Сверлильный станок ЧПУ для плат из палок и саморезов
- Цена: менее 1000 рублей
- Перейти в магазин
Не так давно мелькал тут обзор драйвера для шаговика, чувак изящно смастерил все без применения микроконтроллера. Почитал я это, глянул на свое сверлило для плат с тугой ручной подачей, и решил нацепить на него управление подачей вверх-вниз. Был куплен драйвер для шаговика, из закромов был вытащен подходящий шаговик от принтера, был куплен дорогущий кулачковый патрон, который я насадил на вал движка от какого то принтера, потом пришел драйвер и движуха началась.
Вот первая версия моего платосверлила:

люди с инженерным мышлением сразу заметят наркоманское положение рычага относительно направляющих (шиссот рублев за латунную трубку, и еще столько же за латунный стержень! да луше б я в китае купил линейние подшипники и две направляющих), из-за такого решения шпиндель ходит неравномерно, рывками, и можно переломать некоторое количество сверел, если они из твердосплава. А ради них все собственно и затевалось.
Пока ждал железо, замутил могучую подсветку для этого станка

прибор говорит что ОЧЕНЬ ЯРКО. Но работать комфортно, регулировку подсветки решил не делать
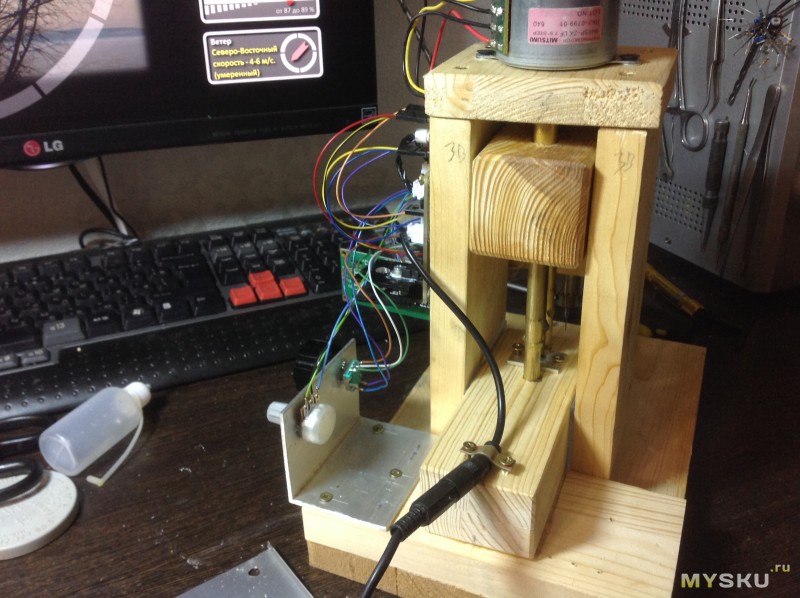
Начал пилить привод оси У. Решил просто добавить немного деревяшек к существующей конструкции

Настала очередь электроники.
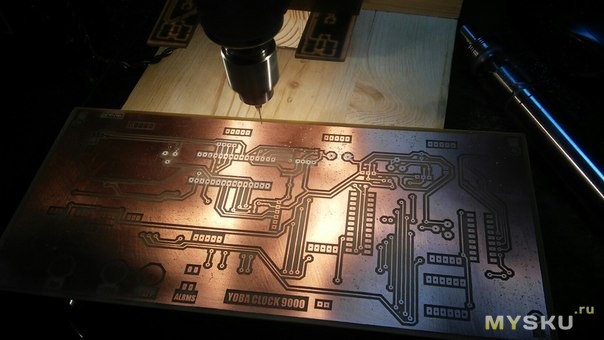
Поигрался в протеусе и на макетке со схемой и кодом, и вытравил плату для будущего контроллера

В качестве мозгов станка выступит ардуино нано, ибо кодить для чего-то более серьезного я не могу. Управление при помощи потенциометра и энкодера с кнопкой.
Сам драйвер называется в интернете EASY DRIVER, что как бы говорит о простоте работы с ним. Это верно. Ему нужно два сигнала — STEP и DIR. Первым мы шагаем движком, вторым говорим, в какую сторону шагать. После пробы топорной библиотеки для него я решил написать всё сам, получилось в итоге неплохо.
Питается это всё от ноутбучного блока питания на 19 вольт. Драйвер может пропустить через себя до 30 вольт, а мотор с патроном рассчитан на 24, если не ошибаюсь, оборотов у него все таки маловато.
Видео первого теста:
Энкодером можно двигать шпиндель вверх-вниз по оси У, переменный резистор задает расстояние, на которое шпиндель сдвинется за один щелчок энкодера, а так же задает скорость подачи при нажатии кнопки «СВЕРЛИТЬ!» Очень удобно оказалось использовать заранее подготовленный алгоритм проделывания отверстия. Так же для понта приделал валявшийся дисплей. Подключил его с помощью вот такого адаптера i2c? чтобы сэкономить ноги ардуины
Прикрутил все платы и ручки на места, и вот что получилось:

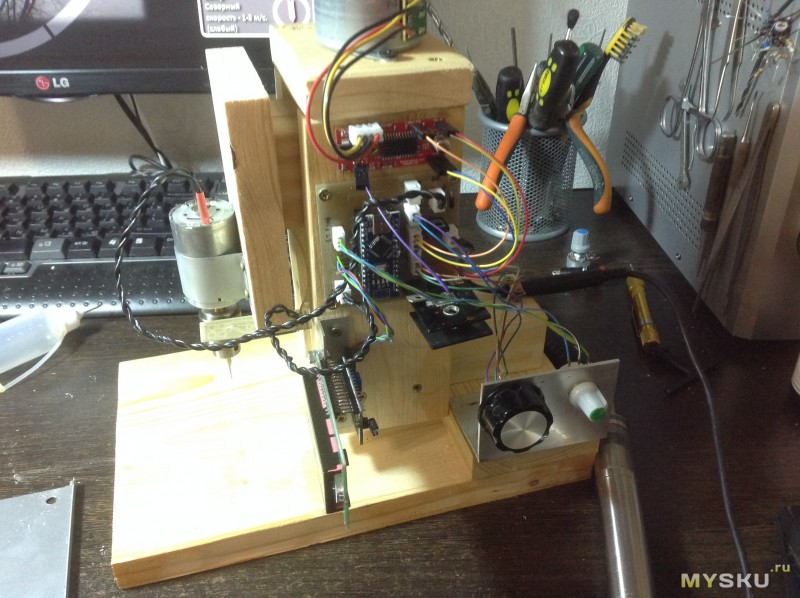

Помучившись с кодом заставил все это работать как мне нужно, и вот готовое устройство.
Теперь осталось надумать новый безумный проект, чтобы опробовать свое поделие в боевых условиях, а так же приделать педаль, чтобы освободить руки.
Если кого что заинтересовало в обзоре, спрашивайте, личка, комменты, как угодно
Вот первая версия моего платосверлила:
люди с инженерным мышлением сразу заметят наркоманское положение рычага относительно направляющих (шиссот рублев за латунную трубку, и еще столько же за латунный стержень! да луше б я в китае купил линейние подшипники и две направляющих), из-за такого решения шпиндель ходит неравномерно, рывками, и можно переломать некоторое количество сверел, если они из твердосплава. А ради них все собственно и затевалось.
Пока ждал железо, замутил могучую подсветку для этого станка
прибор говорит что ОЧЕНЬ ЯРКО. Но работать комфортно, регулировку подсветки решил не делать
вот фото в работе
Начал пилить привод оси У. Решил просто добавить немного деревяшек к существующей конструкции
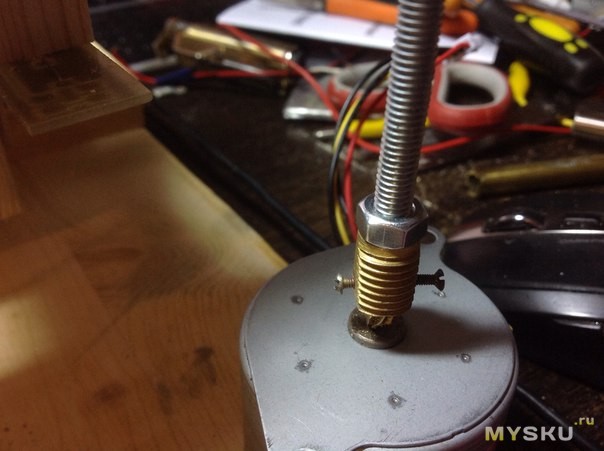
Обратите внимание на нанотехнологичное соединение вала с ходовым винтом
Для этого был куплен датчик стопсигнала от ваза какого то, и безжалостно раздолбан, чтобы осталась только латунная трубка
Настала очередь электроники.
Поигрался в протеусе и на макетке со схемой и кодом, и вытравил плату для будущего контроллера
В качестве мозгов станка выступит ардуино нано, ибо кодить для чего-то более серьезного я не могу. Управление при помощи потенциометра и энкодера с кнопкой.
Сам драйвер называется в интернете EASY DRIVER, что как бы говорит о простоте работы с ним. Это верно. Ему нужно два сигнала — STEP и DIR. Первым мы шагаем движком, вторым говорим, в какую сторону шагать. После пробы топорной библиотеки для него я решил написать всё сам, получилось в итоге неплохо.
Питается это всё от ноутбучного блока питания на 19 вольт. Драйвер может пропустить через себя до 30 вольт, а мотор с патроном рассчитан на 24, если не ошибаюсь, оборотов у него все таки маловато.
Видео первого теста:
Энкодером можно двигать шпиндель вверх-вниз по оси У, переменный резистор задает расстояние, на которое шпиндель сдвинется за один щелчок энкодера, а так же задает скорость подачи при нажатии кнопки «СВЕРЛИТЬ!» Очень удобно оказалось использовать заранее подготовленный алгоритм проделывания отверстия. Так же для понта приделал валявшийся дисплей. Подключил его с помощью вот такого адаптера i2c? чтобы сэкономить ноги ардуины
Прикрутил все платы и ручки на места, и вот что получилось:
посмотреть
Помучившись с кодом заставил все это работать как мне нужно, и вот готовое устройство.
Теперь осталось надумать новый безумный проект, чтобы опробовать свое поделие в боевых условиях, а так же приделать педаль, чтобы освободить руки.
Если кого что заинтересовало в обзоре, спрашивайте, личка, комменты, как угодно
Самые обсуждаемые обзоры
| +53 |
2203
102
|
| +38 |
2143
43
|
| +65 |
2990
74
|
ДА еще «шиссот рублев за латунную трубку, и еще столько же за латунный стержень!»…
При том, что старый советский УПА можно найти на помойке бесплатно (а часто он прямо в кладовке валяется без дела)…
В целом очень круто
Как там /vape/?Понравились протравленные платы. Как я понимаю, они сделаны с использованием фоторезиста?
А в вэйпаче одни гики. Не нравится
Это сверлильный станок с электронным управлением.
Чтобы был вот такой результат:
или вот в таком виде:
2) не верится что твердосплав такой «станочек» переживет. По крайней мере 0,5мм и меньше.
Еще если сверло тупое, а другого нет, то при спешном сверлении оно может немного приподнять металлизацию и тогда тонер плохо ляжет в этом месте.
Правда, в таком варианте увеличивается шанс оторвать пятак.
Станочек у меня тоже есть. Ушел от него.
Если в eagle, то это скрипт «drill-aid.ulp» в отдельном слое создает для этого заливку отверстий.
Если следовать Вашей идеологии — программирование контроллеров на С — то же зло. Только машинные коды, только хардкор. Зато напрямую с железом. Не важно что при этом с контроллерами будут работать единицы. Зато это будут настоящие зубры. А всем остальным нечего тянутся своими не хардкорными ручками к великому таинству программирования контроллеров))).
P.S. Извините за резкость, просто я автор программы FLProg, и естественно защищаю своё детище.
Абсолютно ничего личного, я совершенно не знаком с Вашим детищем, с уважением отношусь к чужому труду, но если его невозможно «вкусить» по причине кривости реализации — глупо ожидать иной реакции от публики. Нечего на зеркало пенять. Надеюсь, что Вы найдете в моей критике некоторый конструктив.
Во первых я не вэб программист, поэтому сайт собран в конструкторе сайтов. К слову сказать мобильная версия сайта работает и проблемы с отображением происходят только в браузере Mozila, в остальных мобильная версия сайта работает отлично.
Во вторых я считаю что основная моя задача — делать то что я умею лучше, то есть развивать программу. Сайт всё таки вторично.
В третьих проект изначально разрабатывался как некоммерческий, и не планируется таковым становится. Поэтому заказывать разработку сайта профессиональным вэб прогрессистам я не имею финансовой возможности.
Я считаю что тот кого проект заинтересует найдёт время зайти на сайт с обычного компьютера, если захочет.
опять таки задействована одна из конечностей. те смысла в шаговике особого нет. вот еслиб нажал убежал и все отверстия автоматом. тогда да.