Постройка самодельного складного коптера

Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком.
Сначала немного предыстории. Rc тематикой болен около 3х лет, и за это время собрал несколько самосборных коптеров. И вот захотелось сделать компактный дрон, что бы и в рюкзак помещался и в сумку мотоцикла, словом что бы можно было взять с собой куда угодно… ну почти, и обязательно самодельный.
Если вы решили всерьез заняться RC тематикой, то, скажем так, моделей у вас будет много разных, но вот три вещи, покупаются всерьез и надолго.
1. Зарядка для акумуляторов. Здесь я пожадничал, и купил неоригинал Imax B6 AC. . Хоть и неоригинал, но работает исправно уже четвертый год.
. Хоть и неоригинал, но работает исправно уже четвертый год.
2. Аппаратура радиоуправления. Я свою брал три года назад, на тот момент лучшую из бюджетных Radiolink AT9. . Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S https://aliexpress.com/item/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис.
. Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S https://aliexpress.com/item/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис.
3. FPV очки или шлем. Тут вопрос довольно индивидуальный, нужно мерить конкретный образец именно на Ваше лицо. Многим не подходит фокусное расстояние некоторых шлемов, многих не устраивает форма маски некоторых очков, а может и не подойти межзрачковое расстояние. Что до меня, я начинал летать в старых очках Fatshark, о них даже говорить не буду, ибо настолько убогие, что просто нет слов. Затем использовал шлем Eachine EV800. https://aliexpress.com/item/item/New-Arrival-Eachine-EV800-5-Inches-800x480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1
https://aliexpress.com/item/item/New-Arrival-Eachine-EV800-5-Inches-800x480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1  . Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у.
. Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у.
А сейчас давайте перейдем непосредственно к самому коптеру, начнем пожалуй с рамы. Рама это одна из немногих вещей, купленых не в Китае, так что особо останавливаться на ней не буду. Скажу только, что рама конструкции Андрея Грушина. С учетом использования современных комплектующих, укоротил ее на 75мм. forum.rcdesign.ru/blogs/121800/blog20789.html Она сделана из текстолита и алюминиевого профиля 10мм. Акумулятор я использовал Onbo 4S 4200 mAh 35c.
Акумулятор я использовал Onbo 4S 4200 mAh 35c.  Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR
Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR  https://aliexpress.com/item/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html">, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.
https://aliexpress.com/item/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html">, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.  Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а
Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а 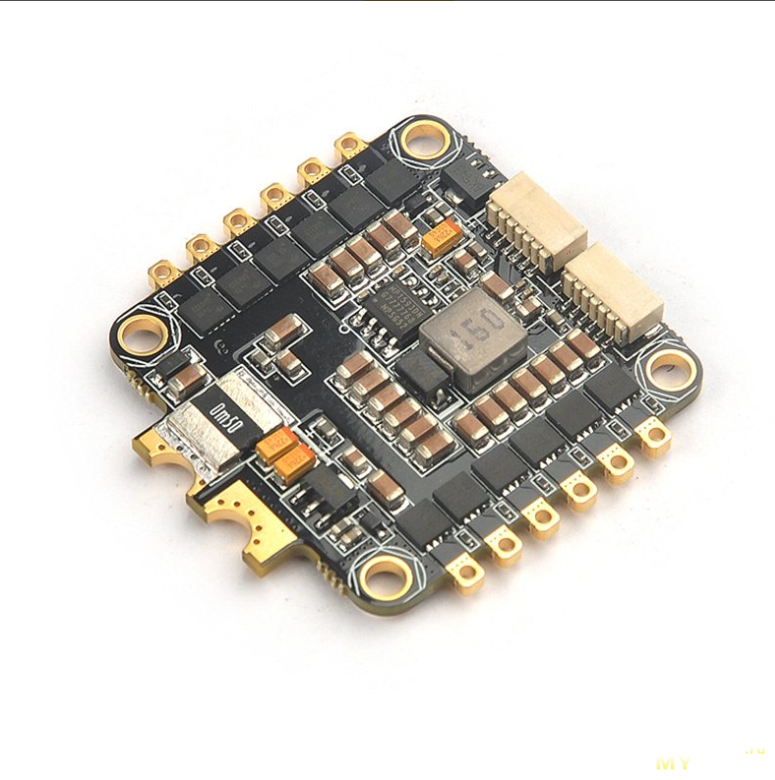 https://aliexpress.com/item/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D
https://aliexpress.com/item/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D  , но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D
, но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D  Брал тут, только он сильно подорожал https://aliexpress.com/item/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi
Брал тут, только он сильно подорожал https://aliexpress.com/item/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi  Брал тут https://aliexpress.com/item/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок
Брал тут https://aliexpress.com/item/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок  Вот ссылка… https://aliexpress.com/item/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.
Вот ссылка… https://aliexpress.com/item/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.
Продолжаем. Видеопередатчик, для онлайн передачи видеосигнала на землю, временно поставил самый дешевый Boscam Ts5828 мощностью 600 мВт. Брал тут https://aliexpress.com/item/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую
Брал тут https://aliexpress.com/item/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую  Брал их тоже на Али https://aliexpress.com/item/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm
Брал их тоже на Али https://aliexpress.com/item/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm 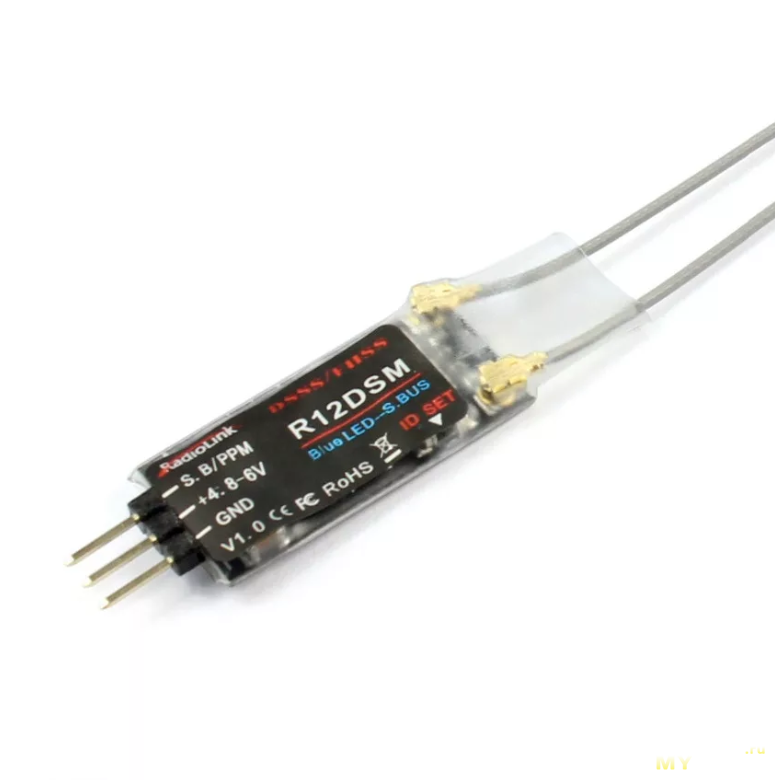 , предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100
, предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100 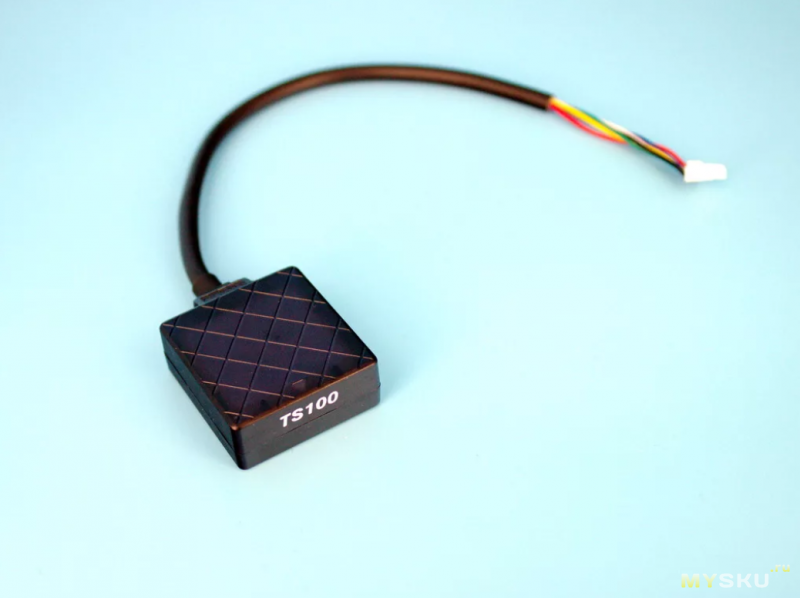 Брал тут https://aliexpress.com/item/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую
Брал тут https://aliexpress.com/item/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую  вот ссылочка на нее… https://aliexpress.com/item/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.
вот ссылочка на нее… https://aliexpress.com/item/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.  . Вот тут брал… https://aliexpress.com/item/item/F05309-9x4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.html
. Вот тут брал… https://aliexpress.com/item/item/F05309-9x4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.html
Ну что, с комплектацией вроде все, если что забыл, ткните носом. Приступаем к сборке. Заранее приношу извинения за качество фото и их малое количество. Слишком был увлечен процессом. Итак поехали!
Первым делом отрезаем кусочки 10мм профиля на нужную длину (какие хотим в итоги лучи) и сверлим отверстия для крепления моторов, прокладки проводов и антен приемника радиоуправления. Получается как то так.... , крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так...
, крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так... . На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так....
. На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так.... . Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ....
. Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ....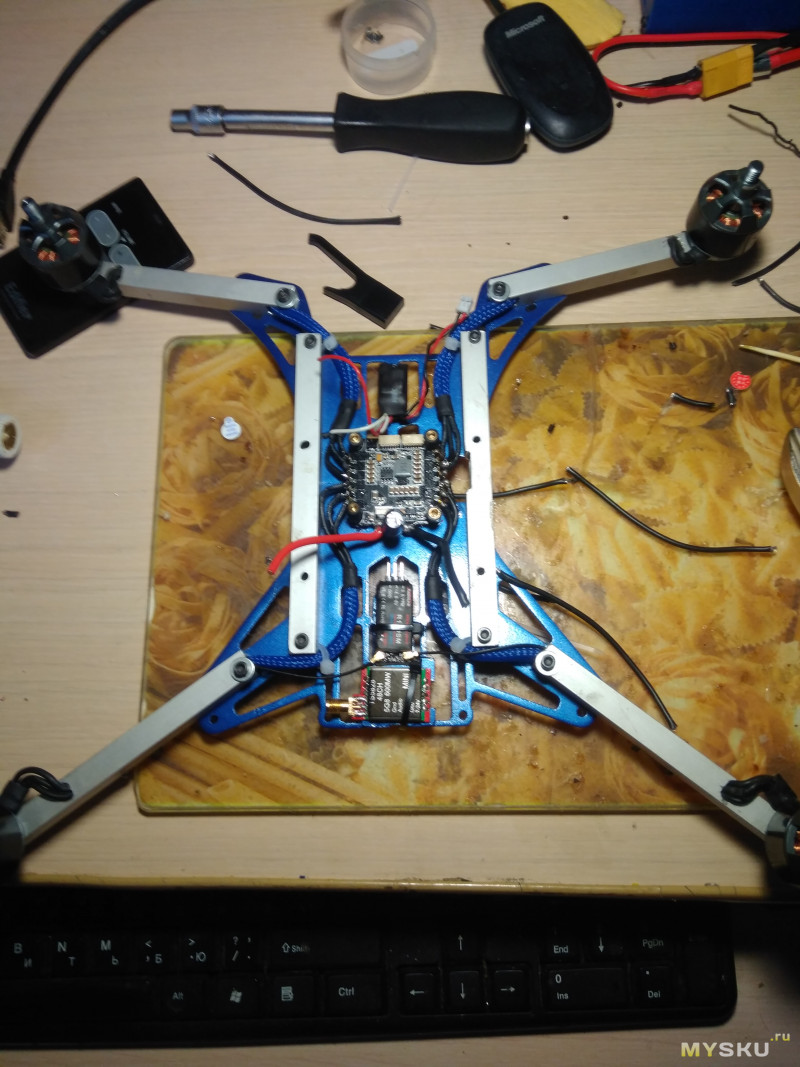 Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)
Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)  , но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) ...
, но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) ...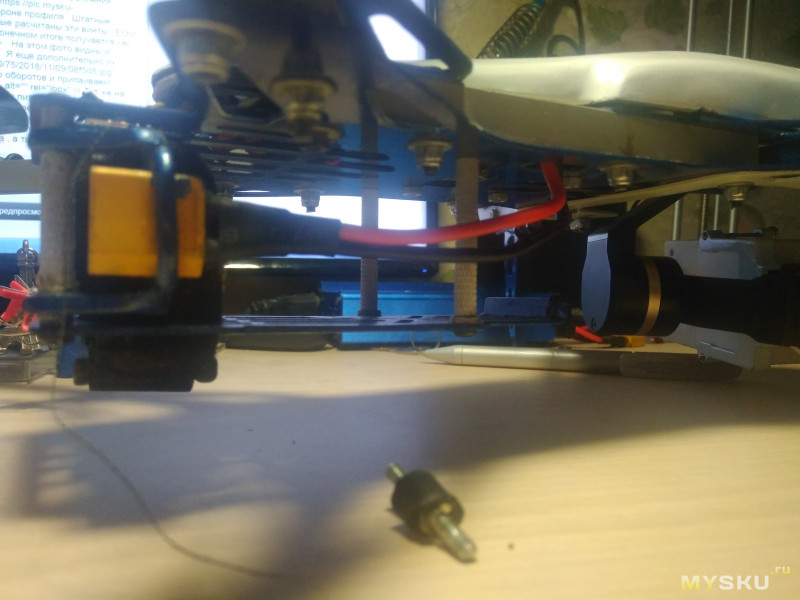
 … как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она....
… как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она....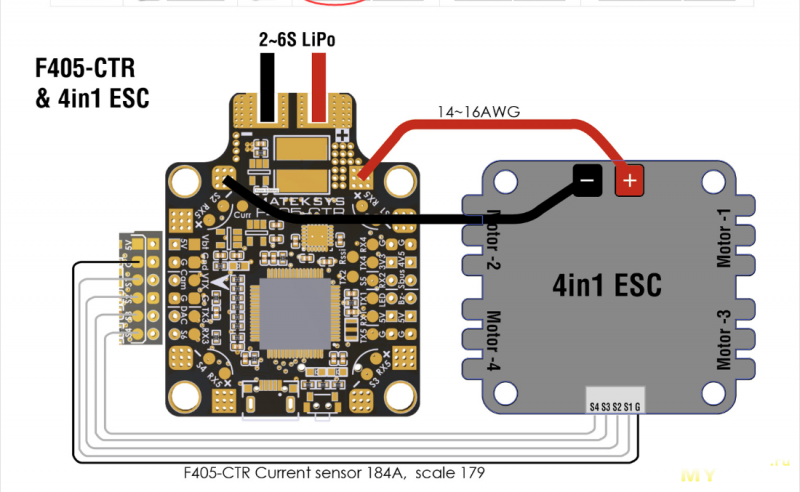 по этой схеме подключается регулятор, а вот по этой все остальное....
по этой схеме подключается регулятор, а вот по этой все остальное....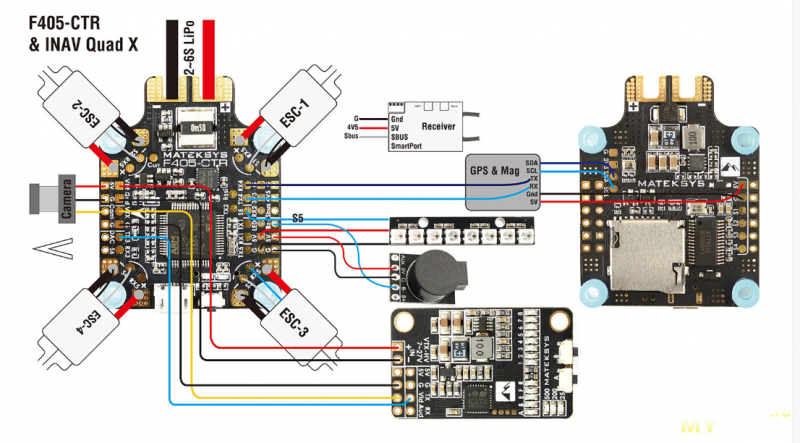 . Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так....
. Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так....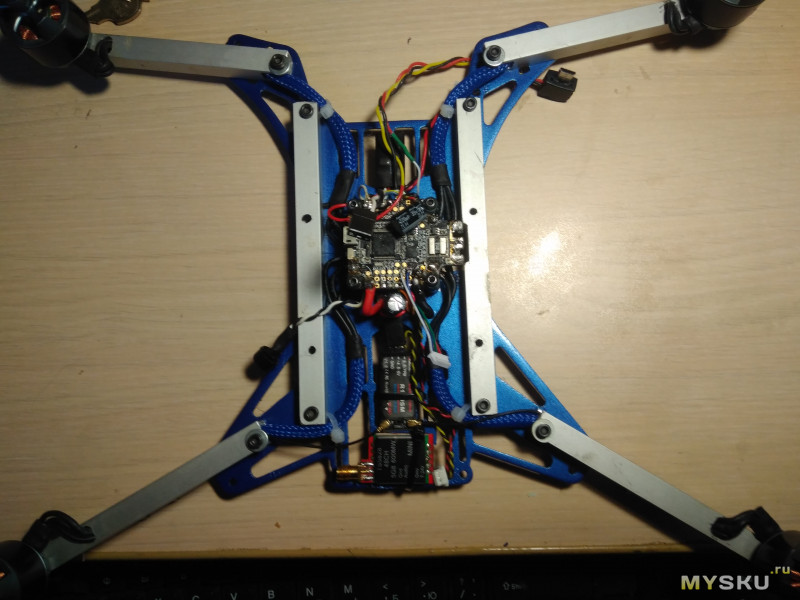 . На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора...
. На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора... . Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a
. Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a  По традиции ссылка вот
По традиции ссылка вот
https://aliexpress.com/item/item/Best-Deal-4PCS-Racerstar-RS30A-Lite-30A-Blheli-S-BB1-2-4S-Brushless-ESC-For-FPV/32761032518.html… и платой распределения питания от Матек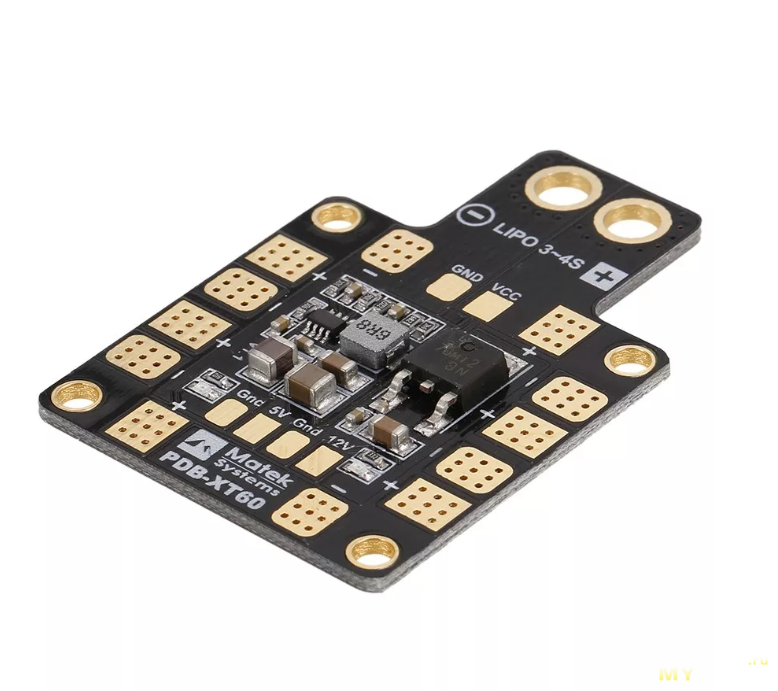 На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей ...
На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей ...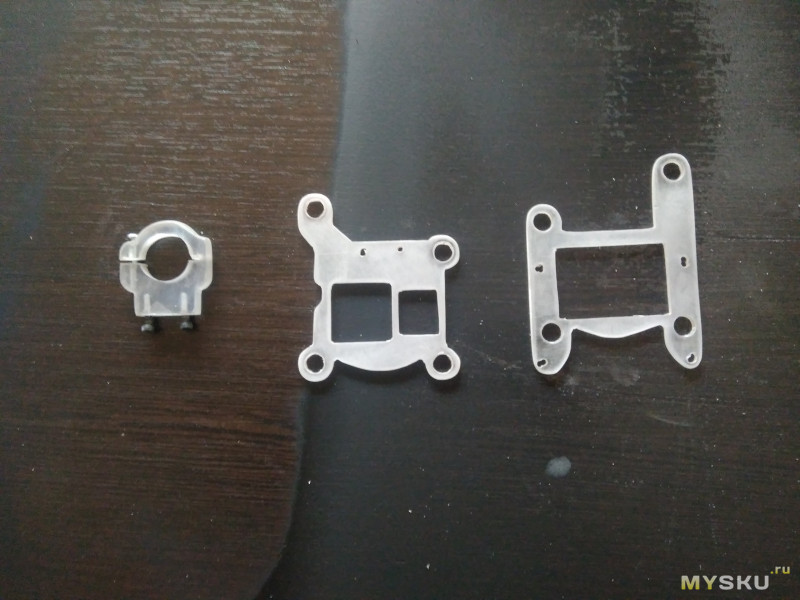 У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так....
У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так.... Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось
Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось 
 Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Ну вот вроде бы все, пробуем взлететь и… К сожалению выяснилась одна неприятная особенность. Поток воздуха от передних винтов срывал камеру с места и подвес был не в силах ее стабилизировать. Я пробовал менять настройки, закрывать камеру сверху козырьком (колхоз, но все таки), ничего не помогало. Пришлось продать подвес Валкера и искать другой. Взял Tarot t-3d. Дело в том, что у данного подвеса есть один косяк (кроме фирменного завала горизонта конечно), расстояние между демпферами по длине еще нормальное, но вот по ширине они расположены очень близко друг к другу. Из-за это при ветре может наблюдаться раскачка подвеса и желе. Пришлось немного переделать его нижнюю пластину и расположить демпферы под углом. Такая конструкция зарекомендовала себя очень хорошо на прошлых вариантах подвесов. Далее все просто, креплю подвес на переходную пластину. Ее я сделал из текстолита и получилась она довольно веселой.... . И собственно устанавливаю готовый подвес на нее .
. И собственно устанавливаю готовый подвес на нее . . Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления ....
. Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления .... И вот такой размер в разложеном состоянии....
И вот такой размер в разложеном состоянии.... .
.
Ну и напоследок немного своих мыслей. Если вам нужен компактный коптер для съемки, то повторять этот проект не очень советую, если только вы не любите собирать, паять и настраивать больше, чем летать. Во первых, он выйдет не дешевле готовых коптеров, во вторых он потребует огромного количества терпения, внимания и усидчивости при настройке, к чему далеко не каждый готов. Что касается меня, то у меня вся периферия (видео очки, аппаратура радиоуправления, акумуляторы, зарядка и камера ) уже была и используется и на других моделях, по этому этот коптер не сильно ударил по карману. Ну и готовые коптеры мне в принципе не интересны, и летать смотря в телефон я вообще не могу. А вот и пример видео съемки с этого квадрика www.youtube.com/watch?v=5io3sqrCsDk&t=0s&list=PL9-3NMPHry-hSREdbJd5T7dOUbJO-mYBM&index=12
Вот такой вот получился рассказ. В чем ошибся, или накосячил, пишите в комментариях, обоснованную критику всегда поддерживаю. Всем пока
Сначала немного предыстории. Rc тематикой болен около 3х лет, и за это время собрал несколько самосборных коптеров. И вот захотелось сделать компактный дрон, что бы и в рюкзак помещался и в сумку мотоцикла, словом что бы можно было взять с собой куда угодно… ну почти, и обязательно самодельный.
Если вы решили всерьез заняться RC тематикой, то, скажем так, моделей у вас будет много разных, но вот три вещи, покупаются всерьез и надолго.
1. Зарядка для акумуляторов. Здесь я пожадничал, и купил неоригинал Imax B6 AC.
. Хоть и неоригинал, но работает исправно уже четвертый год. 2. Аппаратура радиоуправления. Я свою брал три года назад, на тот момент лучшую из бюджетных Radiolink AT9.
. Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S https://aliexpress.com/item/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис. 3. FPV очки или шлем. Тут вопрос довольно индивидуальный, нужно мерить конкретный образец именно на Ваше лицо. Многим не подходит фокусное расстояние некоторых шлемов, многих не устраивает форма маски некоторых очков, а может и не подойти межзрачковое расстояние. Что до меня, я начинал летать в старых очках Fatshark, о них даже говорить не буду, ибо настолько убогие, что просто нет слов. Затем использовал шлем Eachine EV800.
https://aliexpress.com/item/item/New-Arrival-Eachine-EV800-5-Inches-800x480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1 . Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у. А сейчас давайте перейдем непосредственно к самому коптеру, начнем пожалуй с рамы. Рама это одна из немногих вещей, купленых не в Китае, так что особо останавливаться на ней не буду. Скажу только, что рама конструкции Андрея Грушина. С учетом использования современных комплектующих, укоротил ее на 75мм. forum.rcdesign.ru/blogs/121800/blog20789.html Она сделана из текстолита и алюминиевого профиля 10мм.
Акумулятор я использовал Onbo 4S 4200 mAh 35c. Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR https://aliexpress.com/item/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html">, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312. Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а https://aliexpress.com/item/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D , но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D Брал тут, только он сильно подорожал https://aliexpress.com/item/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi Брал тут https://aliexpress.com/item/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок Вот ссылка… https://aliexpress.com/item/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.Продолжаем. Видеопередатчик, для онлайн передачи видеосигнала на землю, временно поставил самый дешевый Boscam Ts5828 мощностью 600 мВт.
Брал тут https://aliexpress.com/item/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую Брал их тоже на Али https://aliexpress.com/item/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm , предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100 Брал тут https://aliexpress.com/item/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую вот ссылочка на нее… https://aliexpress.com/item/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47. . Вот тут брал… https://aliexpress.com/item/item/F05309-9x4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.htmlНу что, с комплектацией вроде все, если что забыл, ткните носом. Приступаем к сборке. Заранее приношу извинения за качество фото и их малое количество. Слишком был увлечен процессом. Итак поехали!
Первым делом отрезаем кусочки 10мм профиля на нужную длину (какие хотим в итоги лучи) и сверлим отверстия для крепления моторов, прокладки проводов и антен приемника радиоуправления. Получается как то так....
, крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так.... На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так..... Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ....Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился) , но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) ...… как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она....по этой схеме подключается регулятор, а вот по этой все остальное..... Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так..... На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора.... Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a По традиции ссылка вот https://aliexpress.com/item/item/Best-Deal-4PCS-Racerstar-RS30A-Lite-30A-Blheli-S-BB1-2-4S-Brushless-ESC-For-FPV/32761032518.html… и платой распределения питания от Матек
На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей ...У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так....Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой. Ну вот вроде бы все, пробуем взлететь и… К сожалению выяснилась одна неприятная особенность. Поток воздуха от передних винтов срывал камеру с места и подвес был не в силах ее стабилизировать. Я пробовал менять настройки, закрывать камеру сверху козырьком (колхоз, но все таки), ничего не помогало. Пришлось продать подвес Валкера и искать другой. Взял Tarot t-3d. Дело в том, что у данного подвеса есть один косяк (кроме фирменного завала горизонта конечно), расстояние между демпферами по длине еще нормальное, но вот по ширине они расположены очень близко друг к другу. Из-за это при ветре может наблюдаться раскачка подвеса и желе. Пришлось немного переделать его нижнюю пластину и расположить демпферы под углом. Такая конструкция зарекомендовала себя очень хорошо на прошлых вариантах подвесов. Далее все просто, креплю подвес на переходную пластину. Ее я сделал из текстолита и получилась она довольно веселой....
. И собственно устанавливаю готовый подвес на нее .. Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления ....И вот такой размер в разложеном состоянии.....Ну и напоследок немного своих мыслей. Если вам нужен компактный коптер для съемки, то повторять этот проект не очень советую, если только вы не любите собирать, паять и настраивать больше, чем летать. Во первых, он выйдет не дешевле готовых коптеров, во вторых он потребует огромного количества терпения, внимания и усидчивости при настройке, к чему далеко не каждый готов. Что касается меня, то у меня вся периферия (видео очки, аппаратура радиоуправления, акумуляторы, зарядка и камера ) уже была и используется и на других моделях, по этому этот коптер не сильно ударил по карману. Ну и готовые коптеры мне в принципе не интересны, и летать смотря в телефон я вообще не могу. А вот и пример видео съемки с этого квадрика www.youtube.com/watch?v=5io3sqrCsDk&t=0s&list=PL9-3NMPHry-hSREdbJd5T7dOUbJO-mYBM&index=12
Вот такой вот получился рассказ. В чем ошибся, или накосячил, пишите в комментариях, обоснованную критику всегда поддерживаю. Всем пока
Самые обсуждаемые обзоры
| +203 |
3198
123
|
| +18 |
729
33
|
| +80 |
4870
38
|
И попросите маму, чтобы она вам грамматические ошибки поисправляла.
ъъъъъъъъъъъъъъъ
Я так понимаю, написать — написал, а комментарии не читаем?
Долго топик уже висит.
Странный способ набирания минусов в карму…
«Итак кому интересно вэлком.»
ьььь
Здравствуйте.
Да мне то ни чего не интересно уже. Потух интерес. На след год интересом будет поднять стены на кухню и если все будет в идеал, то заработать на крышу и поднять ее )))
странно, но голосовалка не работает… или люто минусуют.
и вопрос к автору: почему дюраль, а не модный нынче карбон?
Отличный обзор. У меня терпения не хватит все дождаться по частям с Али.
Другой вопрос, куда администрация смотрела :)
Карбону сверление пофиг, если то реально карбон(carbonfiber)
Имею опыт изготовления корпусов для ультрабуков.
Хотя по правде из плюсов у них только одно — они намного дольше сопротивляются стеклотекстолиту, чем стальные. карбоний помягче и не настолько абразивен, стальные должны жить. Главное заточить правильно.
Но сверлят твердосплавки просто «моя прэлэсть» :)
Не ломаются ибо плата жёстко крепится и подающий механизм без перекосов.
просто не знает про CUT
↓Add: 677##, то есть уже давно начатый
Если что-то снимать, то для меня это реально на несколько раз. Сидеть что-то монтировать потом не для меня — не хватает усидчивости. Покупать ради того, чтобы взять его раз в год заграницу — тоже такая себе трата денег, сумма то не маленькая.
у всех он получится свой), но и авторская цифра будет полезна…
То что дорого, ну увы, дешево это из другой оперы.
Хотя вы про какой мавик? Я говорю о Про, там все работает. Про Эйр не уверен.
Во вторых, что значит — нельзя, на премодерацию попасть может, это максимум.
В третьих, вставить кат это никак не мешает.
Нажимаете — «Редактирование» под названием обзора, ставите курсор под предисловием, нажимаете кнопу с ножничками, тычете — «опубликовать». Не выделяете текст, а просто ставите курсор.
Мне от души понравилось, а главное, я уловил вашу причину/желание складного, но своего… Респект.
сообщение было бы гораздо полезней
так могли бы и ссылку найти, Вы же знаете что это за рама, название, спецификацию
Тоже собирал самодельный коптер на складной раме, потратил кучу денег, но до Мавика ему как до Луны. После покупки Мавика самодел пылится без дела
Спектр готовых дронов под эти задачи такой, что нет никакого смысла заниматься самосбором — готовое будет намного качественнее и лучше. Это как с автомашинами — да, можно заморочиться и собрать машину своими руками. Но это обойдётся в разы дороже готовой и будет сильно менее качественное. Также и с дронами.
Еще 3-5 лет назад ситуация была другой — и ассортимент был сильно хуже и дорого было очень. Но сейчас всё — самостоятельная сборка имеет смысл только как чистый DIY — хобби в чистом виде.
У меня стоит ящик с разными компонентами для дронов, готовый дрон и пара дронов в состоянии «собраны, но не доведены до ума». Надо побороть лень, инвентаризировать и всё распродавать.
Джедаи да, топ.
Чтобы собрать качественный самосбор нужны качественные дорогие комплектующие — движки, подвес, камера
Нужна тщательная настройка и балансировка, и даже при этом все равно сложно достичь качества DJI.
Если хотите съэкономить и получить коптер, аналогичный DJI, то в итоге потратите кучу денег, времени и нервов, но не достигнете желаемого результата.
Мое чудовище лежит в диване второй год " на ремонте".
На выходных полетал на хабсане, кайфанул и убрал обратно.
Не страшно было на моторы под 3 банки ставить 4S? Или вы про специфакации и не знали?
КПД под 3 банки на этих пропах отличное, было бы. Думаю, на 4 эффективнее будет на 8 дюймах.
www.21vek.ru/construction_toys/1042_tehnok.html
forum.rcdesign.ru/blogs/58558/blog19749.html
А потом он взлетел на 2км вверх и улетел в китай %)
А в остальном автор — молодец! Сам как-то всё мечтаю как раз о лёгком и компактном (таком, как Мавик) варианте для съёмок (где очки — только дорогая обуза). Тем более, что регулярно бываю в разных красивых местах:
Вот бы где коптер пригодился!
Кстати по поводу виброразвязки ПК: у меня тоже датчик тока на нем и провода тоже толстые, но я придумал по-моему очень удачное решение. Логи еще не смотрел, но проблем с полетом на 17" пропах нету. Это кусочки силиконовой изоляции 12AWG надетые внатяг на винты M3. Высота такой ножки подбирается оптным путем. Это уже второй эшелон защиты, а первый стандартный- развязка этажа ВМГ от этажа на котором лежит полётник.
Просто давно хочу собрать себе трикоптер.
P.S. Я несколько лет как отошел от авиамодельной темы:)
А квадрокоптер без крашей это все равно что зам.министра без откатов.
кто-нибудь может поделиться личными впечатлениями переноса электроники от Фантома-3 в корпус Мавика?
про этот корпус спрашиваю — https://www.banggood.com/DJI-Phantom-3-DIY-Modified-Kit-To-DJI-Mavic-Pro-For-DJI-Phantom-3A3P3SE4K3S-Version-p-1236273.html