисмана и вдохновляемся :) На самом деле на дизайн ушло несколько дней, плюс я его в процессе несколько раз менял — поменял отображение мертвой зоны, зеленые и красные секторальные линии сделал более похожими на реальный прибор.
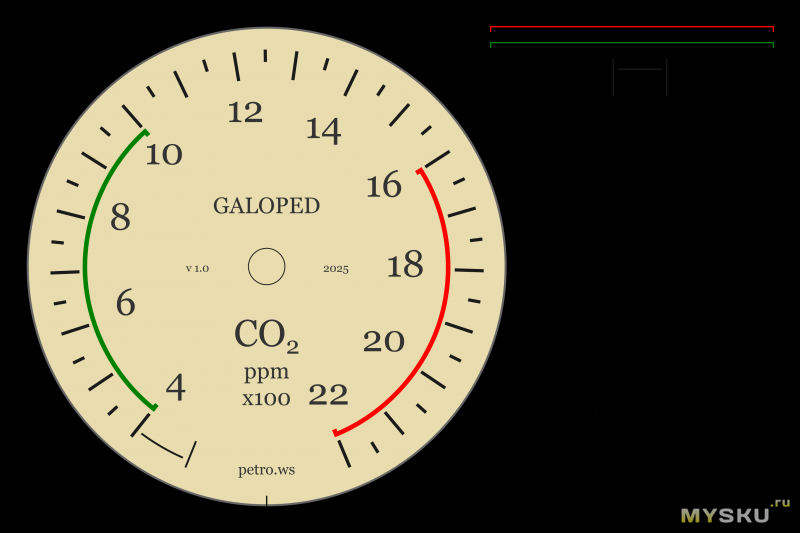
И, сразу делаем версию ретро:
Для дизайна шкалы мы должны определить минимальные и максимальные значения. Смотрим на даташит на наш моторчик x27.168 и видим что полный оборот — это 315° (на самом деле 320°, но на момент дизайна шкалы я этого не знал). Теперь прикидываем: у нас есть 315*12 шагов, надо захватить примерно подходящий диапазон и минимизировать вычисления (особенно деление). Так же нужно сделать небольшую «мертвую зону» (для индикации не-готовности прибора). Рассчитываем: оставляем 15° на отображение мертвой зоны, итого у нас остаётся 300° значащего диапазона. Разбиваем его на 18 кусочков, получается что мы можем отобразить от 400 до 2200 ppm, а самое главное, что при этом получаем ровное соответствие:
(300*12) / (2200-400) = 2Идём в DM и печатаем нашу чудо-полиграфию в будке. У нас это удовольствие стоит примерно 30 копеек при печати малыми тиражами. У нас при печате в будке есть только глянцевая фото-бумага, матовую надо заказывать. Я думал что это проблема, планировал сбрызнуть матовым лаком — но это не нужно, всё выглядит супер и так.
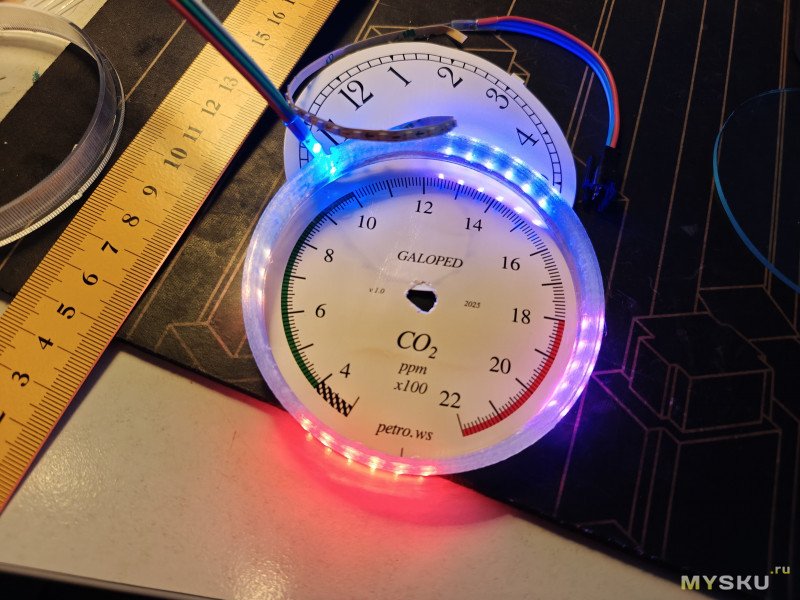
Дальше сталкиваемся с проблемой — а как нам сделать красивую дырку в центре, что бы это не выглядело как колхоз? Я пытался просверлить или прорезать, получилось так себе. В итоге решение пришло такое — я заказал на Amazon пробойники для кожи. Просто пробить молотком получается плохо, но если зажать пробойник в патрон шуруповерта и «просверлить», то получается идеально ровное и красивое отверстие.
Подсветка
Вот тут я больше всего провозился в итоге. Изначально план был простой — в Икеевском будильнике штатная рамка как будто прям сделана для подсветки, она полу-прозрачная, изнутри накатка — выглядит супер. Но на деле оказалось всё не так просто.
Сразу стало очевидно что обычная светодиодная лента годится слабо — хотелось что-бы подсветка выглядела «лампово», то есть без видимых диодов. Для этого было решено приобрести гибкие филаментные нити на 3 вольта. Выглядят отлично, светятся тоже. Я взял вариант где выводы на одной стороне трубки — не делайте так, монтировать потом очень неудобно. Следующие версии буду делать на лентах с подключением с разных концов.
Приклеиваем прозрачным скотчем к оригинальной рамке и смотрим. Выглядит плохо — из-за того что рамка прижата к стеклу напрямую — получаем яркое гало вокруг циферблата. На фото это не так страшно выглядит, но в реальности всё сильно хуже.
Для RGB подсветки приобрел 2.7мм ленту с адресуемыми диодами WS2812b. С оригинальной рамкой проблема та же — они дают тоже резкое гало вокруг циферблата, а так же выглядят ещё хуже — от диодов подсветка выглядит очень точечной, на реальные приборы мало похоже.
Я пробывал распечатать своб рамку из белого пластика, что-бы получился рассеиватель, но помогает слабо. На фото пример такого варианта. В итоге гало можно немного уменьшить, если диодную ленту клеить диодами наружу — но они всё равно светят сквозь ленту.
Пример рамки из «прозрачного» пластика, как видите тоже — так себе. В этом разделе довольно кратко, но я напечатал и проверил кучу вариантов, с диодами внутри кольца, снаружи, ближе к стеклу и циферблату — результат плохой.
В итоге решил так: сделал рамку из двух частей — черного тонкого кольца под стекло, что-бы погасить гало, полупрозрачную часть обмотал изнутри белой изолентой для приглушения диодов. Мне не нравится и такой вариант, но выглядит уже в целом сносно.
На фото пример с RGB лентой, изолентой и промежуточной черной рамкой. Подробности можете посмотреть на 3D моделях. Филаментная лента встаёт в ту же рамку без модификаций.
Адресуемые диоды так же поззволяют делать разные эффекты, например секторальную подсветку или менять цвет в зависимости от показаний прибора. Секторальная смотрится в целом плохо — она даёт яркий блик на противоположную сторону прибора.
В итоге оба варианта подсветки ставим в двух-составное кольцо, каких-либо эффектов в стоке предоставлять не будем, вкл-выкл да регулировка яркости. Тут конечно есть ещё много чего подумать, но думаю отложу пока до следующих версий.
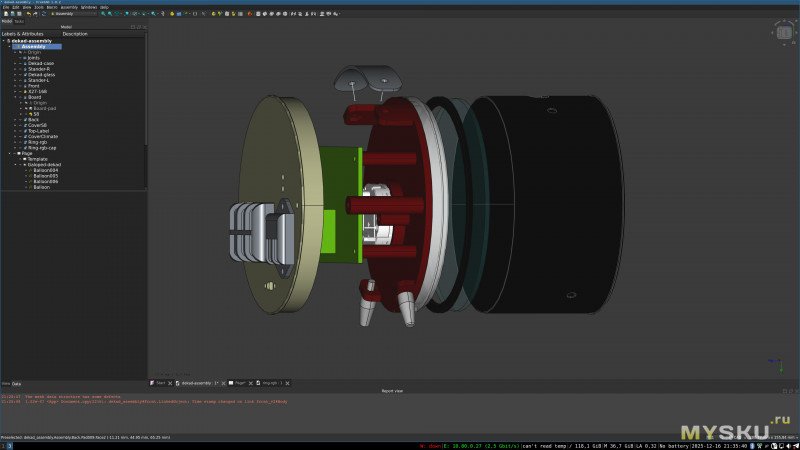
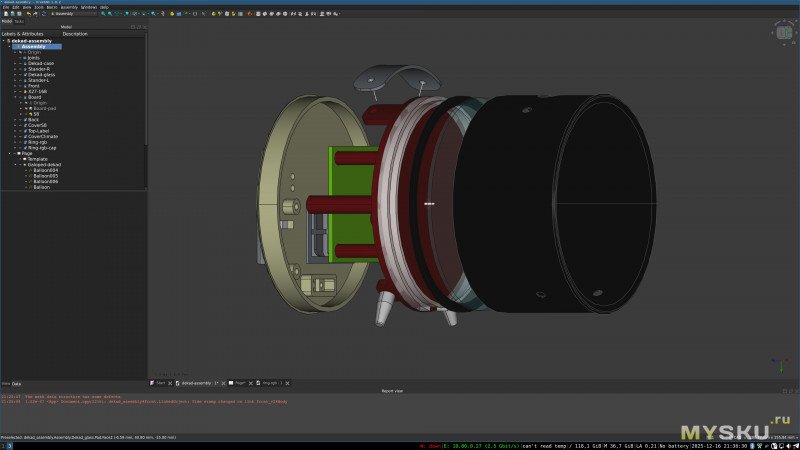
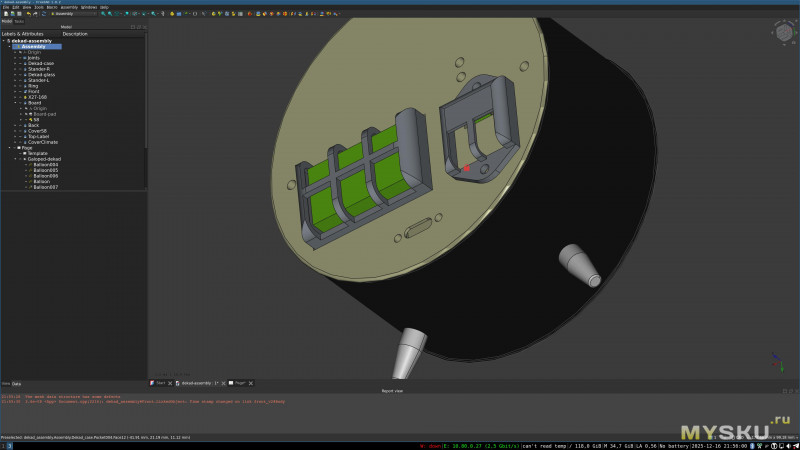
Корпусные детали
Теперь самое время сделать пластиковую часть нашего чудо-прибора. Большая часть видимой компоненты (корпус, циферблат) у нас уже выглядят хорошо, осталось только позаботится о задней стенке, стрелке и закрыть дырку наверху корпуса (от механизма звонка). Открываем FreeCAD и приступаем к черчению наших деталей. Кстати, я думал что довольно неплохо знаком с данной CAD-Программой, но решил перед началом посмотреть обучающие видео, нашёл канал Димы Гога тоже из Германии, и просто офигел — я не знал можно сказать ничего. Большое спасибо ему, я сделал всё что нужно гораздо быстрее. Всем очень рекомендую, кто хочет научится делать красивые детали быстро и эффективно.
Стрелка
Итак, шкалу сделали, но что по ней ездить должно? Я над этим долго думал, гуглил по форумам. Там предлагают много чего — вырезать из старой карточки, пробивать, выпиливать руками из металла. Я решил всё-таки попробовать напечатать аккуратно на 3D принтере с максимальным разрешением. Если печатать вверх ногами на хорошей подложке то поверхность получается ровной, по ней даже не видно особо — что она печатная. Я в процессе поиска оптимальной формы и технологии сделал наверное штук сто этих стрелок, они у меня теперь валяются повсюду.
У меня есть любимый лак из Lidl — краска для глушителей. Она даёт прикольную матовую поверхность, я сразу решил черную часть стрелки сбрызнуть именно им. Печатаем, красим — сначала попку, потом саму стрелку белым лаком, который подрезал у своей Фрау.
Получается примерно так. Я изначально хотел заморачиваться с краской, которая в темноте светится, но потом не стал делать — лучше сделать подсветку всего прибора. Так что просто красим доступными красками / лаком и получается хорошо.
Теперь важный момент — берем оригинальную пипку от икеевского будильника, сверлим 1.8мм дырку в стрелке и запрессовываем в тисках пипку в нашу стрелку. Получается здорово — наша стрелка выглядит уже почти как настоящая в самолёте. Кроме того — она идеально плотно насаживается на вал мотора, ничего мудрить с креплением не надо. Ретро-версия стрелки выглядит почти так же и не окрашивается вообще, печатаю сразу черным пластиком.
Интерьер
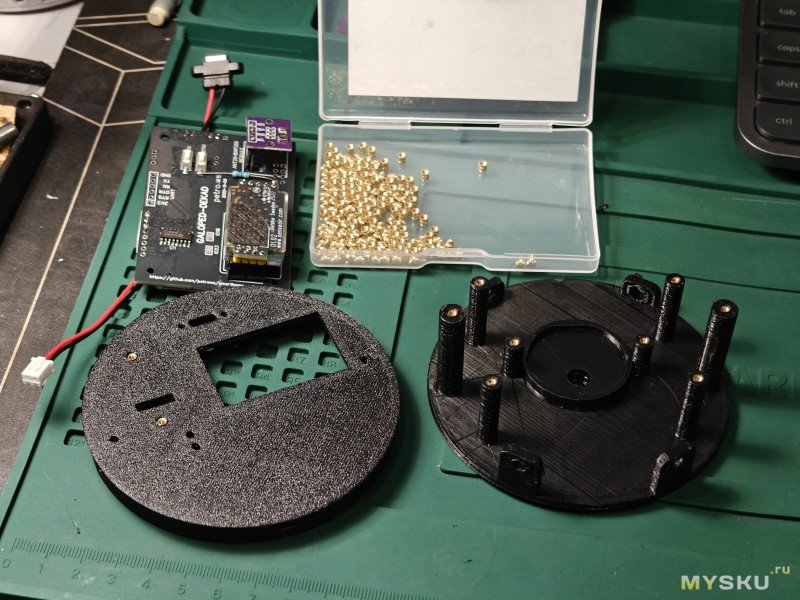
В целом, прибор состоит из деталей: рамка (если комплектация с подсветкой, иначе используем оригинальную ikea), передняя панель с седлом для мотора и платы, задняя крышка, крышечьки для датчиков S8 и Климата (если устанавливается).
Вот так выглядит сборочный чертёж. Совмещаем детали, крутим-вертим и смотрим — что-бы все дырки совпадали, ничего не мешало друг другу. Из хитрого оказалось только разве что вычислить — где точно находятся дырки крепления в икеевскоом корпусе: они разнесены на 30° и 34° от вертикальной оси.
Отдельно пришлось повозиться с крышечьками — для датчиков S8 и климата. В итоге остановился на таком — крышка S8 вставляется изнутри и держится просто прижимом (или можно капнуть клея для верности), датчик климата ставится на болты к крышке. Так как оба датчика — опция, то крышки могут не устанавливаться (у меня пока что никто не просил версию без измерения CO₂ на борту, в этом случае надо будет сделать особую крышечьку — или просто удалить дырку под него).
Так же на этом этапе генерим 2D-чертеж, для инструкции для будущих пользователей :) Я для этого создал Page во FreeCad и разместил там нужный View с изометрическим видом продукта, осталось только экспортировать куда следует.
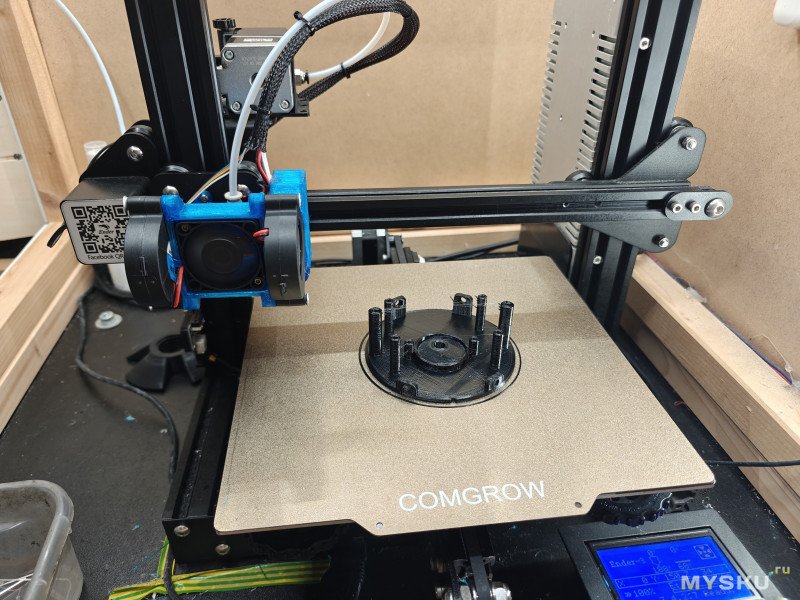
Печатаем все детали, снмиаем и очищаем. Прототипы делал из PLA. Все детали финального устройства печатал пластиком PETG черного цвета, рамка подсветки из «прозрачного». Корпусные детали и рамки — 0.2 мм слой, заполнение 20%, обдув 20%. Крышечьки датчиков и стрелка — 0.1 мм слой. Обязательно включите ironing для получения красивых плоских поверхностей, особенно которые торчат наружу.
Крепёж
Изначально я всё собирал на саморезах М2.3 для пластика, но быстро надоело — выглядит хуже, вопросы к прочности, добавляет «дешевизны» к виду нашего серьёзного спец-изделия. Специально для устройства обзавелся болтами М2 и М3 с головкой под шестигранник из нержавеющей стали. Крепление в пластик будет на вплавляемые втулки — просто изумительная штука оказалась, как я без них жил раньше?
Винтики выглядят куда более солидно, придаёт ещё немножко «авиационного» стиля. Кое-что нужно взять от икеевского будильника (гайки и шайбы М3, пару саморезов М2 для врепления USB-C порта, если у вас нет своих).
Окончательная сборка продукта
Итак, давайте теперь соединим всё вместе! Наконец-то увидим, что за франкенштейн у нас тут получается. Выбираем комплектацию для сборки: Авиационный стиль, подсветка ламповая, оба датчика установлены.
Для сборки у нас уже должны быть все детали, что остались от предыдущих шагов или изысканий. Ну или просто печатаем новые на 3D и 2D принтерах, заказываем платы, разьёмы, провода. Раскладываем это всё на столе и любуюмся. Для сборки нужно вообще следующее:
- Будильник Ikea DEKAD
- Печатные детали: передняя и задняя крышки, верхняя крышка, крышечька датчиков CO₂ и климата, две детали рамки подсветки
- Крепёж: Винты M3 (2 шт), Винты M2 (10 шт), Втулки для пластика M2 (10 шт)
- Филаментная лента подсветки (26 см или длиннее) и провода к ней
- Печатные платы: основная и двигателя
- Двигатель X27-168, выводы на задней стороне
- Модуль ESP32-WROOM32E (4Mb)
- Чип VID6608
- Датчик SenseAir S8
- Датчик климата — AHT20 / BMP280 модуль
- SMD кнопки 3х6, высота любая — у меня 4.5 мм
- Разъёмы JST-PH 2.54 и провода: 2-pin (2 шт), 4-pin (1 шт). Мне обжимать впадлу, взял уже обжатые
- Разьём питания USB-C
- Провода, гребенки, паяльник, хорошее настроение и решительность :)
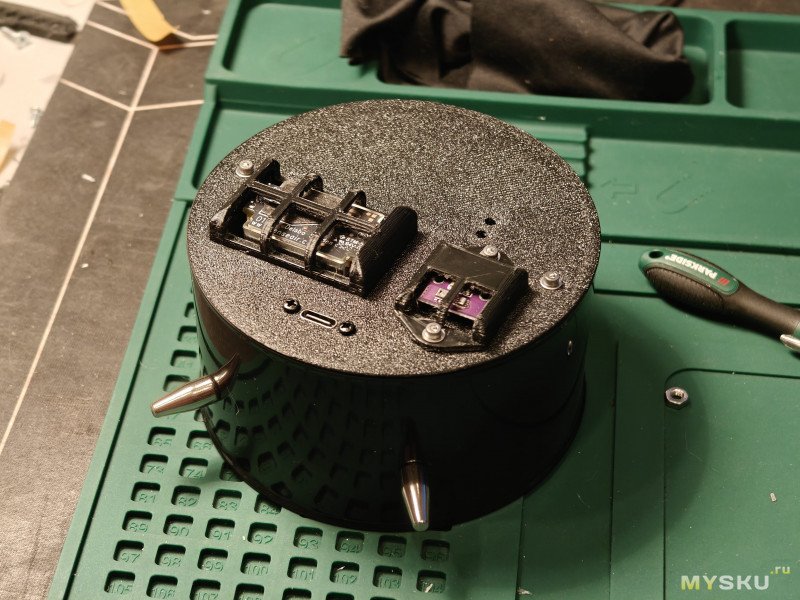
Первым делом устанавливаем кристалл ESP32. Я заказывал без установки оного, т.к. у меня они были и не хотел рисковать возможным браком. Потом всё проклял — установка лютый геморрой, один модуль запорол. Заказывайте установку на заводе вместе с платой — будет тоже самое по цене и гемора намного меньше.
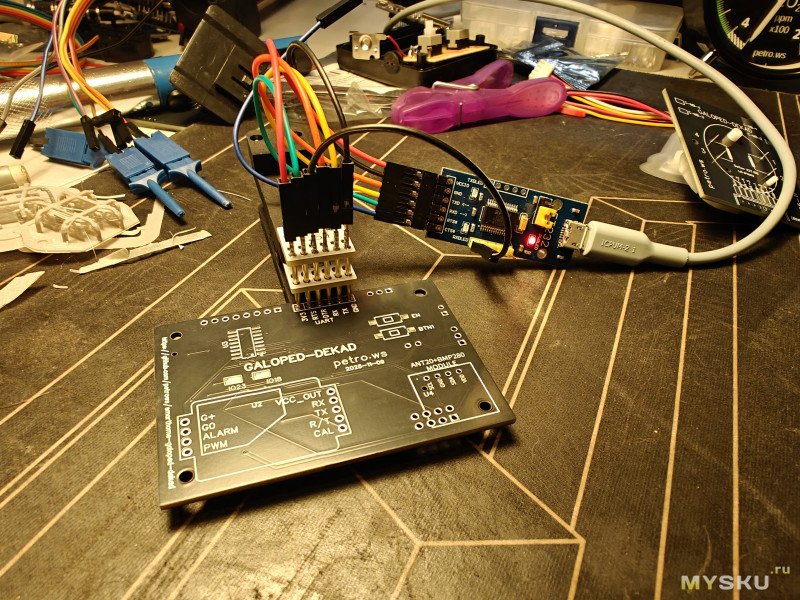
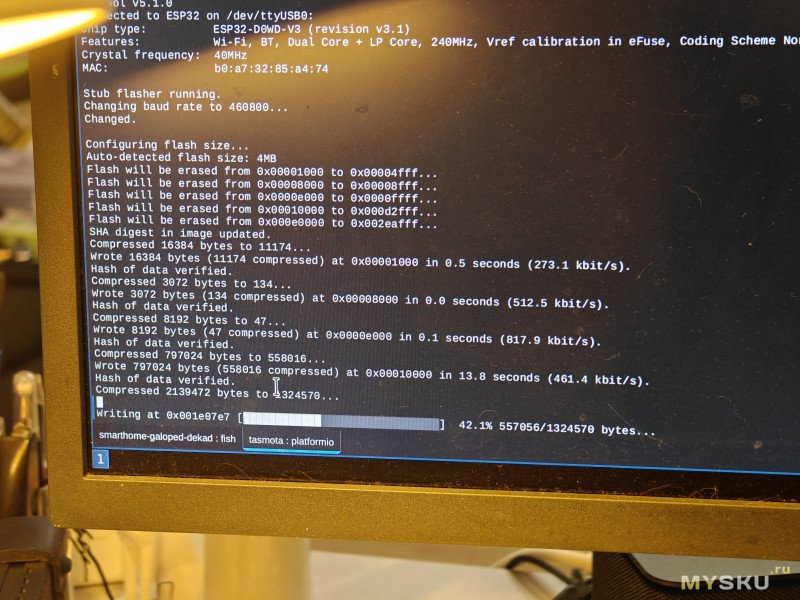
Сразу после установки важно проверить работоспособность — заливаем прошивку и проверяем что прибор приходит в сознание. Можно залить любую Тасмоту, потом закатаем что нужно по воздуху. Я использую данный адаптер, он имеет нужные выходы RST и DTR (обратите внимание что DTR вынесен на боковую гребенку — я сначала тупил и перепутал его с CTS и испортил одну плату, думая что сотворил непотребное). В этом случае чип прошивается напрямую через esptool или platform.io. Если такого адаптера нет, то подойдёт любой, главное что бы был совместимый с 3.3В, контакты для входа в режим прошивки коротите тогда руками. Питание лучше подавать внешнее — 3.3В в моей версии отладочного разьёма от адаптера хватало для прошивки, но уже не хватало для первого запуска. В вашей версии платы эта проблема решена (выведено 5В), но в любом случае лучше внешнее питание рекомендуется — вдруг что. В этом случае подключаем только землю от адаптера, иначе можно попалить.
Ура! Кажется что мы ничего не запороли. Пока что :)
Запаиваем остальное — разъёмы и собсвтенно нашего героя дня — VID6608. Его ставить куда легче чем ESP32, накосячить сложнее. Обязательно прозванивайте ноги после установки! У меня всё выглядело супер, но половина ног на деле не звонилась. Если плохо припаяли то будет выглядить так: привод будет дергаться хаотично вместо плавного движения. Устанавливаем всё остальное — разъемы кнопки и прочее.
Устанавливаем гильзы под винты M2. Установка очень прстая — ставим на отверстие и вдавливаем пяльником, всё получается ровно и красиво.
Запаиваем наш моторчьик на плату крепления и ставим разьём. Дырки под гребенку можно рассверлить и просунуть провода туда для лучшего удержания.
После установки привода можно вырезать и приклеить лицевую панель. Подготавливаем стрелку, прессуем в неё пипку и красим. После этого можно собрать всё вместе.
На данном этапе нам важно выставить стрелку точно в ноль. Для этого натягиваем стрелку как получится (ставится она очень туго, не стесняемся), потом проворачиваем моторчик до упора (без сигнала он свободно крутится) в нуль и проворачиваем аккуратно стрелку, пока она не будет точно в начале мертвой зоны, это истинный ноль шкалы.
Разбираем будильник, снимаем с него всё ценное, удаляем наклейку и чистим. Получается красивый глянцевый цилиндрик. Стекло аккуратно вынимаем и желательно не ляпаем — жирные следы пальцев потом будет сложно убрать.
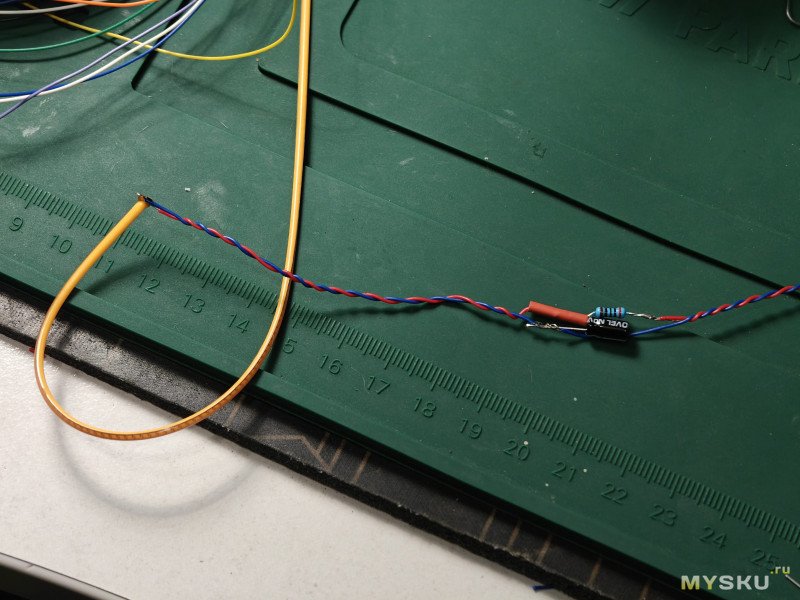
Готовим филаментную ленту — припаиваемся к выводам под прямым углом и мастрячим разьём. У меня так же припаяна корректирующая цепь: редистор на 220 Ом и конденсатор подавления пульсаций. В версии платы, что вы увидите в EasyEDA данные детали уже установлены (на момент создания самой первой версии я ещё был в сомнениях по поводу подсветки).
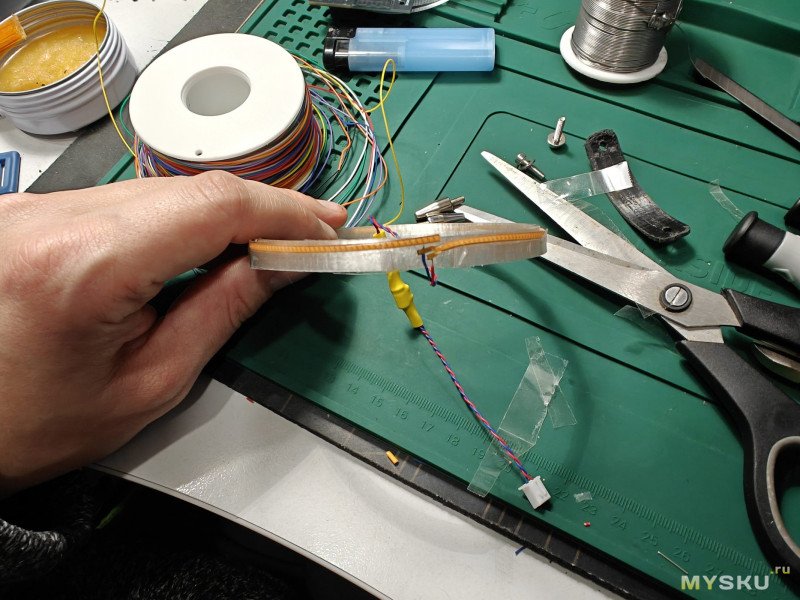
Устанавливаем ленту в рамку, лучше всего развернуть её «мутной» частью внутрь. Для удобства можно подклеить прозрачным скотчем. Так же подкладываем немного скотча между лепестками контактов для изоляции, нормально запихнуть в теормоусадку нет места. Подрезаем ленту так, что бы ровненько сходилось — у нас тогда будет минимальный темный кусочек подсветки.
Вставляем в корпус стекло, черную рамку и нашу рамку с лентой. Важно поставить в праильной ориентации — детали сделаны так что бы входили в тугую посадку (что бы не дребезжало ничего) и провернуть потом может быть трудно. Провода должны выходить ровно снизу посередине, что-бы попасть в вырез основной детали.
Устанавливаем основную корпусную деталь, пропускаем провода подсветки. Теперь можно закрутить основные наши крепёжные магистрали: ножки и болты M3 через верхнюю крышечьку.
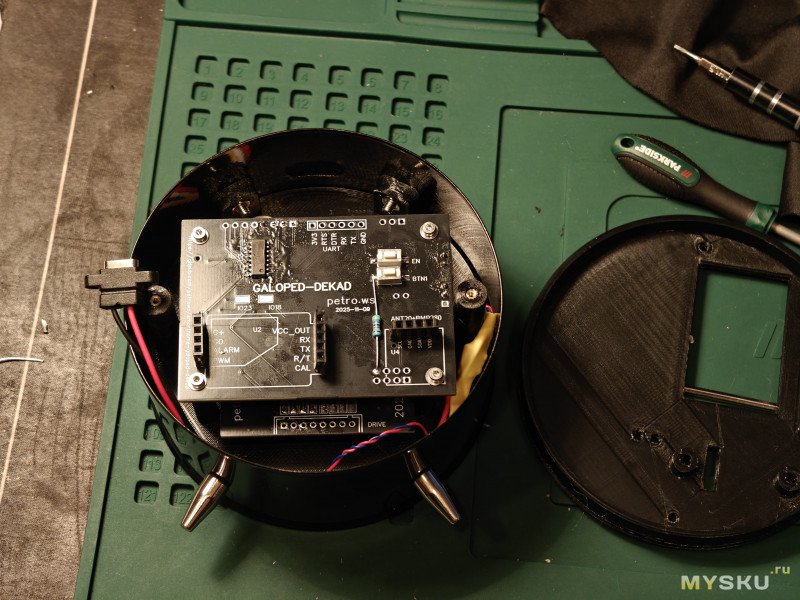
Подсоедияем все разьёмы и устанавливаем основную плату, ориенируем её датчиками вниз. Закручиваем всё красивенькими винтами М2.
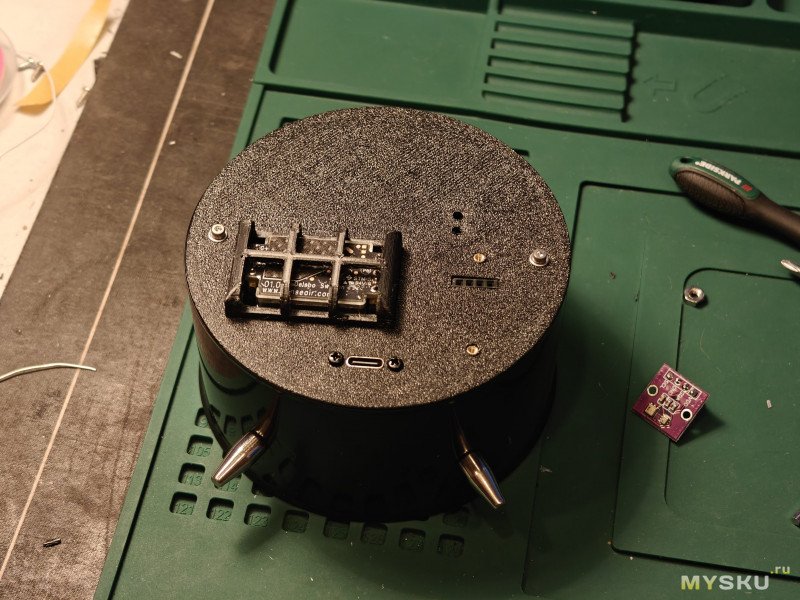
В задней крышке привинчиваем разьём USB-C на шурупчики, просунув его изнутри. Можно использовать оригинальные серебристые Ikea от будильника, но у меня есть анодированные черные, они выглядят получше. Устанавливаем решётку датчика S8, сам датчик и помещаем крышку на место, прикручиваем всё на два винта М2.
Натыкаем наш климатический датчик на разьём и прикручиваем крышечьку сверху на ещё два болта М2. Сборка завершена :-)
Отдаляем на расстояние вытянутой руки, включаем и проверяем что всё работает. Обратите внимание что без начальной конфигурации прибор даже не будет вызывать калибровку «из коробки», нам необходимо настроить Тасмоту и подготовить агрегат к работе.
Конфигурация
Первым делом надо настроить наш «модуль». Какие ноги где сидят и что делалют. Для упрощения жизни я сделал темплейты (версия для RGB и Ламповых подсветок): отличия в одной ноге — она либо на WS2812B либо на транзистор диммера ламповой. Шаблон можно применить руками, но удобнее это сделать сразу в прошивке. Кроме того, нам понадобится парочка #define: по-умолчанию у Тасмоты нет поддержки ни AHT20, ни моего замечательного драйвера. Создаём файл tasmota/user_config_override.h:
// Required features for this project:
// [I2cDriver43] Enable AHT20/AM2301B instead of AHT1x humidity and temperature sensor (I2C address 0x38) (+0k8 code)
#ifndef USE_AHT2x
#define USE_AHT2x
#endif
// [I2cDriver10] Enable BMP085/BMP180/BMP280/BME280 sensors (I2C addresses 0x76 and 0x77) (+4k4 code)
#ifndef USE_BMP
#define USE_BMP
#endif
// Add support for SenseAir K30, K70 and S8 CO2 sensor (+2k3 code)
#ifndef USE_SENSEAIR
#define USE_SENSEAIR
#endif
// Add support for VID6608 Automotive analog gauge driver (+0k7 code)
#define USE_VID6608
// Reset VID6608 on init (default: true), change if you control this manually
#define VID6608_RESET_ON_INIT false
// Enable WS2812 leds number (any HW model)
#undef WS2812_LEDS
// If RGB backlight is used, it will have 40 LED's
#define WS2812_LEDS 40
// Template defaults, apply on flash reset.0
// You may skip this templay application, in this case please apply manually (see README.md)
// Read from file, generated by ./bin/build.sh or CI
#include "user/user_config_hw.h"
// Activate template on reset/flash new
#undef MODULE
#define MODULE USER_MODULE
Так же, для выбора уже конкретной комплектации выбираем один из двух вариантов в виде файла tasmota/user/user_config_hw.h:
/*
Part for Galoped-dekad hw version:
* Backlight: Retro
*/
#undef FRIENDLY_NAME
#define FRIENDLY_NAME "Galoped-dekad-retro"
#define USER_TEMPLATE "{\"NAME\":\"Galoped-dekad-retro\",\"GPIO\":[1,1,1,1,1,1,1,1,1,1,416,0,1600,1632,1,1,0,640,608,1,0,1,12160,12192,0,0,0,0,1,1,32,1,1,0,0,1],\"FLAG\":0,\"BASE\":1}"
, это было для ламповой, для RGB:
/*
Part for Galoped-dekad hw version:
* Backlight: RGB
*/
#undef FRIENDLY_NAME
#define FRIENDLY_NAME "Galoped-dekad-rgb"
#define USER_TEMPLATE "{\"NAME\":\"Galoped-dekad-rgb\",\"GPIO\":[1,1,1,1,1,1,1,1,1,1,0,1376,1600,1632,1,1,0,640,608,1,0,1,12160,12192,0,0,0,0,1,1,32,1,1,0,0,1],\"FLAG\":0,\"BASE\":1}"
Для ленивых: идём в раздел Releases моего проекта и качаем там готовую.
Остались уже совсем мелочи: надо всё проверить и присоединить стрелку к показаниям CO₂. К счастью, в прошивке ничего даже модифицировать не надо — у Tasmota имеется Berry script в версии для ESP32, так что просто напишем скриптик и закинем в агрегат. Для автозапуска надо именовать данный чудо-файл как autoexec.be:
# Connect and preare i2c FRAM MB85RC04V
var fram_addr = 0x50
var wire = tasmota.wire_scan(fram_addr)
# Address in FRAM to store last gauge position
var addr_pos = 0x0000
# Check initialization
if !wire
print("FRAM not found")
end
# Function to write FRAM memory, 2 bytes
def fram_write_u16(addr, data)
if !wire
return 0
end
# Split address and data into two bytes
var addr_hi = (addr >> 8) & 0x7F
var addr_lo = addr & 0xFF
var data_hi = (data >> 8)
var data_lo = data & 0xFF
# ---------------- WRITE ----------------
wire._begin_transmission(fram_addr)
wire._write(addr_hi)
wire._write(addr_lo)
wire._write(data_hi)
wire._write(data_lo)
wire._end_transmission(true)
end
# Function to read FRAM memory, 2 bytes
def fram_read_u16(addr)
if !wire
return 0
end
# Split address and data into two bytes
var addr_hi = (addr >> 8) & 0x7F
var addr_lo = addr & 0xFF
# ---------------- READ ----------------
wire._begin_transmission(fram_addr)
wire._write(addr_hi)
wire._write(addr_lo)
wire._end_transmission(true)
wire._request_from(fram_addr, 2)
var value_hi = wire._read()
var value_lo = wire._read()
var value = (value_hi << 8) | value_lo
return value
end
# Read last gauge position from FRAM
var last_gauge_pos = fram_read_u16(addr_pos)
if last_gauge_pos
print("FRAM gauge pos read:", last_gauge_pos)
end
# Call Reset option from saved position, and save zero
tasmota.cmd("GaugeZero " + str(last_gauge_pos))
fram_write_u16(addr_pos, 0)
# Function to update Gauge position on CO2 change
def co2_update(value, trigger)
var drivePos = 180 + ((int(value) - 400) * 2)
if last_gauge_pos != drivePos
tasmota.cmd("GaugeSet " + str(drivePos))
last_gauge_pos = drivePos
# Save current position into FRAM
fram_write_u16(addr_pos, int(drivePos))
end
end
# Add rule to monitor CO2 changes
tasmota.add_rule("S8#CarbonDioxide", co2_update)
Данный файл в репе. Функционально состоит из двух частей — чтение / запись в FRAM и функция чтения показания CO₂:
tasmota.add_rule("S8#CarbonDioxide", co2_update)Данный вызов вешает вызов кэллбека co2_update при обновлении. Как видите — проще некуда. Теперь наш прибор ожил и будет что-то показывать.
Так же прибор должен показывать показания датчиков и положение стрелки в веб-интерфейсе. В зависимости от комплектации будет либо диммер «ламповой» подсветки, либо выбор цвета для RGB. Дальше уже дело техники — следуйте инструкциям Tasmota что-бы настроить интеграцию в Умный Дом и прочее, наша прошивка отличается только базовой конфигурацией и все фичи доступны.
Стоимость прибора
Точную стоимость сильно зависит от кол-ва изготавливаемых экземпляров и что у вас есть уже в наличии. В моём случае чисто по железу получилось порядка 50€ за прибор, и это при условии что 3Д-принтер у меня свой и корпусные детали получаеются условно-бесплатные. Если кому-то нужен точный расчёт то пишите в каменты — добавлю в обзор.
Выводы и мысли на будущее
Вот такое у нас с вами получилось чудо техники — что думаете по поводу?
И руки размяли и подарить не стыдно. Ну и ещё в Тасмоту хороший драйвер добавили. Вообще, устройство конечно легко кастомизируется и адаптируется под суровую реальность:
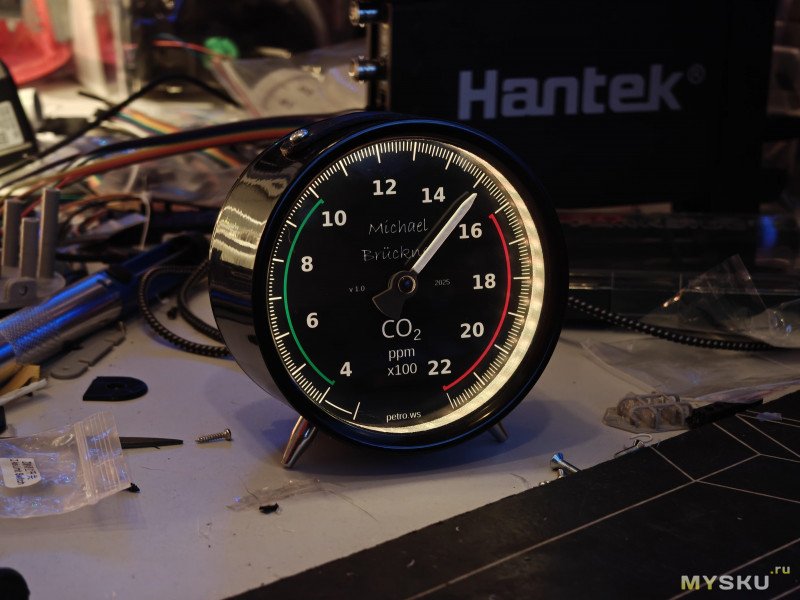
- Внешний вид: я написал имена людей на циферблате (кому дарил) — получается прикольный подарок в виде уникального гаджета, который в магазине не купишь;
- Прибор конечно может показывать что угодно, как с датчиков, так и с внешнего управления; Тут уже на что хватит воображения — температура, влажность, черти в ступе или остаток рабочего дня на сегодня
- На плате имеется разьём расширения, который может в себя принять в общем что угодно — I²C датчики, дисплеи и прочее;
- Плата может управлять двумя двигателями — как одним сдвоенным с двумя стрелками, так и двумя отдельно;
- Можно докинуть ещё одну VID6608 или заменить на VID6606 — в этом случае можно будет рулить сразу 4-мя приводами;
- Можно управлять оригинальным мотором будильника и громко звонить когда надо :-)
Что думаю надо бы в будущем улучшить (возможно когда вычитаете этот обзор то уже что-то сделано, см обновления в репе):
- Думаю что надо-бы добавить работу с FRAM в саму Тасмоту, это неудобно что мы читаем-пишем в скрипте, думаю можно сделать автоматическую запись и чтение при калибровке. Но вот не уверен что такое примут — наверное такой патч слишком уж специфичный;
- Надо разделить один 8-пиновый разьём для двух двигателей на два по 4: такое решение оказалось очень неудобное;
- Разъёмы все надо перевернуть на 180°, оказалось что невозможно поставить угловые при текущей компоновке — так было бы удобнее;
- Идея с Breakout-board для двигателя оказалось не очень хорошей — это сильно усложняет конструкцию и вообще бестолковое решение. Думаю хорошая универсальная печатная крышечька с креплением проводов напрямую будет получше;
- Надо-бы добавить индикацию статуса какую на плату, а то юзеру невозможно понять — она живая там вообще или нет;
- Использованный USB-C коннектор работает только с USB-A-C кабелем, USB-C-C не подходит. Не критично, но безусловно минус;
Исходники проекта: github.com/petrows/smarthome-galoped-dekad. В репе сейчас небольшой бардак из тестовых деталей и нет нормального Readme — не было времени прибраться, наведу порядок чуть позже. Но всё тем не менее есть.
Если у вас ещё есть хорошие идеи — делитесь, прикрутим. На этом всем желаю хорошего дня.
Самые обсуждаемые обзоры
| +44 |
2074
126
|
| +171 |
4059
100
|
| +52 |
2514
109
|
| +69 |
2924
83
|
и интересное!
это да. Но лучше некоторым людям показывать реальный масштаб проблемы)
Или вы про тесты из офисов? Берут офис, там все нервные, с давлением, на таблетках и причиной объявляют превышение нормы СО2 на 200 ppm
Другое дело что есть корреляция с фенолом, радоном, пыльцой плесени всякой, положительными ионами, в целом проветривать полезно. Но только если это не осушает воздух зимой, иначе будет вреда больше, чем пользы.
Обратный процесс быстрое дыхание чтобы галюцинации получить ))
Рост кислорода тоже влияет, летчики говорят вместо опохмела могли кислорода дыхнуть и все симптомы как рукой снимало ))
Роста кислорода дыханием особо не увеличить, его и так много 20%, а вот СО2 0.05% во вдыхаемом и 1% в выдыхаемом, частотой дыхания можно варьировать до 10% при задержке и до 0.05% при частом дыхании.
То что у пловцов прищепка на носу не означает что они не дышат. Глубина вдоха и потребление кислорода в целом больше чем у легкоатлетов. Вам такие количества потребляемого кислорода даже не снились.
Дышать как спортсмен 16-18 часов бодрствования не могут даже подготовленные атлеты. Дышать на максимум объема легких это достаточно тяжелая работа.
Когда СО2 будет 10%, то его вред будет намного больше, чем от недостатка кислорода, которого будет все еще 11%.
Чтобы вытеснить кислород это надо постараться, создав специфические условия, как тут
tass.ru/proisshestviya/7868599?ysclid=mje8h9uz7s233978754
Так что женщины в целом правы интуитивно. А циферки показомера ни о чем. Ну или сами подумайте, на выдохе под 100 000 ppm, на этом фоне не важно что на вдохе, все равно в легких смешается с остатками выдоха и будет та же смесь 50-100 тыс. PPM CO2, а что на вдохе особо не скажется.
1. там измеряли по узкому набору критериев. Просто способности выполнить боевую задачу
2. это никак не относится к самочувствию, типа сонливость, головная боль и подобное. Лично я прекрасно ощущаю разницу при 2000 ppm и после проветривания
3. там совсем небольшая выборка. Она статистически не значима
4. тестировали подготовленных людей. Более того, адаптированных к таким условиям. А не выборку из обычных людей
5. в том тесте было ограниченное время тестирования. А не 'весь день сидите при 2500ppm'
6. есть разные исследования на обычных людях, которые показывают резкое снижение продуктивности уже при 2500ppm escholarship.org/uc/item/222631x2
и правильно делают
ага. Главное верить :)
Про подводников поддержу. На современных подлодках просто адски сложные комплексы очистки-регенерации воздуха. Наверное, сравнимые с космическими. Не просто так, наверное?
А про утомляемость всё просто. Если вы в крупном городе, то посмотрите на людей в переполненном вагоне метро. Если без метро — то в любом закрытом бусике, едущем 10 минут без открытия дверей. Все стоят серые, злобные и пошатываются. Сами не отражают почему. Но стоит открыть форточку, задобрив соседнюю бабку (давайте пересядем и т.п.), то громко слышится ура с другого конца салона ) Все вздыхают свободно.
Вы старательно пробуете подтянуть своё заблуждение против общеизвестных фактов. Земля — круглая (ну, геоид). Солнце — не центр Вселенной.
С вами даже спорить никто толком не станет.
То есть вред примерно оценивается в районе 10 000 — 100 000 ppm. Диапазон примерно тот же, что и у моряков тестировали. А не бытовой.
Если без побочных эффектов можно поддерживать в помещении 500 ppm это было бы прекрасно (заодно формальдегиды и радон вылетит и положительные ионы «душные» и прочее). А когда устраивают сквозняк и снижают проветриванием влажность с 40% до 10% это имеет свои минусы. Еще шум от вентиляционного оборудования в области инфразвука может панические атаки вызывать, разрушение психики. Если приточка с подогревом и увлажнением это дорого и может легионеллу распылить с последующим летальным исходом.
Ну и кстати подумал, вот стоит дыхнуть на датчик СО2, его зашкаливает минут на 5. Кто хочет снизить СО2 в легких могут не дышать выдохом своим, вдыхать слева, выдыхать справа, это будет аналогом снижения СО2 до минус 5000 ppm )) Или кто спит лицом к стене в своем углу могут надышать на глазок +5000 (датчик зашкалит уверен), хотя в помещении будет нормально. Если бы человек так боялся СО2 то в легких была бы сквозная вентиляция, как у птиц, те на 10 км интенсивные нагрузки выдерживают, где кислорода нет почти.
Свежий воздух полезен, но вот гнаться за 600-800 ppm и городить систему вентиляции ценой в половину дома это перебор. На форумхаусе такие есть, у них там на увлажнение сотни литров воды в день уходят и т.п.
Слабый полемический приём.
Приводя в пример шахтеров, шарфы и маски каким образом это можно приплести к категории безвредно? Это ВЫНУЖДЕННАЯ мера. Шахтерский труд всё еще категорируется как вредный. Маскам нет замены. Аэрозоль задерживает отлично. А хождение без шарфа заканчивается обморожением.
Приводить в пример людей из горных регионов это вообще смешно. Достаточно самому попасть в горы хоть раз. Нормально живут там только местные народности у которых мутация в генах(например EPAS1) меняет форму и работу гемоглобина.
проветриваем так влажность не снижают
ИИ говорит такое об исследовании
То что статья 2012 года и всего 22 участника признак того что тема мутная и особо никому не интересна. На уровне гомеопатии, иглоукалывания. Явно плацебо эффект, но поэтому им позволяют печатать околонаучные статьи с подгоном статистики под себя, чтобы скидывать в эту область мнительных внушаемых пациентов.
На Хабре подробно тема расписана
habr.com/ru/articles/712648/?ysclid=mje6cxwxuv272639705
тайные заговоры и прочее — это в других форумах. Если вас исследование не устраивает — опровергните результат
я вам уже ответил на это. И показал, почему те тесты к нашему обсуждению подходят слабо. Заметьте, при этом я те тесты не опровергаю
mysku.club/blog/diy/105343.html#comment4765802
а вы — вам. Удивительное дело :)
валидность вашего теста с военными ничем не лучше. Но есть две большие разницы — тест военных слабо относился к тому, что мы обсуждаем, мой тест — напрямую. Эффекты на 2500 ppm у них очень заметные. Причем для большей части участников. Никакими — 'знал о тесте' это нельзя обьяснить. Тем более, они не знали — там прямо в статье 'участники и человек, проводивший тест, были не знали об уровне CO2'. В плане запаха — тоже нет. Там использовали ультрачистую инжекцию СО2
это говорит строго об обратном. Что этот вопрос интересовал людей уже давно. А что я нашел статью 2012 года — просто первое что попалось :) На муське этот спор фиг знает сколько времени уже. И каких там только статей не находили
строго наоборот. См. выше
ИИ говорит такое об исследовании
То что статья 2012 года и всего 22 участника признак того что тема мутная и особо никому не интересна. На уровне гомеопатии, иглоукалывания. Явно плацебо эффект, но поэтому им позволяют печатать околонаучные статьи с подгоном статистики под себя, чтобы скидывать в эту область мнительных внушаемых пациентов.
На Хабре подробно тема расписана
habr.com/ru/articles/712648/?ysclid=mje6cxwxuv272639705
Влажность снижают проветриванием как-раз, подробно тут
habr.com/ru/articles/432536/?ysclid=mje6p9yk23241639695
Без проветривания интенсивного влажность подрастет за счет источников влаги в помещении.
У меня кстати в закрытых помещениях выше 2-3 тыс. показания не поднимаются, есть небольшие щели в дверях и окнах и этого хватает для циркуляции воздуха, по крайней мере для 1 человека хватает.
Свыше 5000 ppm может пригодится в тепличных хозяйствах, при выращивании цветов например, там обратная задача, поддерживать высокую концентрацию СО2, чтобы растения лучше росли.
Помню, в детстве зачем-то купил барометр (аналоговый, есс-но). Висел на гвоздике, водил стрелкой )) Пользы — ну никакой!
Интересно, сколько ТС лет, раз не наигрался. Но нравится, лайкнул, конечно.
Шкалу там, судя по всему, попозже прилепили новую, ну и ладно
Всё равно интересно. «Новая шкала» для нас — пошёл и распечатал на принтере. А сто лет назад? Как, зачем?
Размерность — очень важная составляющая в работе ну, теорфизика. Он может сочинить огромной сложности трёхэтажную формулу (в ядерной физике даже больше), которая верифицируется размерностью. Засранцы даже на безразмерные вычисления перешли, прикиньте.
А шкалы меняют редко. Болезненный процесс.
Одна отдельно взятая метеостанция со всеми её датчиками не может (( Она же не знает, откуда сейчас хана придёт.
Они пытаются, конечно. Активно пытаются пикать в облака, ловить их движения. Но это же слёзы, без глобальной-то сети.
Но бабушкины секреты мы знаем, конечно ))
А локально это вполне работает.
© «ДМБ»
За подход отдельный респект, оверинжиниринг дикий, конечно, но мне-ли судить, создателю камина с деталями от 3d принтера)))
на муське есть несколько обзоров, например этот
ЗЫ. а ещё есть EL-бумага, из неё иногда подсветку приборок в машинах делают
А читал окол 30 минут и понял, что я сдаюсь :)
Дочитаю позже. Это надо осмыслить…
Дочитаю позже ©
«Война и мир» получилась: половина на «французском» и куча ссылок с толкованиями.
Переструктурировать бы:
1. список железа
2. схемы
3. скетчи
4. подсветка.
5. общий вид, демонстрашки…
6. список литературы :))))
Кстати я так и не понял, как сделана шкала прибора — печать на бумаге? Литография? Травление?.. :)
Не знаю, с моей точки зрения как раз естественное повествование — от общей идеи к R&D и потом уже, собственно, к деталям реализации, ещё и везде с внятными объяснениями почему именно так, а не иначе. Эталонно, можно сказать, вопросов вообще не остаётся.
Понятно что все мелочи невозможно описать, кому-то будет мало именно информации по ПО наоборот. В целом всё хорошо и можно далее самому разобраться.
Мнит себя первой в мире. Как вы это терпипите, оо
С другой стороны люди, которые потеряют сознание от 10 сек без вдоха. Статистика по утопленникам подтвердит.
Не так давно встретил датчик СО2 тож с оригинальной механической индикацией www.birdie.design/
Прикидывал, но врядли возьмусь повторить в обозримом будущем(
Ну и цена у нас он от 200 евро предлагается — для моего девайся я боялся писать цену, думал 50€ уже цена запредельная.
ПС кто ламповости хочет, смотрите на канале Дмитрия Коржевского его вариант СО2 индикатора. Да и автору сего опуса стоит понять, что подобные текстовые длинные версии уже не котируются в наше время, надо видео снимать.
У нас немножко разные цели с автором, у него классный советский пост-панк, у меня больше закос на авиационную тематику + хотел добиться какой-то технологичности (то есть девайс должен быть легко повторяемым на доступной современной компонентой базе и технологиях — то есть 3д-печать и заказ компонент в магазине).
Про видео — есессно это я понимаю, но видео мне снимать лень, а текст писать больше нравится. Если хотя-бы один человек прочитает — то я своё дело сделал не зря, мне уже достаточно. Пусть блоггеры своим делом занимаются и часовые видео снимают — я только за них порадуюсь :)
Вот этот проект тоже можно на Ютуб залить, хотя бы сделав слайдшоу и немного видео работы, я бы сразу лайки поставил и комменты в поддержку. А там бы Ютуб и других подтянул зрителей.
То что он использует какую то коробку и вас тригернуло советским пост панком это говорит о вашем восприятии информации по внешнему факторам, обертке. Самое ценное в его роликах это схемотехника и то что он разжевывает её, а уже корпус и остальные это его фирменный стиль. Любой другой может делать по своему.
Сейчас одни спецы которые на простую задачу везде лепят Ардуино и используют покупные изделия. Это дань эпохи потребления.
С вашими руками и желанием просто рекомендовано к просмотру, как он сам говорит, его ролики это как спокойный ночи малыши для радиолюбителей
Я сам не люблю перебор когда пихают Ардуино везде, даже там где можно было бы сделать намного проще. В этом девайсе Ардуино в оригинале тоже не используется, если что — я сделал совместимую библиотеку из-за того что его использует Tasmota как слой внутренней совместимости для поддержки esp8266 на одной кодовой базе, на ESP32 же используется FreeRTOS (она кстати так же используется в оригинальном пакете разработки от Espressif — ESP-IDF), и прибор очень легко переделывается на оригинальное SDK, но: а) для законченного вида устройства нужно пилить свои велосипеды с интеграциями и интерфейсами, а делать это мне конечно же лень, б) это существенно снизит технологичность, гораздо лучше если девайс работает на основе чего-то широко-известного, чем очередной самопал с непонятно как сделанной прошивкой без комментариев (этим тоже очень часто грешат DIY).
Дань эпохи потребления — это смотреть учебное видео вместо вдумчивого чтения :-) Я сам учился по книгам типа «Искусство Схемотехники» (ещё советские издания).
К чему написал? А то что должен быть баланс, грамотная оценка задачи, ресурсов и не использовать перерасход этих ресурсов.
но зато со свой колокольни рассуждаете где кому как учить. если я чего то не сказал значит этого не было? какого-то общего представления не получилось выстроить?
Ещё мой любимый пример — в делах любительских лучше поставить МК чем 555-й таймер. Ну просто потому что на МК можно программно период поменять. И да, обычно это будет значить какой-то из вариантов ардуины, просто потому что, скорее всего, даже без своей платы тогда можно обойтись, а на единичной поделке стоимость того и другого близка к нулю.
«Можно, а зачем?»
Ну я теперь видел всё )
моё возбуждение было по архитектуре работы прибора, есть датчик СО2, есть индикатор — стрелка. по моему представлению датчик и стрелка должны работать напрямую, и параллельно к нему уже подключается любой контроллер, это если нужна версия с умным домом и т.п., а у вас в архитектуре всё завязано на проц
Про архитектуру — да, у меня завязано всё на MCU, я написал про это немножко в преамбуле — девайс задумывался как универсальный показометр, CO₂ тут скорее как пример и что-бы законченный девайс подарить, а потом вам показать. Поэтому сильно обращать внимание именно на CO2 не надо — я думал что эта отписка поможет предотвратить срач в каментах.
Текстовые версии ещё как котируются — у аудитории. Вот у авторов, к сожалению, не очень.
Но справедливости ради есть просто мощнейшие видео, у меня из любимого — Канал где чуваки аппаратуру Аполлона восстанавливали и работать заставляли, мои поделки это детский сад конечно по сравнению. Но тут имхо сравнивать всё равно не дело, у них R&D, у меня скорее гайд по сборке.
youtu.be/SH3lR2GLgT0?si=6NoJ-EXqTSukLSRc
Лови плюс в карму!
и потом по таймеру через заданный же период времени.
Сам я такое не пробовал правда, давно руки чешутся, но повода не находится.
«Идея — как вирус: живучая и очень заразная. Самое маленькое зерно идеи может вырасти. Оно может вырасти настолько, что определит тебя или уничтожит»
спасибо за труд и воплощенную идею!
«не оживил » это про пилота, череп которого так и не дождался оживления прибора?
— Что это у вас на часах 2 часа всё время?
— Это манометр
Прочитал с настоящим интересом. Спасибо!
Зато могу точно сказать, что люди захотят от игрушки. Вы же её где-то выставляли, судя по фото? Захотят «было-стало». Нужна метка на какой-то момент времени для сравнения с «после проветривания», «сегодня лучше чем вчера». Просто метка, хоть механическая. Своими руками выставил, своими глазами сверил. Магия соучастия )
Предпочёл бы секторную подсветку вместо секторальной.
https://www.ozon.ru/product/detektor-uglekislogo-gaza-dadzhet-izmeritel-co2-datchik-co2-analizator-vozduha-227430204
"- Значит, срочно ко мне креативную группу.
— Какую группу?
— Аня, креативную, креативщиков: Лёшу, Славу, Сашу.
— Я здесь!
— Саша, я же сказал, отдашь потом. Сашу не надо, он уже здесь. Лёшу и Славу.
— А что, Слава тоже креативщик? Я думала, он нормальный мужик!
— Анечка, сколько раз тебе можно объяснять, что слова «креативщик», «саундпродюссер», точно так же как «гомеопат» или "педиатр" — никакого отношения к человеческой сексуальной ориентации не имеют! Всех сюда позови!" ©
«День радио», спектакль
От себя хочу только поворчать на предмет принципиальной схемы. Вернее ее вида. Все понимаю, современные программы моделирования «все в одном» позволяют создать принципиальную схему, а на ее основе печатную плату и ее визуализацию. Но, как же неудобно читать такую схему, где все пинами, без соединений. На работе тоже уже достали такие схемы в буржуйских изделиях. Никого не призываю, но гораздо удобнее читать схему где видны все соединения. Есть же программы позволяющие рисовать как раньше. Давайте их пользовать, а?
Поворчал. Держу панамку.
Про пины да — уж простите, просто я ленивый. Так рисовать проще конечно. Ещё на схеме у меня есть другие нарушения ЕСКД — например обозначения элементов вперемежку, а не идут от угла к углу — я всё думал — придерётся кто-то или нет :) Схему просто начал с копипасты своего предыдущего датчика, а менять обозначения в EasyEDA ну просто максимально неудобно, в итоге забил на это.
Ясно почему Вы перешли на шаговый двигатель, точность позиционирования стрелки, микрошаги. Стрелка красиво движется, даже с ускорением)
Но совсем непонятно почему отказались от очень простой и рабочей идеи — обратной связи по углу поворота стрелки. (Как в сервомоторах. Оптические сложные. А просто резистор переменный вполне подойдёт)
Шаговый мотор часто пропускает шаги, бывает по разным причинам, запоминать их в спец. микросхеме нет смысла. Все равно периодически надо переводить стрелку в ноль. Для удаления накапливающийся погрешности
«Просто переменный резистор» это или шумы на выходе, или драгметаллы в конструкции и всё равно низкая надежность, как у чего угодно с подвижными контактами.
Резистор не подойдёт, у него слишком низкая точность. Если прям очень надо, то у моторов есть варианты со встроенными датчиками, но как написал — тестирование показало что смысла нет особо.
https://aliexpress.ru/item/1005005593922187.html
А так проблема надумана, там сенсор СО2 может уплывать сам без калибровки на 30%, пропуск пары шагов на этом фоне мелочи. Тем более там не будет пропуска шагов нет нагрузки.
Походу точно нет, ибо кто в курсе, знают насколько это источник кучи проблем.
Ну и если прям очень надо это решается датчиком холла и специальным магнитиком на вал.
Сама идея достаточно интересная. Желание повторить появляется, хотя вряд ли руки дойдут. Но в избранное отложу, конечно :)
— Автор, плохо, шкала нужна до 3500 минимум, переделывай!
— Автор, ну нафига шкала до 2200? Нужно только до 800, переделывай!
:)
Почему всегда, например открыты двери 800 ppm, закрыл чтобы кошки и собаки работать не мешали 2000 ppm. В офисах около 1000 ppm. Если летом комары одолевают прячешься от них под одеялом там под 50 000 ppm, тоже особо не проблема.
Дипсик так пояснил:
Так можно по уровню СО2 оценивать работу вентиляции. От СО2 проблем не будет, а вот от формальдегида могут быть, от пыли и кое-где от радона.
По-моему дипсик несёт дичь. Объём добавленного углекислого газа зависит от количества людей, а не от объёма комнаты. Соответственно, необходимый объём вытягиваемого воздуха — тоже. Больше объём комнаты — пропорционально медленнее полностью сменится воздух, но и концентрацию мы повышаем пропорционально медленнее. А то по его логике выходит, что в помещении объёмам 500 кубов мы вообще задохнёмся. Впрочем, даже он в итоге приехал примерно к тем же значениям — как мы понимаем, 38 и 30 — это уже в пределах разброса принятых исходных данных.
Что до «пока в помещениях никого не будет» — тут, опять же возвращаясь к нормам, мы либо говорим о воздухообмене по объёму помещения — для жилых это однократный обмен в час, либо по присутсвующим в нём людям — те самые 30 кубов на человека. Это две разные модели — либо тупо воздух гоним (для рекуператора это вполне приемлемо, особенно если приток через несколько помещений проходит) либо делаем датчики и гоним там, где люди есть.
А если оценивать — то, насколько я помню, вообще в идеале два параметра брали — для жилого это CO2 и VOC (и там интереснее не формальдегид, а то, что, хм, выделили люди). От того, что выделяют стены/мебель и прочего застоя воздуха норма — 0.1 объёма комнаты в час, независимо от наличия людей. Я, готовясь строить дом, в этой теме уже довольно давно копаюсь :-)
Кратность воздухообмена интуитивно понятна и полезно знать её саму по себе.
У меня дом построен в 2010 году, особой потребности в вентиляции нет. У меня 2 этажа, в нижних комнатах оставляю окна в режиме микропроветривания и хватает для циркуляции воздуха. Площадь дома 200 метров квадратных, на кухне небольшой настенный газовый котел с открытой камерой сгорания, он тоже воздух забирает в себя. Домашние по 6 комнатам располагаются, особого ужаса не отмечено с вентиляцией. Но можно и сделать. Или обычную канальную или бризеры через дырку в стене.
И увлажнители не использую, боюсь что по углам плесень пойдет. Если пройти тепловизором по угла видно что местами +5 градусов, это без приборов ни как не заметно. Есть например угол, в углу стоит диван или шкаф и воздух теплый не может проникать к холодной угловой стене и нагревать её. Если повысить дома влажность то там может отсыреть стена и пойти плесень.
Жаль что девайс вам не понравился на сто процентов :) Я хотел бы собрать экземпляр с указанными вами модификациями и отправить вам совершенно бесплатно — в знак уважения.
Потому что они вот реально бесшумные будут, все что описано в статье выполняют.
Ну и идея определения 0 — называется оно stall detection, достаточно крохотного шунта по питанию двигателя и с помощью adc можно легко определить 0 без каких либо излишиств и бесконечного долбления мотора.
* Низкая точность прибора из-за аналогового преобразования (напомню, что в обзоре написано что прибор задумывался как вообще универсальный, СО2 вставил только как необычный вариант измерения), а точность не хотелось ограничивать искусственно — если вы хотите отображать что-то более точное; В том что получилось на всю шкалу 3840 шагов (320*12), что-бы сделать так же — думаю нужен уже прецизионный вольтметр и DAC 16-битный (я тут может ошибаюсь, но шуметь думаю всё равно будет сильно);
* Стрелочные приборы довольно чувствительны к механике, у них очень тонкий и хрупкий механизм, кастомную стрелку получалось сделать очень сложно; Сама конструкция получается сложнее;
* Из предыдущего пункта: следовательно сделать «авиационный стиль» будет гораздо сложнее; Всё ещё можно сделать ретро вариант или другой, но я хотел именно как мой талисман на столе;
* Малый угол поворота — что-то такое низковольтное доступное с масс-маркета с углом поворота хотя бы в 300° я не смог найти; В принципе не критично, но сходство с талисманом теряется;
* Что-то ещё наверное всплыло на этапе R&D — я уже не помню;
З.ы. я на выходных сделаю статейку на Хабре — там будет больше таких технических подробностей, тут не хотелось обзор перегружать — в комментариях и так уже негодуют что TLDR.
Про 0 я написал, а насчет шкалы — там просто ограничители можно переделать и будет 300 градусов легко.
Опять-же куда такую точность в аналоге? Про погрешность помните-же она = цене деления, а плавность там автоматом получается так как физика. Единственный вопрос — стрелка, однако, думаю потянет, если сделать тонкой — но нужно помнить про ускорение и массу — ибо это реально физика и стрелку надо под конец пути тормозить, чтобы не дергалась — решается программно или кондером — своеобразный дебаунс.
В дополнение к последним коментариям, давненько друг строил мелкий самолет, нужен был тахометр к мотору, остановился на каком-то варианте от лады-жигулей, угол поворота стрелки ~300°, только перепаяли резистор который отвечал за настройку шкалы, на самолет установлен 2х цилиндровый мотор.
Задумался о чём-то типа такого: https://www.aliexpress.com/item/1005005902851084.html
P.S.
Да, и таких можнов панель собрать более компактно, чем будильники. Ну ведь нас же ещё температура интересует, влажность, загрузка ЦПУ и объём свободной RAM на домашнем сервере и… и что угодно ещё!
Не удивлюсь если увижу копию приборчика в продаже на Али. Готовая идея и практически готовая документация для запуска в производство.
А вот если сделать связь через ВиФи, например, с умной розеткой, тут открывается совсем другие перспективы. У меня нечто похожее, только с цифровой индикацией управляет канальным вентилятором. Устанавливаешь на смартфоне пределы срабатывания и устройство держит СО2 в заданных пределах.
А датчики влажности и температуры стоят в ванной например, это более важный параметр, если будет длительно высокая влажность пойдет плесень везде…
Теоретически можно добавить цифровой индикатор в промежутке циферблата.
Проект супер, однозначно достоен массового производства.
radiopench.blog96.fc2.com/blog-entry-1104.html
Только подумаешь, а уже реализовано )))))(это я про цифровой индикатор)
«икея распространена по всему свету» Россияне всплакнули :(
А что за донор использовался, есть где подробности почитать?
Вот такой вопрос: у меня в тасмоте счётчик импульсов, всё работает.
А можно ли в тасмоту добавить частотомер (0-2000 RPM) — хочу контролировать скорость кулера в компе?
С наскока такого не нашёл…
А всё проще. Тебе либо хорошо, либо нет. Если хорошо, то причины искать незачем. Но в 20 лет всем всегда хорошо, я точно помню!