Коммутатор каналов для настройки магнитофонов

Большинство магнитофонов, которые приходится настраивать или ремонтировать, являются стереофоническими. Т.е. они имеют два независимых канала. При настройке важно сделать эти каналы одинаковыми. Все время переключать измерительные приборы (осциллограф, милливольтметр, частотомер) с канала на канал путем перетыкивания кабелей не совсем удобно. Можно, конечно, иметь двойной комплект измерительных приборов, но не совсем удобно будет сравнивать их показания, и они будут занимать слишком много места. Гораздо практичней использовать коммутатор.
Идею такого коммутатора я почерпнул у знаменитого мастера Георгия Верёвкина (его канал на YouTube). К великому сожалению, мастер в 2022 году умер :( Про свой коммутатор Георгий рассказывает в этом видео. В свое время он работал в радиомастерской, т.е. был профессиональным ремонтником. Коммутатор пришел именно из той среды. Им пользовались люди, которые каждый день занимались ремонтом магнитофонов. Они на собственном опыте знали, что коммутатор намного удобнее двухлучевого осциллографа. Переключая поочередно каналы, очень хорошо видны все различия.
Что-то подобное я тоже решил сделать, устав от постоянного перетыкания кабелей. Еще одна функция коммутатора – он выполняет роль переходника с разъемов, принятых в аудио (RCA или DIN) на разъемы, принятые в измерительной аппаратуре (BNC). Чаще всего в импортных магнитофонах используются разъемы RCA, такие разъемы в случае доработки я ставлю во все аппараты.
Режекторный фильтр на частоту подмагничивания я решил в коммутатор не встраивать, потому что это совсем другая задача. К тому же, в хороших магнитофонах на выходе нет заметной помехи с частотой подмагничивания.
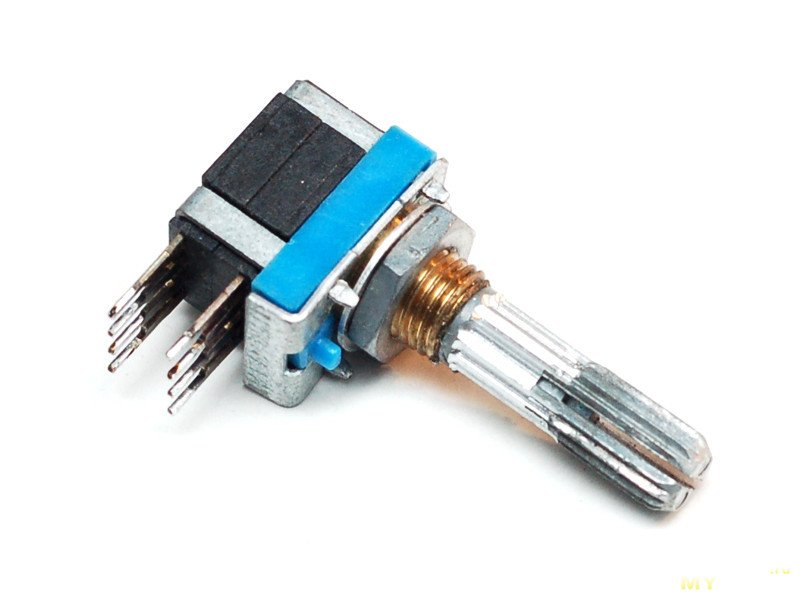
Первоначально я хотел применить переключатель на 4 положения: GND, L, R, L+R. Но не смог найти подходящего. Зато в хозяйстве нашел качественный переключатель ALPS на 3 положения.

Положение GND, когда вход измерительной аппаратуры заземляется, нужен в основном для установки нулевой линии осциллографа, что требуется не так часто. Решил для этой функции предусмотреть отдельную кнопку сбоку корпуса.
Найденный переключатель имел очень длинный вал, который предстояло укоротить. Для этого пришлось нарезать шлицы по всей длине вала. В качестве фрезы использовал центровочное сверло.
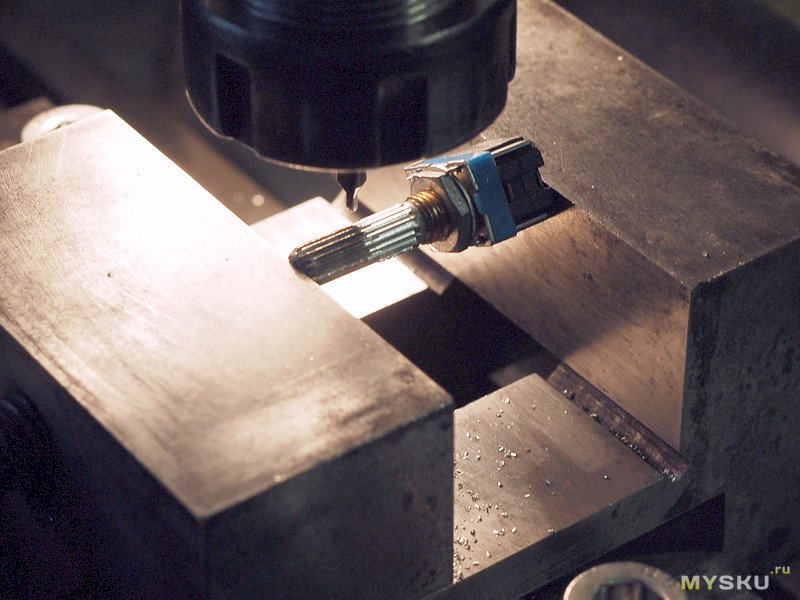
Получилось не идеально, но вполне приемлемо.
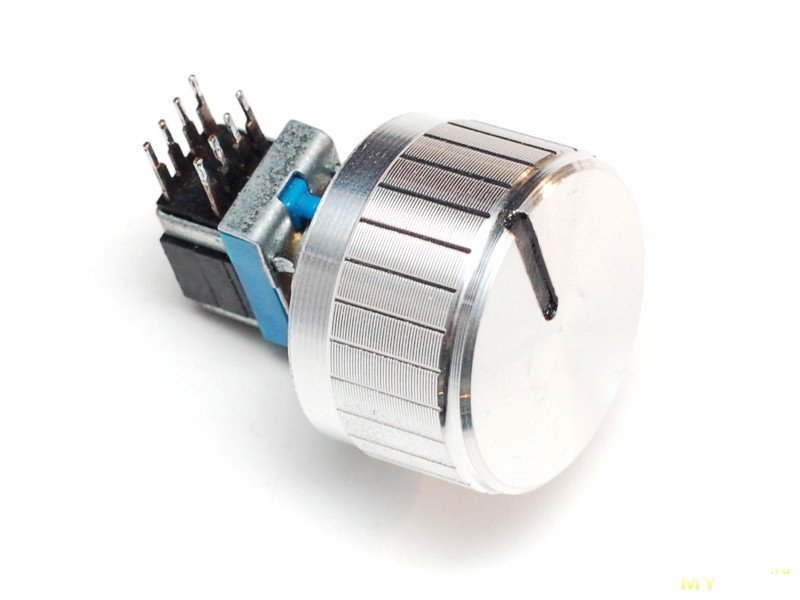
Ручку для переключателя купил в магазине Белчип, вот ссылка: Ручка RUICHI 30x17BL.

В ручке профрезеровал более заметный паз указателя положения. Заполнил его черной краской, но потом смыл и матировал поверхность. Наверное, лучше будет в будущем вклеить туда полоску красного пластика. На самодельные шлицы ручка налезла вполне нормально.
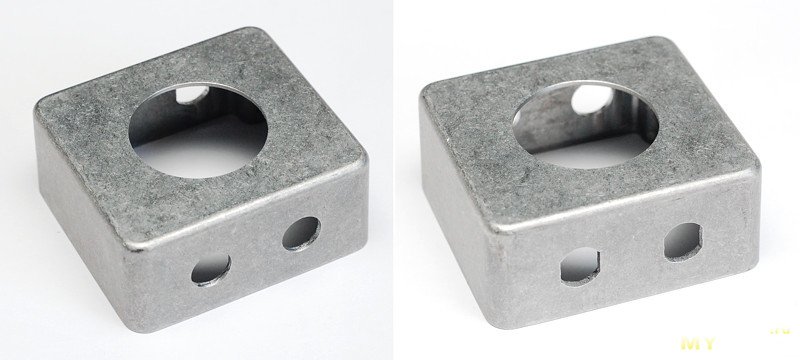
Корпус для коммутатора выбрал алюминиевый (для лучшей экранировки) GAINTA B035 / 60x55x30.

В корпусе надо проделать большое отверстие для ручки. Если бы был поворотный столик, его можно было бы вырезать любой фрезой. Но столика пока нет (очень дорогой), поэтому использовал резец в расточной головке.

Маленькие отверстия проделать проще. С одной стороны – просто круглые для RCA, с другой стороны – сложной формы для BNC, которые сначала фрезеровал, потом доработал надфилем.
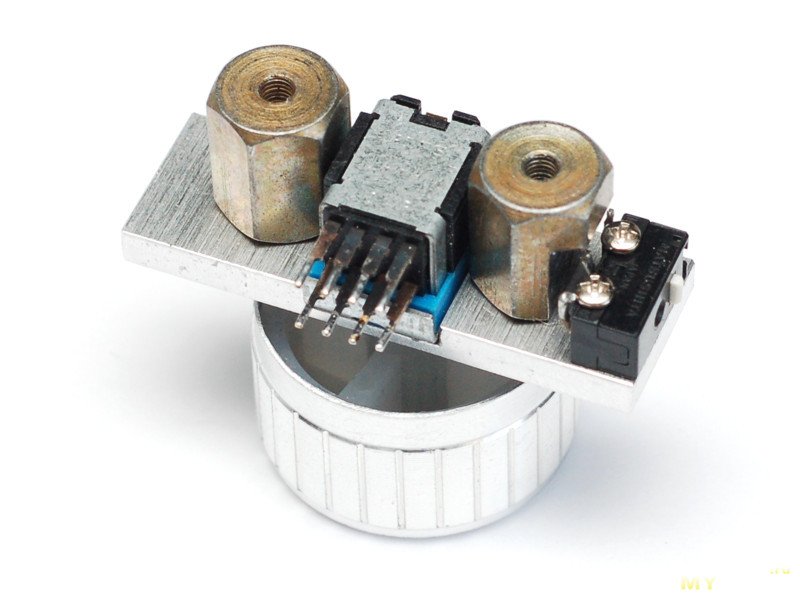
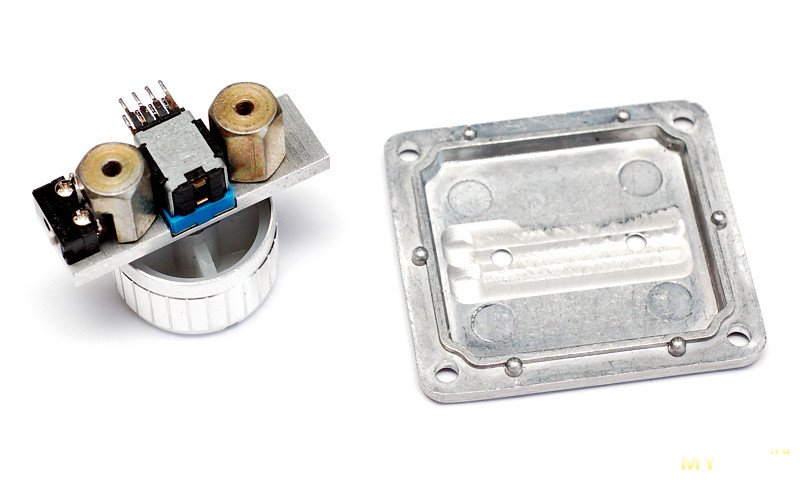
Чтобы на корпусе не было видимых винтов, все внутренности решил закрепить на стойках на нижней крышке. Поверхность крышки пришлось немного подровнять. Переключатель и кнопку закрепил на алюминиевой пластине.
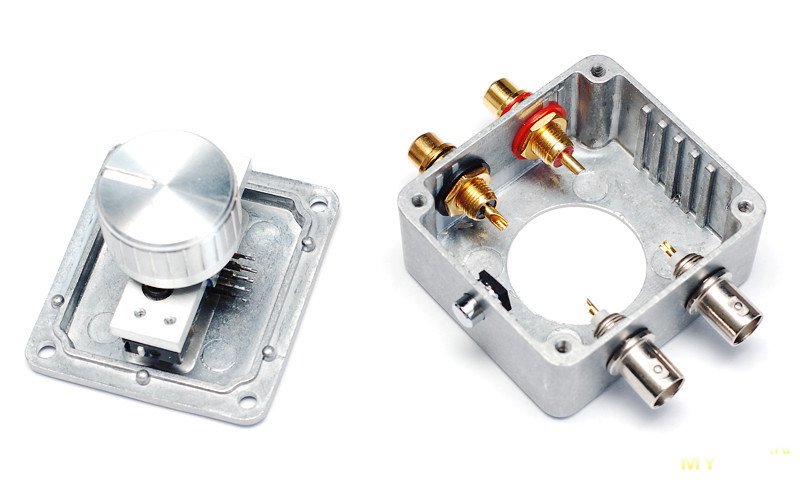
Пробная сборка не выявила проблем.

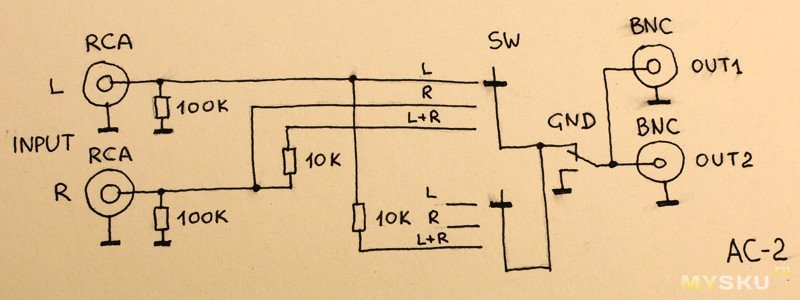
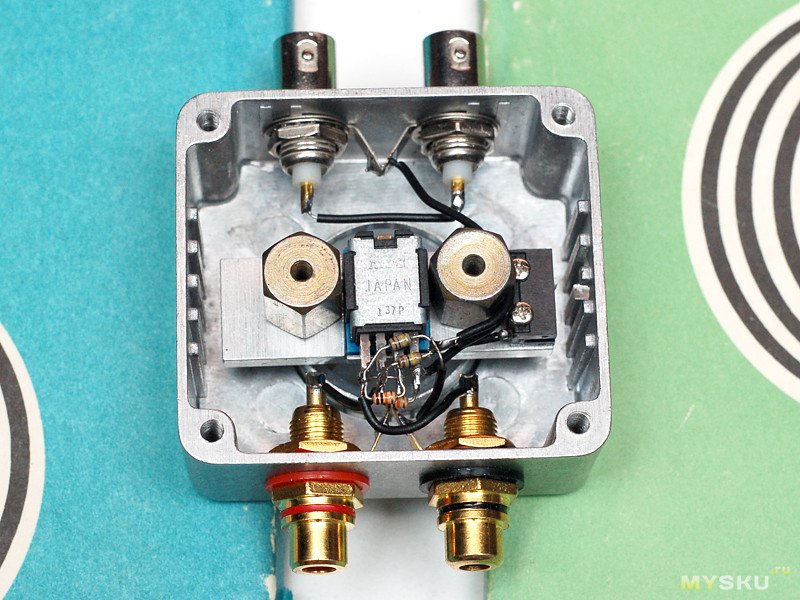
Теперь надо выполнить внутренний монтаж. Схема незатейливая:
Монтаж сделал навесной, но он получился не очень красивый, что порядком расстроило. Каким-то чудом заставил себя не переделывать, а просто закрыть крышку.
И тут я снова столкнулся с проблемой радиолюбительства всех времен и народов – как сделать надписи? Возможно, на алюминиевом корпусе можно сделать лазерную гравировку. Буквы были бы вряд ли сильно контрастными, но должны быть вполне заметными. Но куда с этим податься? И что получится? Могут случиться просто деньги на ветер. Поэтому решил пойти проверенным путем – наклейкой из пленки Oracal. Конечно, наклейка здесь не очень уместна, ее края ничем не защищены. Фрезеровать углубление я не решился, стенка корпуса тонкая, а сам корпус довольно кривой. Но при аккуратном обращении даже наклеенная просто на поверхность наклейка должна протянуть какое-то время.
Пленку выбрал серебристую, цвет получился почти неотличимым от корпуса. Сверху этикетка ламинирована. Контур и отверстие — плоттерная резка. Вот так выглядит готовая конструкция:

Ну и небольшой пример использования. Для проверки АЧХ магнитофона использую записанный на ленту свип-тон. Для примера – свип-тон от 200 Гц до 20 кГц.
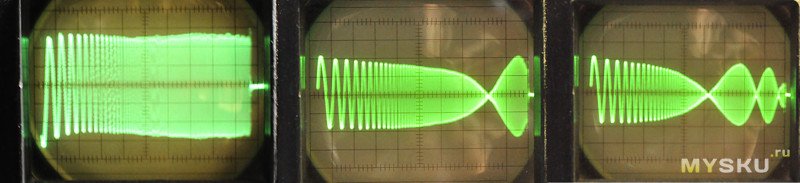
На первом скриншоте осциллографа видим вполне ровную АЧХ до 20 кГц. На втором скриншоте демонстрация нарушенного азимута головки воспроизведения в режиме L+R. Хорошо видны провалы на тех частотах, где взаимный фазовый сдвиг у каналов становится 180 градусов. При суммировании L+R сигналы взаимно компенсируются. Третий скриншот – то же самое, но азимут нарушен еще сильнее. По осциллограмме даже можно вычислить, какой именно угол погрешности азимута.
Коммутатором очень доволен, он значительно облегчает работу. В конце каждого проекта интересно проанализировать, что бы сделал по-другому.
Самое очевидное, применил бы переключатель на 4 положения и убрал бы кнопку, которая рушит простоту конструкции. Такой переключатель можно купить на Aliexpress, но тогда просто не хотелось ждать.
Внутри применил бы печатную плату. Схема хоть и простая, но навесной монтаж выглядит совершенно неэстетично.
Ну и способ нанесения надписей здесь не совсем подходящий. Но это неразрешимая на данном этапе развития общества проблема, поэтому сделал бы так же.
Делая какое-то устройство, можно всегда задавать себе вопрос – а как бы оно выглядело, если бы было фирменным? Скорее всего, поверхность корпуса была бы вида «шлифованный алюминий», на которую краской были бы нанесены надписи. Если бы использовалась этикетка, то под нее обязательно было бы углубление.
В остальном – даже не знаю, все вполне устраивает.
Идею такого коммутатора я почерпнул у знаменитого мастера Георгия Верёвкина (его канал на YouTube). К великому сожалению, мастер в 2022 году умер :( Про свой коммутатор Георгий рассказывает в этом видео. В свое время он работал в радиомастерской, т.е. был профессиональным ремонтником. Коммутатор пришел именно из той среды. Им пользовались люди, которые каждый день занимались ремонтом магнитофонов. Они на собственном опыте знали, что коммутатор намного удобнее двухлучевого осциллографа. Переключая поочередно каналы, очень хорошо видны все различия.
Что-то подобное я тоже решил сделать, устав от постоянного перетыкания кабелей. Еще одна функция коммутатора – он выполняет роль переходника с разъемов, принятых в аудио (RCA или DIN) на разъемы, принятые в измерительной аппаратуре (BNC). Чаще всего в импортных магнитофонах используются разъемы RCA, такие разъемы в случае доработки я ставлю во все аппараты.
Режекторный фильтр на частоту подмагничивания я решил в коммутатор не встраивать, потому что это совсем другая задача. К тому же, в хороших магнитофонах на выходе нет заметной помехи с частотой подмагничивания.
Первоначально я хотел применить переключатель на 4 положения: GND, L, R, L+R. Но не смог найти подходящего. Зато в хозяйстве нашел качественный переключатель ALPS на 3 положения.
Положение GND, когда вход измерительной аппаратуры заземляется, нужен в основном для установки нулевой линии осциллографа, что требуется не так часто. Решил для этой функции предусмотреть отдельную кнопку сбоку корпуса.
Найденный переключатель имел очень длинный вал, который предстояло укоротить. Для этого пришлось нарезать шлицы по всей длине вала. В качестве фрезы использовал центровочное сверло.
Получилось не идеально, но вполне приемлемо.
Ручку для переключателя купил в магазине Белчип, вот ссылка: Ручка RUICHI 30x17BL.
В ручке профрезеровал более заметный паз указателя положения. Заполнил его черной краской, но потом смыл и матировал поверхность. Наверное, лучше будет в будущем вклеить туда полоску красного пластика. На самодельные шлицы ручка налезла вполне нормально.
Корпус для коммутатора выбрал алюминиевый (для лучшей экранировки) GAINTA B035 / 60x55x30.
В корпусе надо проделать большое отверстие для ручки. Если бы был поворотный столик, его можно было бы вырезать любой фрезой. Но столика пока нет (очень дорогой), поэтому использовал резец в расточной головке.
Маленькие отверстия проделать проще. С одной стороны – просто круглые для RCA, с другой стороны – сложной формы для BNC, которые сначала фрезеровал, потом доработал надфилем.
Чтобы на корпусе не было видимых винтов, все внутренности решил закрепить на стойках на нижней крышке. Поверхность крышки пришлось немного подровнять. Переключатель и кнопку закрепил на алюминиевой пластине.
Пробная сборка не выявила проблем.
Теперь надо выполнить внутренний монтаж. Схема незатейливая:
Монтаж сделал навесной, но он получился не очень красивый, что порядком расстроило. Каким-то чудом заставил себя не переделывать, а просто закрыть крышку.
И тут я снова столкнулся с проблемой радиолюбительства всех времен и народов – как сделать надписи? Возможно, на алюминиевом корпусе можно сделать лазерную гравировку. Буквы были бы вряд ли сильно контрастными, но должны быть вполне заметными. Но куда с этим податься? И что получится? Могут случиться просто деньги на ветер. Поэтому решил пойти проверенным путем – наклейкой из пленки Oracal. Конечно, наклейка здесь не очень уместна, ее края ничем не защищены. Фрезеровать углубление я не решился, стенка корпуса тонкая, а сам корпус довольно кривой. Но при аккуратном обращении даже наклеенная просто на поверхность наклейка должна протянуть какое-то время.
Пленку выбрал серебристую, цвет получился почти неотличимым от корпуса. Сверху этикетка ламинирована. Контур и отверстие — плоттерная резка. Вот так выглядит готовая конструкция:
Ну и небольшой пример использования. Для проверки АЧХ магнитофона использую записанный на ленту свип-тон. Для примера – свип-тон от 200 Гц до 20 кГц.
На первом скриншоте осциллографа видим вполне ровную АЧХ до 20 кГц. На втором скриншоте демонстрация нарушенного азимута головки воспроизведения в режиме L+R. Хорошо видны провалы на тех частотах, где взаимный фазовый сдвиг у каналов становится 180 градусов. При суммировании L+R сигналы взаимно компенсируются. Третий скриншот – то же самое, но азимут нарушен еще сильнее. По осциллограмме даже можно вычислить, какой именно угол погрешности азимута.
Коммутатором очень доволен, он значительно облегчает работу. В конце каждого проекта интересно проанализировать, что бы сделал по-другому.
Самое очевидное, применил бы переключатель на 4 положения и убрал бы кнопку, которая рушит простоту конструкции. Такой переключатель можно купить на Aliexpress, но тогда просто не хотелось ждать.
Внутри применил бы печатную плату. Схема хоть и простая, но навесной монтаж выглядит совершенно неэстетично.
Ну и способ нанесения надписей здесь не совсем подходящий. Но это неразрешимая на данном этапе развития общества проблема, поэтому сделал бы так же.
Делая какое-то устройство, можно всегда задавать себе вопрос – а как бы оно выглядело, если бы было фирменным? Скорее всего, поверхность корпуса была бы вида «шлифованный алюминий», на которую краской были бы нанесены надписи. Если бы использовалась этикетка, то под нее обязательно было бы углубление.
В остальном – даже не знаю, все вполне устраивает.
Самые обсуждаемые обзоры
| +33 |
1912
57
|
Все мы когда-то не видели их… до поры… Я вот — лет до 15-ти, кажется… :))
А в 18 у меня уже было свой собственный С1-5, заработанный честным трудом. :)
У автора топика спросили я бы спросил, а что за осциллограф у вас?..
Его ответ , буквально по существу.
Имхо меня интересовал ответ на вопрос который я не задал (про осциллограф) поэтому и спросил автора про скриншот. Автор опять ответил только буквально по существу и не указал марку осциллографа.
Но удивительно, что столько заморочек для вещицы для ускорения ремонта доисторической техники.
Магнитофон выкинул еще лет 10 назад, до этого он еще лет 10 просто занимал место в квартире) Хотя если под магнитофоном понимать муз. центр, в который впихнуть bluetooth, ну или любителям послушать FM — то да, еще хоть какое-то применение.
Недавно ремонтировал эффект для гитары, сказали что купили его за 400евро, после ремонта не верили что я не поменял плату, я восстановил все дорожки и пятаки ремкомплектом китайским, потом положил черную маску как в оригинальном.
Знакомые музыканты иногда приносят такие вещи, скупают за дорого по всяким ебеям.
Кондёры пересохли или потенциометры загадились?
Педали же вечные, до сих пор две штуки «Лель» валяются, которым уже 25 лет, и ничего с ними не делается (кроме крутилок, «хрустеть» начали).
Попались вдруг аппараты, собранные вами когда-то собственноручно, на производстве? ;)
И не забываем, что сейчас этой «краской» мажут, зачастую, те, кто тогда своими руками и делал то, что сейчас критикуется. Я таких вокруг себя все эти годы вижу… :)
У них набившее уже оскомину за десятки лет «Разграбили страну!» а я помню, кто из них и что в те самые годы «разграбления» сам «скоммуниздил»… :))
У меня почему-то всё «ремонтировалось» один раз, а потом всё больше работало… ;)
«Так, может, в консерватории что заменить?.. © ;) :))
Просто любопытно, а почему вырезали отверстие для всей крутилки, а не только для вала переключателя? Так же пыли будет проще внутрь попадать
Остальное — красивое…
Ни разу не испытывал потребности в таком коммутаторе. Просто нажимаешь на магнитофоне кнопку 1 канал.
На приборах будет именно первый. Нажимаешь 2 — будет второй.
Хотя нет, вру. На кабеле от магнитофона висела кнопка П2К, для быстрой коммутации каналов.
Иногда лень тянуться к передней панели.
Свип генераторы не использовали. Были тестовые ленты ЧВН. Т.Е. Частота высота наклон.
По осцилограмме можно можно было судить о наклоне магнитной головке, её высоте, а так-же о линейности
всего тракта воспроизведения по АЧХ.
Например
Показывает, как магнитофоны ремонтирует. На его фоне актуальность этой статьи весьма сомнительна.
Начинали мы с другого, с фразы:
И это абсолютно не так. Да, речь идет о современных цифровых осциллографах с «цифровым фосфором» (или аналогичным технологиям), т.к. они не проигрывают аналоговым в той самой вероятности нахождения «луча» в точке.
Прежде всего, цифровой удобней в любых задачах. Например, АЧХ магнитофона — как вы получили фото выше? Всё включили, ждали нужного момента и нажали кнопку спуска на фотоаппарате? А если промахнулись, то повторять процесс снова? Ну, очевидно же, что на цифровом это будет удобней.
Также цифровой умеет производить кучу измерений. Не с огромной точностью, но не хуже стрелочного вольтметра. Например, вам нужно узнать максимальную неискаженную амплитуду сигнала на выходе усилителя. На аналоговом вам придется сначала высчитать амплитуду пика по клеточкам, затем поделить на корень из двух. Цифровой просто покажет число. Да, задача решается и там, и там, но очевидно же, что на цифровом удобней.
А теперь гармонические искажения. Упс, а на аналоговом-то их посмотреть просто невозможно… А на цифровом — подаем сигнал, включаем БПФ и наглядно всё видим.
P.S. Вы же фотографируете цифровым фотоаппаратом?
А вот я никогда не пользовался аппаратами такого уровня. Возможно, интерфейс там действительно несколько переусложненный, но если и так, то это только от их огромной функциональности. Ну и полоса 6 ГГц — это что-то невероятное. Конечно, радиолюбителю в такие частоты лезть особого смысла нет, но само их наличие вызывает уважение.
То есть, свип начинается примерно с 200 Гц? А как же частоты ниже?
В цифровых есть свои особенности, зависящие от производителя и его «видения». Например, мой предыдущий ригол 1052Е оцифровывал порядка 4-х экранов. То есть, можно было остановить оцифровку, сделать zoom out и увидеть более широкую картину — что было до и что было после основного временного интервала. А вот текущий сиглент — наоборот. Он в этом плане ровно как аналоговый, если поставить на паузу, можно только увеличивать (zoom in). И, знаете, я за 15 лет владения риголом так привык к тому, что могу «осмотреться вокруг», что мне до сих пор этого не хватает на сигленте. Хотя вы наверняка бы выбрали модель отображения сиглента, как более близкую к аналогу. В остальном же, у цифровых как раз по синхронизации намного больше возможностей, чем у аналоговых, там можно очень интересные вещи ловить.
В случае вашего сигнала, кстати, цифровому синхронизация вообще не нужна) Можно просто установить 10 мс/дел, увидеть «что-то», нажать на паузу, а потом рассмотреть всё детально. При текущих объемах памяти (десятки миллионов точек) проблем увеличить ВЧ-порцию не возникнет.
Очень сильно ошибаетесь. Это раньше не проводили, потому что точность у осциллографов была ниже плинтуса. Хотя, даже в описании вашего «Сага» можно найти такое:
А сейчас в мэйнстрим входит 12 бит. Как думаете, зачем это, если не для измерений?
Если вам надо отличить 0.1% THD от 0.01%, осциллограф вряд ли подойдет. Но разве это можно услышать? Это лишь развлечение для аудиофилов. А, вообще, БПФ творит чудеса и даже на 8-битном осциллографе можно увидеть то, что, казалось бы, не в состоянии оцифровать его АЦП. Специально проверил, т.к. стало интересно:
Да, идею понял. Ну, 20 fps — не так много, думаю, это вполне возможно. Надо будет как-нибудь проверить.
Конечно, если осциллограф выключен и надо только изменить уровень, проще использовать вольтметр. Но у обычных мультиметров достаточно серьезные ограничения по частоте при измерении переменки, те же 20 КГц под силу не всем. Да и доверия к осциллографу больше, т.к. на экране сразу виден сигнал и понятно, что именно измеряется. А мультиметром я однажды намерил что-то не то, не помню уже по какой именно причине. Кстати, точность на переменке у того же UT61E вполне сопоставима с осциллографом.
Ну, во-первых, практически в любом осциллографе два варианта измерения частоты — по периоду экранного сигнала и через счетчик. Более точный вариант — через счетчик, но и с ним бывают проблемы, если сигнал сложной формы. Обычно он считает по уровню срабатывания триггера, поэтому надо правильно выбирать последний. Но, по сути, в любом частотометре так — попадет помеха на порог срабатывания, будет показывать ерунду.
А, во-вторых, в осциллографе можно еще на «хитрость» пойти — включить БПФ и посмотреть частоту там. Да, есть свои ограничения, но можно измерить такой сигнал, который никакому частотомеру не под силу. Например, мой осциллограф с воткнутым, но никуда не подключенным щупом на БПФ отлично показывает станции ФМ-диапазона. Прямо как SDR.
Вот это верно, я в юности делал самодельный частотомер на 155-й серии, ставил на вход счетчик из 531-й, чтобы частоту повысить — оказался настолько нужный прибор, что я даже не знаю сейчас, где он. А было бы интересно замерить, сколько у него предел (тогда не было у меня таких генераторов). Но, опять же, у меня это еще и благодаря осциллографу — как только он появился (даже аналоговый), я всегда мерил частоту им.
Ого. Так это ж пол цифрового осциллографа по стоимости :) Я для себя нашел оптимальный вариант среди мультиметров — Uni-T UT61E или Owon 41.
У меня такой: www.leoniv.diod.club/projects/measuring/fc-510/fc-510.html
Да, было время, мог позволить. Тогда и объективы для фотика покупал за 1000$. Но с приближением старости всё труднее зарабатывать, да и вокруг обстановка не способствует.
Читал хорошие отзывы про этот мультиметр. Но подумал, что 71 будет не хуже. Что не устраивает. Медленное обновление показаний — хоть ненамного, но все равно предпочтительней DT890. Лишние цифры на дисплее только мешают. Точные измерения нужны ну крайне редко. Есть быстрый и менее точный режим, но при каждом включении надо зажимать кнопку, это невозможно помнить. На переменке время установления показаний — ужас ужасный. Вообще неюзабельно. RMS есть, но за мою жизнь это ни разу не было надо. Ну и самое главное — негодный режим прозвонки, с задержкой. В режиме прозвонки у меня тестер находится 99% времени. У DT890 с этим все нормально. Хотел одно время купить настольный тестер без крутилки, с кнопками. На работе есть UT805A, прибор хороший, но слишком дорогой. И дисплей у него плохой. Думал взять VC8145, но тоже дороговато, громоздкий, и нет уверенности, что понравится. Пощупать ведь негде. А может и не надо дергаться, хватает того, что есть. Все равно с приобретением нового прибора чуда не случится.
Да, видел. Очень детально проработана теория измерения частоты, прямо бесконечное стремление к повышению точности. Только точные измерения нужны, ну, крайне редко, а с низкой частотой — и подавно, Что вы им измеряли на практике?
Мой частотомер был сделан примерно на 20 лет раньше вашего, в 94-м или 95-м году. Тогда AVR еще даже «у них» не было, и если нужно было программное управление, ставили Z-80 с соответствующей обвязкой. Но это было достаточно дорого для радиолюбителя по тем временам. Поэтому никакими технологическими решениями он похвастаться не мог. Да и не было смысла — применял я его всего пару раз, один из самых бесполезных приборов оказался.
Вам надо в какую-нибудь компанию типа того же тектроникса, где делают приборы далеко не бытового уровня. Там и зарплата будет адекватная, и интересы соблюдены.
Слышал (и видел) про такие проблемы в дешевых мультиметрах, не думал, что в более дорогих это тоже актуально. В UT61E достаточно неплохо, лишь совсем немного хуже (как мне кажется), чем в аналоговых. В общем, работа с 61-м дискомфорта не доставляет, его единственный (по мне) минус — отсутствие измерения температуры. Тут owon выигрывает.
Я с такими же мыслями обновил осциллограф с ригола на сиглент и не обновил мультиметр до DMM6500. Ни о том, ни о другом не сожалею.
Чего нет, того нет.
Ничего особенного не измерял. Допустим, использую для калибровки внутренних RC-генераторов микроконтроллеров, но точность для этого не нужна. Точность делалась чисто из любви к искусству. Да и опорный генератор там всё портит. Планировал сделать к нему опорник с синхронизацией от GPS, но за ненадобностью проект завис.
Если только полы там мыть. На что еще сгодится радиолюбитель предпенсионного возраста?
Для прозвонки должно быть не «неплохо», а идеально, иначе теряется смысл. Задержки не должно быть вообще. Если, допустим, щупы плохо контачат, это должно обозначаться хрипением звука. Если быстро ведём щупом по ряду выводов, то должны услышать даже кратчайший «бип». В принципе, можно сделать отдельную прозвонку, у меня даже такая есть, но не пользуюсь, ибо еще одна коробочка со щупами сильно добавляет захламленности.
И что получили, кроме красивой коробочки? Неужели проекты стали делаться лучше?
Наверное, в цифровых такого нигде нет. Не потому, что невозможно, а потому, что не делают так.
Проекты? Ахаха, нет у меня никаких проектов. Не понимаю, что в текущее время я мог бы хорошего сделать дома — или проще купить готовое, или идея слишком сложна для домашней реализации.
Хотя нет, в одном деле он мне помог. Последним моим проектом был самодельный линейный БП на 5 каналов лет 7 назад. В нем два канала ±35 В 3 А, то есть, на достаточно серьезное напряжение. Я тогда как раз на ваш блог в интернете наткнулся и читал про ваш, кажется, 3604. Меня у вас заинтересовала идея переключения входных обмоток. Но сделал иначе — если прерывать заряд входного конденсатора по достижению на нем определенного напряжения, можно еще больше снизить потери на стабилизаторе и обойтись всего одной обмоткой. При этом, помехи от такого прерывания заряда на выходе БП у меня получились порядка 2 мВ (по риголу). Меня это полностью тогда устроило. А потом, когда приобрел сиглент, намерил им значительно большую помеху — то ли 20, то ли 50 мВ (уже не помню). Почему ригол её не смог отловить — ума не приложу. В общем, наверное, если бы у меня был изначально сиглент, я бы приложил больше усилий для подавления помехи и сделал бы БП лучше. Ну, а теперь, когда это всё уже давно собрано в корпусе, переделывать смысла нет. Делать еще один БП — не хочу, т.к., по сути, меня и этот полностью устраивает. Да и даже импульсный бы устроил — как оказалось, я не занимаюсь устройствами, которым нужно сверхчистое питание.
И еще выяснилась одна особенность — имеющийся тороидальный трансформатор в закрытом корпусе при длительной работе на нагрузку в виде выпрямителя начинает перегреваться. То есть, надо было вентилятор не только на радиатор ставить, но и на трансформатор. Короче, решение не до конца рабочим получилось.
А зачем тогда купили осциллограф? :)
В эпоху изобилия настал кризис проектов для радиолюбительства. Поэтому делают всякую ненужную хрень, что можно видеть и на этом сайте. Я для себя решил вопрос тем, что вернулся к аудиотехнике. С нее когда-то начинал, но тогда это делалось от бедности, готовое было недоступно. Сейчас наблюдается рост интереса к аналоговому аудио, а это идеальный предмет для любительства. Аналоговое аудио примитивно, проект не будет слишком сложным. В то же время он не является бесполезным, самодельную аппаратуру я реально слушаю.
Да, есть такие БП — с пререгулятором. Иногда его делают импульсным на высокой частоте, но тогда есть проблема помех. А иногда делают на сетевой частоте, тогда помех от него не сильно больше, чем от обычного выпрямителя. Так сделан, например, Agilent U8002.
Что касается измерения помех, тут очень сильно влияет способ подключения земли осциллографа. Даже небольшая петля способна поймать заметную помеху.
Потому что риголу было уже лет 15, и он морально устарел, захотелось чего-то нового, с бОльшим экраном, большей частотой, лучшими характеристиками, на 4 канала. Кстати, когда хотел сделать свой контроллер BLDC, использовал три канала, чего не было на риголе. А, ну и у ригола энкодеры стали сильно глючить.
А меня наоборот, в аудио вообще не тянет. Когда понадобился новый усилитель для компьютера, просто купил на али три набора для сборки, спаял и убрал в корпус, дополнив лишь блоком питания и разъемами. И даже он включается не так часто, т.к. сейчас чаще за компьютером использую наушники, чтобы не мешать.
Еще одно доказательство, что всё, что можно, уже давно придумано) И хоть мне эта идея в голову пришла тогда самостоятельно, но решение оказалось далеко не новым.
Хм. А вот это возможно. Пока я собирал и отлаживал БП, его выход не был заземлен. А сейчас БП заземлен, и осциллограф тоже заземлен, это как раз и дает петлю. Не подумал. Вообще, пару раз уже была мысль отключить заземление выхода в БП, т.к. мешает, например, общий провод осциллографа к плюсу прицепить и от него смотреть.
Внезапно, да? ;)
Я в смысле, если никаких проектов не делаете, зачем вообще осциллограф? Особенно такой дорогой.
Тоже возился с BLDS, смотреть сразу все три фазы никакой нужды нет. Возня с фазами обычно идет на самом начальном этапе — чтобы просто заставить двигатель крутиться. А проблема там в другом — сделать адекватную петлю обратной связи. Как всегда, качество реализации проекта ограничивают мозги, а не осциллограф. Я до сих пор не могу сделать нормальный контроллер ведущего двигателя магнитофона. Когда речь идет о неравномерности вращения порядка сотых процента, описанные в литературе подходы не устраивают.
У каждого свои интересы, это естественно. А я нашел в аудио отдушину — так примитивные проекты могут приносить пользу. Иначе пришлось бы убивать время на всякие модельки ГАЗ-53 и ножики из капана. Заняться больше абсолютно нечем.
Изредка я его куда-то, но подключаю. Вот, на днях подключил к генератору, чтобы показать поведение БПФ на сверхмалых сигналах, иногда тыкаю в блоки питания и другие ремонтируемые приборы. А с хорошей техникой просто приятно и комфортно работать. Да и не очень он дорогой в мире осциллографов, вы вон ссылку на прибор за 6М приводили, это — да, весьма дорого.
Это как сказать. Конечно, если сигналы периодические, можно любое их количество смотреть и на однолучевом по очереди, но совсем ненаглядно и неудобно.
А у меня как раз интересная ситуация вышла — в определенный момент в программе была ошибка, которая приводила к искажению сигнала только на одной фазе. То есть, ошибка-то была в управлении всеми, но так получалось, что она накапливалась и заметный эффект давала на каждый третий раз, после чего управление корректировалось. Из-за, видимо, неких конструктивных особенностей моего двигателя, видно это было всегда на одной и той же фазе, как раз на третьей по счету. И если бы я не подключил все три канала, большая вероятность, что вообще бы не обратил на неё внимание, т.к. дефект там был небольшой, на общее вращение никакого влияния не оказывающий.
И при старте двигателя очень удобно записать сигналы на всех фазах, а потом спокойно анализировать их взаимной поведение. Вот эту задачу никак без 4-х каналов не разрешить. Ну, и просто эстетически красиво видеть все три фазы сразу, когда там образуются ровные одинаковые сигналы, на это приятно смотреть.
Насколько я знаю, этот вопрос решался в магнитофонах физикой — ставился большой маховик, обладающий достаточной инерцией. Да и сотая доля процента — это 1 Гц при 10 КГц, разве такое слышно?
Видел этот обзор. Не моё направление, но я восхитился качеством изготовления и искренне порадовался за человека — он нашел то, что ему нравится и этим занимается. Это же прекрасно. Ведь с теми же магнитофонами абсолютно так же — кто-то другой посмотрит и скажет, что Так что, не надо так, каждому — своё)
Так это на работе, там деньги ничьи.
Ротор двигателя достаточно массивный, он выполняет роль маховика. Но когда я меняю алгоритм регулирования, четко вижу изменение детонации.
У данного магнитофона коэффициент детонации 0.04%, это для всего ЛПМ. Отдельно для двигателя, если смотреть по его датчику скорости, получаю примерно 0.02%. На слух меньше 0.1% незаметно, но это не повод ухудшать характеристики.
Конечно, каждый может заниматься чем угодно. Но когда даже самому себе трудно ответить на вопрос, чем бы заняться, это вызывает беспокойство.
Чтобы воткнуть аналоговую прозвонку в цифровой ММ придется, как минимум, сделать отдельный генератор пищалки плюс схему управления, чтобы цифровая часть тоже могла попискивать. А если пропускать прозвонку через основной процессор и стремиться к латентности 1 мс, он должен уметь обрабатывать прерывания с частотой 1 КГц. Не факт, что тактовая частота и быстродействие процессоров в ММ это позволяют.
А для чего стремиться добиться того, что никак не будет заметно? :)
Некоторое время назад здесь же читал чье-то мнение, что делать надо абы как, лишь бы работало и поставленную задачу решало. Я с этим не согласен, считаю, что делать надо хорошо. То есть, чтобы не просто кое-как задача решалась, а чтобы решалась хорошо. И тогда всё работать будет тоже хорошо. А вот дальнейшие улучшения — уже под вопросом.
Если у вас так же, то зачем особо решать проблему старта? Даже пусть стартует он «так себе», это же происходит один раз. А, в таком случае, старт можно сделать «слепым» — просто последовательно подавать напряжение на обмотки с увеличивающейся скоростью, добиваясь возникновения вращения. А когда оно уже появится, тогда переключаться на основной алгоритм.
Синхронные двигатели были, но это редкость. Даже не могу назвать, где. Своими глазами не видел. В дешевых магнитофонах, типа «Маяков», «Юпитеров» и прочих на базе унифицированного ЛПМ типа УПМ-34, применяется асинхронный двигатель КД6-4. На зависимость скорости вращения от нагрузки просто плюют. К слову, в Электроника-003 (и его прототипе Revox A-700) тоже асинхронный ведущий двигатель, только с регулятором. Проблема регулятора не связана с типом двигателя, точно так же сложно было бы сделать и для асинхронного.
У меня пока старт с множественными колебаниями (перелётами). Это ни в одни ворота. У старой схемы такого не было, а сделать надо не хуже. И никакого особого режима старта там тоже нет, всегда работает одна и та же петля ФАПЧ. К слову, литературы по ФАПЧ двигателей крайне мало, практически ноль.
А зачем? Он практически не шумит, да и энергии вряд ли много потребляет.
В ПИД-регуляторе за колебания и перелеты отвечает Д-часть. Пробуйте её уменьшать, также уменьшать весь коэффициент регулирования. Вы ранее писали:
А как это может быть? Вы имеете в виду, что если на двигатель вообще ничего не подавать, он медленно останавливается? Но ведь можно подавать тормозящее напряжение?
А что будет, если написать программу, которая просто начинает переключать обмотки с определенной скоростью (только с ограничением по току), увеличивает её, доходит до рабочей (с заданным ускорением) и на ней останавливается? Обеспечит ли такая программа нормальный старт или тоже будет дергание?
Да, я в курсе. С коэффициентами ПИД вдоль и поперек всё испробовал. Там дело хитрее, нужен регулятор с более сложной АЧХ, чем можно сделать подбором коэффициентов ПИД.
Да.
Затруднительно это. Да и нет такого в оригинальной схеме, значит не нужно.
В BLDC двигателях переключение обмоток производится по датчику положения ротора. Ну или без датчика, по вычисленному положению ротора. При синусоидальном управлении это даже не коммутация обмоток, а задание нужной фазы питающего напряжения. Фаза постоянно меняется за положением ротора, поддерживая ортогональность полей ротора и статора. В этот процесс влезать нельзя, остается только один рычаг влияния — это ток обмоток. Регулировкой этого тока занята петля стабилизации скорости. И пока есть проблемы с устойчивостью этой петли.
А этот двигатель рассчитан на синусоидальное управление? Они немного отличаются конструкцией, и вряд ли оригинальный контроллер на рассыпухе формировал синусоиду.
С управлением обмотками там не всё так просто. Это длинная тема, но если кратко, то замена штатной схемы на полевые ключи делает работу двигателя неприемлемой — появляется шум с частотой коммутации. Форма тока обмоток там нужна своеобразная.
Старая плата была заточена под конкретно этот мотор. Те же самые конденсаторы в силовых цепях — подбирались именно под данный двигатель. А ваш алгоритм, скорее всего, более универсальный и может управлять любым трехфазным BLDC/PMSM мотором.
Да, есть, индуктивные. И это действительно сильно упрощает дело, положение ротора знаем даже при нулевой скорости.
Я тоже делаю узкоспециализированную плату только для мотора ДБ-95. Исследования штатной платы, сделанной в 80-е годы приводит в уныние — насколько более умными были те разработчики. Приходится по крупицам разгадывать, что было заложено в схемотехнику. Свои страдания я описывал тут: www.leoniv.diod.club/projects/audio/e-004/e-004_capstan/e-004_capstan.html
Еще позабавила экономия 12 мА при том, что КПД схемы мало кого интересует :)
Ну, а по делу — мне кажется, вы идете не в том направлении. Вы пытаетесь повторить функционирование аналоговой схемы на МК. Зачем? Да, она работала. Возможно, она была очень хорошо и аккуратно спроектирована, но у них тогда просто выбора не было, у них не было в свободном доступе МК с миллионами операций в секунду и всего того, что есть сейчас. Вы же сами пишете:
Значит, он для данной задачи не очень подходит. Да и описанный ФЧД не очень подходит — для красивого регулирования на выходе 0 и 1 не достаточно.
Задача управления двигателем предельно проста — вам просто надо поддерживать заданную скорость. На синхронном двигателе! По сути, вам для этого даже никаких датчиков не надо — просто подаем на обмотки сигнал с нужной частотой и двигатель будет вращаться с нужной скоростью. Да, будет гудеть, греться и подергиваться в пределах соседних полюсов, но вращаться с заданной скоростью будет.
Как бы решал эту задачу я:
1. Аналоговых компонентов должен быть минимум, максимум задач решать надо в цифре. Десять лишних строчек кода (пока МК успевает) лучше лишнего конденсатора на плате.
2. Формирование синусоидального напряжения управления двигателем должен осуществлять МК с помощью ШИМ на частоте, которая не слышна и не составит помех аналоговому тракту. Подойдет любой МК с аппаратным ШИМ на три канала, программно делать не надо.
3. В программе есть контроль считываемой частоты вращения с ПИД-алгоритмом — пока частота меньше, мы подаем на двигатель полное напряжение. По мере приближения частоты к требуемой, напряжение снижается, чтобы исключить тот самый перелет.
4. Как только частоты совпадут, алгоритм переходит в режим поддержания фазы между ротором и статором в 90 электрических градусов. Это делается регулировкой напряжения по сигналу с датчиков положения, частота сигнала на силовых обмотках фиксируется. Применяется ПИД-алгоритм, коэффициенты которого зависят от инертности двигателя и скорости его реакции на фазовые сигналы. Если вдруг ротор начинает отставать на определенное число градусов, признаем, что синхронный режим сорвался (по причине слишком высокой нагрузки), можем вернуться к предыдущему пункту или сигнализировать ошибку с полным перезапуском двигателя.
5. Если вдруг пришла команда на снижение скорости, можно:
а) отключить напряжение и ждать, пока двигатель замедлится сам;
б) применить подачу тормозащего напряжения, амплитуду которого также рассчитываем исходя из превышения скорости.
Не берусь утверждать, что гарантировано получу хороший результат с таким алгоритмом, так как ни разу не занимался такого рода задачами, но я бы двигался именно в этом направлении.
Здесь ничего смешного. Штатная схема датчиком, мало того, что потребляет 13 мА, она еще должна питаться напряжением 9 В. Его можно сделать только из входного 24 В. В оригинале был отдельный стабилизатор, который прилично грелся, рассеивая порядка 600 мВт. Тут дело не в экономии электричества, а в конструкции, нужен какой-то радиатор, лишняя площадь платы и т.д.
У меня есть сомнения, что сделать такой контроллер с нуля по-своему не хватит мозгов. Поэтому иду по самому легкому пути — копирование, что должно дать гарантированный результат. Можно посмотреть с другой стороны: какие есть доказательства, что копирование невозможно?
Зато у них было нечто большее — разработчики, которые понимали, что делают.
Тем не менее, в оригинале именно такой ФД, и он работает. Стартует всегда. А у меня можно добиться старта более-менее, но тогда регулирование скорости плохое. А в оригинале хорошо и там, и там. Мне бы ответить на вопрос, в чем разница моей реализации? Кроме разницы в петлевом фильтре, ничего другого не нахожу. Кстати, при полном отказе от цифрового петлевого фильтра, когда сырой сигнал ФД вывожу из МК и подаю на аналоговый фильтр, все работает. Но это меня не устраивает, хочу иметь возможнотсь настройки фильтра для оптимизации равномерости вращения и прочих целей. Не вижу принципиальных причин, почему цифровой фильтр не должен работать. Полоса требуется не очень широкая.
Да, вращаться будет, но плохо. Какой мне толк от этого режима, не пойму.
По пунктам.
1. Согласен полностью. Но, к сожалению, моих знаний не всегда хватает, чтобы заменить конденсатор строчками кода. Например, петлевой фильтр с характеристикой как у оригинала, я в цифре сделать не умею. Поэтому сейчас иду по пути цифро-аналоговой реализации, вожусь с внешним пост-фильтром.
2. Очень рискованный шаг для аудиотехники, не уверен в успешности борьбы с помехами от ШИМ. Даже если это ультразвук, появятся комбинационные составляющие со звуковым сигналом. Вторая проблема — датчики положения ротора не дают значение угла в произвольный момент времени, а имеют дискретный выход. Как рассчитывать угол для синуса? Третья проблема — питание 24 В достаточно только для одной полуволны синуса. Применять мостовые ключевые каскады громоздко и вообще невозможно из-за того, что двигатель имеет общий вывод от всех обмоток. Да и не надо это. Управление фазами устраивает то, какое есть. Проблема только в петле регулирования.
3. Сейчас как раз делаю это — пытаюсь внедрить частотный канал и сделать 2 отдельных ПИД. Такое было в некоторых микросхемах контроллеров двигателей, например, TC9142. Но почему-то во всех новых микросхемах частотный канал выкинули, есть только фазовый. Тут вообще возникает интересный вопрос, почему в аудио всегда двигатели управляются по фазе, а в промышленности — по частоте. При цифровой реализации, по-моему, разница стирается, ибо фаза — это интеграл частоты, добавив интегральное звено к частотному регулятору, получаем аналог фазового. Ничего вразумительного в литературе найти не смог, а сам в этом плаваю.
4. Э-э-э, тут смесь мух и котлет. При чем тут угол между ротором и статором? Управление фазами — это отдельная независимая задача. Угол 90 градусов поддерживается всегда, как на разгоне, так и при работе. И как это возможно «вдруг ротор начинает отставать на определенное число градусов»? При перегрузке ротор может замедлиться, но он всегда будет под 90 градусов к статору. Ибо питание статора формируется из датчиков положения ротора. Может быть, тут имелось в виду, что после разгона переходим от частотного к фазовому регулированию. Но фаза тогда поддерживается не между ротором и статором, а между опорным генератором и таходатчиком. Но в целом это ущербный путь — делить работу двигателя на разгон и вращение. Полно примеров, что можно обойтись без этого. Обычно частотный и фазовый каналы работают одновременно, у каждого свой петлевой фильтр, выходы которых суммируются. Так и пробую сейчас сделать, но появляется куча неизвестных при настройке.
5. Торможение двигателя — это отдельная задача, пока ее не рассматриваю. В идеале надо быстро тормозить реверсным включением. Но это потом.
Копирование, конечно, возможно. Но это заставляет вас решать дополнительные задачи, которые при полностью «цифровом» подходе не нужны. Например, ФЧД и его последующая фильтрация — задача, вытянутая из аналогового мира. Она значительно снижает быстродействие ОС, и вам приходится бороться с колебаниями. В МК же вы можете сразу оперировать углами, получая числовое значение на каждое прерывание от датчика скорости. И, в этом случае, никакого перелета при управлении двигателем не будет, ведь как только вы перестаете прикладывать напряжение, исчезает сила, а, значит, исчезает ускорение. То есть, рост скорости можно остановить моментально.
Никакого. Я этим хотел подчеркнуть, что синхронное управление синхронным двигателем — задача несложная. Тем же коллекторником управлять сложнее.
Если ШИМ оставить внутри платы, поставив фильтры по питанию и по выходу, побороть получится. Но не буду настаивать, тут вам виднее.
Из комбинации скорости вращения и момента прохода каждого датчика.
Да, питание оставить таким же, а форму синуса — подкорректировать.
Синусоидальные контроллеры BLDC же тоже синус, в основном, только одним плечом моста формируют. Зато у вас будет возможность растягивать синус на низкой частоте, наверняка текущая реализация это не может, конденсаторы подобраны лишь под наиболее «популярную» 19-ю скорость.
Может быть, потому, что скорость тут постоянная? И как только мы выходим на неё, все, что нам нужно — это поддерживать фазу?
Было поздно, плохо написал, согласен. Да, управление обмотками осуществляется всегда под 90 градусов. Имелось в виду следующее — внутри МК у вас есть опорный генератор, который определяет желаемое положение ротора. То есть, в любой момент времени, обратившись к нему, вы можете получить значение, под каким углом у вас должен стоять ротор.
По изменению сигнала с датчиков положения (таходатчик вам, по сути, вообще более не нужен) вы определяете моменты, когда ротор проходит какие-то известные точки с известным углом положения. Исходя из этих данных вы:
а) вычисляете скорость вращения ротора (можно хоть по двум соседним сигналам, хоть по усреднению за оборот);
б) определяете, на сколько градусов реальное положение ротора не совпадает с желаемым.
Пункт б — это и есть тот самый угол ошибки регулирования. Только вычисляете вы его уже не с огромной задержкой ФНЧ, а 6 (или 3) раза за электрический оборот. Это позволит сделать вашу ОС очень быстрой, исключив, таким образом, какой-либо перелет скорости вообще. Вы даже можете учесть в программе несимметричность расположения датчиков! Правда, вот тут, для качественного анализа сигналов вам бы не помешал 3-х канальный цифровой осциллограф, но, думаю, на работе посмотреть сможете.
На первый взгляд, не согласен. Задачи разные — разгон и поддержание требуемых оборотов. Соответственно, применение разных алгоритмов в этом случае совершенно нормально. Это как переход источника питания от СС к СV, даже в аналоговой технике в этот момент один ОУ отключается и управление передается другому.
Но настаивать не буду. Что-то мне подсказывает, что если реализовать алгоритм с 6-ю точками контроля положения ротора за электрический оборот, он вполне справится с вашей задачей и без дополнительного алгоритма по частоте. И ПИД тогда только один останется.
ФЧД в любом случае нужен. Пульсации на его выходе можно устранить, хотя и на логике есть вариант с УВХ и с низкими пульсациями. Что касается петлевого фильтра, то его параметры диктуются устойчивостью петли, а не требуемой фильтрацией пульсаций. Для фильтрации и в штатном контроллере достаточно гораздо меньшей постоянной времени. Но не всегда быстрое — значит устойчивое. Сам двигатель является интегратором, он добавляет довольно низкочастотный полюс на общей АЧХ. Чтобы иметь возможность сделать высокое петлевое усиление, надо вводить еще более низкочастотный доминирующий полюс или применять более сложную коррекцию (что и наблюдаем в прототипе).
Так и делаю. Угол — это то, что на выходе ФД. У меня сразу формируется цифровой код угла, а в ФД на логике угол представлен в виде коэффициента заполнения ШИМ. Поэтому у меня нет пульсаций.
Не понял, о чем речь. В данном случае размах требуемого напряжения на каждой обмотке двигателя для получения самой высокой из рабочих скоростей превышает напряжение питания 24 В. Как быть?
Не понимаю, про какие конденсаторы речь. И что такое «растягивать синус»? Понятно, что при синусоидальном управлении частота синуса пропорциональна частоте вращения. Сейчас управление не синусом, а некой сложной формой, что в результате тоже дает хорошие результаты. Я бы в управление фазами не лез, там все уже сделано. Проблема в другом — петле регулирования.
Да ну, это же шаг назад. Частота сигналов с датчиков положения примерно 31 Гц, а с выхода таходатчика — 1348 Гц (это 174 периода за оборот). Именно с этой частотой выполняется алгоритм регулировки скорости.
ФД дает сразу код ошибки фазы, т.е. разницу фазы опорного генератора (таймера) и фазы сигнала с таходатчика.
Угол ошибки я получаю без каких-либо задержек 174 раза за 1 механический оборот (или за 4 электрических).
И получить незатухающие колебания. Петлевой фильтр для того и нужен, чтобы формировать нужную АЧХ петли, чтобы вместе с АЧХ механики она удовлетворяла критерию устойчивости.
Не знаю методики коррекции датчиков. В двигателе кривое всё — и датчики, и обмотки, и магнит. Чего именно надо добиваться — непонятно. Как вариант, изменяя угол коррекции каждого датчика, можно минимизировать колебания скорости. Но тут осциллограф вообще не нужен, отклонение скорости измеряет сам контроллер и значение выводит сервисная программа.
Я имел в виду то, что емкость указанных выше конденсаторов не может подходить под любую скорость вращения двигателя, оно подобрана под 19.05 см/с? А если понадобится перевести в 9.53, напряжение на обмотках будет неоптимальным?
Тогда каким образом у вас возникает перелет по скорости? Вот вышли вы на заданную скорость, наступил момент, когда у вас угол ошибки ноль. Далее у вас скорость продолжает расти вверх, то есть, угол ошибки начинает увеличиваться, а двигатель — разгоняться. Но разгоняете его вы, подавая более высокое напряжение на его обмотки. Почему бы не снизить напряжение ровно в этот момент?
Я этот перелет вижу как недостаточная скорость реакции обратной связи — заданная скорость уже наступила, но контроллер продолжает еще разгонять двигатель, пока петля ОС не «очухается» и не скажет «хватит».
Так сейчас у него не синусоидальное управление. Более того, управление «однотактное», каждая обмотка включена лишь треть времени. Можно сформировать одну полуволну синусоиды, но для полного синусоидального управления нужен мост или удвоенное питание. Но зачем все это, если и так вращается?
Из-за петлевого фильтра. На входе ошибка стала равной нулю, а на выходе только через некоторое время прекратится воздействие.
Петлевой фильтр такой. Я могу как угодно менять коэффициенты, могу ускорить, но тогда не будет устойчивости. Я же писал про полюс, создаваемый двигателем, и с этим надо что-то делать. Иначе сдвиг фаз в петле становится критическим еще до того, как усиление упадет до единицы.
В этом случае, вся времязадающая логика формирования управляющих напряжений ложится на МК и схема становится универсальной. Однако, если в вашей схеме конденсаторы работают лишь в моменты включения и выключения фазы, а ключи управляются прямоугольным напряжением, то может смысла менять что-то и нет, и эту часть можно оставить «аналоговой».
Возможно, задача управления двигателем, на самом деле, более сложная, чем первоначально казалось. Однако, быстрое гугление показывает, что разработок в этой области весьма много, и много где даже приводятся графики, где скорость быстро растет до заданной, после чего стоит «как вкопанная» даже при изменении нагрузки на валу. Детально в статьи не вчитывался, там достаточно большой объем, однако, как я понимаю, в этих разработках коэффициенты ПИД меняются непосредственно в процессе работы.
В теории, пока вы разгоняете двигатель, на него надо подавать максимальное напряжение. Как только двигатель разогнался, амплитуду надо снизить до такой, которая соответствует вращению с заданной скоростью. В этом случае разгон будет идеальным без каких-либо перелетов. Однако, вы не знаете рабочего напряжения двигателя, т.к. оно зависит от нагрузки на валу. Но, наверное, можно попытаться вычислить нагрузку на валу по характеристике разгона двигателя и подкорректировать модель перед переходом в режим удержания скорости.
И еще одна интересная идея. В бытовой сети коммутация сегментов осуществляется в момент совпадения фаз напряжений в них. Далее никакого дополнительного контроля за фазами не требуется — генераторы синхронизируются автоматически. Если какой-то начинает слишком сильно разгоняться, на него а) увеличивается нагрузка, б) оказывает тормозящий эффект само напряжение сети. А что, если то же самое попробовать применить в магнитофоне? То есть, достигнув заданной скорости вращения, мы начинаем подавать на обмотки двигателя синусоидальное напряжение нужной частоты, таким образом, обеспечивая его вращение именно с этой скоростью и фазой.
Да, я тоже встречал адаптивные алгоритмы, но это за гранью моих математических возможностей. В магнитофонах как-то обходятся без этого. Правда, в том же Orari много подстроечников в контроллере ведущего двигателя, на каждую скорость отдельно Gain Adj и Damp Adj. Настройку предлагают вести по минимуму детонации.
Параметрические алгоритмы — это лишние заботы. Пусть обратная связь решает сама, какое напряжение надо двигателю. Так сделаны все известные мне контроллеры ведущих двигателей.
Это шаг назад. Вы предлагаете самый примитивный вариант питания синхронного двигателя, имеющий кучу недостатков. Сейчас реализовано фактически векторное управление двигателем (частично аппаратно), которое имеет преимущества не только по КПД, но и по шуму и равномерности вращения. Вряд ли тут получится что-то изобрести новое (для этого не хватает знаний), поэтому и стараюсь копировать старое решение.
Пусть, конечно. Но ведь не решает же, иначе бы этого диалога не было. А это означает, что следует посмотреть альтернативные решения.
Разве это векторное управление? Вы не контролируете ток обмоток, не пересчитываете, не позиционируете и не подстраиваете его под требуемый момент вращения. Фактически у вас реализован коллекторный двигатель с хитрым питанием, которое снижает генерируемые помехи. Иметь в распоряжении трехфазный синхронный двигатель переменного тока и превратить его в коллекторный — вот настоящий шаг назад.
Я предлагаю использовать разные варианты, а не зацикливаться на попытке повторить аналоговое управление в цифровом исполнении (тоже шаг назад, кстати). В конце концов, вам же нужен результат, может проще вообще специализированный контроллер типа drv10987 поставить?
Обоснуйте, чем коллекторный двигатель плох? Только наличием коллектора как ненадежного элемента, но здесь его нет. Ну и отсутствием гибкости, которая нужна только для всяких трюков, типа абсолютного позиционирования.
Мне кажется, это единственный реальный вариант. Сделать всё по-своему у меня не хватит знаний в теории электропривода.
Этот контроллер даже близко не обеспечит характеристик, которые дает старая аналоговая схема.
Этот разговор не имеет смысла. Чтобы куда-то продвинуться, нужна практическая работа с двигателем. Все эти теории там быстро разбиваются.
Ничем он не плох, но PMSM предоставляет больше возможностей в точном управлении, которые можно задействовать в вашем решении. Поэтому это и есть шаг назад — сделать-то можно и так, но зачем?
А поддержание заданной угловой скорости разве не есть абсолютное позиционирование?
В таком случае, повторите цифровую логику оригинала на плис и закройте вопрос — вам же лишь размер платы мешал? А аналоговую часть вы всё равно уже всю перетащили.
Да, такого двигателя у меня нет (да и вообще BLDC с датчиками нет), попробовать в железе не могу. Вы тоже не желаете пробовать что-то кроме попытки повторить аналоговое управление 90-х годов, так что, пожалуй, закончим.
Да, можно так сказать. Он контролирует направление вектора (опять с поправкой на дискретность коллектора, но у некоторых двигателей пластин коллектора очень много). Остается контролировать длину вектора с помощью петли регулировки скорости, например. В любом векторном контроллере это тоже отдельная петля.
Нет.
Зачем тут ПЛИС? Я и на микроконтроллере могу повторить. Это я уже пробовал, нормально работает в паре с аналоговым петлевым фильтром. Но цифровой фильтр более гибкий, я с ним получил вдвое меньшую неравномерность вращения. Вот хочу еще добить старт.
Я не хочу пробовать очевидные глупости, которые Вы предлагаете. В начале работы с этим двигателем аналогичные глупые мысли были и у меня в голове. Но практика их быстро очистила. Не перестаю удивляться мудрости разработчиков, которые делали аналоговую схему. Лучше, пожалуй, и не сделать. Ни мне, ни Вам с ними не тягаться. И да, это управление не 90-х, а скорее конца 70-х годов, именно тогда появились такие двигатели на Otari.
Tek 2465B(DM) покажет и цыферки и все что хошь. И при этом может тоненький всплеск.
А в DSO измерения производятся ровно по тем же данным, которые и отображаются на экране. То есть, я могу быть уверен, что вычисленные значения соответствуют тому, что я вижу. Вопрос, насколько то, что я вижу соответствует тому, что на входе, мы опустим, т.к. это и есть предмет спора цифра-vs-аналог :)
но сам скоп выводит инфо о сигнале что попросишь
картинка не моя но тут видно — и этот без Dmm
может многолучевая трубка…
И измеряет он далеко не всё:
При этом точность:
Конечно, реализация таких возможностей для аналогового осциллографа того времени отличная. Но у меня, например, был отечественный С1-64, который тоже так умел. При однолучевой трубке у него было два канала. Смотреть можно было или по очереди, или вот в таком вот chopped режиме.
Если разные методики настройки, и они «лучше» по довольно индивидуальным критериям, а вовсе не объективно.
А вообще, в отношении подхода к изготовлению самоделок многим бы поучиться в части аккуратности. У меня так даже при наличии фрезера и токарника не получается.
Я тоже балдею от педантичного подхода (если не сказать перфекционизма) всех изделий Леонида Ивановича.
И это касается, как подхода к схематике, так и к красивому коду программ и, конечно же, ко внешнему виду.
Я с более приземлёнными вещами трачу месяцы и годы, чтоб хоть какой-то результат получить. Даже взять самое простое, без всяких процессоров и схем с расчётом индуктивностей: обычный провод для ATX блока питания: моментально миллион вопросов: где взять недорого разъёмы и как они называются? (названия нашёл, и то самих железок, но не плассмасок, которые с разными ключами, а вот с ценой всё печально). Потом где брать провода, желательно цветные? (цветные так и не нашёл, а одноцветные силиконовые, благодаря обзорам MySku впринципе наверное подойдут)… а реально взял и разъёмы и провода от старых блоков питания, и из половинок и кусочков проводов слепил нужное, а с разъёмами поступил ещё проще — нарезал из них кусочков нужной конфигурации, и аккуратно впихнул в б.п. (раз и навсегда). Все остальные мои поделки примерно такого же «качества».
Поэтому ваша статья о том магнитофоне — для меня выглядит, как сказка-мечта о Дед Морозе. Не бывает такого в реальной жизни! :)))
Особенно меня порадовала инструкция по ремонту. Не знал, что такие книжечки вообще существовали!
— вот я именно об этом. Нужно точку соединения нагрузить а уже с нее снимать сигнал, а то у вас там как-бы непонятно что будет, хоть и похожее на выходной сигнал. Сопротивления не согласованы. Почему я об согласовании/развязке операционниками и вспоминал.
Нагружать точку соединения резисторов — зачем? Когда сигналы на выходах каналов L и R одинаковы, на выходе будет то же самое. Если в одном канале тишина — на выходе будет половина напряжения одного канала. Ну и так далее.
А не может ли уважаемый автор подсказать переключатели с гораздо более демократичной ценой и чтоб качественно переключали, без пропадания контактов и т.п.? Ведь напряжения и токи в таком коммутаторе маленькие и не каждый переключатель будет работать, как мне уже показала жестокая практика. :)