Луноход Электроника на Arduino

Доброго времени суток читатели Муськи!
Сегодня я расскажу вам о второй жизни лунохода Электроника. Кому интересно прошу под cut:
Восьмидесятые:
В 1986 году на день рождения дядя подарил мне программируемый луноход Электроника. До конца восьмидесятых луноход исправно работал. Далее появились программные глюки луноход включал «лазер» по делу и без дела во время выполнения программы. Закончилось это дело тем, что любая программа выполнялась как бесконечная стрельба… Найти новый прошитый микроконтроллер «уу-1» не представлялось возможным и луноход был убран на дальнюю полку.


Наши дни:
Луноход был извлечён с дальней полки, разобран. Плата с дохлой уу-1 отправилась в коробку с золотосодержащими микросхемами (а золото там даже внешне видно ничего выкусыаать не надо). Контакты под 4*373 (D) и под крону были демонтированы.
Собственно что имеем:
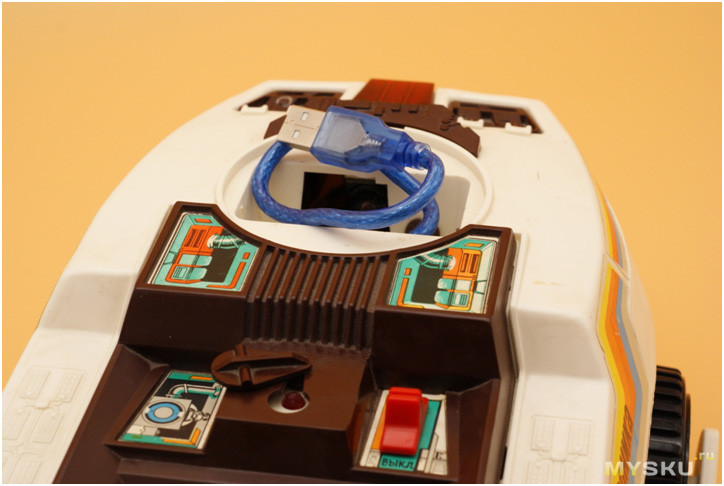
Корпус в состоянии 5+
Полностью исправные моторы (тип танк/трактор правый/левый мотор)
Ведущие колёса с резиновыми кольцами. Резина как новая…
Динамик
Датчик наезда на препятствие в виде двух микриков и планки.
В «бластере» лампочка накаливания была заменена на светодиод.
Была изготовлена NI-CD батарея 8,4v 0,9Ач

Можно было конечно литиевую батарею сделать, но у меня от шуруповертов куча nicd. Выбрал лучшие банки, собрал батарею.
Как показала практика данной батареи для этой игрушки за глаза…
За основу решил взять какой нибудь открытый проект. Нашел на cxem.net
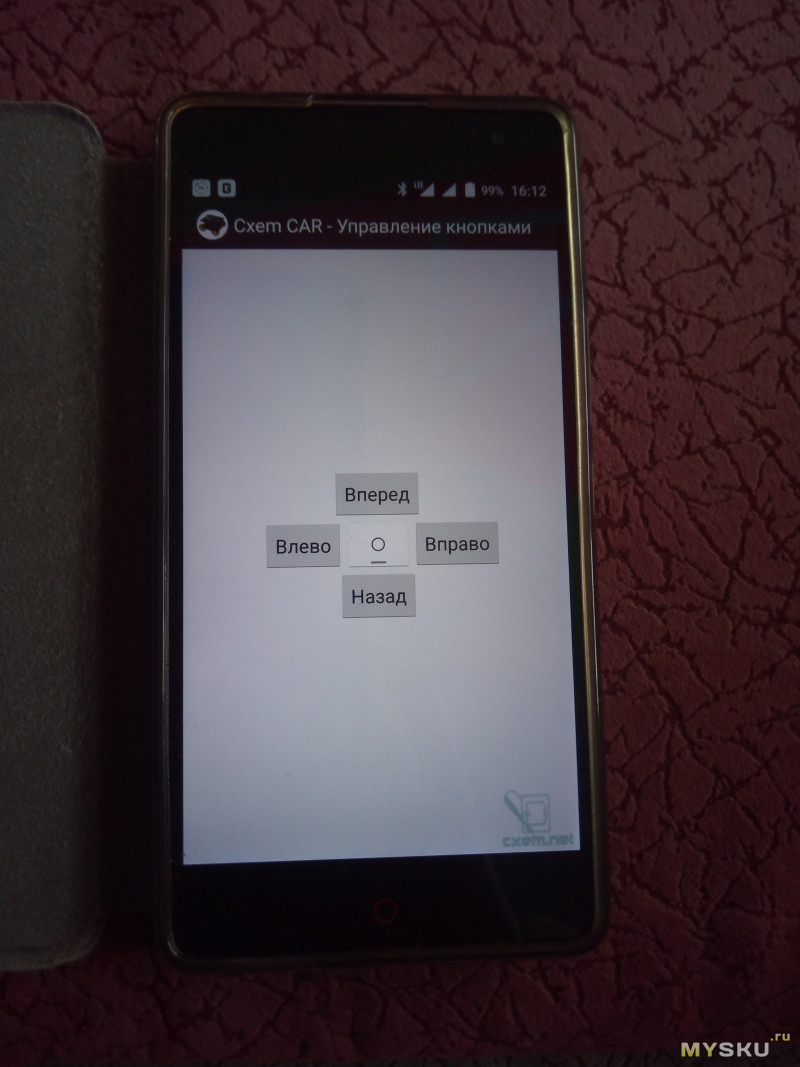
Приложение на Android я взял без изменений.
Программу для Arduino добавил от себя процентов 30.
Было куплено:
Arduino UNO (микросхема на панельке)+кабель
https://aliexpress.com/item/item/igh-quality-One-set-UNO-R3-Official-Box-ATMEGA16U2-MEGA328P-Chip-For-Arduino-UNO-R3-Development/32948661593.html
HC-06 Bluetooth
https://aliexpress.com/item/item/HC-06-Bluetooth-Serial-Pass-through-Module-Wireless-Serial-Communication-HC06-Bluetooth-Module-for-arduino-Diy/32857133517.html
motor shield
https://aliexpress.com/item/item/New-Dual-H-Bridge-DC-Stepper-Motor-Drive-Controller-Board-Module-L298N-for-Arduino-Free-Shipping/32243752190.html
Все было собрано в корпус. Возможность программирования через люк.
Светодиод выведен от Bluetooth
Логика работы:
Включаем луноход звучит сигнал, светодиод BT мигает. Запускаем программу на телефоне, BT диод горит. Если не управлять машиной более 10 мин включается сирена.
Программой можно включать/выключать свет. Движение вперёд, назад, вправо, влево.
При наезде на препятствие reset ардуины, перезапуск программы.
После отладки UNO в принципе можно было поменять на что нибудь другое на постоянку. Но смысла особого не вижу. Места в корпусе полно. Если, что добавлять uno удобнее. Да и бакс экономии погоды не сделает.
Так что оставил uno на постоянку.
Код программы (полностью отлаженная версия):
Дети довольны игрушкой!
Сегодня я расскажу вам о второй жизни лунохода Электроника. Кому интересно прошу под cut:
Восьмидесятые:
В 1986 году на день рождения дядя подарил мне программируемый луноход Электроника. До конца восьмидесятых луноход исправно работал. Далее появились программные глюки луноход включал «лазер» по делу и без дела во время выполнения программы. Закончилось это дело тем, что любая программа выполнялась как бесконечная стрельба… Найти новый прошитый микроконтроллер «уу-1» не представлялось возможным и луноход был убран на дальнюю полку.
Наши дни:
Луноход был извлечён с дальней полки, разобран. Плата с дохлой уу-1 отправилась в коробку с золотосодержащими микросхемами (а золото там даже внешне видно ничего выкусыаать не надо). Контакты под 4*373 (D) и под крону были демонтированы.
Собственно что имеем:
Корпус в состоянии 5+
Полностью исправные моторы (тип танк/трактор правый/левый мотор)
Ведущие колёса с резиновыми кольцами. Резина как новая…
Динамик
Датчик наезда на препятствие в виде двух микриков и планки.
В «бластере» лампочка накаливания была заменена на светодиод.
Была изготовлена NI-CD батарея 8,4v 0,9Ач
Можно было конечно литиевую батарею сделать, но у меня от шуруповертов куча nicd. Выбрал лучшие банки, собрал батарею.
Как показала практика данной батареи для этой игрушки за глаза…
За основу решил взять какой нибудь открытый проект. Нашел на cxem.net
Приложение на Android я взял без изменений.
Программу для Arduino добавил от себя процентов 30.
Было куплено:
Arduino UNO (микросхема на панельке)+кабель
https://aliexpress.com/item/item/igh-quality-One-set-UNO-R3-Official-Box-ATMEGA16U2-MEGA328P-Chip-For-Arduino-UNO-R3-Development/32948661593.html
HC-06 Bluetooth
https://aliexpress.com/item/item/HC-06-Bluetooth-Serial-Pass-through-Module-Wireless-Serial-Communication-HC06-Bluetooth-Module-for-arduino-Diy/32857133517.html
motor shield
https://aliexpress.com/item/item/New-Dual-H-Bridge-DC-Stepper-Motor-Drive-Controller-Board-Module-L298N-for-Arduino-Free-Shipping/32243752190.html
Все было собрано в корпус. Возможность программирования через люк.
Светодиод выведен от Bluetooth
Логика работы:
Включаем луноход звучит сигнал, светодиод BT мигает. Запускаем программу на телефоне, BT диод горит. Если не управлять машиной более 10 мин включается сирена.
Программой можно включать/выключать свет. Движение вперёд, назад, вправо, влево.
При наезде на препятствие reset ардуины, перезапуск программы.
После отладки UNO в принципе можно было поменять на что нибудь другое на постоянку. Но смысла особого не вижу. Места в корпусе полно. Если, что добавлять uno удобнее. Да и бакс экономии погоды не сделает.
Так что оставил uno на постоянку.
Код программы (полностью отлаженная версия):
Программа
#include «EEPROM.h»
#define D1 2 // направление вращение двигателя 1
#define M1 3 // ШИМ вывод для управления двигателем 1 (левый)
#define D2 4 // направление вращение двигателя 2
#define M2 5 // ШИМ вывод для управления двигателем 2 (правый)
#define HORN 11 // доп. канал 1
//#define autoOFF 2500 // кол-во миллисекунд через которое робот останавливается при потери связи
#define cmdL 'L' // команда UART для левого двигателя
#define cmdR 'R' // команда UART для правого двигателя
#define cmdH 'H' // команда UART для доп. канала 1 (к примеру сигнал Horn)
#define cmdF 'F' // команда UART для работы с EEPROM памятью МК для хранения настроек
#define cmdr 'r' // команда UART для работы с EEPROM памятью МК для хранения настроек (чтение)
#define cmdw 'w' // команда UART для работы с EEPROM памятью МК для хранения настроек (запись)
char incomingByte; // входящие данные
char L_Data[4]; // строковый массив для данных левого мотора L
byte L_index = 0; // индекс массива
char R_Data[4]; // строковый массив для данных правого мотора R
byte R_index = 0; // индекс массива
char H_Data[1]; // строковый массив для доп. канала
byte H_index = 0; // индекс массива H
char F_Data[8]; // строковый массив данных для работы с EEPROM
byte F_index = 0; // индекс массива F
char command; // команда: передача координат R, L или конец строки
//int button = 12; // датчик остановки (в текущей версии не используется)
int i;
unsigned long currentTime, lastTimeCommand, autoOFF, tm=1;
void setup() {
tone(9,100,500);
Serial.begin(9600); // инициализация порта
pinMode(HORN, OUTPUT); // дополнительный канал
pinMode(D1, OUTPUT); // выход для задания направления вращения двигателя
pinMode(D2, OUTPUT); // выход для задания направления вращения двигателя
//pinMode(button, INPUT); // датчик остановки
/*EEPROM.write(0,255);
EEPROM.write(1,255);
EEPROM.write(2,255);
EEPROM.write(3,255);*/
timer_init(); // инициализируем программный таймер
}
void timer_init() {
uint8_t sw_autoOFF = EEPROM.read(0); // считываем с EEPROM параметр «включена ли ф-ия остановки машинки при потере связи»
if(sw_autoOFF == '1'){ // если таймер останова включен
char var_Data[3];
var_Data[0] = EEPROM.read(1);
var_Data[1] = EEPROM.read(2);
var_Data[2] = EEPROM.read(3);
autoOFF = atoi(var_Data)*100; // переменная автовыкл. для хранения кол-ва мс
}
else if(sw_autoOFF == '0'){
autoOFF = 999999;
}
else if(sw_autoOFF == 255){
autoOFF = 2500; // если в EEPROM ничего не записано, то по умолчанию 2.5 сек 2500
}
currentTime = millis(); // считываем время, прошедшее с момента запуска программы
}
void loop() {
tm=tm+1; // 4 минуты=3000000
if (tm>3500000){
tone(9,199,999);
digitalWrite(HORN, HIGH);
tone(9,155,505);
delay(700);
digitalWrite(HORN, LOW);
tone(9,253,601);
delay(700);
}
if (Serial.available() > 0) { // если пришли UART данные
tm=1;
incomingByte = Serial.read(); // считываем байт
if(incomingByte == cmdL) { // если пришли данные для мотора L
command = cmdL; // текущая команда
memset(L_Data,0,sizeof(L_Data)); // очистка массива
L_index = 0; // сброс индекса массива
}
else if(incomingByte == cmdR) { // если пришли данные для мотора R
command = cmdR;
memset(R_Data,0,sizeof(R_Data));
R_index = 0;
}
else if(incomingByte == cmdH) { // если пришли данные для доп. канала 1
command = cmdH;
memset(H_Data,0,sizeof(H_Data));
H_index = 0;
}
else if(incomingByte == cmdF) { // если пришли данные для работы с памятью
command = cmdF;
memset(F_Data,0,sizeof(F_Data));
F_index = 0;
}
else if(incomingByte == '\r') command = 'e'; // конец строки
else if(incomingByte == '\t') command = 't'; // конец строки для команд работы с памятью
if(command == cmdL && incomingByte != cmdL){
L_Data[L_index] = incomingByte; // сохраняем каждый принятый байт в массив
L_index++; // увеличиваем текущий индекс массива
}
else if(command == cmdR && incomingByte != cmdR){
R_Data[R_index] = incomingByte;
R_index++;
}
else if(command == cmdH && incomingByte != cmdH){
H_Data[H_index] = incomingByte;
H_index++;
}
else if(command == cmdF && incomingByte != cmdF){
F_Data[F_index] = incomingByte;
F_index++;
}
else if(command == 'e'){ // если приняли конец строки
Control4WD(atoi(L_Data),atoi(R_Data),atoi(H_Data));
delay(10);
}
else if(command == 't'){ // если приняли конец строки для работы с памятью
Flash_Op(F_Data[0],F_Data[1],F_Data[2],F_Data[3],F_Data[4]);
}
lastTimeCommand = millis(); // считываем текущее время, прошедшее с момента запуска программы
}
if(millis() >= (lastTimeCommand + autoOFF)){ // сравниваем текущий таймер с переменной lastTimeCommand + autoOFF
Control4WD(0,0,atoi(H_Data)); // останавливаем машинку
}
}
#define D1 2 // направление вращение двигателя 1
#define M1 3 // ШИМ вывод для управления двигателем 1 (левый)
#define D2 4 // направление вращение двигателя 2
#define M2 5 // ШИМ вывод для управления двигателем 2 (правый)
#define HORN 11 // доп. канал 1
//#define autoOFF 2500 // кол-во миллисекунд через которое робот останавливается при потери связи
#define cmdL 'L' // команда UART для левого двигателя
#define cmdR 'R' // команда UART для правого двигателя
#define cmdH 'H' // команда UART для доп. канала 1 (к примеру сигнал Horn)
#define cmdF 'F' // команда UART для работы с EEPROM памятью МК для хранения настроек
#define cmdr 'r' // команда UART для работы с EEPROM памятью МК для хранения настроек (чтение)
#define cmdw 'w' // команда UART для работы с EEPROM памятью МК для хранения настроек (запись)
char incomingByte; // входящие данные
char L_Data[4]; // строковый массив для данных левого мотора L
byte L_index = 0; // индекс массива
char R_Data[4]; // строковый массив для данных правого мотора R
byte R_index = 0; // индекс массива
char H_Data[1]; // строковый массив для доп. канала
byte H_index = 0; // индекс массива H
char F_Data[8]; // строковый массив данных для работы с EEPROM
byte F_index = 0; // индекс массива F
char command; // команда: передача координат R, L или конец строки
//int button = 12; // датчик остановки (в текущей версии не используется)
int i;
unsigned long currentTime, lastTimeCommand, autoOFF, tm=1;
void setup() {
tone(9,100,500);
Serial.begin(9600); // инициализация порта
pinMode(HORN, OUTPUT); // дополнительный канал
pinMode(D1, OUTPUT); // выход для задания направления вращения двигателя
pinMode(D2, OUTPUT); // выход для задания направления вращения двигателя
//pinMode(button, INPUT); // датчик остановки
/*EEPROM.write(0,255);
EEPROM.write(1,255);
EEPROM.write(2,255);
EEPROM.write(3,255);*/
timer_init(); // инициализируем программный таймер
}
void timer_init() {
uint8_t sw_autoOFF = EEPROM.read(0); // считываем с EEPROM параметр «включена ли ф-ия остановки машинки при потере связи»
if(sw_autoOFF == '1'){ // если таймер останова включен
char var_Data[3];
var_Data[0] = EEPROM.read(1);
var_Data[1] = EEPROM.read(2);
var_Data[2] = EEPROM.read(3);
autoOFF = atoi(var_Data)*100; // переменная автовыкл. для хранения кол-ва мс
}
else if(sw_autoOFF == '0'){
autoOFF = 999999;
}
else if(sw_autoOFF == 255){
autoOFF = 2500; // если в EEPROM ничего не записано, то по умолчанию 2.5 сек 2500
}
currentTime = millis(); // считываем время, прошедшее с момента запуска программы
}
void loop() {
tm=tm+1; // 4 минуты=3000000
if (tm>3500000){
tone(9,199,999);
digitalWrite(HORN, HIGH);
tone(9,155,505);
delay(700);
digitalWrite(HORN, LOW);
tone(9,253,601);
delay(700);
}
if (Serial.available() > 0) { // если пришли UART данные
tm=1;
incomingByte = Serial.read(); // считываем байт
if(incomingByte == cmdL) { // если пришли данные для мотора L
command = cmdL; // текущая команда
memset(L_Data,0,sizeof(L_Data)); // очистка массива
L_index = 0; // сброс индекса массива
}
else if(incomingByte == cmdR) { // если пришли данные для мотора R
command = cmdR;
memset(R_Data,0,sizeof(R_Data));
R_index = 0;
}
else if(incomingByte == cmdH) { // если пришли данные для доп. канала 1
command = cmdH;
memset(H_Data,0,sizeof(H_Data));
H_index = 0;
}
else if(incomingByte == cmdF) { // если пришли данные для работы с памятью
command = cmdF;
memset(F_Data,0,sizeof(F_Data));
F_index = 0;
}
else if(incomingByte == '\r') command = 'e'; // конец строки
else if(incomingByte == '\t') command = 't'; // конец строки для команд работы с памятью
if(command == cmdL && incomingByte != cmdL){
L_Data[L_index] = incomingByte; // сохраняем каждый принятый байт в массив
L_index++; // увеличиваем текущий индекс массива
}
else if(command == cmdR && incomingByte != cmdR){
R_Data[R_index] = incomingByte;
R_index++;
}
else if(command == cmdH && incomingByte != cmdH){
H_Data[H_index] = incomingByte;
H_index++;
}
else if(command == cmdF && incomingByte != cmdF){
F_Data[F_index] = incomingByte;
F_index++;
}
else if(command == 'e'){ // если приняли конец строки
Control4WD(atoi(L_Data),atoi(R_Data),atoi(H_Data));
delay(10);
}
else if(command == 't'){ // если приняли конец строки для работы с памятью
Flash_Op(F_Data[0],F_Data[1],F_Data[2],F_Data[3],F_Data[4]);
}
lastTimeCommand = millis(); // считываем текущее время, прошедшее с момента запуска программы
}
if(millis() >= (lastTimeCommand + autoOFF)){ // сравниваем текущий таймер с переменной lastTimeCommand + autoOFF
Control4WD(0,0,atoi(H_Data)); // останавливаем машинку
}
}
Дети довольны игрушкой!
Самые обсуждаемые обзоры
| +28 |
3642
120
|
Что то в глаз попало.
мальчик Павлик — 36 лет
P.S.: Имеется многолетний опыт владения машинкой «Планетоход» :) если кто не в курсе, то это версия такого же лунохода, но с вылетающим из люка пропеллером.
Мой на год моложе
А превратили в машинку с Д/У.
Жаль не сохранился, я его, когда был маленьким разобрал по запчастям, подаставал все моторчики и родители его выкинули. А ведь в наше время его можно было бы восстановить и сыну была бы очень интересная игрушка. Таких сейчас уже не выпускают
Если всё вернуть как оно было нельзя…
был такой, но с русскими буквами на борту
(всем по секрету — это было примерно в конце 70х или начале 80х годов)
Не переживайте, через год-два они уже будут на своих кораблях, а еще лет через 10-20 уже мы будем без своих кораблей.
ваще до лампочки
Ну даже если предположить, что введут ответные санкции и запретят летать другим, они просто скажут давайте мы с любого олигарха санкции снимем и будем летать дальше, им не откажут :)
Я заметил, что население щас разделяется на патриотов и либералов, в зависимости от того, какая пропаганда им ближе, кремлевская или западная, своей башкой вообще все думать перестали
сначала трубят про то что у нас с США чуть ли не война идет -спустя некоторое время как большое достижение преподносят что замерзающим амерам отправили пару танкеров со сжиженным газом…
«танкер с газом из России добрался до США… в какой-то степени олицетворяет давнюю мечту «Газпрома» о поставках российского газа в США.»
Это тоже самое что замерзающим фашистам в окруженный Сталинград продать пару эшелонов с углем — якобы из гуманных соображений…
Сейчас стоимость одного кресла в «Союзе» для NASA составляет около 80 млн. долларов, то есть один ихний астронавт оправдывает весь запуск с пассажирами и грузом. На извозе Роскосмос зарабатывает в среднем 300-400 млн. долларов в год — и по большей части это именно американские астронавты. Боюсь, что нашей космонавтике станет совсем худо когда американцы откажутся от наших услуг по извозу астронавтов. У нее и так денег постоянно не хватает, а тут еще уйдет такой большой кусок дохода.
Это как раз пример фэйла — больше 20 лет разработки, потрачено 5 миллиарда долларов — и только 2 испытательных пуска, один из которых даже без вывода на орбиту. И это пример успешного развития нашей космической отрасли?
Частная американская компания за это же время и за меньшие деньги разработала две ракеты — причем у одной из них уже штук 6 модификаций — и пилотируемый корабль. Вот ее ракеты летают. Чаще, чем любые другие (даже, наверное, вместе взятые). А ангара уже лет 10 только обещает начать летать.
Что там кто разработал в SpaceX — это еще разобраться надо. Кто какие патенты и технологии им слил и что они реально «разработали».
Спрос на наши ракеты нужен. А политическая и экономическая конъюнктура сами знаете какая.
Меня больше беспокоят направления, в которых такой работы не велось и не ведется. Вот там случись что и вообще ничего не останется.
Вот именно — со всеми вытекающими. И эти вытекающие оптимизмом не светятся.
Даже если они все по готовым чертежам делали (а это совсем не так, у них практически все — своей разработки), то все равно по сравнению с Роскосмосом они выглядят гораздо выгоднее. У Роскосмоса вообще изначально имелся абсолютно весь опыт, накопленный за многие десятилетия. Однако они не смогли не то что что-то новое запустить, но даже удержать позиции в космических перевозках. Вдумайтесь — со всем своим опытом и ресурсами слили частнику-новичку.
Он и был бы, если бы не жадность и недальновидность наших чиновников.
Проект завершён успешно
Но больше летать не будет.Потому что есть конкуренты Королёвцы со своим древним треугольным и неэкономичным хламом Р-7.Который возит сам себя.(Ага вспоминаем провальный Н-1).
А им куда идти в могилу? Щас! Сожрали Челомея, сожрали в своё время Глушко и Янгеля, Просрали Луну, сожрут и Ангару.
Уже -разрабатывают копию Зенита Глушко 70 годов типа своего Союз-5 модульный на замену «плохой» летающей Ангары.Потратят миллиарды рублей и ещё десять-двадцать лет на разработку.Но конкурента СОЖРУТ.
Прогрессивная конструкция — это многоразовые ступени. А Ангара на коммерческом рынке нафиг никому не нужна из-за стоимости запуска.
Кто бы спорил. Средства освоены, какой-то результат показали 5 лет назад, цель достигнута.
Да-да, они и мешают нашей стране.
тут вам даже инвесторы не скажут, сколько денег было потрачено, вы то откуда знаете?
Председатель колхоза генерал-полковник Д. Ф. Устинов предупреждает, что если инцидент повторится, то на поле выйдут сеялки, веялки, молотилки и комбайн с вертикальным взлетом и посадкой, а также с выхлопными газами типа зарин и зоман.
Сообщение ТАСС.
Вчера утром советский мирный трактор с вертикальным взлетом занимался распашкой контрольно-следовой полосы близ китайской границы. Проходивший мимо китайский пограничный патруль произвел в районе дислокации советского трактора одиночный винтовочный выстрел вверх.
Однако тракторист Петров по прозвищу «Старлей» не растерялся: подняв машину в воздух, ответил залпом, прополол танковую дивизию и сто пятьдесят гектаров пехоты противника, расположенные неподалеку в 500 километрах, после чего включил форсаж и вышел на околоземную орбиту.
В связи с инцидентом ТАСС уполномочено заявить: при повторении подобных провокаций советское правительство направит в распоряжение председателя гвардейского краснознаменного бронеколхоза «Путь к победе» генерал-майора Иванова эшелон тракторов, комбайнов, косилок, молотилок, сеялок, веялок и прочей сельскохозяйственной техники, а также партию минеральных удобрений нервно-паралитического действия.
Мы сообщаем вам о вопиющем факте:
На берегах Амура посреди родных полей
Подвергся наш простой советский мирный трактор
Обстрелу шестерых китайских батарей.
Услышав дикий крик китайского десанта,
Советский тракторист, по званию старлей,
Ответил на огонь одним могучим залпом
И уничтожил шесть китайских батарей.
А после, слив бензин и запустив реактор,
Он всех их пропахал и быстро внёс навоз.
Поднялся в небо наш советский мирный трактор
И улетел домой, в родимый свой совхоз.
Назавтра в интервью спецкорам их редакций
Советский бригадир, по званью капитан,
Сказал, что в случае второй подобной провокации
На поле вместо трактора мы выпустим комбайн!
Тогда вспомнил, что из каждой копны соломы может ракета вылететь.
первая попавшаяся ссылка
Допускаю возможность подсоединение на прямую к продуктопроводу для отбора горючки, но там вылезет одна проблема с охранными кранами которые стоят через энное количество километров. краны сами закроются при резком понижении давления перед-после крана (во время отбора горючки), они автоматические и энергонезависимые (работают от давления перекачеваемой среды), по этому их и называют охранными.
И наверно к трубе подбивались не на прямую а через фильтрационно-сепарационную насосную станцию (на автоходу).
Я же не зря предыдущие сообщение написал, нет большей «боли» для начГСМ чем керосин и метанол на хранении, из собственного опыта говорю.
Видел КАК их строили… там толщина бетона более метра!!!
Не удивлюсь что там и спец трубопроводы в полотно заложены.
А вот после постройки они от обычных участков шоссе НЕ отличались.
А на обычное шоссе Ту-22-М3 не посадишь, провалится.
Ну и шоссе в случае конвециональной войны тоже будут бомбить.
Не байка, аналогичные есть в Англии, ФРГ-в Европе.В США вроде без надобности и аэродромов столько что бомбить никаких бомб не хватит.
Использовались как аэродромы подскока и запасные, когда основные разбомблены.Инфраструктура развёртывается передвижная.Вплоть до мягких топливохранилищь из спец резиноткани(НАТО вский вариант).
Но на 100% уверен что в СССР не сильно отличались.
А в те времена конца 70 начала 80.Отследить со спутника строительство и месторасположение такой встройки(и не одной) было весьма затруднительно.А байки про спутники США это просто байки и про номера и про погоны и прочий безграмотный бред.В те времена их «Дырка» имела 1,5м разрешающую способность.Ха-ха-ха-.
А вот сегодня 30см.А реклама… ну говорите и вы как в том анекдоте.Это значит что на фото одна точка имеет размеры 30х30см-даже человека не видно.А машина как чёрточка.И с другой стороны, что предателей в СССР было… не меньше чем сегодня-каждый второй.
И да эти системы для НАТО были подробно описаны в журнале для генштаба СССР «Военное Зарубежное Обозрение» конца 70 годов!!!
А вообще для наших космонавтов даже лазерные пистолеты изобретали для борьбы с США в космосе
Это ваш там на картинке в американца целится? :))
Т.к. сейчас напряжение на моторах выше луноход едет быстрее, чем в оригинале.
можно адаптировать обзор?
у китайцев за три копейки можно любое шасси купить.
А т.к. микруха золотая их все сдали в драгмет ещё в девяностые…
Если и ошибся то не 0 ну 0,1-0,2 может быть(хотя в голове вертится 0,25). А вот в разьёмах на 120 и более контактов… там и поболее.
В каких-то здоровенных конденсаторах и по несколько грамм было, но это же не микросхемы :)
Был у меня такой, тоже кстати подарили на ДР ;), у нас в городе его конечно не было, бабуля в Москве купила, там тоже дефицит он был, как сейчас помню стоил 27рублей в то время как зарплата в среднем рублей 70-75 была.
Я его в школу носил, чем вызывал белую зависть со стороны своих приятелей.
Также можно погуглить Науку и жизнь за 1986 или 1987, где был собственно обзор игрушки и даже фото потрохов и програм мма/ы для программирования, после прочтения которого мне егоии купили.
Увы от него остался только передний или задний мост с движком и колесами и корпус.
Кстати система подсчета пройденного пути была реализована хитро, с помощью герконов и магнитов в средних колесах.
так что зря вы так поторопились, зря.
Ещё есть в продаже www.90is.ru/catalog/igrushki/lunokhod_bigtrak_bolshoy/
Хотя уже китай.
Это просто чудо, что оно всё ещё не заглючило. Принято считать, что в atoi надо передавать ASCIIZ-строки. Строго говоря, можно и не ASCIIZ — atoi работает на редкость вычурно, но в реальной жизни проще записать в конец строки \0, чем потом удивляться side-эффектам.
Так что автору все таки зачёт.
ЗЫ: И нет, я не говорил, что автору незачёт. Зачёт. Но не «Это пять!». )))
Соотношение зарплата/стоимость, если не брать продукты, примерно одинаковое что сейчас, что тогда.
Но пока разобраться не может.
Часть функционала работает, а часть нет.
Залил с сайта все но увы… И ПО для телефона не конектится с блютузом его.
И я увы в программировании ничего не понимаю и помочь не могу.
Оригинальная американская такая
Я до сих пор доволен, что успел купить бойлер Electrolux завода Фагор до остановки производства и переноса в Китай…
На удивление до сих пор выпускается китайцами и продаётся, гуглить по словам луноход bigtrack.
Также есть более новая версия с камерой
Принтер Robotron… моя дипломная работа набита была на БКшке и записана на компакт кассету
А потом я купил 11-ю
2 флопи teac, кнопка halt и turbo, модем 2400 без MNP, потом 9600 с MNP5
Лешке Надежину низкий поклон. Мишке Королеву тоже
в идеале они не должны были перемещаться, либо очень медленно.
а так-же важен был их цвет — зависел от тембра.
Сэр Клайв Синклер очень хорошо продумал всю систему загрузки с магнитофонной ленты.
— Папа, а что такое граммофон?
— Проигрыватель пластинок, только старый.
— Папа, а что такое проигрыватель пластинок?
— Проигрыватель компакт дисков, только старый.
— Компакт дисков???
— Короче, БУМБОКС!
…
границы каждый ставит сам.
п.с. на 4пда есть коллекция с несколькими тысячами игруль.
только на классическую (звуком) загрузку уйдет несколько дней времени.
Нужно лишь сделать кабель(не было же тогда джеков 3.5 мм, только дин5, или я ошибаюсь?)
Дядя за этим луноходом год охотился…
А в 85 у меня угнали велосипед Салют, так я пять лет по магазинам ходил пока в 90 мне не улыбнулась удача «выбросили» велосипеды…
Мы ровесники.
Тоже был 01й :)
Потом понял что это ручка.
тогда паяли, строгали, вырезали, клеили, сейчас — купить готовое.
сравните количество образовательных журналов и телепрограмм…
так, например, знания «что такое горячо», получают потрогав ладошкой горячий утюг — для индивидуума это большой опыт, но для науки с квантовыми полями и гипермегасверх проводимостями это ниочем.)))
и ни американская электроника, ни шведский автопром, ни баварская пивоварня тут вообще не при чем.
речь шла о развитии людей тогда и сейчас, а не о различиях в научном прогрессе между странами.
сейчас нормального радиотехника поискать надо, а в 70-80х в каждом доме жил дядя Миша, могущий поковырятся паяльником в телевизоре или магнитофоне.
простите, но нынче эпоха потреблядства.
После сборки, во время высыхания, Бабушка уронила с антресоли… всё остальное время, был нескончаемый ремонт :(
ЗЫ: «Давно здесь сидим...» © БСП )))
meshok.net/item/103393154_Игрушка_СССР_электромеханическая_Пожарная_машина_с_лестницей_Норма_Таллин_машинка
с пультом ДУ (не беспроводным, как подумалось многим)
причём управление было реализовано через гибкий тросик, который приводил в действие тяги в самой машине.
есть и более современная версия с камерой и прочими плюшками
ну что автор ;), назначай цену :)) ;)
Вместо диода можно реальный мощный лазер забабацать, прожигающий черный пластик и тп.
На улице меня решили проверить патрули, вывернули все из карманов, пересмотрели ключи, отобрали деньги(за них вызвали такси до участка). А дело было в том, что на связке нашли раритетный ключик от заводной игрушки, типа такой: И предьявили, мол вчера был избит сотрудник органов в этом районе и у него были отобраны ключи от наручников… вот Вам лихие 2000-ные
https://aliexpress.com/item/item/Teching-1-24/32833592096.html
Качество плохое, другого не сохранилось. Потом немного проапгрейдил, добавил сигнал, фару, регулировку скорости и поворотное колесо на подшипниках из HDD.
Я даже откопал свой вариант из 2014 года: hackaday.io/project/2373-smartphone-bluetooth-controlled-toy
С тех пор у меня была вторая версия на более прочной механической платформе, а потом ещё третья версия на ESP8266.
Помню первые восторженные чувства когда оно поехало. Эх, поднять что ли это заново…
Я ещё удивлялся тогда, что это у него за единица расстояния «около 30 см» Ж-)
Единственное что оставил это Lego вот его чего то жалко выбрасывать.
на авито вроде тоже видел в продаже.
я вот такой еще помню у себя :)
github.com/HowardLJTaylor/VintageBigTrackArduino
Его хотели выбросить, но я решил оживить его. Родного пульта не было, поэтому решил внедрить в него новые технологии, но вся механическая часть осталась оригинальная как моторы так и редукторы.
По инструкциям с канала Alex Gyver я сделал вполне играбельный экземпляр, который по функциональности стал даже лучше чем был. Т.к. управление двигателями теперь выполнялось драйвером с плавной регулировкой тяги. Т.е. можно плавно регулировать скорость и угол поворота вплоть до вращения на месте.
Тут же в теме выкладывали паспорт с номером 95267 с датой выпуска октябрь 1987.
Вот и считайте примерно 100000 за 1,5 года…
просто если предположить что если за 1,5 года выпустили 100000шт, а их выпускали года 2,5 или даже 3, то тогда должны были выпустить примерно 200-250 000 штук, вроде и не много на многомиллионную страну, но и не мало, т.е у людей должно оставаться много экземпляров (даже по прошествии многих лет и кто-то выбросил, кто разломал или еще что-то), но на данный момент данная вещь довольна редка и предложение/ия как ни странно очень ограниченно, это было бы не так будь выпущенно много штук, всё-таки предположу что выпущено было гораздо меньше экземпляров.
впрочем точный ответ могут дать только архив/ы предприятии если таковые конечно сохранились.
может быть игрушка и не станет хитом, но определённую долю продаж особенно среди почитателей оригинального BigTrack может снискать.
Сейчас, в 38 лет, поиграл бы с удовольствием, но игрушка навсегда осталась в городе всеобщего дефицита...(((
Отлично!!!
Надо было восстановить конечно с функциями программирования…
Плюс!
www.youtube.com/watch?v=dPkhWOamZBA